The Japanese Psychonomic Society
NII-Electronic Library Service The Japanese Psyohonomio Sooiety
7
’
he faPanese Journat o.
广Ps.
vchcmomic’
s(tience20D5
,
VoL 24,
No.
1,
100−
LO6講 演 論 文
身体 活
用
イ
ンタ
ー
フ ェイ
スパ ラ サ イ トヒュ
ー
マ ン の研究
一
前
田
太
郎
NTT
コ ミュ
ニ ケー
シ ョ ソ科 学 基 礎 研 究 所Human
body
use
interface
一
The
study ofparasitic
humanoid
一
Taro
MAEDA
NTT Communication Scienceムaboratories *
The Parasitic Humanoid (
PII
}is
a wearable robot for modeling of nonverbal human bchavior,
The
PIIcan
be
also one of the bcst mcdia as behaviく〕ral interface because the PH has theadvarltageof embodiment and adaptation
.
In this report,
we refcr to the usage of wearable robotics asbehavi〔,ral interface
.
Thc PH assists the wearer with not powerbut
behavioral indllction.
Thebehavioral inductic)n is
driven
by sensory stimulus synchronous to the behavior.
The stimuli aredesigned
tQinduce
entailment cyclic motions ほnconsciously and t〔〕c〔}rrect one−
sh〔}t motionsconsciQusly
.
Thc concept of PH is very effectivc asthe
design
phnosophyin
theinterface
that usesthe human body rcsources
,
Key
words :wearab !e,
nonverbalinterface
,
behavior,
induction,
hurnanoid.
1.
は じ めに 情 報 化 社 会が我々 の生 活に も た ら し た もの は,
.
・
見 す る と便 利さ・
快 適さを象 徴してい る.
し か し,
その実態 と して,
我々 はよ り多 くの情 報を流 し込ま れ,
よ り多く の半「」断・
応 答を強い られて いる.
結 局の ところ従 来の情 報 化 技 術は情 報の入り口を 広 げて判 断の 材.
料 を増や す ば か りで, その 判断 と実 行まで はサポー
トして は くれず,
増 加し た情 赧の量 とス ピー
ド にユー
ザー
の意 識や注 意へ の負 荷は増え る一
方である,
人が情 報を使う は ず が一
人 が情 報に使わ れ ている」時代.
結果と して現代人は忙し い.
最新の情 報機器 を増や す よ り,
も う・
っ 体が欲しい,
とは誰 し も が 思 うことで ある.
そ こ で 『分 身』の創り方 を.
考え た ときに,
まず 期 待され るのは近 年 注 目 を集める 人型ロ ボ ッ ト技術であ る が,
確 かに人間の生活空間に入 り込ん でその活動を支 援 する た めの試みは多 くなされて * NTTCommunicatien Science Laboratories
,
3−
1Morinosato
,
Wakanliya,
Atsugi
243−
0198いるもの の
,
想 定されている応 用は あくまで手足の延 長 と しての 機能であ る.
し か もユー
ザー
の手を煩わせ る こ と なくそ の行 動を支 援 する活 動がで きるか と いえ ば,
そ の段 階か らは ほど遠 く,
む しろ多くの 認識 。判 断と行 動 の選択はユー
ザー
の 負担と な る た め,
ロ ボ ッ トが人 間を 手伝う とい う よ りこれ ま た人 間がロ ボッ トを手伝っ て い る状 況が多いのが現 行 技 術の実 態であ ると嘗え る.
身 体 よ りも意 識へ の負 荷の大きい この 状 況で欲 しい 『分 身 」 とは,
面 倒 を 見な け れ ばい けな い1
・
や足で は な くて,
面 倒を分か ち合う 眼や頭の ほ う で ある.
全て とは言わ ない が,
定 番の判 断や定 番の行 動 を肩 代わ りしてこな して く れ る 眼 と 頭が あ れ ば,
意 識や 注 意 の 負 荷を ドげ たり,
もっ と他の必要なこ とに割け る ようにな る はずだ.
こ ん な 『分 身 』を創るには ど う し た ら良いだ ろう ? こ れ は『 分の行 動パ ター
ンの コ ピー
を ど う や っ て取る か とい う問 題に なっ てくる.
