1.
海中はロボットの世界
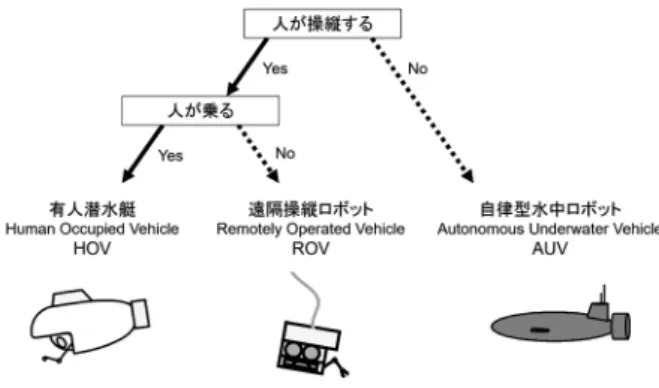
呼吸の困難,大きな水圧,暗闇……人間のアクセスを 拒む海中世界であるが,逆にこのためにロボットの重要 性が高いといえる.人が直接行くことのできない海中を 探査するために,海中ロボット(海中探査機,海中ドロー ン)は必要不可欠なプラットフォームである.本稿で はまず海中ロボットの概要を紹介し,次にケーブルなし で全自動で行動する自律型海中ロボット(Autonomous Underwater Vehicle:AUV)について紹介する.後半 では著者の研究室における開発事例を紹介する. 1・1 海 中 ロ ボ ッ ト 海中ロボットには,図 1 のように人が乗り込んで 直 接 操 縦 す る 有 人 潜 水 艇(HOV:Human Occupied Vehicle),ケーブルを介して人が操縦する遠隔操縦ロ ボット(ROV:Remotely Operated Vehicle),そして 人が操作せずに全自動で行動する自律型海中ロボット (AUV:Autonomous Underwater Vehicle)の 3 種類が ある.HOV は人が直接海中に行けるという利点がある が,人が乗るために大型になることと厳重な安全対策が 求められることから,運用コストが大きい.このため, 運用者は大規模な研究機関や資源開発企業などに限られ ている.ROV はテザーケーブルを介して人が操縦する タイプであり,HOV よりは手軽でありながら,人が操 縦するため複雑な作業も可能である.深海まで行ける大 型のものから,クレーンなしで運用できる小型のものま でさまざまな種類があり,3 種類のロボットの中で最も 普及しているタイプである.ちなみに最近話題の「海中 ドローン」は小型 ROV に該当するものが多い.AUV は 人が操縦せずに全自動で行動するロボットである.テ ザーケーブルが不要であるため行動範囲の制限を受け ず,また波や流れの影響を受けずに安定した観測ができ る.ケーブルのハンドリング装置や操縦室といった支援 設備も最小限で済むため,ROV よりも運用コストが小 さい.人間の指示を受けずに全自動で行動できるため, 母船なしでの運用や複数同時運用による効率化などのポ テンシャルを秘めている. 3種類のロボットはそれぞれ得意なことが違うため, 用途に応じて使い分けられる.簡単な作業の場合,例え ば水温を測りたい場合は船から温度計をつり下げるだけ ですむため,ロボットを使うまでもない.一方で,海底 の写真撮影やサンプリング(岩石や生物などを採ってく ること)など,海底近くまで接近する必要がある場合, HOVや ROV の出番である.海底の掘削やケーブルの敷 設など,大パワーを要する作業の場合はケーブル経由で パワーを供給できる ROV に分がある.AUV は全自動で 活動するため観測効率は良いものの,トラブル対応も含 めて人間の支援なしでこなす必要があるため,その用途 は今のところ水質調査や音響による地形探査など,比較 的簡単な作業に限られている. 1・2 AUV AUVの歴史は意外と古く,1959 年に米国のワシント自律型海中ロボット
─魚のごとく─
Autonomous Underwater Vehicle
─ Like a Fish ─
巻 俊宏
東京大学生産技術研究所Toshihiro Maki Institute of Industrial Science, The University of Tokyo.
