Finite element
based level
set
method with
various
reinitializations for
viscous
incompressible
two-phase
flows
Norikazu
Yamaguchi
Faculty of Human Development, University of Toyama
3190Gofuku,Toyama-shi, Toyama930-8555,Japan
Abstract. Themainobjective of the presentpaper isnumericalcomputation of
viscousincompressible two-phase flows by finite element based level set method.
A numerical resultconcerning quantitative benchmarkproblem proposed by
Hys-inget al.[11]isreported.
1.
Introduction
In this paper,
we are
concerned with numerical simulation of two-dimensionalvis-cous
incompressible and immiscible two-phase flows by finite element based level set method.The motion ofviscous incompressible and immiscible two-phase flows is
mathe-matically formulated
as a
freeboundaryvalueproblemofthe Navier-Stokes equations.Infreeboundaryvalueproblemsof theNavier-Stokes equations, unknown variables
are
notonlyvelocity andpressurebutalso the location of interface between two fluids. We
are
particularly interested in deformation ofthe interface and flownear
the interface.Thus, numericalcomputation is
one
of thereasonable waysto observethem, becausenumerical computation enables
us
tosee
the developmentprocess
ofthe motion and deformation.Viscous incompressible two-phaseflows include various interesting phenomena in
fluid dynamics,e.g.,risingbubble,dropletimpactand dam breakingphenomena. Since there are a lot of literature concerningrising bubble problem intwo space dimension,
we
also considerrising bubbleproblem in $2D$(howeverwe
do not relyon
anyspecial-ties of$2D$fordiscretization oftheproblem). Inparticular,
a
numericalresultconcerningquantitativebenchmarkproblem proposed by Hysing etal. [11] is reported.
The present
paper
is apartofjoint workwith N. Hamamuki(HokkaidoUniversity)and K. Ohmori (University ofToyama). Details of
our
results will be published ina
forthcomingpaper.
1.1. Governing equations
Firstofall, let
us
givea
governing equationsof the incompressible two-phaseflows.Let$\Omega\subset \mathbb{R}^{2}$
be
a
boundeddomainwithboundary$\partial\Omega.$ $\Omega$iscontainer of fluidsandisassumed to be dividedintotwopartsbyinterface$\Gamma(t)$,thatis,$\Omega=\Omega_{1}(t)\cup\Gamma(t)\cup\Omega_{2}(t)$
.
Here and inwhat follows, $\Omega_{j}(t)$ is filled with fluid$j(j=1,2)$ and fluid 1 andfluid 2fluid$j(j=1,2)$,respectively. Throughoutthepresent
paper, we
assume
that$\rho_{j}$ and$v_{j}$are
constants $(j=1,2)$.
Themotion offluids in$\Omega$ is govemed by the Navier-Stokes equations.
$\rho(\partial_{t}u+u\cdot\nabla u)=div(2v\mathbb{D}(u)-p\mathbb{I})+F,$ $x\in\Omega,t>0$, (l.la)
$divu=0,$ $x\in\Omega,t>0$
.
(l.lb)The first equation (l.la) is balance of momentum and second
one
(l.lb) is equationofcontinuity. Here $u=(u_{1}(t,x),u_{2}(t,x))$ and$p=p(t,x)$
are
velocity andpressure,
respectively. They
are
unknown functions. $\rho=\rho(t,x)$ and $v=v(t,x)$are
density andviscosity which
are
given by$(\rho,v)=\{\begin{array}{l}(\rho_{1},v_{1}) , x\in\Omega_{1}(t) ,(\rho_{2},v_{2}) , x\in\Omega_{2}(t) .\end{array}$ (l.lc)
Forthe density offluids,
we
assume
that$\rho_{1}>\rho_{2}$, thatis, fluid 1 is heavier than fluid2(forexample, fluid 1 iswater and fluid2isoil
or
air). $\mathbb{D}(u)=((\partial_{j}u_{i}+\partial_{i}u_{j})/2)_{1\leq ij\leq 2}$is thedeformationtensorand$\mathbb{I}=(\delta_{ij})_{1\leq ij\leq 2}$isthe $2\cross 2$unit matrix. 2$v\mathbb{D}(u)-p1$isthe
Cauchy stress tensorassociated withflow. $F$ denotesthebody force acting
on
fluid. Inwhatfollows,
we suppose
that$F$ is gravitational force given by$F=f_{gravity}=(0,-\rho g)$, (l.ld)
where$g$ is
a
positiveconstant whichindicates gravitational acceleration.In addition to $u$ and $p$, location of interface $\Gamma(t)$ is also unknown in two-phase
flows. We need additional equation
on
the interface $\Gamma(t)$.
On the interface $\Gamma(t)$, thesurface tension is taken into account. Thus, the interface conditions
on
$\Gamma(t)$are as
follows.
$[u]|_{\Gamma(t)}=0,$ $[2v\mathbb{D}(u)-pI]|_{\Gamma(t)}\cdot n_{\Gamma(t)}=\sigma\kappa n_{\Gamma(t)}$
.
(l.le)Here$\sigma>0$denotes surfacetensionconstant, $K=\kappa(t,x)$isthecurvatureof theinterface
$\Gamma(t)$, and
$n_{\Gamma(t)}$ isunit normal at the interface$\Gamma(t)$ pointing into$\Omega_{1}(t)$
.
Square bracketdenotesjump of quantity
$[\bullet]_{\Gamma(t)}=\bullet|_{\Omega_{1}\cap\Gamma(t)}-\bullet|_{\Omega_{2}\cap\Gamma(t)}.$
Theinterface condition(l.le)implies thatthevelocity continuouslyacrossthe interface
$\Gamma(t)$ and surface tensionbalances thejumpof normal stress.
To observemotion of fluids in$\Omega$by
means
ofnumericalcomputation,we
will solveinitial boundary value problem of(1.1) withinitial velocity $u(t,O)=u_{0}$, initial
inter-face $\Gamma(0)\subset\Omega$and
some
boundary condition for$(u,p)$on
$\partial\Omega.$1.2. Related works andaimof thepaper
As
was
mentioned,we
consider only rising bubble problem. Since rising bubble isa typical phenomena of interfacial flows, there
are
much related works. Sussman,Smereka
&
Osher [23] studiedrising bubble problem in $2D$ by finite difference basedlevel set method. The level set method introduced in Osher& Sethian [17] is
one
ofthe standard waystocapture theinterface$\Gamma(t)$ in numerical computation of interfacial
Concerning rising bubble problem, there
are
alsoa
lot of related works by finiteelementmethod, e.g.,Gross, Reichelt&Reusken[6],Tabata[24],Tornberg&Engquist
[26],Gross
&
Reusken[7] andreferences therein. Concerningrisingbubbleproblem byfinite element method, Hysing etal.[11] proposed a quantitative benchmark problem
(see alsoDoyeuxetal. [5]). Our aim of the presentpaper is contribute the benchmark
problem proposed by Hysing etal.[11].