こ の た めのデバ イス と して我々 が提 案 す るの が身体行動を支 援 して く れる共 生 体とし て の ウェ ア ラブル ロ ボッ ト,
パ ラ サ イ ト ヒュー
マ ン (“
Parasitic
Humanoid=
PH’
りである.
Copyrigllt 2005
.
TheJ
とLparlese Psychonomic SQciety.
All rights reserved.
前田:身 体 活用 イン タ
ー
フ.
・
イス 101 験 鈿 轍岡 閣 崗 鴫 鰤 嫐 榊 覇 蝋 舳Figure 1
.
Composition
of PH and acquisition process ofbehavior
mode1,
近 年
,
計 算 機の小 型 化・
高 機 能 化に伴っ
てウェ ア ラ ブ ル コ ン ピュー
テ ィ ン グの研 究が開 始されて い る,
こ の 技 術 は 利 用 者に とっ
て携 帯 して い る とい う存在を気にせ ず に済む利 便 性は ある もの の,
そ の目的 意 識は通 常の 計 算 機 端 末を身にっ けて 持ち歩くと い うモ バ イル コ ンピJ一
テ ィ ング の域を脱して い ない.
こ の ため,
従来の文字・
映像とい っ た言語的情報を 入出力で き る ウェ ア ラブル デ バ イ スの開 発がそ の主流と な っ て い る,
し か し,
ウェ ア ラブルデバ イ ス の構 成は人 間の身 体 性に基づい た情報 を 扱う とい う観 点か ら見れば 本 来 的に最適な構成であ り,
この利 点を 生 か し た イン ター
フ ェ イ スを技 術を研 究・
開 発 することで,
従 来 的 な 言語 情 報に よらない身 体 性 を利 用 した非 言語 イ ンター
フェ
イス技術を 確立す るこ と がで き る.
この観点か ら ウェ
ア ラブル 技 術とロ ボテ ィ クスを 融 合さ せ た ウ ェ ア ラブル ロ ボ テ ィクスの試み が な さ れ始 め て い る.
しか し,
これ らの多 く はい ま だに パ ワー
ド スー
ッ に代 表さ れ る装 着 型 力 増 大シ ステ ム やVR
の 力 覚提示 系の ウ ェ ア ラブル化な どに端を発する ものが 主流 で あ り運 動 系・
力 覚 系に特 化 してい る.一
方で少 数なが ら感 覚 系の ロ ポ ティ クス と して主にモバ イル視 点か らの 外 界セ ンサ系によ る移 動ロ ボ ッ ト技 術を適 用 する試みな ど が な さ れて い るが,
いずれの研 究 も人 間に装 着 する た め の 工夫と い う要 素 技 術 的な 問 題解決の段 階に と ど まっ
てお り, 人間の 形態や機能を積 極 的に研究・
利 用 する と い う観 点に欠けて い た.
本 研 究で提 唱 する PH は ウ ェ ア ラブノレ技 術に よ っ て全身に装 着さ れ た セ ンサ群が,
装着 者の感 覚一
運 動 過 程に おいて装 着 者 自身と同一
一
視点か ら の計 測 を可能と す ることに着 目し,
これに軽量・
小 出 力 のア ク チュ
エー
タを 加 えることで人 間に装 着されたまま 安 全に稼 働 する人 間 類 似 型ロ ボ ッ トシ ス テムを構 成 する もので あ る.
PH は 人間の非 言 語 的(nonverbal )な知 覚一
行動モ デル を獲 得し、
これ を もっ て人 間の行 動を支 援 す ることを 目 的とする.
本 研 究の効果 と して は人 間 機 能の 工学 的解明とい う臼然科学的な基 礎 研 究に寄与 する側 面 に加 えて,
同技 術の 工 学 的応用と して, こ う した新しい 設 計 思 想に よる適 応 型.
マ ンマ シ ン インター
7」
.
イスと し て の利用の側 面 において 大 き な 成 果 と将 来 性が期 待され る.
2 .
パ ラ サ イ トヒュー
マ ンの実 装2.