[email protected], http://makilab.iis.u-tokyo.ac.jp/
Keywords:
autonomous underwater vehicle, seafloor observation, navigation. 「空間移動自動運転技術」ン大学において,北極海観測用に提案されたのが始まり といわれている [Widditsch 73].当初は大学を中心とす る小規模な開発が中心であったが,コンピュータや電池 など周辺技術の発展を背景にその実用化が見えてくる と,軍や石油関連企業による大規模な開発が始まった. そして 2000 年代には AUV メーカと呼ばれる企業も複 数登場し,普及,多様化の時代を迎えた. AUVは,図 2 に示すようにクルーズ型,ホバリング型, グライダー型の 3 種類に分類される.クルーズ型は魚雷 のような形状であり,推進効率に優れている.現在最も 普及しているタイプである.ホバリング型はその場停止 (ホバリング),垂直移動,その場旋回など複雑な運動が できるタイプであり,ピンポイントの詳細観測に向いて いる.クルーズ型を飛行機とするならばホバリング型は ヘリコプタである.グライダー型は消費電力を極力抑え, 運用時間と航続距離を最大化したタイプである.移動時 に上下動を繰り返す必要があるため用途は限られるが, 数か月,数千 km といった長期運用が可能である. AUVは図 3 のように,頭脳,観測機器,エネルギー 源,測位・航法機器,推進器,通信機器,回収支援機器 から構成される.以下順に説明する.頭脳はコンピュー タであり,ここで自律行動を行うためのプログラムが実 行される.あらかじめ指定したルートを るような簡単 なミッションの場合,あまり高度な計算能力は必要とさ れない.むしろ信頼性が重視される.観測機器は水質セ ンサから各種ソナー,カメラなど,観測目的に応じてさ まざまなものが存在する.エネルギー源はリチウムイオ ン電池が主流であるが,一次電池や燃料電池を搭載した 例もある. 海中では電波がほとんど使えないため GPS は利用で きず,周囲も真っ暗,照明を使ってもマリンスノーなど の影響で遠くまで見通すことはできない.このような環 境で自分の位置や周囲の状況を知るためのセンサが測 位・航法機器である.姿勢(ロール角,ピッチ角)センサ, 深度センサは小型かつ低コストであるためほぼすべて の AUV に搭載されている.高級機においては,真方位 を計測する 3 軸のジャイロ,対地速度を計測するドップ ラー式対地速度計(DVL:Doppler Velocity Log),複数 の慣性センサと他のセンサから自己位置を確率的に推定 する慣性航法装置(INS:Inertial Navigation System) などが搭載される.また,船上から海中の AUV の位置 を測るため,外部からの音響信号に対して応答する装置 (トランスポンダ)を備えることが多い.障害物探知用 のセンサとしては,各種ソナーのほか,近距離用として カメラやレーザが使われることもある.推進器としては もっぱら電動スラスタが使われる.ホバリング型 AUV は高い移動自由度を獲得するために複数のスラスタを備 えている.クルーズ型 AUV のスラスタは通常 1 台のみ だが,首振り式のスラスタや可動翼により進路変更がで きるようにしている.AUV は全自動とはいえ,外部か ら状態を監視したり,あるいは天候急変などの理由によ りミッションを中断させるため,船上との双方向通信装 置を備えていることが多い.海中では電波の減衰が大き いため,無線通信にはもっぱら超音波が使われる.周波 数帯域にもよるが,最大で 10 km 程度の距離で通信で きる.データレートは電波に比べると非常に低い. 図 3 AUV の構成要素 [巻 18a] 図 2 AUV の分類 [巻 18a]
テザーケーブルがないことは AUV の利点である一方 で,トラブル発生時にはロストの危険性を高めてしまう. そこで水中あるいは浮上している AUV を発見するため の機器が搭載される.浮上時に電波を発するラジオビー コン,衛星経由で自己位置を教えるイリジウムビーコン, 光を発するフラッシャ,水中で音響信号を発する ROV ホーマやピンガなどである. AUVは全自動をうたっているものの,現状では準備 から展開,回収に至るすべてのフェーズにおいて人間 の介入が欠かせず,母船も常に拘束される.AUV を一 度海に投入してしまえば限られた情報しか上がってこ ず,またケーブルもないため,異常があってもすぐに回 収することはできない.したがって投入前の準備が非常 に重要である.