Aswill be seen in Section2, interface $\Gamma(t)$
can
be trackedby transportequation ofthe level set function (interface is characterized by
zero
level set of level setfunction).The level setfunction is required to have signed distance function property. However,
transport equation does not
conserve
such a property. Thereforewe
have to maintainsuch
a
property in numerical computation. Theprocedure ofsigned distancefunctionmaintenance is called reinitialization. There
are
variousways
ofreinitialization, e.g.,method based
on
partial differential equationsandfastmarchingmethod(seee.g., [7]).We adopt reinitialization based
on
partial differential equations. In [23],reinitial-izationbased
on
firstorderhyperbolic equationwas
introduced. Lateron
[23],Sussman&
Fatemi [22] proposeda modifiedversionof [23] (see also [8]). Recently,new
reini-tialization procedures
are
proposed by Liuetal. [12] and Basting&
Kuzmin [1]. Themethod of [1] isbased
on
nonlinearellipticpartialdifferentialequation. Thereforeitiseasy to implement the method of[1] in terms of finite element method. Inparticular,
the method of[1]
seems
tobe goodone
froma
point view ofcomputational cost. Weuseclassical reinitialization [23, 22] andreinitialization dueto Basting
&
Kuzmin [1] inour
numericalcomputation (onlythelattercase
is reported. Theformercase
will be reported inseparatepaper).1.3. 0rganizationof thepaper
Thispaperis organizedas follows. In Section 2 the level setmethod isintroduced. By
usingthe level set method
we
reformulate the freeboundary valueproblem of(1.1) tobe suitable form for numericalcomputation. Discretizationof reformulatedproblem is
alsogiven in Section2. InSection3reinitialization of thelevel setfunctionis discussed.
Tworeinitializations based
on
partial differential equationsare
introduced. We showa
ournumerical resultin Section 4. We use$FreeFem++for$ourcomputation.
2.
Level
set
method and
discretization
The level set method introduced by Osher
&
Sethian [17] isone
of the convenientways to capturethe interface $\Gamma(t)$ in two-phase flows. In this section,
we
shall givea
reformulated problem of(1.1)bythe level setmethod and give
a
discreteapproximationofresultantproblem.
2.1. Levelsetmethod
To capture the interface $\Gamma(t)$ in numerical computation, we
are
due to the level setmethod introducedby Osher& Sethian [17]. First ofall, let
us
introduce the level setfunction. Let $\phi=\phi(t,x)$ be
a
continuous scalar function definedon
entire domain $\Omega$and$t>0$, whose value is positivefor$x\in\Omega_{1}(t)$, negative for $x\in\Omega_{2}(t)$ and
zero
for $x\in\Gamma(t)$. Thenwe
callfunction $\phi$the level set function.A suitable choice
is
to take$\phi$equaltosigned distance function to the interface$\Gamma(t)$.
$\phi(t,x)=\{\begin{array}{ll}dist (x,\Gamma(t)) , x\in\Omega_{1}(t) ,0, x\in\Gamma(t) ,-dist(x,\Gamma(t)) , x\in\Omega_{2}(t) .\end{array}$ (2.1)
Here dist denotes the distance function: dist$(x, \Gamma)\prime=\min_{y\in\Gamma}|x-y|$
.
Since $\phi$ is signeddistance function, $|\nabla\phi|=1$ (a.e.) must be satisfied. From (2.1), it is clear that
zero
level setof$\phi$characterizes the interface$\Gamma(t)$.
$\Gamma(t)=\{x\in\Omega|\phi(t,x)=0\}$
.
(2.2)When
we
choose$\phi_{0}=\phi_{0}(x)$ insucha
way
that$\phi_{0}$issigned distance function to theinitial interface$\Gamma(0)$, the level set.function $\phi$ is transportedby the following transport
equation:
$\frac{\partial\phi}{\partial t}+u\cdot\nabla\phi=0, t>0, x\in\Omega$, (2.3a)
$\phi(0,x)=\phi_{0}(x) , x\in\Omega$
.
(2.3b)Since the interface$\Gamma(t)$ is represented
as
(2.2),it isenough tosolve the above transportequation(2.3) (numerically) andinvestigatethe
zero
level setof$\phi.$Next
we
considerareformulation of the Navier-Stokesequations (l.la). The levelsetfunction $\phi$ enables
us
toreformulate $\Omega_{j}(t),\Gamma(t)$ and $(\rho,v)$as
convenientrepresen-tationfor
our
purpose.
By usingthe level set function $\phi,$ $\Omega$ and $(\rho,v)$are
rewrittenas
follows.
$\Omega=\{\begin{array}{ll}\Omega_{1}(t) , \phi>0, \Gamma(t) , \phi=0, (\rho,v)=[Case]\Omega_{2}(t) , \phi<0; \end{array}$ (2.4)
For later
purposes, we
now
introducethe Hevisidefunction $H(\phi)$.
$H(\phi)=\{\begin{array}{l}1, \phi\geq 0,0, \phi<0.\end{array}$ (2.5)
By using $H(\phi)$, $\rho$and $v$in (2.4)
are
rewrittenas
follows.$\rho=\rho(\phi)=\rho_{1}H(\phi)+\rho_{2}(1-H(\phi))=\rho_{2}+(\rho_{1}-\rho_{2})H(\phi)$, (2.6)
$v=v(\phi)=v_{1}H(\phi)+v_{2}(1-H(\phi))=v_{2}+(v_{1}-v_{2})H(\phi)$
.
(2.7)Next
we
shall givea
level set formulation of the surface tension (l.le). By usinglevel set function $\phi$, the surface tension force is converted into
a
volume force oftheform
$f_{ST}=\sigma\kappa n_{\Gamma(t)}\delta(\phi)$
.
(2.8)Here andinwhatfollows,$\delta(\phi)$ denotes Dirac’sdeltafunctionwhosesupport isthe
zero
level set of$\phi$
.
Furthermore, normalvector$n_{\Gamma(t)}$ andcurvature $\kappa$
are
alsogiven by$n_{\Gamma(t)}= \frac{\nabla\phi}{|\nabla\phi|}|_{\phi=0}$, (2.9)
Summing up the above, the resultant problem is the following system of Navier-Stokes equations and transport equation.
$\rho(\phi)(\partial_{t}u+u\cdot\nabla u)=div(2v(\phi)\mathbb{D}(u)-p\mathbb{I})+f_{ST}+f_{gravity}$, (2.11a)
$divu=0$, (2.11b)
$\partial_{t}\phi+u\cdot\nabla\phi=0$
.
(2.11c)By thelevel setfunction,
our
aim isreducedto solve initial boundary value problem of(2.11) with appropriateinitial data$(u,\phi)|_{t=0}$ and boundary conditions.