1
パ ラ サ イ ト ヒュー
マ ンの構 成 概 念 本研究で提 唱する PH は ウ ェ ア ラ ブ ル コ ンピュー
テ ィ ングの技 術 を用いて製 作さ れ る,
オペ レー
タに着込 ま れ る形で装 着さ れ るその感 覚系は 運動 覚・
視 覚・
聴 覚・
触 覚 な ど,
人間のサ ブセ ッ トと なる知 覚 情 報を人 間と同 様 の次 元 数。
スケー
ル で外 界 情 報 を獲得し,
自ら動くこ と が で きな い代わ りに人 間 とい う機 能 単位の 入出 力に追随 してその入出 力 関 係を記 録・
学 習し,
これに適 応 した入 力・
行 動 要 求を もっ て,
装 着 者の行 動を補 完 するよ うな一
種の共 生 関 係を作り出 す.
これ は あ る種の 寄生 型の人1
/生命の よ う に作用す るシ ス テム であ る.
Figure
1左に その最 も単純な構 成 と なる第 1世 代 PH の概 念 図を示 す.
用い て い る実 装 技 術・
セ ンサ技術といっ
た各 要 素 技 術 自体は既 存の普及技 術であ り,
その 構成 自体は ご くシ ンプル な もの であ る.
同 装 置の狙い は同 次 元・
同スケー
ル の セ ンサ と効 果 器 を 持 ち,
同 構 造・
同 空 間 配 置か ら得 られ た情 報の 統 合機 能によっ て,
人間の情 報処 理 上の行 動 原理の第一
次近 似と しての モデルを得ることで あり,
人間の行動解析におい て,
シ ミュ レー
ショ ンや特 定 局 面 で の一
時 的な行 動 記 録では特 定しに くい環境との 複 雑な イン タ ラ クシ ョ ンを恃っ た取 得情報や対応 する行 動を,
装 着者と 同一
視点で常 時 計 測し続ける ことで,
人 間の身 体 的な構 造に起 因 するス キルや行 動ロ ジッ クを解析す る一
助とする.
こ のモ デル獲 得 過 程 をFigure
l右に 示す,
The Japanese Psychonomic Society
NII-Electronic Library Service The Japanese Psyohonomio Sooiety
102 基 礎 心理学研 究 第
24
巻 第 1 号 PH は人 間に装 着さ れ ること で人間と同相の感 覚 情 報と 連 動 情 報 を 得るこ と がで き,
こ の情 報を元に以 下の 2っ の 段 階 を 経 て人間の行 動モ デル を獲 得する こ と を目 指 す.
1} PH が内 部に持っ 行動モ デル が 学 習前の状態の 場 合,
直前まで の感 覚一
行 動 履 歴と現 在 状 態か らモ デル を用いて次の行 動を予 測し,
そ の正 誤に基づ い て 内部モ デル の修正 を繰り返す (Flgure 1右 実 線 ).
こ の段 階のPH
は受 動的に情 報を 観測 し予 測 と修 正 を繰り返 す.
2
)上記 予 測モ デル が ト分な予 測 性 を持っ に至っ た時 点で,
PH は そ のr
・
測に外れ た装 着者の運動に対 して直 接 的に自 分の 運 動 出 力 を もっ
て異を 唱え る こ と を始め る(Figure
l右 点 線 ).
こ の とき,
装 着 者がそ の出力を妥 当だ と判 断 すれ ば そ れに従い,
そ うで ないとすれば行 動を修正 しない.
こ の 新た な行 動 結 果を も とにPH
も ま た内 部モ デ ルの修 正 の有 無 を決定 する.
こう して人 間とPH 双 方に お い て行 動の内 部モ デル を修 正・
整理すること を繰 り返 す 共 生 系 を 確 立 する,
同 段 階におい て PH と 装 着者の 間に は あ る種の非 言語コ ミュ = ケー
シ ョ ンが確立 さ れ ること に なり,
装 着 者が この共 生 的 なプ ロ セ ス に馴 染ん で い くこ と に よっ
て PH によ る行 動 攴援の様 式が身体学 習 的に獲 得さ れて い く こ とにな る,
2.
2 運動 誘 導によ る行 動 支 援イ ンター
7 エ イス こ の段 階で鍵と な るのが 運 動 誘 導に よ る行 動支援とい う考’
え方で あ る.
従 来,
「人 間の 行 動を決 定する要 因は当 人の 自由 意 志に よ る もの でありこ の変 更は個々 の人 格の 意 志決定・
判 断によっ て のみ可 能で ある 」とい う思 想が 主流である.