ハードウェアの状態や各種センサの動作 チェックはもちろん,事前に与えているウェイポイント や浮上時刻,海底からの高度といった各種パラメータも 入念にチェックされる.投入後は母船で追尾しつつ,音 響モデムや音響測位装置によって AUV の状態や位置を モニタリングする.そして必要に応じて音響コマンドを 送り,観測ルートの変更や緊急浮上などの指示を行う. 近年,自律ボート(ASV:Autonomous Surface Vessel) 経由で AUV との通信ができるようになり,母船は離れ た場所で同時に別の仕事ができるようになりつつある. 無事 AUV を回収できたら,内部に保存されている膨大 な観測データの回収,電池の充電などが行われる. 1・3 AUV のソフトウェア 海中だけでなく,陸上や空中であっても一般に自律 移動ロボットのプログラムに求められる機能を一言で表 すならば,センサからの入力をもとにアクチュエータの 出力を決めることである.水中において特に難しいこと は,センサの能力が限られること,および人間による介 入が難しいことである.このため,センサの入力から自 己の置かれた状況や周辺環境を認識する,状態推定,自 己位置推定,周辺環境認識といった機能が重要になる. 個々のセンサの信頼性が低いため,例えば音響と画像, 慣性などの複数のセンサを組み合わせるセンサフュー ジョン,確率的な状態推定手法などが採用される.あ らかじめ海底地形マップをもたせておき,センサによ る計測結果と比較することで自己位置を求める Terrain Navigationや,センサの情報から環境マップと自己位 置推定を同時に行う SLAM など,さまざまなアプロー チがなされている [巻 15].センサデータの認識に機械 学習アルゴリズムの導入も提案されているが,陸上と比 べて利用できるデータ量が少ないことが課題である. 推定された状態をもとに,そのときどきに応じて最適 な行動をとるための運動制御部分も当然ながら欠かすこ とができない.人間が事前に指定した経路を る,ウェ イポイントトレースと呼ばれる制御が基本であるが,近 年は観測結果をリアルタイムに解析して行動パターンを 切り替えるアプローチも提案されている.さらに魚のよ うに自由に泳ぎ回るためには,周囲環境および最適な行 動について自ら学習する機能が求められよう.早期の例 として,藤井らはクルーズ型 AUV の深度制御手法とし てニューラルネットワークを採用している [藤井 89]. 人間の介入が難しいため,万一のトラブル発生時も 安全に帰還できるよう,異常検知機能が重要である.あ らかじめ人間が指定した条件判定を組み合わせること が主流だが,機械学習アルゴリズムの応用事例もある [Raanan 18]. AUVの自律行動は一般に,空気中において自律制御 開始コマンドを受信した瞬間より始まり,潜航して所定 のミッションを達成し,浮上するまでの一連の動作から なる.各段階によって求められる行動パターンや目標が 異なるため,AUV のソフトウェアはステートマシンと して実装されることが多い.図 4 に例としてホバリング 型 AUV Tri-Dog 1 の自律行動プログラムのモード遷移 を示す.最初のモードは一定時間待つだけである(Mode 10).この間にオペレータは無線接続を切ったり,クレー ンのフックを切り離すなど AUV を潜航できる状態にす る.その後,指定された潜航開始地点まで GPS によっ て水面を移動し(Mode 15),潜航を開始する.潜航時も Mode20, 30, 40と 3 段階に分かれているが,これには理 由がある.海底画像観測を行う場合,高品質な撮影を行 うために海底まで数メートルの距離を維持することが望 ましい.したがって,鉛直方向の制御リファレンスは高 度とするべきであるが,高度センサは超音波の反射計測 によるため,ある程度海底に近づかないと計測できない. 一方で深度は圧力センサによって常に信頼性の高い計測 が可能であるため,最初は深度をリファレンスとして降 下し(Mode 30),海底に十分接近した段階で高度をリ ファレンスとする(Mode 40).そして目標高度に到達 したら,海底画像観測を開始する(Mode 50, 60).本機 の行動アルゴリズムの詳細については [巻 08] を参照さ れたい.予定した観測をすべて終了するか,あるいは何 図 4 AUV Tri-Dog 1 の自律行動プログラムのモード遷移 (海底画像観測ミッションの例)[巻 08]
らかの異常を検知した場合,浮上する(Mode 90).水 面に近づいたらすべての制御を切り,水面に浮遊した状 態でオペレータからの接続を待つ(Mode 100).