2.2. Discretization
Inthissubsection, weshall giveadiscretization for (2.11).
Approximation of$\delta_{\epsilon}(\phi)$ and $H_{\epsilon}(\phi)$
.
For numericalcomputationof(2.11),we
needsome
approximations of$H(\phi)$ and$\delta(\phi)$ in terms ofcontinuousfunctions definedover
$\Omega$
.
So, instead of$H(\phi)$ and$\delta(\phi)$,
we use
the following $H_{\epsilon}(\phi)$ and $\delta_{\epsilon}(\phi)$ withsome
$\epsilon>0.$
$H(\phi)\approx H_{\epsilon}(\phi)=\{\begin{array}{ll}1, \phi\geq\epsilon,\frac{1}{2}+\frac{1}{2}(\frac{\phi}{\epsilon}+\frac{1}{\pi}\sin(\frac{\pi\phi}{\epsilon})) , |\phi|<\epsilon,0, \phi\leq-\epsilon\end{array}$ (2.12)
and
$\delta(\phi)\approx\delta_{\epsilon}(\phi)=\frac{d}{d\phi}H_{\epsilon}(\phi)=\{\begin{array}{ll}\frac{1}{2\epsilon}(1+\cos(\frac{\pi\phi}{\epsilon})) , |\phi|<\epsilon,0, |\phi|\geq\epsilon.\end{array}$ (2.13)
Here $\epsilon>0$denotes thicknessof the numerical interface. Since ideal thickness of the interfaceis equalto zero, wewould like to take $\epsilon>0$ as small aspossible. However,
we
need to choose $\epsilon>0$ in such a way that $\epsilon>h$, where $h$ denotes the mesh sizenear the interface. A typical choice of$\epsilon$ is $\frac{3}{2}h$, where $h>0$indicates the mesh size
near
the $\Gamma(t)$.
As will beseen
in Section4,we use
adaptive mesh refinement (AMR).According to AMR,
we can
puta
lot of meshpointsnear
the interface. Hence,we can
choose $\epsilon>0$suitably small(seeFigure4.3).
Penaltymethod. Oneofthemain difficulties ofthe Navier-Stokes equations iscaused
bypressureterm$p$in(l.la) and divergencefreeconstraint(l.lb).
To relax difficulties arising from the pressure,
some
stabilization techniques arewidely usedinnumericalcomputation ofthe Navier-Stokesequations. Wehereusethe
penalty method introduced by Temam [25]. Let $\alpha>0$ be parameter ofpenalization.
Thenwe shallreplace the solenoidal condition (l.lb)by following
one.
$divu=-\alpha p$
.
(2.14)It would be expected that $(u^{(\alpha)},p^{(\alpha)}),$which denotes solution of the Navier-Stokes
equations with (2.14), tends to genuine solution $(u,p)$
as
$\alphaarrow+0$.
Actually, sucha limit is justified by Temam [25], Shen [20] and the author [27] for stationary and
instationaryproblems.
Incontext offinite elementmethod, (2.14)changes the variational structure of the
Characteristic method. For approximation of the convection terms in the
Navier-Stokes equations (2.11a) and transport equation (2.3a),
we are
due to characteristicmethod(see e.g.,Pironneau [18]).
Let $w\in \mathbb{R}^{m}(m\geq 2)$ begiven vectorfield. Then
we
consider material derivative of scalar function $\varphi$with vector$w.$$\frac{D\varphi}{Dt}:=\frac{\partial\varphi}{\partial t}+w\cdot\nabla\varphi$
.
(2.15)Suppose that vectorfield $X(t)\in \mathbb{R}^{m}$ defined
on
$(0,T$] solves the following ordinarydifferential equations.
$\frac{dX}{dt}=w(t,X(t))$
.
(2.16)By chain rule,
we see
that$\frac{d\varphi}{dt}(t,X(t))=\frac{D\varphi}{Dt}$
.
(2.17)Let $\tau>0$betime step size. Applying the backward Eulerapproximationto the left
hand side of(2.17),weobtain
$\frac{D\varphi}{Dt}=\frac{\varphi(t,X(t))-\varphi(t-\tau,X(t-\tau))}{\tau}+O(\tau)$
.
(2.18)Set$t_{n}=n\tau(n\in N\cup\{0\})$
.
Let$x\in\Omega\subset \mathbb{R}^{m}$ bearbitrary point andletus
consider initialvalue problem of (2.16) with initial condition $X(t_{n})=x$
.
Then the genuine solutionof such
an
initial valueproblem at$t=t_{n-1}$ is given by $X(t_{n-1})=X^{n}+O(\tau^{2})$, where$X^{n}=x-w(t_{n},x)\tau$ isapproximatesolutionof(2.16)withtheaid ofEulermethod. By
the above arguments andTaylor’stheorem,
we
have$\frac{D\varphi}{Dt}(t_{n},x)=\frac{\varphi(t_{n},x)-\varphi(t_{n-1},X^{n})}{\tau}+O(\tau)$
.
(2.19)(2.19) gives
us a
first order approximation of the material derivative (2.15). Secondorderapproximation for convection-diffusion
or
Navier-Stokes equations is alsofoundin Rui
&
Tabata [19],Notsu&
Tabata [13] andBen\’itez&
Berm\’udez [2].Semi-discretization in time. We
are
now ina
positionto give a semi-discretizationintimefor(2.11).
Let $(u^{n},p^{n},\phi^{n})=(u^{n}(x),p^{n}(x),\phi^{n}(x))$ be approximation of $(u,p,\phi)|_{t=t_{n}}(t_{n}=$
$n\tau)$
.
Applying thecharacteristicapproximation and penalty methodto (2.11),we
havethefollowing semi-discretization in timefor (2.11).
$\rho_{\epsilon}(\phi^{n})\frac{u^{n+1}-u^{n}\circ X^{n}}{\tau}=div(2v_{\epsilon}(\phi^{n})\mathbb{D}(u^{n+1})-p^{n+1}\mathbb{I})+f_{ST}^{n}+f_{gravity}^{n}$, (2.20a)
$divu^{n+1}+\alpha p^{n+1}=0$, (2.20b)
$\underline{\phi^{n+1}-\phi^{n}x^{n}}_{=0}$
, (2.20c)
$\tau$
where$X^{n}=x-u^{n}\tau$ and
$\rho_{\epsilon}(\phi^{n})=\rho_{2}+(\rho_{1}-\rho_{2})H_{\epsilon}(\phi^{n})$,
$v_{\epsilon}(\phi^{n})=v_{2}+(v_{1}-v_{2})H_{\epsilon}(\phi^{n})$,
$f_{ST}^{n}=\sigma K_{\epsilon}^{n}|_{\Gamma(t_{n})}\delta_{\epsilon}(\phi^{n}) , f_{gravity}^{n}=(0,-\rho_{\epsilon}(\phi^{n})g)$,
Assume that triplet $(u^{n},p^{n},\phi^{n})$ is given in (2.20). Then the systemof (2.20a) and
(2.20b) is the Stokes type systemconcerning unknownvariables $(u^{n+1},p^{n+1})$
.