しか しな が らこ の結果, 先述 し た よ う な意 識へ の判 断 負 荷 を 過剰に して し ま う形でイ ンター
フ ェ イ ス技 術が発展 す る とい う結 果を招い たとい え る.
これ に 対して心 理物理学の近 年の知 見に よ れ ば,
実際の人 間の 情 報 処理系において知 覚か ら行 動に至る情報処 理の プ ロ セ ス の 中で は,
意 識 上の 言語的な判 断 処理 を要 求さ れ る デー
タフ ロー
以上に,
意 識.
ドにおい て半 自動 的に非 言語 的な情 報が処理される デー
タフ ロー
が大き な 役 割 を 果 た し て い る こ と が示唆さ れて い る.
強 制 的な意 志や行 動へ の介 人では な く,
感覚 入力に働き か け るこ とに よっ て,
この 意識 ドで機 能する処理系を介して利用.
者の行 動を自 然に誘 導 することを 狙 うのが運 動 誘 導の考え方で あ る,
PH は身 体 性 を 利用 し た計測 とモ デル 化を行うことで そ の情 報を兀 に こう し た非 言語 的な装 着 者の行 動 を 予 測 し 誘 導す る行 動 支 援イン ター
フェ イス として機 能 する.
従 来,
ウ ェ ア ラ ブルコ ン ピュー
ティ ン グの観 点からの行 動 支 援イ ンター
フェ
イス は小型 HMD や音 声 指 示を 用い た 言 語 的〔verball な于段に限られて お り, 人 間の言語 理解 を介して い る点で,
身 体 行 動 を実 行 中の装 着 者に とっ
て は注 意を分 散 する負担が大きい上 に,
装 着 型の利 点で あ る身体性 を 全く と いっ てよいほ ど利 用 して いな かっ た.
PH
で は身体 性を利 用した運 動 誘 導の考え方によっ て,
nonverbal で よ り直 観的な行 動攴援イ ンター
フ ェ イス と して 機 能 すること が 可能で ある,
運動誘導は機 能 的 電 気 刺 激 (FES )な ど に代表さ れ る よ う な運 動 目体へ の直 接 介 入で は な く
,
感 覚に対す る誘 導 刺 激の付 与に よ る感覚一
運動サ イ クルへ の干 渉をそ の 基 礎とする.
その 形態 は意 識へ の関 与の仕 方によっ て,
以下の2
つ に分 類さ れ る,
1) 歩 行や船 漕ぎ,
指 揮 動 作な ど,
反復する周 期 運 動 において は意 識 下 刺激を利用し た運 動 誘 導が有 効 であ る,一
般に長 時 間 継 続 する運 動は こうし た周 期 運 動が主 体で ある.
これは同時に他の 動作や活 動を並 行 して 行うこ とが 必 要と さ れ る動 作が多 く,
こ の た め運 動 自 体 に は 意識 的に注意を割く こ と な く その反 復 運 動を行 使し続 けら れ ること が必 須である.
こ の場 合,
誘 導 刺 激も ま た 注 意 を ひ く こ と なくこ の感覚一
運 動プ ロ セス に作 用 するこ と が要 求さ れ る.
このため,
継 続 的な周 期 刺 激に よ る 引 き 込 み な ど を用い た半 無 意 識 的な運動誘導手 段がこの 適 用とな る.
また,
こ の場 合に期 待さ れ る効 果は誘 導 開 始によ る即 時 的な もの で は なく次 周 期以降に位相や周 期の変 化 を実 現 する とい うの が誘 導 戦 略と なる,
2)一
方,
周 期 運 動に対し て リー
チ ングに代 表 さ れ る 単 発の運 動に おい ては,
連動 臼体が短 時 間の う ち に終 了 する た め,
こ の場 合の誘 導は動 作 終∫直 後 か動 作 中に効 果を現 す 即 時 的な もの で あ る 必要が ある.
また,
動 作 毛の注 意 も主と して その単 発 運 動 臼体に向け られてい るた め に,
対応体 部 位に関 す る意 識上へ の運 動 教 示がそ の適用 と な る.
2.
