IO-Link
Specification in brief
1 目次
1 目次 ...2 2 IO-Link システム概要 ...3 2.1 電源投入後 ...4 3 IO-Link プロトコル ...5 3.1 プロセスデータ (PD) ...5 3.2 サービスデータ (SD) ...5 3.3 イベント ...6 3.4 伝送性能、リトライ、 QoS ...6 3.5 伝送速度と同期 ...6 3.6 テレグラムとその構造 ...7 4 パラメータデータ交換 ...9 5 IO-Link システム構成 ... 11 5.1 The IO-Link デバイス ... 11 5.2 IODD と翻訳ツール ... 12 5.3 IO-Link マスタ... 132 IO-Link システム概要
IO-Link システムは IO-Link デバイス(一般にセンサー、アクチュエータ、またはその組み合 わせ)と標準の 3 線式センサー/アクチュエータケーブル、そして IO-Link マスタで構成され ます。マスタはどのようなデザインでも、またどのような保護等級でもかまいません。以下 がシステム構成の例です。: Figure 1: システム構成例 Link マスタには一つ、または複数のポートがあります。マスタの各ポートには 1 台の IO-Link デバイスが接続可能です。IO-IO-Link はフィールドバスとは異なりポイントツーポイント 通信を行います。 Figure 2: IO-Link ポイントツーポイント接続2.1 電源投入後
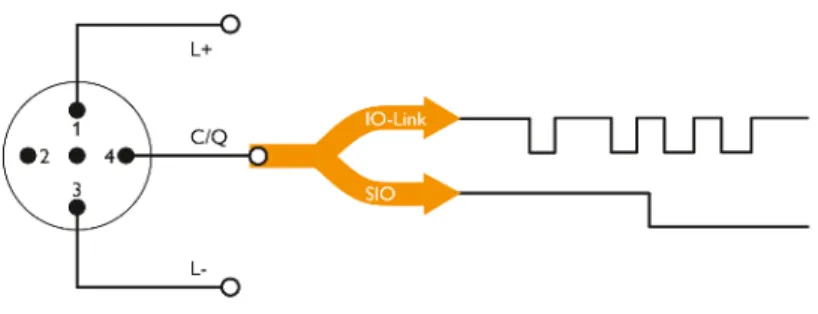
初期段階ではデバイスは常時SIO モード(スタンダード I/O モード)の状態です。マスタのポ ートは異なるコンフィギュレーションデータを保有しています。あるポートがSIO モードに 設定されれば、マスタはそのポートを通常のデジタル入力のように動作させます。ポートが コミュニケーションモード(COM モード)に設定されれば、マスタはそのポートに接続された IO-Link デバイスを探します。このプロセスが wake-up です。Figure 3: IO-Link SIO モードと COM モード
Wake-up の間、マスタは定義された信号を送信しデバイスからの応答を待ちます。マスタは 定義された最高速のボーレートで送信を行いますが、うまく通信出来なかったら、次に早い ボーレートで送信を行います。マスタは各ボーレートでデバイスを3 回コールします。マス タが(デバイスが wake-up 状態等の)レスポンスを受信すれば通信を開始します。最初にマス タとデバイスは通信パラメータを交換し、その後サイクリックプロセスデータの交換を開始 します。 オペレーション中にデバイスが外されると、マスタは通信中止を検出しコントロールシステ ムに報告し(この点はフィールドバスと同じ)、周期的にデバイスを wake-up させます。再度 Wake-up が成功すれば、その後再度通信パラメータが読込まれ有効となります。必要であれ ばサイクリックデータの交換も開始します。 マスタが通信を中断すると、マスタとデバイス両方ともオリジナルモード(SIO モード)に戻 ります。 この機能がFall back です。
3 IO-Link プロトコル
基本的には3 つのタイプのデータが交換されます。: サイクリックデータ(プロセスデータ) アサイクリックデータまたはサービスデータ イベント IO-Link デバイスは IO-Link マスタの要求後にのみデータを送信します。アサイクリックデー タとイベントはマスタから明確に要求されます。サイクリックデータはマスタのアイドルテ レグラムの後に送信されます。3.1 プロセスデータ (PD)
デバイスのプロセスデータは、2 バイト以内のプロセスデータ幅のデータフレームで周期的 に伝送されます。プロセスデータ幅が2 バイト超えれば分割され複数のサイクルで伝送され ます。 プロセスデータが無効の場合は診断メッセージが送信されます。3.2 サービスデータ (SD)