Hence,standard techniquesto solvetheStokes type system by finite element method(see.e.g,
[3], [18])
can
be applicable.Full discretization. Finally
we
considerfulldiscretization for(2.11). Let$V_{h},\Pi_{h}$ and$X_{h}$befinite dimensionalspaces
so
that$V_{h}\subset H^{1}(\Omega)^{2},\Pi_{h}\subset L_{0}^{2}(\Omega)$,$X_{h}\subset L^{2}(\Omega)$.
Here$L_{0}^{2}( \Omega)=\{p\in L^{2}(\Omega)|\int_{\Omega}pdx=0\}.$
For numerical stability,
we
choose $V_{h}\cross\Pi_{h}$as
P2-P1 finite element space (standardHood-Taylorelements)and$X_{h}$
as
PI finite elementspace.Considering variational formulation ofsemi discretizedproblem (2.20) and its
ap-proximation, we arrive at full discretization of(2.11a) and $(2.11b)$: Find $(u_{h}^{n+1},p_{h}^{n+1})$
so
that$\frac{1}{\tau}(\rho_{\epsilon}(\phi_{h}^{n})u_{h}^{n+1},v_{h})+(2v_{\epsilon}(\phi_{h}^{n})\mathbb{D}_{h}(u_{h}^{n+1}),\mathbb{D}_{h}(v_{h}))$
$-(p_{h}^{n+1}, div_{h}v_{h})=\frac{1}{\tau}(u_{h}^{n}\circ X^{n})+(F(\phi_{h}^{n}),v_{h})+b.d.t.$, (2.21a)
$(div_{h}u_{h}^{n+1}+\alpha p_{h}^{n+1},q_{h})=0$, (2.21b)
for any $v_{h}\in V_{h}$ and$q_{h}\in\Pi_{h}$
.
Here “b.d.$t$.
denotes terms arising fromboundary and $)$ denotes $L^{2}$ innerproduct. For the transport equation, we do not need to considerweakformulation. Hence by (2.20c),
we
have the followingexplicitformula.$\phi_{h}^{n+1}=\tau\phi_{h}^{n}\circ X^{n}$
.
(2.21c)Of
course
itis possibletoconsider weak formulation associated with(2.20c).3. Reinitialization
Level set methodis
one
ofthesuitablemethods for numericalcomputation of interfacialproblems. In two-phaseflows, thelevel set $\phi=\phi(t,x)$ is driven by transport equation
(2.3). As
was
stated before, $\phi$mustbea
signed distance function (SDF), which satisfythe Eikonal equation $|\nabla\phi|=1$ (a.e.). However, the transport equation (2.3) does not
conserve
sucha
propertyeven
if theinitialdata $\phi_{0}$has SDF property.In numerical computation, $\phi_{h}^{n}$ may lose such an important property in numerical
computation
as
$n$ increases. Asa
consequence ofthis undesirablebehavior, numericalresultwill be incorrect, if
we
donotuse
any maintenancefor level setfunction.The procedure for recovering SDFproperty iscalled reinitialization (or
redistanc-ing). There
are
several ways ofreinitialization. In thispaper, we
consider tworeini-tialization procedures based
on
partial differential equations (PDEs). The first one isclassical procedure proposed bySussman, Smereka
&
Osher [23]. The first procedureis based on
a
first order hyperbolic PDE. The second one is recent development byBasting
&
Kuzmin [1]. The second procedure is basedon a
nonlinear elliptic PDE,3.1.
Reinitializationwith hyperbolicPDESussman, Smereka&Osher[23] studied incompressible two-phaseflows by finite
dif-ference based level set method. In [23], they introduced
a
reinitialization basedon
hyperbolicPDEand reportedits effectiveness by
some
numerical computations.The reinitialization based
on
hyperbolic PDE is summarizedas
follows. Supposethat $\phi=\phi(t,x)$ is a level set function, but it does not have SDF property $(|\nabla\phi|=1$
(a.e.)). Obtaining
some
function $\psi$so
that $\psi$ has thesame zero
level setas
$\phi$ andhas SDF property is objective of reinitialization. Let $\psi=\psi(s,x;t)$ be solution to the
followinginitial valueproblem.
$\frac{\partial\psi}{\partial s}=sgn(\phi)(1-|\nabla\psi|) , s>0,x\in \mathbb{R}^{2}$, (3.1a) $\psi(0,x;t)=\phi(t,x) , x\in \mathbb{R}^{2}$
.
(3.1b)where $s\geq 0$indicatespseudo-time. If$\psi$ is stationary solution of(3.1a), then itwould
be expected that $\psi$ has SDF property (if such
a
stationary solution is asymptoticallystable). Hence for sufficiently large $s>0$,
one can use
$\psi(s,x;t)$as
reinitialized $\phi.$Such
a
numericalsolutioncan
be obtained by pseudotime stepping.Since (3.1a) is first order hyperbolic partial differential equation,
we
needsome
stabilization technique for stable numerical computation. Converting (3.1a) into
con-vective form is
one
of suitable reformulations. Set $w=sgn(\phi)\nabla\psi/|\nabla\psi|$.
Then (3.1a)is rewritten
as
the followingequation.$\frac{\partial\psi}{\partial s}+w\cdot\nabla\psi=sgn(\phi) , w=sgn(\phi)\frac{\nabla\psi}{|\nabla\psi|}$
.
(3.2)Since(3.2)isatransportequation with
source
term, stabilizationtechnique (e.g.,char-acteristicmethodandupwind techniques)
can
be applied.In numerical computation for initial value problem (3.2),
we
need appropriateap-proximationofthe sign function $sgn(\phi)$
.
Typicalways
ofapproximationsare
sgn$( \phi)\approx sgn_{\epsilon}(\phi)=\frac{\phi}{\sqrt{\phi^{2}+\epsilon^{2}}}$
or
$\frac{\phi}{\sqrt{\phi^{2}+\epsilon^{2}|\nabla\phi|^{2}}}$ (3.3)with parameter$\epsilon>0$, which is
a
regularization parameter. The size of $\epsilon$ is suitablydetermined by $h$ which indicates the mesh size
near
the interface. It should be notedthat $sgn(\phi)$ and $sgn_{\epsilon}(\phi)$ has the same sign. Hence the regularization (3.3) conserves
zero
level setof$\phi.$As far
as
the authorknows, thereare no
rigorous justification that asymptoticpro-files of(3.1)is signed distance function tothe
zero
level set of$\phi$.
For suchaproblem,we
havea
mathematical resultas
follows.Theorem 3.1. Let $d(x)$ be signeddistance
function
to thezero
level setof
$\phi$, whosesign is the
same
as$\phi$.