3
パ ラサ イ ト ヒュー
マ ン の各 部 構 成 PH は全身に装 着されて 機能す るセ ンサ系と運 動 誘 導 刺 激 系 を待 ち,
これ ら が そ れ ぞ れ人間の感 覚 系・
運 動 系 に相 当 する よ うに構成さ れる.
こ の試 作3 弓機 と そ の各 部 構 成をFigure 2 に示 す.
これら装 着 装置 系の総重 量 は計算 機とバ ッ テ リを 除けば 中継 基 板や 配線を含めて も 500g 以下の 構成 と なっ て い る.
これ らの デバ イ ス は ウェ ア ラブル な実装のた めに小 型 軽 量 化 を 図るだけ で は な く,
身体性にー つい た PH 特 有の要 素デバ イスがい く N工 工一
Eleotronio Librarygti
il
mSi・Ptst,CMI-S-7.Ix
103ww
,lli ,eeyme'g r'waua----mmmu
ill# ,llil
-.ngeve
Wtb
gep
ew
eg'fims,eeT-73gi-eql
ss.,.,/j'rlpspa
gev"/t {gthl"lptassbwa,
v,gete,ge/,,gIM,dyss,
;'k/
iiskl,,
,, iilil{ess
・tew. I,l Figure 2ge
mel'Fv, .sctwll: .ww:-lii,,,lilf,,,,l ilag ,$Xi llI,liliIi
,,ii'eeum
,ww isileq
The Japanese Psychonomic Society
NII-Electronic Library Service The Japanese Psyohonomio Sooiety
104 基 礎 心 理学 研究 第 24 巻 第 1号 っ も提 案
・
開 発さ れてい る.
以 ドに その構 成 上,
特に特 徴 的な デバ イス の実 装にっ い て説明 す る,
2,
3.
1 爪 センサ に よ る 指 行 動の計 測PH
におい て採 用さ れ た爪セ ン サ は装 着 者の手 掌 部の 活 動を妨げる ことな く計 測を行うた めに 開発さ れ た セ ン サ で あ る.
そ の特徴は セ ンサ が指の腹 側に一
切 存 在せ ず,
全て爪の上に装着さ れてい る点にある (Figure
2右 側 ヒ2列 目).
原理的に は指 先 端の接 触や指の屈 曲に伴 う爪の色の分 布と変 化 を 爪 上か ら光 計測 す るもの であ り,
これは爪 直 下の血 行の分布を討’
測 して い ることに相 当する.
こ の構 成によっ
て装 着 者はセ ンサ の存 在 を 意 識 する こと なく通 常の行 動スキル に よっ て手 掌 部 動 作 を 行 うこ と がで き る.
現段階で は ICA に よ る 解 析の結 果,
指1
本あ た り3
組の フォ ト リフ レク タ を配し た状態で,
簡 単な キ ャ リブレー
シ ョ ン の み で指 先 端で の 3軸 接 触 力 ベ ク トル および 指の曲げ角に関し て3〜
4bit 程度の 有 効 分 解 能が得ら れ てい る.
2.
32 意識上 運 動 誘 導デバ イ スニ回転モー
メ ン ト型 提 m デバ イス PH に お ける運 動 誘 導の ための感 覚入力と して は,
そ の 開 発 段 階におい て 当’
,
振動モー
タ,
腱 反 射 利 用,
回 転 モー
メ ン ト提 示,
電 気 刺 激な どの各 種 感 覚へ の刺 激 方 法 を試み て い る.
Figure 2 に示 し た PH 試作 3 弓機の 実 装で は,
電気 刺激と 回転モー
メ ン ト刺 激を併 用 して い る.
回転モー
メ ン ト刺激の必要 性は,
装 着 者 臼身の セ ン サ & ア ク チ ュ エー
タ である筋へ の弱 電 気 刺 激は最 も軽 量 かっ 高 効 率 な刺 激 法で はあるもの の装着毎 時の キ ャ リ ブ レー
シ ョ ン負 荷 が 高 く、
ま た表面 電極による電気 刺 激で は筋の全て に対 して任 意に刺 激 可能なわ けで はない こ と,
装 着 者の 意 識L
において は,
個 別の筋の 活 動は表 象Figure 3
,
Wearable moment display device.