2.AUV Tri-TON 2
ここからは東京大学生産技術研究所巻研究室における AUVの研究開発事例を紹介する. Tri-TON2(トライトン 2)は,最大 2 000 m まで潜 航できるホバリング型 AUV であり,2013 年に進水した [Maki 14].本機のミッションは,海底熱水地帯のよう な複雑な海底環境を漏れなく画像マッピングすることで ある.このため,カメラとシートレーザ(線を投影する レーザ),フラッシュからなる撮影装置を前方と下方に それぞれ搭載している.また,超音波により海底ステー ションを基準とした自己位置推定を行う機能ももってい る.本機の全長は 1.4 m,空中重量は約 300 kg である. 図 5 のように 3 本の圧力容器から構成されており,上 の 1 本には計算機や各種センサ類,下の 2 本にはバッテ リが収納されている.計 5 台のスラスタにより,サージ (前後移動),スウェイ(左右移動),ヒーブ(上下移動), ヨー(旋回)の 4 自由度を独立して制御できる.ALOC (Acoustic Localization and Communication)という音 響測位通信装置および Particle Filter という確率的状態 推定アルゴリズムによって,海底ステーションからおよ そ半径 300 m 以内において安定したリアルタイム自己 位置推定が可能であり,これにより画像マッピングなど の詳細な海底観測を行うことができる.観測装置として は,カメラ,フラッシュ,シートレーザを下方および前 方に向けてそれぞれ備えており,これらによって海底だ けでなく熱水チムニー(火山活動によって海底から噴出 する熱水がつくり出す煙突状の地形)のような立体物の 側面も 3D 画像マッピングをすることができる. 2014年に鹿児島湾たぎり噴気帯へ展開した結果を図 6,図 7 に示す.図 6 に描かれた線は Tri-TON 2 が観測 中に推定した自身の航跡である.海底ステーションを 基準とする相対座標系であることに注意されたい.Tri-TON 2は黒丸地点で海底に到着後,あらかじめ設置さ れていた海底ステーション(星印)を直ちに発見し,あ らかじめ指定されたルートをたどりながら,海底から高 度 1.7 m を保ちつつ画像観測を行った.図 7 はこの潜航 によって得られた海底の三次元画像マップである.この 地域固有の生物であるサツマハオリムシ(Tube worm) のコロニーの分布が捉えられている. 図 8 は 2015 年に同海域で行われた潜航結果より, 後処理で再推定された Tri-TON 2 の測位結果である. ALOCによって計測されたステーションとの距離が,ス テーションを中心とする円で示されている.また,同様 に ALOC で計測された,AUV から見たステーションの 方向が AUV から伸びる半直線で表されている.このほ かにステーションから見た AUV の方向の計測値も用い て,これらの計測値が最も矛盾なく合致するように自己 位置推定が行われる.青線で示された推定航跡上に一定 間隔で表示された点群は,各瞬間における AUV の測位 誤差範囲を表すパーティクルであり,これが狭い範囲に 密集しているほど,AUV の位置が高い信頼性で推定さ 図 6 鹿児島湾における Tri-TON 2 の航跡(上から見た図). Tri-TON 2は黒丸の地点で海底に到着し,線上を矢印に沿っ て移動して白丸の地点に至った.Tri-TON 2 の計測値より推 定した海底地形の等深線を示すとともに,その凹凸を色の濃 淡で示す.深度の単位は m 図 7 Tri-TON 2 の観測により生成された海底の三次元画像 図 5 AUV Tri-TON 2れていることになる.分布の形状をよく見ると,ステー ションの近くほど狭い範囲に集まっており,また分布の 方向がステーションを中心とする円周に沿っていること がわかる.これはステーションを基準とする音響測位を もとにしている以上,極めて自然な分布であり,センサ の特性が適切に反映されているといえる.ただし,パー ティクルの分布そのものは主観的な指標であり,正解 (ground truth)との比較によって得られる「精度」と は異なることに注意を要する.