Then therehold that the solutionof
(3.1)tendsto$d(x)$ as $sarrow\infty$locally and uniformly in$\mathbb{R}^{2}.$
Theorem 3.1 is
a
mathematical justification of the reinitialization basedon
(3.1).Proofis carriedoutwith theory ofviscosity solution [4]. Details will bepublished in
a
3.2. Reinitializationwith elliptic PDE
Recently Basting
&
Kuzmin[1] introduceda
reinitialization based on energyminimiz-ing principle. Accordminimiz-ing to Basting
&
Kuzmin [1],we
shall explain reinitializationwith elliptic PDE.
In context ofpurereinitialization,reinitializedlevel setfunction wouldbestationary
solutionto
an energy
minimizinggradient flow of the form$\frac{\partial\psi}{\partial s}+\frac{\partial E}{\partial\psi}=0$, (3.4)
where $E(\psi)$ is a suitable energyfunctional and $\partial E/\partial\psi$ is the Euler-Lagrange form of
theG\^ateaux derivative. Theleast-squares solutionto the Eikonalequation $|\nabla\psi|=1$ is
defined by
$E( \psi)=\frac{1}{2}\int_{\Omega}(|\nabla\psi|-1)^{2}dx$
.
(3.5)By using (3.5), (3.4)isreduced to thenonlinearparabolic equation
$\frac{\partial\psi}{\partial s}-div(\nabla\psi-\frac{\nabla\psi}{|\nabla\psi|})=0$
.
(3.6)If $|\nabla\psi|>1$, then (3.6) is diffusion. On the other hand if $|\nabla\psi|<1$, then (3.6) is
anti-diffusion. (3.6)provides
us
areinitialization with parabolic PDE.If initial datais givenby original level set function $\phi$, which does not have SDF property. Then asymptotic
profile of(3.6) would be reinitialized level setfunction.
Toobtainreinitialized levelsetfunction by(3.2)or(3.6),weneedpseudo-time
step-ping. Basting
&
Kuzmin [1] proposeda
reinitialization basedon
penalized minimizingproblem such that
$\frac{\partial E}{\partial\psi}+\frac{\partial P}{\partial\psi}=0, P(\psi;\phi)=\frac{\beta}{2}\int_{\{\phi=0\}}\psi^{2}d\sigma$ (3.7)
where $\beta\gg 1$ isparameterofpenalization. Sinceanydisplacement of the
zero
level setwould increase the valueof$P(\psi;\phi)$, the numerical solutionwill preserve theshape of
zero
level setof$\phi$for large$\beta.$Let$\phi$be alevelset function without SDF property. A variational formulation
asso-ciated with(3.5) is given by
$((1- \frac{1}{|\nabla\psi|})\nabla\psi,\nabla\varphi)_{\Omega}+\beta\langle\psi,\varphi\rangle_{\{\phi=0\}}=0$, (3.8)
for any $\varphi\in C^{\infty}(\Omega)$
.
Since (3.8)can
be regardedas
a weakformulation ofa
nonlin-ear
elliptic PDE,one
can
easily compute numerical solution to (3.8)by finite elementmethod. Of
courese
(3.8)isnonlinear,we
seek numericalsolutionto(3.8)bysuccessiveapproximation asfollows.
$\psi^{(0)}=\phi$, (3.9a)
$( \nabla\psi^{(n+1)},\nabla\varphi)+\beta\langle\psi^{(n+1)},\varphi\rangle_{\{\phi=0\}}=(\frac{\nabla\psi^{(n)}}{|\nabla\psi^{(n)}|},\varphi) , n\geq 0$
.
(3.9b)If $\psi^{(n)}$ is given, (3.9b)
can
be regardedas
a weak formulation of Poisson typeequa-tion withpenalty term. One
can
obtainnumerical solution to (3.9b) by finiteelement4.
Numerical experiments
Inthissection,
we
shall reportour
numerical result.4.1. Quantitative benchmark problem
As
was
mentioned in Section 1,Hysingetal.[11] introduceda
quantitative benchmarkproblem of twodimensional rising bubble (precise settings of thebenchmarkproblem
will be shown). Since exact solution for rising bubble problem is notknown, it
seems
tobe worthwhile well to
compare
numerical solution with other numerical solutions bysuch
a
quantitativebenchmarkproblem.Hysingetal.[11] studiedtwotest
cases
(Case 1 and Case2)by quantitativecompar-ison between threeEuropean research groups. Two groups
are
adopted finite elementbased levelset method. Later
on
[11], Doyeuxetal. [5] alsotried thesame
benchmarkproblemby$Feel++$
.
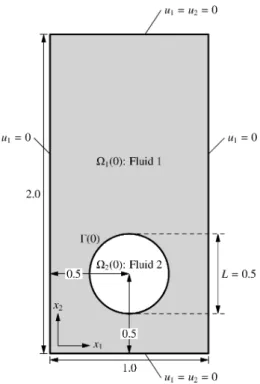
We also try the quantitativebenchmarkproblem.Figure 4.1: Initial state andboundaryconditions
Initialstateand boundary conditions. In the benchmark problem, thecontainerof
fluids is given by $\Omega=(0,1)\cross(0,2)$
.
Initially bubble $(=$fluid 2$)$ is completelysur-rounded by fluid 1 andshape of initial bubble is circlewith radius $r_{0}(=0.25)$centered
at(0.5,0.5). Tobeprecise, initial interface is given by
$\Gamma(0)=\{(x_{1},x_{2})|(x_{1}-0.5)^{2}+(x_{2}-0.5)^{2}=r_{0}^{2}\}, r_{0}=0.25$
.
(4.1)For (4.1), initial level set function is signed distance function to $\Gamma(0)$, which is given
by
$\phi_{0}=\sqrt{(x_{1}-05)^{2}+(x_{2}-05)^{2}}-r_{0}^{2}$
.
(4.2)Next we shall mention the boundary conditions. On the top/bottom walls of $\Omega,$
boundary condition:
$u\cdot n=0, (\mathbb{D}(u)n)-(n\cdot \mathbb{D}(u)n)=0, x\in\partial\Omega_{top/b\circ ttom}$ (4.3)
is imposed (the secondcondition is Neumann type boundary conditions for tangential
component of the normal stress). Since the unit outer normal to left/right walls is
$(\mp 1,0)$, (4.3) is reducedto$u_{1}=0.$
Figure4.1 is
a
imageof initialconfiguration of the benchmarkproblem.Physical constants. Two dimensionlessnumbers
are
usedin risingbubble problem.Below, $\mathcal{R}$
and $S$ denote the Reynolds number and E\"otv\"os number (Bond number),
respectively. $R$ and$S$
are
definedasfollows.$\mathcal{R}=\frac{\rho_{1}V_{g}L}{v_{1}}, S=\frac{\rho_{1}V_{g}^{2}L}{\sigma}$
, (4.4)
where $V_{g}=\sqrt{2gr_{0}}$ is the gravitational velocity, $L=2r_{0}$ is characteristic length. The
E\"otv\"os numberindicates theratio of gravitational forces to surface tension. Table4.1
lists thephysicalconstants and dimensionlessnumbers whichspecify twotest
cases.