と して捉 え ら れて い ない ことに起 因 す る
.
そ こ で併 用さ れ る刺 激方法と して開 発さ れ たのが回 転モー
メ ン トに よ る運 動 方向 提 示デバ イス で ある,
こ の デバ イスは 目由な 身 体 活 動を保証 する た め に, 従 米 型の パ ワー
ア シ ス トや 力覚 提示デバ イスで問題 と なっ た外 部 固 定 点や反 作 用 点 な しの純 粋な トル ク提 示を可 能と し て い る.
その 原 理は 回 転 するホ イー
ル に蓄 積さ れ た角運動量 をブレー
キ機構 に よっ て装 瞽フ レー
ムに伝達 する ことに よっ て任 意の方 向・
強 度・
タ イ ミング を もっ
た イン パ ル ス状の教 示 トル クを発 生させ る方 式にある,
Figure3
に同デバ イス試作 2号 機を示 す.
こ の装置において は合成 ト ル クの最 大値 を3
「kgf−
cm ]と し た場 合,
有 効な提 示 角 度 分 解 能と し て約20
度,
す な わ ち4bit程 度が確 保さ れて い る.
2.
3.
3 意 識下運 動 誘 導デバ イス:前庭 感 覚刺激 前 庭 感 覚 刺 激に よ る方向 誘 導の手法はVR
にお ける 加 速 度 感覚提 示な どへ の応 用も含めて広い 応 用範 開が期舞
1
擁
い
,
蝋 蜘〜
广ノ
濃 /へ
噂一
ゼ 識 〆罐
巳
ポ
罫ー
軍
窘巳
,
垂 繃 贈 績 鷽覊
鯊
欝
黙
喚
ぐ
疆、
語、
曝 漏一
一
亠一・
…
晶・
一
一島
。
誌
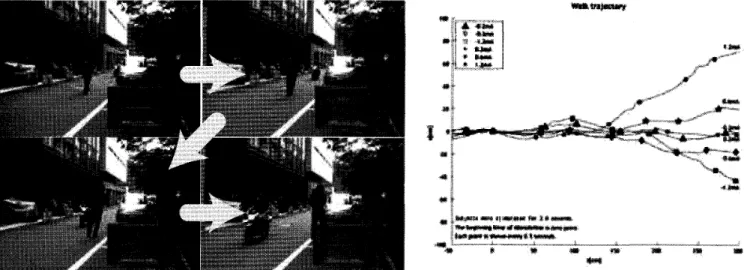
Figure 4
.
Walking
indugementtrajectories(
ToP
View
){Right
).
嚇 鉾 1瞳 羅 灘 馴霞 鯛
ww.
nvnvML
.
.
ー
ww.
.
.
t
購 齢experinlent (LefU
by
galvanic vestibular stimulation and walking前 田: 身 体活 用イ ン ダ
ー
フェ
イス 105SOM Layer Connections Around Cell i
lまpm
ピ
・
・
.
・
r・
W・
wu・
u・
’
r−’
1幽
瞞
纏
。_ 輛 繭 繭副
…い 噌
驫 冴1r tet
一
雛tt
・
tt
…一
・
・
一
韈…一
x雛一一一
撫 1蚕
i
”
Y
・ll 1
鱗
・
、
1
t.
一旧
一
一
一一ttww
糟
li l 黼 難 鼻ぎ…’
m’
冂
”
1…
’
’
”
“
mmlm
… ’
T’
磯 率 tS/
v
越
曙
“
鞭 舐鰤
コ
’
1’
m’
”
tn
’
Tt
’
’
’
’
”
pm
’
LT
−’
w−一
一
一
丁
「
「
”
v”
t’
wu …唖
」韈 冬欄 伽广
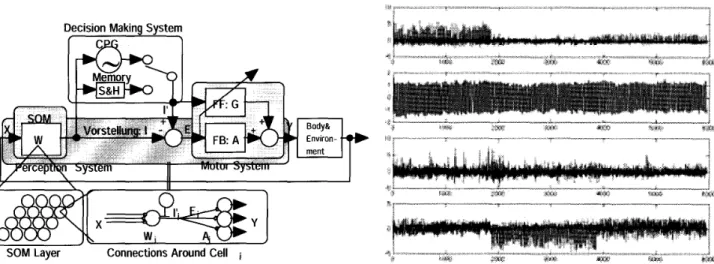
規 燗 郷Figure
5.