サービスデータは常に非周期的に交換され、常にIO-Link マスタの要求で実施されます。先 ずIO-Link マスタはデバイスにリクエストを送信しデバイスが応答します。この手順は、マ スタからデバイスへの書込データ、デバイスからの読込データ共同様です。サービスデータ はパラメータ値またはデバイスの状態の読込に使用できます。またパラメータ値の書込また はコマンド送信にも使用できます。 SD と PD は一つのテレグラムまたは分割されたテレグラムで伝送されます。典型的なデータ 交換は以下のやり方で行われます。 Figure 4: IO-Link テレグラム構造 テレグラム構造の詳細については”テレグラムタイプとその構造”の項を御参照下さい。3.3 イベント
イベント発生時、デバイスはプロセスデータテレグラムのCHECK/STAT バイトの 7 ビット目 にある”イベントフラグ”をセットします。マスタはセットビットを検出し報告されたイベン トを読込ます。イベントが読込まれている間、サービスデータ交換は行われません。これに より、汚染、オーバーヒート、配線の短絡等のイベントまたはデバイス状態をIO-Link マス タを経由しPLC またはモニタに転送できます。 IO-Link マスタはマスタのイベントとステータスを自分で発生させ、上位のフィールドバス に転送できます。マスタのイベントとしてはオープンサーキット、通信中断、オーバーロー ド等があげられます。3.4 伝送性能、リトライ、 QoS
IO-Link は非常に安定した伝送システムです。24V レベル電圧で動作します。仮に 1 フレー ムの伝送に失敗してもマスタのリクエストは2 回繰り返されます。2 回目のリクエストでも 失敗となった場合のみ、マスタは通信中止を検出し上位のコントロールシステムに報告しま す。マスタはテレグラムのリトライ回数で伝送性能(QoS=Quality of Service)を計測しま す。3.5 伝送速度と同期
IO-Link の仕様書では伝送速度(ボーレート)は 4.8Kbps と 38.4Kbps が定義されています。通 常IO-Link デバイスはどちらかのボーレートに対応します。IO-Link マスタは 4.8 と 38.4 の 両方に対応しなければなりません。 サイクルタイムはテレグラム長とマスタ、デバイス内の遅延時間で構成されます。38.4Kbps の場合サイクルタイムは概ね2ms になります。 トータルタイムはデバイスにより特定される最小サイクルタイムと、マスタで特定される同 期またはパラメータで決められるサイクルタイムにより決定されます。 マスタの各ポートごとに異なった応答時間をパラメータ設定できます。デバイスのアプリケ ーションはマスタのサイクルに同期します。同じマスタの異なるポートのデバイスアプリケ ーションを同期させることも可能です.3.6 テレグラムとその構造
IO-Link 仕様書ではプロセス入力データと出力データのサイズにより異なるテレグラムタイ プを定義しています。 通信を確立するために、マスタはデバイスの通信パラメータを決定します。関連する情報は プロセスデータ長になります。プロセスデータ長をベースにIO-Link マスタは、どのテレグ ラムタイプをサイクリックデータ交換に使用するかを決定します。通信確立の間、マスタは テレグラムタイプ0 を使用します。以下のテレグラムタイプが定義されています。Frame type Length of process input data
[bytes] Length of process output data [bytes]
0 0 0
1 See below See below
2.1 1 0 2.2 2 0 2.3 0 1 2.4 0 2 2.5 1 1 Table 1: テレグラムタイプ テレグラムタイプ1 は、デバイスのプロセス入力と出力データの合計が 2 バイトを超える場 合に使用されます。テレグラム構造は複数のIO-Link サイクルで構成されます。 “サービスデータ”の項で示されるテレグラムはタイプ 2.1 のテレグラムになります。デバイ スは1 バイトのプロセスデータを送信します。下図の上では、デバイスはプロセスデータバ イトに1 バイトのサービスデータを追加して送信、下では、マスタは 1 バイトのサービスデ ータをデバイスに送信しているイメージになります。 Figure 5: フレームタイプ 2.1