3.AUV HATTORI
近年,クレーンなしで運用可能な小型軽量 AUV に注 目が集まっている [巻 17].図 9 に示す HATTORI は一 人で運用できるサイズであることと,従来型の 1/10 の コストで海底画像観測が行えることを目標に開発された AUVで,2016 年に進水した.正式名称は Highly Agile Terrain Tracker for Ocean Research and Investigation であり,複雑な海底を忍者のように静かに,すばやく移 動できるようにという願いが込められている.ドローン 用の部品の活用や,制御ソフトウェアとして ROS(Robot Operating System)を採用することで,低コストかつ 使いやすい AUV を目指して開発が進められている. Tri-TON 2のように高精度な水平位置制御はできな いが,スキャニングソナーという比較的低コストなセン サのみを用いた環境認識および経路追従アルゴリズムに より,サンゴ礁のような複雑な海底に対して画像観測 に適した低高度(2 m 程度)を保ちつつ,ホバリング型 AUVよりも高速に移動することができる.これまでに 石垣島や沖縄本島のサンゴ礁海域の画像マッピングに成 功している [Maki 18b].図 10 は東京大学三崎臨海実験 所付近の浅海域における HATTORI の推定航跡と海底面 である.起伏に富んだ海底面に対して,約 2 m の高度を 保って追従できたことがわかる.また,本アルゴリズム を拡張することで,鉛直面を含む任意方向の壁面を追従 する手法が提案されている [野口 18].本手法は岸壁や 水槽といったインフラ点検への活用が期待されている. 新たな試みとして,サメやウミガメのような大型の海 中遊泳生物の自動追跡手法の開発が進められている.近 年,ロガーと呼ばれる小型の記録装置を生物に取り付け るバイオロギングという手法により,遊泳生物の生態 解明が進んでいる.生物に小型の音響発信機を取り付 け,AUV に追跡させる試みもある.しかしながらこれ 図 8 パーティクルフィルタによって推定された Tri-TON 2 の航跡 (2015 年 7 月 @ 鹿児島湾). 座標系の定義は図 6 と同じ.矢印は Tri-TON 2 の移動方向 図 10 HATTORI の航跡および海底面. 海底面は HATTORI に搭載されているスキャニングソナー の計測値から推定されたもの 図 9 AUV HATTORI 図 11 実環境におけるウミガメ追跡実験の様子. 左:ソナーにより得られた画像とウミガメの探知結果. 右:外部カメラの映像.左下の時間は自律行動開始から の経過時間を示すらの手法には,生物に何かを取り付け,後で回収する という大きな手間がかかる.そこで本研究では AUV が 自分の搭載するセンサのみを使って生物を探知し,一 定距離を保って自動的に追跡することを目指している. HATTORIの前方にマルチビームイメージングソナー という,ビデオカメラのように広範囲を同時計測できる 超音波センサを取り付ける.そしてその計測結果から機 械学習アルゴリズムによってウミガメを検出し,常に AUVの正面の一定距離となるように AUV を制御する. 2018年に実環境で行われた実験では,水族館で事前に 学習した識別器を用いることで,自然状態のアカウミガ メを約 270 秒間にわたり,4 m の距離で追跡することに 成功した [Horimoto 18, 堀本 19].