The
diagram
〔〕f
sensory−
motion system 〔Left
)and the example of pattern recognition with ICA
in
theJangken
task (Right
).
Figure
6.
Examples
of supportinghuman
bchavior
w {thPH
:Capture
&playback of training acti 〔〕n 〔Left)and walking inducement (Right)
.
待さ れ る刺激 方 法で あ る
.
左 右 両 耳 後に装 着し た電 極を 介 して数 mA 程度の直流 電流を 流 す (Figure
2中4段 目中 央 )ことに より,
装 着 者の感 じて いる重 力方 向を電 流 値に応 じて陽 極 側へ とシ フ トさせ る効 果が生 じる.
こ れ を利 用して, Figure 4の よ うに歩 行 移 動 中の装 着 者の 歩 行を/「:右に誘 導す ること が可 能で あ ること を被験 者を 用い た実 験に よ り確 認し て い る.
2.
4
感 覚一
運 動モ デ ル の獲 得と行動支 援の た め の行動 予 測 以L
のよ う な 運 動誘 導を有 効に行うた めに は,
装着 者 の行 動を同 定し,
予 測 する感 覚一
運 動プ ロ セ スの モ デ ル が必須で あ る.
PH
で はこ の モデル化において観測・
学 習・
誘導に身体性を利用し たウェ
ア ラ ブル シ ステムな ら で は の利 点が 生 か さ れ る.
行 動 情 報か らの学 習・
分 類を 行う1
司シス テ ムの構 成に は Figure 5左の よ う に SOM (自己 組 織 化マ ッ ピング) をは じめ と し た神経回路モ デ ル が概 念 上用い ら れて い る が,
実際の デー
タの処理に は 神 経 回 路 網モデル の等 価 的な線 形 近 似 解と して ICA (独 立 成 分 分 析 ) を 用い て学 習の安 定 性と近 似 精 度の トレー
ド オ フを 図っ て いる.
ジャ ンケン動 作を用い た評 価 実 験 (Figure5
右 参 照.
]寺系歹「」左 か らチ ョ キ・
グー・
バー
各 60 回 分に対 応 )におい て は,
肘 角 度+手の甲の姿 勢3
自 由 度の合 計4 関節 軸の情 報か ら,
特 定 装 着 者の 出し手動 作に関して,
平 均所要 時間0.
3
[s]の全行 程中,
1/3
行 程 段階で 85%,
2/3行 程 段 階で 95%の確 率で,
出し1
・
の リ ア ル タ イム予 沮i」に成 功して い る.
PH で は予測に よっ て 稼 ぎ 出さ れ る猶 予 時 間 (こ のケー
スで は100〜200
[ms ]) を 用い て ヒ トの 応答遅 延時 間 (動 作ご とに違う が お お む ね 150〜300
[ms ]程 度 ) を補 償 する ことで,
運 動 誘 導に よ る教 示を実 動 作の修 正に利用する戦 略 をとっ て い る.
The Japanese Psychonomic Society
NII-Electronic Library Service The Japanese Psyohonomio Sooiety
106 基礎心理学 研究 第
24
巻 第 1号
Table
lComposition
c)f
sensor systemin
the
third
prototype QfPH
セ ンサ種 別 検 出情報 検 出信 号 数 3 軸方向セ ンサ 爪 上部セ ンサ 眼 球運動セ ンサ 足 裏 圧 力セ ンサ 視 聴 覚セ ンサ 頭 部 ]
,
胴 部 3,
各四肢3
ヵ所 各 手 3 指の曲 げ&接触 点の検 出 各眼球 2LI 由度十瞳 孔 径 検 出 各足 5点 計 測+衝 撃セ ンサ 1 両眼カメ ラ十両 耳マ イ ク 16×3一
48 3×3×2=
183
×2=66
×2=
]2
2
画 像+2 音響3.
お わ り に 身 体 性を利 用し たウェ ア ラブル技 術 とし てのPH
の開 発理念と現 状にっ い て報告した.
行 動支 援インター
フェ
イ スと して の pH 利 用の端 的な具 体 例と して は以 下の よ う な もの が考え ら れ る.