Table
4.1:
Physicalconstants anddimensionless numbersRoughly speaking, the surface tension is strong in Case 1 and weak in Case 2.
Since the surface tension is strong in Case 1,
we
have to take temporal step size $\tau$very small for numerical stability. Therefore
we
require much computational costs.However, strong surfacetension force make shape of bubble stable. Actually, bubble
is not splitted in
our
numerical computation. On the other hand, bubble would split,because of weak surface tension. In stability ofthe shape ofbubble, Case 2 is more
severe
thanCase 1.Inthis
paper,
we
shall try only Case2. Ournumericalresultconcerning Case 1 willbereportedin
a
separatedpaper.Benchmark values. In benchmark problem ofHysing et al. [11],
some
benchmarkquantities
are
used.Center of
mass.
Totrack the translation ofbubble, it iscommon
touse
the centerof
mass
definedas
follows.$X_{c}(t)=(X_{c,1}(t),X_{c,2}(t))$, $X_{\mathcal{C},i}(t)= \frac{1}{|\Omega_{2}(t)|}\int_{\Omega_{2}(t)}x_{j}dx$ $(j=1,2)$
.
(4.5)The
mean
velocity of bubble. To observe rising speed ofbubble, the followingmean velocityof bubble isused.
$U_{c}(t)=(U_{c,1}(t),U_{c,2}(t))$, $U_{cj}(t)= \frac{1}{|\Omega_{2}(t)|}\int_{\Omega_{2}(t)}u_{j}dx$ $(j=1,2)$
.
(4.6)$U_{c,2}(t)$ is called rise velocity. By the
use
of $U_{c,1}(t)$,one can
investigate horizontalsymmetricityofthemotion.
Remark
4.1.
Since $1-H(\phi(t))$ is indicator functionon
$\Omega_{2}(t)$, $X_{cj}(t)$ and $U_{cj}(t)$$(j=1,2)$
are
computedbythe followingformulae.$X_{cj}(t)= \int_{\Omega}(1-H(\phi))x_{j}dx/\int_{\Omega}(1-H(\phi))dx,$
$U_{c,i}(t)= \int_{\Omega}(1-H(\phi))u_{j}dx/\int_{\Omega}(1-H(\phi))dx.$
Circularity. The degreeofcircularity $\chi=\chi(t)$ is defined
as
$\chi(t)=\frac{P_{a}}{P_{b}}=\frac{Perimeterofarea-equiva1entcircle}{Perimeterofbubb1e}=\frac{\pi d_{a}(t)}{P_{b}}$
.
(4.7)Here$P_{a}(t)$ denotes theperimeterof
a
circle with diameter$d_{a}(t)>0$ and sucha
circlehas
area
equaltothat ofbubble at withperimeter$P_{b}(t)$.
By the level setfunction$\phi$andapproximation of Dirac’s delta $\delta_{\epsilon}(\phi)$, $P_{b}(t)$ is given
and approximatedby
$P_{b}(t)= \oint_{\{\emptyset=0\}}d\sigma\approx\int_{\Omega}\delta_{\epsilon}(\phi)dx$
.
(4.8)Additional values. In addition to the above benchmark values,
we
also observeadditional two values forchecking SDFproperty ofthe level set function$\phi$ and
mass-preservation offluid2.
In order tocheck SDFproperty of$\phi$,
we
observe$L^{1}$-mean
value$of|\nabla\phi|.$$|| \nabla\phi(t)||:=\frac{1}{|\Omega|}\int_{\Omega}|\nabla\phi(t,x)|dx$
.
(4.9) If$\phi(t,x)$ satisfies the Eikonal equation $|\nabla\phi(t,x)|=1$ (a.e.), then $\Vert\nabla\phi(t)||=1$ holds.However, $||\nabla\phi(t)||=1$ does notimply $|\nabla\phi(t,x)|=1$ (a.e.). Hence,wecall $||\nabla\phi||=1$
pseudo SDFproperty. Sinceit is hard to check SDF property foreverymeshpoints,
we
checkonly pseudoSDF property.
Ideally volume of bubble is preserved. Thus, it isimportanttochecktimeevolution
of volume ofbubble in numerical computation. VolumeofbubbleisLebesgue
measure
of$|\Omega_{2}(t)|$.
Byusing thelevel setfunction, $|\Omega_{2}(t)|$ isgiven by$| \Omega_{2}(t)|=\int_{\Omega_{2}(t)}dx=\int_{\Omega}(1-H(\phi))dx\approx\int_{\Omega}(1-H_{\epsilon}(\phi))dx$
.
(4.10)4.2. Numerical experiments
In thissubsection,
we
shall showour
numericalresult. Thecomputationwas
performedon
Apple iMac (Late 2012)with 3.$4GHz$IntelCore i7processor
and$32GB1600MHz$DDR3 memory.
We
use
$FreeFem++^{1}[9$, 10$]$ forour
numerical computation. $FreeFem++is$a
pro-gramminglanguageand software for numerical
computation
ofpartial differentialequa-tionsby
means
of finiteelementmethod. In$FreeFem++$,thereare
variouslinearsolversandvariousfinite elements(fordetails,see [10]). Wesolve alinear system derived from
(2.21)by UMFPACK, whichis a sparse linearsolver. We adopted elliptic
reinitializa-tion. The maximal observation time is $T_{\max}=3.0$ and time step size ofthe following
computationis $\tau=10^{-3}.$
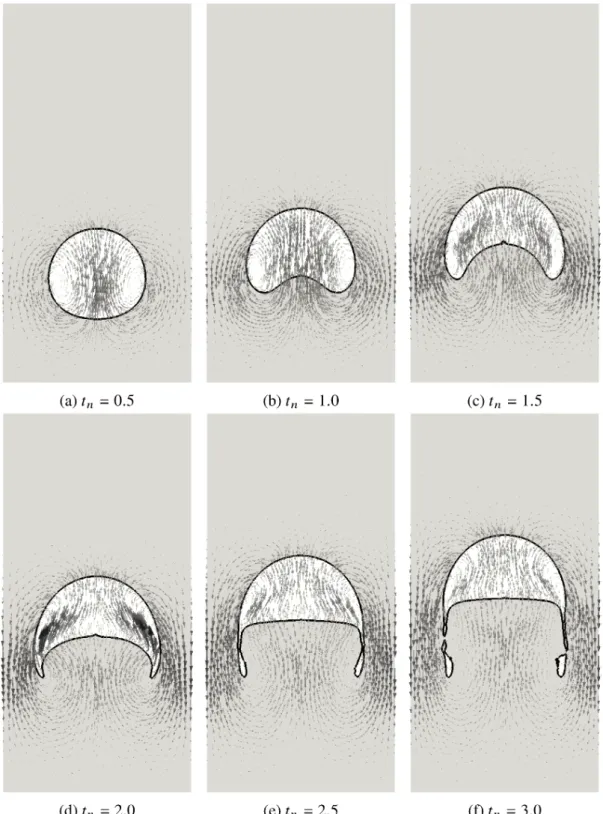
Figure 4.2 shows time evolution of
zero
level set and velocity vector field ofourcomputationand Figure 4.4shows trajectoryofcenter of
mass
$X_{c}(t_{n})$.