4.お
わ り に
本稿では自律型海中ロボット(AUV)の概要および, 当研究室における研究開発事例を紹介した. 海中世界はアクセス,センシングともに困難であるが, それがゆえにロボットの必要性が高く,また高度な自律 行動プログラムが求められる.近年急速に発展しつつあ る,ディープラーニングを代表とする機械学習アルゴリ ズムの応用も強く期待されている.ハードウェアに目を 向けると,「水中ドローン」という言葉が出てきたよう に,従来と比べて圧倒的に低コストな海中探査プラット フォームが登場しつつある.できることはまだまだ限ら れるが,過去に例を見ないペースで技術革新が進められ ている.低コストなハードウェアを使えるものにするた めの は,ソフトウェアであろう.海中ロボティクスに おけるソフトウェアの重要性は今後ますます高まると予 想される.◇ 参 考 文 献 ◇
[藤井 89] 藤井輝夫,浦 環:ニューラル・ネットによる潜水艇の運 動制御─水平航行の制御への適用─,日本造船学会論文集,Vol. 166, pp. 503-511(1989)[Horimoto 18] Horimoto, H., Maki, T., Kofuji, K. and Ishihara, T.: Autonomous sea turtle detection using multi-beam imaging sonar: toward autonomous tracking, 2018 IEEE Oceanic
Engineering Society, Autonomous Underwater Vehicles(AUV) (2018) [堀本 19] 堀本大洋:イメージングソーナーを用いた AUV による ウミガメの追跡手法,東京大学修士論文(2019) [巻 08] 巻 俊宏,近藤逸人,浦 環:自律型水中ロボットによる鹿 児島湾たぎり噴気帯の 3 次元画像マッピング,海洋調査技術, Vol. 20, No. 1, pp. 1-16(2008)
[Maki 14] Maki, T., Sato, Y., Matsuda, T., Shiroku, R. T. and Sakamaki, T.: AUV Tri-TON 2: An intelligent platform for detailed survey of hydrothermal vent fields, 2014 IEEE
Oceanic Engineering Society, Autonomous Underwater Vehicles(AUV)(2014) [巻 15] 巻 俊宏:海中ロボットと地図,日本ロボット学会誌,Vol. 33, No. 10, pp. 766-772(2015) [巻 17] 巻 俊宏:水中ドローン∼ローコスト AUV は使い物にな るか∼,ニュースレター「海」,オキシーテック,Vol. 33, pp. 14-18(2017) [巻 18a] 巻 俊宏:AUV:自律型海中ロボット,日本機械学会誌, Vol. 121, No. 1199, pp. 24-27(2018)
[Maki 18b] Maki, T., Noguchi, Y., Kuranaga, Y., Masuda, K., Sakamaki, T., Humblet, M. and Furushima, Y.: Low-altitude and high-speed terrain tracking method for lightweight AUVs,
J. Robotics and Mechatronics, Vol. 30, No. 6, pp. 971-979(2018) [野口 18] 野口侑要,堀本大洋,巻 俊宏:低コスト高速 AUV の 3
次元姿勢制御,ロボティクス・メカトロニクス講演会’18,2P2-B11(2018)
[Raanan 18] Raanan, B. Y., Bellingham, J., Zhang, Y., Kemp, M., Kieft, B., Singh, H. and Girdhar, Y.: Detection of unanticipated faults for autonomous underwater vehicles using online topic models, J. Field Robotics, Vol. 35, No. 5, pp. 705-716(2018) [Widditsch 73] Widditsch, H. R.: SPURV - The first decade,
APL-UW 7215, Appl. Phys. Lab., University of Washington(1973)
2019年 1 月 28 日 受理