0
歩 行 誘 導:最 適な歩 行 経 路を た ど る よ うに ガ イ ド する,
未 知ポ イン トへ のGPS
情 報に よ る経 路の 誘導 や,
交通情 報によ る混 雑 する経 路の 目 動 回 避,
後 方セ ン サ によっ
て検 出された接 近 中の 亀の 自動 同 避な ど,
前 庭 感 覚 刺 激 を用い た半無 意 識誘 導に よ っ て特に注意を 払 う 必 要 も な く最適 な歩行経 路を た ど るこ と がで き る (Figure 6右 )
.
2> 行動のキャ プ チャ & プ レ イバ ッ ク:行動の記録。
再生に よ る特 定 行 動の再利用.
例え ば偶然に打て たベ ス トシ ョ ッ トの 再 生に よ る繰 り返しトレー
ニ ング.
スポー
ツや ダン スな どの身 体 行 動の 「型1
の 交 換に よ る コ ミュ ニ ケー
シ ョ ン等 (タ.
イガー
ウッ ズのス イン グ,
イチロー
の 走 行フ ォー
ムの ダ ウ ン ロー
ドな ど)(Figure
6左 ).
こう し た直 接 的に身 体 性を介し た行 動 支 援 を 通して常 時装着と装 着 者 個 人へ の適 応を実現 する こ とで,
PH は 装 着 者に とっ て の補 助 意 識と して機能す る 理 想の イン タ フェ イ ス の一
形 態を 示峻 して い る,
今 後の課 題とし て は,
現 段 階の 試作 装 概で確保さ れた時 間 的・
強 度 的に は 高 分 解 能で あ る一
方で空 間 分 解 能 と して は4
bit
程 度の 教示方 式に よっ て どの程度の 運 動 予 測・
誘導 及び,
行動 の詑 録・
再生が可 能と な る かの実 証 例の蓄 積と,
複 数の 装 着.
者に よ る常 時 装着 実 験に よ っ て PH を介 した装着者 間の行 動情 報の 共 有の μ∫能 性,
装 着 者 間の 非 言 語的コ ミュ ニ ケー
シ ョ ンな どにっ い て も検 証 して い く予 定であ る.
引 用 文 献Jacobsen
,
S.2001
Wearablc Energctically Auton 〔〕−
mous Robots:DARPA
Exoske
!etonsfor
Human
Pcr『ormance Kick
Off
Meeting.
Mayol
,
W.
W .
,
T〔〕rdQff,
B.
,
& Murray,
D.
W.
2000
Wearable
Visual
Robots,
International
SympQsiumon
XVearable
Cornputing,
渡 邊淳司・
安藤英 由樹・
前田太 郎 2001 腕部 と 脚部の 相 関に着 目した歩 行 運 動の解 桁 計 測 臼動 制 御 学 会第 16 回生体・
生 理⊥ 学シ ンポ ジ ウム 論 文集,
419−
420.
財 津 義 貴・
稲 見 昌 彦・
前 田 太 郎・
舘 障 2001 腱 反 射 を 利 用し た新た な運 動 方 向 提示装置の提 案 VRSJ 論 文 誌,
6,
99−
105.
尾 花 和 俊・
安 藤 英由樹・
前田太 郎・
川 ヒ直 樹・
舘障
2002
回転モー
メ ン トを利 用し た機 械ブ レー
キ式力覚 提 示 装 置の 開 発 人工 現 実 感 (第 18回 ヒュー
マ ン イ ン タフ ェー
ス学 会 研 究 会),61−66,
Macda
,
T.
,
Ando,
H.
,
Sugimot
〔〕,
M.
,
Watanabe,
J.
,
&Miki
,
T、
2002Wearable
Robotics as a BehavioralInterface
− The
Study
Qf the Parasitic Hurnanoid−
,
Interrlational Symposiurn on Wcarable CoInput
−
1ng
,
Sevcrac
Cauqull,
A.
,
Martincz,
P.
,Ouaknine,
M .
,
&Tardy
−
Gervet,
M.
F,
20000rientation of the bodyresponse to galvanic st
.
iInulation
as a function ofthc intcr
−
vestibularimbalance.
F.
xp,
Brain Res.
,
133(4)