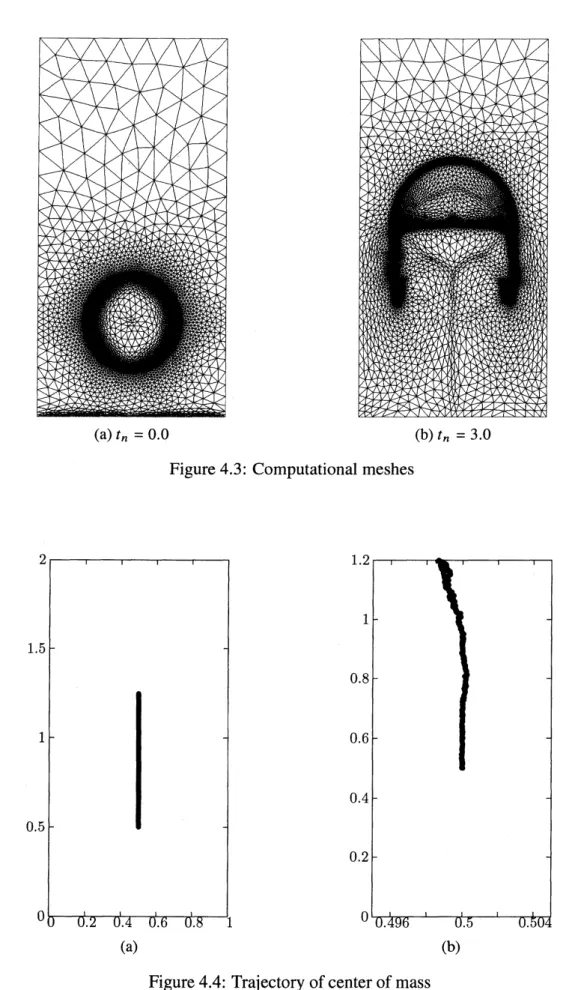
We
use
adaptivemesh refinement(AMR). AMRenablesus tocapture theinterface$\Gamma(t)$ precisely, becausewe can put muchmesh points
near
the interface. Since we useAMR, number of triangles changes step by step. Average of number of triangles is
about 10,000and number ofverticesis about 5,000.
Figure4.3 showscomputationalmeshesat$t_{n}=0.0$(initial state)and$t_{n}=3.0$(final
state). Onecan
see
thatcomputational meshsuggeststhe shapeof interface (Fig.4.3(b)and Fig. $4.2(f)$). Such
an
AMRtechnique isone
ofmainfeature ofour
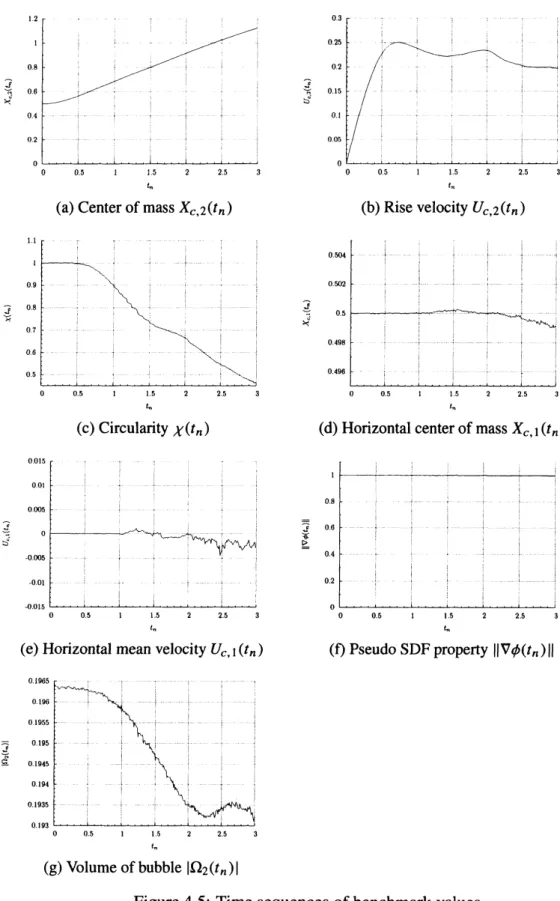
computation.Timesequences ofBenchmark values. Figure4.5 showstime sequences of
bench-mark values.
Fig4.5(a), (b)and(c)indicatetime
sequences
ofvertical location of center ofmass
$X_{c,2}(t_{n})$, rise velocity $U_{c,2}(t_{n})$ and circularity $\chi(t_{n})$
.
Each graph is similar tocorre-sponding one in Hysing et al.[11] and Doyeux et al.[5]. In particular,
our
result issimilar to that of FreeLIFE(EPFL Lausanne) in [11].
Fig4.5(d) and (e) indicate timesequences ofhorizontal location of center of
mass
$X_{c,1}(t_{n})$ andhorizontal
mean
velocity$U_{c,1}(t_{n})$.
These valuesare
used toobservationforsymmetricityof the rising bubble. $\overline{X_{c,1}}=0.499992787$ and$\overline{U_{c,1}}=8.75\cross 10^{-5}$, where $X_{c,1}(t_{n})$ and$\overline{U_{c,1}}$
denote timeaverageof$X_{c,1}(t_{n})$ of$U_{c,1}(t_{n})$,respectively. The
horizon-tal motion of bubble is almost symmetric, butfrom macroscopic viewsymmetricityof
themotionbreaks after$t_{n}>1.$
Fig 4.5(f) indicates time sequence of $||\nabla\phi_{h}(t_{n})||$ from macroscopic view. Time
average of$||\nabla\phi_{h}||$ is $||\nabla\phi_{h}||=0.997385$and the final value is $||\nabla\phi_{h}(3.0)||=0.993951.$
Byreinitialization,$\phi_{h}^{n}$ almostsatisfiespseudo SDF property for all$n.$
Fig4.5(g) indicatestime sequenceof the volume of fluid2. Ideally $|\Omega_{2}(t)|$ must be
conserved. However, the final valueis $|\Omega_{2}(3.0)|=0.193442$
.