各テレグラムの内容については以下の表で紹介します。 Figure 6: マスタのコマンド/チェックシーケンス Table 2: R/W 値 Table 3: データチャンネル値 Table 4: フレームタイプ値 Figure 7: デバイスのチェック/ステータスシーケンス Table 5: イベントビット値
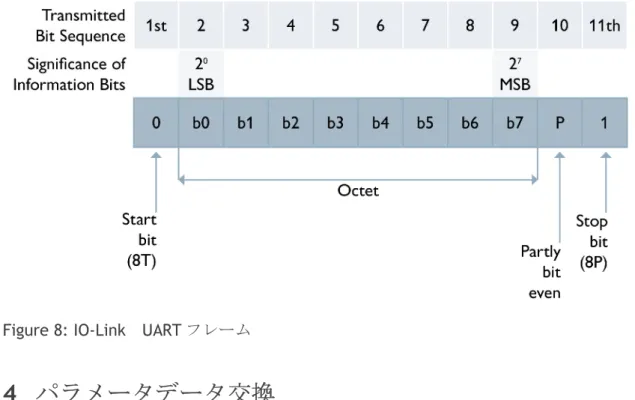
IO-Link 物理層での伝送のために、各バイトは UART フレームにパックされマスタ/スレーブ 間では半2 重モードで伝送されます。
Figure 8: IO-Link UART フレーム
4 パラメータデータ交換
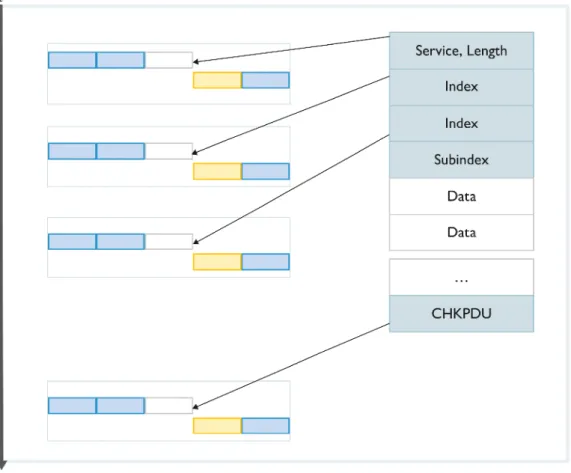
IO-Link デバイスと PLC 間でのデータ交換のために、IO-Link マスタは IO-Link データをフィ ールドバスのエリアにマッピングします。この方法はフィールドバスへのIO-Link マップと いいます。IO-Link マスタが(Figure1 のように)各社のバックプレーンバス経由で PLC に接続 される場合、IO-Link データはバックプレーンバスにマッピングされてから PLC に伝送され るか、あるいはPLC から IO-Link マスタそして IO-Link デバイスに伝送されます。IO-Link マ ップはPROFIBUS、PROFINET、INTERBUS、ASi、EtherCAT 用に規定されています。 IO-Link デバイスからのプロセスデータはフィールドバスまたはバックプレーンバス経由で のサイクリックデータトラフィックに転送されます。サービスデータはPLC から明確にリク エストまたは認識されなければなりません。それ故SPDU(サービス プロトコル データ ユニット)は IO-Link 仕様書に定義されています。 各PLC メーカーは各社 PLC システム用にカスタマイズされた機能ブロック(FB)を提供してい ますが、この機能ブロックを使って、IO-Link マスタがコントロールプログラムで IO-Link デ バイスとのアサイクリック通信を行うプログラムを作成できます。機能ブロックではどの IO-Link マスタ(どのフィールドバスデバイス)か、そしてどのポートのデータが交換されるか を定義します。リクエストは同時にIO-Link デバイスに送信されます。 パラメータ値とステータスはIO-Link デバイスのインデックスとサブインデックスでリクエ ストできます。IO-Link マスタでは、リクエスト(Read Write Service)は IO-Link 固有の SPDU にコーディングされ IO-Link インターフェース経由でデバイスに転送されます。 SPDU はデータが読込まれたか書込まれたかを特定します。パラメータ値の読込または書込 は使用しているインデックスで定義されます。SPDU の構成は以下のようになっています。
Figure 9: SPDU の構成 232 バイトまでのサイズで 32768 のインデックスを IO-Link 経由でアドレス割付ができます。 IO-Link 仕様書は以下のようなサービスを規定しています。 D10 Vendor Name D12 Product Name IO-Link デバイスがどのようなものかは上のサービスで識別できます。 フィールドバス上では、IO-Link マスタは通常のフィールドバスデバイスのように表示され、 (GSD、FDCML、GSDML 等の)デバイス記述によって各ネットワーク用コンフィギュレータに リンクされます。これらファイルにはポート数等の通信と属性が記載されています。しかし、 どのIO-Link デバイスが接続されているかは分かりません。IO-Link Device Description
(IODD)はシステムアーキテクチャを透過的に見せるために、あるいは IO-Link デバイスまで 設定できるように定義されています。IODD と ODD 翻訳ツールを使用すれば、ユーザーはど のIO-Link マスタのポートをどの IO-Link デバイスに接続に接続するかをコンフィギュレー ションできます。
5 IO-Link システム構成
5.1 The IO-Link デバイス
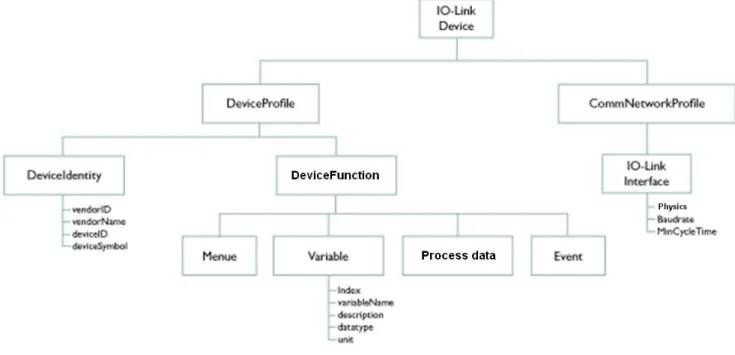
IO-Link プロトコルを使用することにより IO-Link デバイスのプロセスデータとデバイス機能 の変数へのアクセスが可能になります。機器を識別するためなどで、幾つかの変数は定義さ れています。機器メーカーは定義されたインデックスエリアでデバイス変数を構築します。 構築されたデバイス変数の情報はIODD に記載されます。 Figure 10: IO-Link デバイス構成5.2 IODD と翻訳ツール
IODD には通信プロパティ、デバイスパラメータ、識別データ、プロセス・診断データの情 報が含まれます。IODD はデバイスのイメージとメーカーのロゴも含みます。IODD の構成は 全てのデバイスとメーカーで共通になっており、IODD 翻訳ツールでは常に同じように表示 されます。したがって、メーカーに関係なく、すべてのIO-Link デバイスが同じように取り 扱いできることを保証しています。 IODD はパッケージとして配布され、デバイスを記載した1つまたは複数の xml ファイルと png フォーマットのイメージファイルで構成されます。“IODD-StandardDefinitions1.0.xml” ファイルには全てのデバイスの一般的な内容と必須なプロパティが記載されています。この ファイルはIODD ディレクトリでサポートされている各言語で一度格納されます。更に xml ファイルはデバイスのメーカー固有のプロパティも記載されています。 翻訳ツールはIODD を読込、(制限された範囲で)グラフィックなフォームに記載されたデ バイスを表示します。全てのメーカーのIO-Link デバイスのパラメータ化と診断に使用でき ます。同時にIODD 翻訳ツールにより、システムアーキテクチャをフィールドバスレベルま で透過的に拡張できます。IODD チェッカーは IODD を検証するために開発されました。全ての IODD は IODD チェッカ ーでテストされなければなりません。チェッカーはIODD にチェックサムを入力します。 IODD を読込んだ翻訳ツールも IODD に入力されたチェックサムと同じチェックサムを生成し ます。
5.3 IO-Link マスタ
IO-Link マスタは異なる方法で PLC にリンクでき(Figure1 参照)、1つまたは複数のポートを 持ちます。 IO-Link 仕様書ではポートを 2 つのタイプに区別しています。ポートタイプ A の 2 番ピンの 機能は詳細に記載されていません。メーカーが自由に定義できます。ポートタイプB では特 殊な電源が必要となります。 ポートタイプA このタイプでは、4 番ピンが DI または IO-Link としてコンフィギュレーションされます。メ ーカーは 4 番ピンを制限された出力電流での DO にも設計できます。2 番ピンも使用可能で、 メーカーは例えばDI または DO として設計できます。 Figure 12: IO-Link マスタ、ポートタイプ A ポートタイプB ポートタイプB は電源から絶縁されているセンサやアクチュエータ用にデザインされていま す。2 番ピンと 5 番ピンは追加電源のために使用できます。 . Figure 13: IO-Link マスタ、ポートタイプ B本説明書は
IOLink specification in brief
Version 1.0 , 12.11.2008
を日本プロフィバス協会が日本語に翻訳したものです。 日本語と原本の間に相違のあるときは原本を正とします。 特定非営利活動法人 日本プロフィバス協会 〒141-0022 東京都品川区東五反田 3-1-6 ウエストワールドビル 4F 電話・Fax (03)6450-3739URL: http://www.profibus.jp E-mail: [email protected]
2010 年 11 月発行