Since $|\Omega_{2}(0)|=\pi r_{0}^{2}\approx$O. 19635, 1.5% of fluid2
was
lostinour
computation.Acknowledgment. The author would like to
express
his sincere thanks to ProfessorKatsuhiOhmori for fruitful discussion.
References
[1] C.Basting andD.Kuzmin. Aminimization-basedfinite elementformulationfor
interface-preservinglevelsetreinitialization. Computing,$95(1,$suppl.):S13-S25,2013.
[2] M. Ben\’itez andA. Berm\’udez. A second order characteristics finite element scheme for
naturalconvectionproblems. J. Comput. Appl.Math., $235(11):3270-3284$,2011.
[3] S. C. Brenner and L. R. Scott. The mathematical theory
offinite
elementmethods,vol-ume 15of Texts in AppliedMathematics. Springer, NewYork,thirdedition,2008.
[4] M. G. Crandall, H. Ishii, and P.-L. Lions. User’s guide toviscosity solutions of second
order partial differentialequations. Bull.Amer.Math Soc. (N.S.),$27(1):1-67$, 1992.
[5] V. Doyeux, Y. Guyot, V. Chabannes,C. Prud’homme,and M. Ismail. Simulation of
two-fluid flows using a finite element/level set method. Application to bubbles and vesicle
dynamics. J. Comput. Appl.Math.,246:251-259,2013.
[6] S. GroB, V. Reichelt,andA. Reusken. Afinite element based levelset method for
two-phaseincompressibleflows. Comput. $V\iota s$
.
Sci.,$9(4):239-257$ , 2006.[7] S. Gross and A. Reusken. Numerical methods
for
two-phaseincompressible flows,vol-ume40ofSpringer Series in Computational Mathematics. Springer-Verlag,Berlin, 2011.
[8] D. Hartmann,M.Meinke, andW.Schr\"oder. Differentialequation based constrained
reini-tializationfor level set methods. J. Comput. Phys., $227(14):6821-6845$ ,2008. [9] F.Hecht. Newdevelopmentin$freefem++$
.
J. Numer.Math.,$20(3-4):251-265$ , 2012.[10] F.Hecht. $Freefem++$
.
LaboratoireJacques-LouisLions,Universit6PierreetMarieCurie,2015.
[11] S. Hysing, S. Turek, D. Kuzmin, N.Parolini, E. Burman, S. Ganesan, and L. Tobiska.
Quantitative benchmark computationsoftwo-dimensionalbubble dynamics. Internat. $J.$
Numer.MethodsFluids,$60(11):1259-1288$ ,2009.
[12] C. Liu, F. Dong, S. Zhu, D. Kong, and K. Liu. New variationalformulations for level
set evolution withoutreinitialization with applications to image segmentation. J. Math
Imaging Vsion,41(3):194-209,2011.
[13] H. Notsu and M. Tabata. A single-step characteristic-curve finite element scheme of
second order in time for the incompressible Navier-Stokes equations. J. Sci. Comput.,
38(1):1-14,2009.
[14] K. Ohmoriand N. Yamaguchi. in preparation.
[15] K. Ohmori and N. Yamaguchi. Visualization of nonlinear phenomena with $FreeFem++$
andparaview: Application to reaction-diffusion system and fluid dynamics. $Mem.$ $Fac.$
Human.Devel. Univ. Toyama.,$9(1):221-241$ , 2014(in Japanese).
[16] K. Ohmori, N. Yamaguchi, N. Hamamuki, and F. Hecht. Numerical investigation of
two-fluid flows by$FreeFem++and$themathematicalvalidation of thereinitialization. $in$
preparation.
[17] S. Osher and J. A. Sethian. Fronts propagating withcurvature-dependent speed:
algo-rithmsbasedonHamilton-Jacobi formulations. J. Comput. Phys.,$79(1):12A9$, 1988.
[18] O. Pironneau. Finiteelementmethods
for fluids.
John Wiley &Sons Ltd., Chichester, 1989.[19] H.Rui and M. Tabata. A second ordercharacteristicfinite element scheme for
[20] J. Shen. Onerrorestimates ofthe penaltymethod for unsteady Navier-Stokes equations.
SIAM J. Numer.Anal.,$32(2):386-403$, 1995.
[21] R. S.Strichartz. A guide todistribution theory andFourier
transforms.
World ScientificPublishing Co.Inc., RiverEdge,NJ,2003.
[22] M. Sussman and E. Fatemi. Anefficient,interface-preserving level set redistancing
algo-rithm andits applicationto interfacial incompressible fluid flow. SIAMJ. Sci. Comput.,
20(4):1165-1191 (electronic), 1999.
[23] M. Sussman,P. Smereka, andS. Osher. A levelsetapproach forcomputingsolutions to
incompressible two-phase flow. J. Comput. Phys., 114:146-159, 1994.
[24] M. Tabata. Finite element schemes based on energy-stable approximation fortwo-fluid
flowproblems with surfacetension. HokkaidoMath. J., $36(4):875-890$,2007.
[25] R. Temam. Unem\’ethoded’approximationde lasolutiondes \’equations de Navier-Stokes.
Bull. Soc.Math. France,96:115-152, 1968.
[26] A.-K.Tomberg and B. Engquist. Afinite elementbasedlevel-set method formultiphase
flowapplications. Comput. $Vs$
.
Sci.,$3(1-2):93-101$,2000.[27] N. Yamaguchi. Mathematicaljustification ofthepenalty method forviscous
(a)$t_{n}=0.5$ (b)$t_{n}=1.0$ (C)$t_{n}=1.5$
(d)$t_{n}=2.0$ ($e$)$t_{n}=2.5$ $(t\gamma t_{n}=3.0$
Figure 4.2: Time evolution of the
zero
level set of $\phi_{h}(t_{n})$ and velocity vector fields.(a)$t_{n}=0.0$ (b)$t_{n}=3.0$
Figure 4.3: Computational meshes
(a) (b)
$\ell_{h},$
$\ell_{h},$ $\ell_{n}$
(a)Center ofmass$X_{c,2}(t_{n})$ (b)Rise velocity$U_{c,2}(t_{n})$
$\overline{\vee s\vee}$ $\hat{\frac{s}{\dot{\aleph}^{-}}}$
05 15
$25 05 1B 25$
$t_{\eta}$ $l_{n}$
(c)Circularity$\chi(t_{n})$ (d)Horizontalcenterofmass$X_{c,1}(t_{n})$
$\overline{\frac{\prime_{arrow}\prime}{\dot{b}arrow}}$
$t_{n}$
(e) Horizontalmeanvelocity$U_{c,1}(t_{n})$ (f)Pseudo SDF property $||\nabla\phi(t_{n})||$
$\underline{\overline{\hat{\check{c^{\aleph}}\sim^{l}}}}$
(g)Volume ofbubble $|\Omega_{2}(t_{n})|$