避難行動における迷子シミュレーション
Behavior of Stray Children in a Crowd Simulation
岡谷 賢
1∗高橋 友一
2Masaru Okaya
1Tomoichi Takahashi
21,2
名城大学大学院 理工学研究科 情報工学専攻
1,2
Meijo University, Department of Information Engineering
Abstract: We propose a BDI agent and behavior model that can simulate the behavior of parent- child pairs in evacuations, In a time of emergency, parents and their children evacuate together, however, some child get lost. Parents look for their children, and go to them with against the major flow of evacuation. The experiments show that our proposed BDI model and modified force model simulate such family-minded human behaviors and congestions caused by the interactions in the crowd.
1 はじめに
エージェントベースシミュレーションは、エージェ ントが個別の視野、記憶、考え方を持ち個々の判断に よって行動を決める特徴をもつ。この特徴により年齢 層や家族連れなど構成の異なる集団の避難行動を表現 でき、その相違により避難状況の異なるシミュレーショ ンが可能になる。訓練を受けたリーダーと避難市民か らなるシミュレーションでは、避難経路について知識の あるリーダーが市民を避難所に誘導する現象がシミュ レーションにより示された [1]。また、避難市民の視界 を詳細にモデル化し、「非常口」の表示の数と避難の関 係を考察した例もある [2]。
World Trade Center(WTC)の事件をもとに、アン ケートによる情報を元に膨大で詳細な情報の解析が行 われている [3]。そこでは、これまでのシミュレータで 不足している点が多数指摘された。その中で、避難開始 後に人の集団が形成され、途中で集団がくっついたり 離れたりする現象が扱われていないことが指摘された。
我々は、避難時において人が集団を形成する要因の 一つとして、人間関係を考慮したエージェントモデル を提案した [4]。その中で、離れた場所にいる親子が一 緒に避難するシナリオにおいて、親が子供を見つけら れない状況について考慮されていなかった。この現象 について、親が子供を捜す行動、親と一緒にいない子 供の行動モデルについて詳細に検討する必要がある。 本論文では、避難時の迷子状態における親、子供の 行動を扱う行動モデルを提案し、実験により検証する。 2章では関連研究と人間関係について 3 章では提案手
∗連絡先: 名城大学大学院 理工学研究科 名古屋市天白区塩釜口 1-501
E-mail:[email protected]
法、プロトタイプシステムを用いた迷子状態のシミュ レーションを 5 章、最後に考察とまとめを述べる。
2 避難における人間関係
2.1 避難シミュレーションに対する要求事項
Galeaによって示された避難シミュレータが扱うべ き問題について、Pelechano と Xiaoshan それぞれの研 究での扱いを表 1 に示す [1][2]。
a) 移動の計算モデル:アーチ現象などに加え、大勢 の市民が非常口へ逃げている流れに逆らって消防 隊が建物内に移動するような動きや、階段付近で 階段を下りようとしている人と上階から降りてき た人の動きなどが実際には生じる。これらの人の 動きは従来のシステムでは扱われていない。 b) エージェントの情報収集能力:エージェントは非
常口の案内板や周囲にいる人の動き、避難路の瓦 礫などの情報を視覚を通じて知ることができる。 また、周囲にいる人と会話することで、周囲の人 の知識と自分の知識を共有することができる。こ の情報収集能力は避難者の心理状態により変化 する。
c) 集団での避難:集団の避難状況には色々な要因が あり、様々なシナリオでのシミュレーションが必 要である。例えば、避難訓練を受けたリーダとそ の指示に従う人などが集団で避難する状況を扱う シミュレーションが検討された [1]。ただし、人 間関係や心理状態に応じて自然に集団が形成、解
表 1: 避難シミュレータが扱うべき問題と関連研究での
扱い 問題項目 Pelech. Xiaos.
a)移動の計算モデル
避難市民の渋滞 ○ ○
けが人とすれ違う(同方向) ○ ○ 救助隊とすれ違う(異方向) △ △ 階段(上階から来た人との合流) △ △ b)エージェントの情報収集能力
避難市民個別の視野 △ △
避難市民による情報の共有 ○ ○
避難市民間の通信 × ×
避難市民の心理モデル × ○
c)集団での避難
集団で避難する ○ ○
集団の形成、解散 × ×
人間関係 × ×
d)災害対策本部や救助隊からの情報提示
救助隊の存在 × ×
災害対策本部の存在 × ×
避難アナウンス × ×
e)避難路
避難路(瓦礫、煙、熱、水) 瓦礫 瓦礫
散する現象、避難している間に複数の集団が一 つになったり、分裂したりする現象が扱われてい ない。
d) 災害対策本部や救助隊からの情報提示:WTC で は建物内アナウンスなど、避難中に知った情報が 行動決定に影響を与えた報告がある [5]。Pan ら は、非常口の表示にエージェントが気づくかとい う視界をシミュレーションすることで、非常口の 表示位置と避難時間の関係を示した [2]。有用な シナリオを実現するために、個々が情報提示され た内容に応じて行動決定をするモデルが必要で ある。
e) 避難路:避難路が瓦礫で通れないことや、煙で視 界がほとんどないことや、熱で近づけない場所、 フロアがぬれていて歩きにくい場所など避難行動 を妨げる様々な障害がある。これらの災害状況に 応じて、避難経路は変化する。
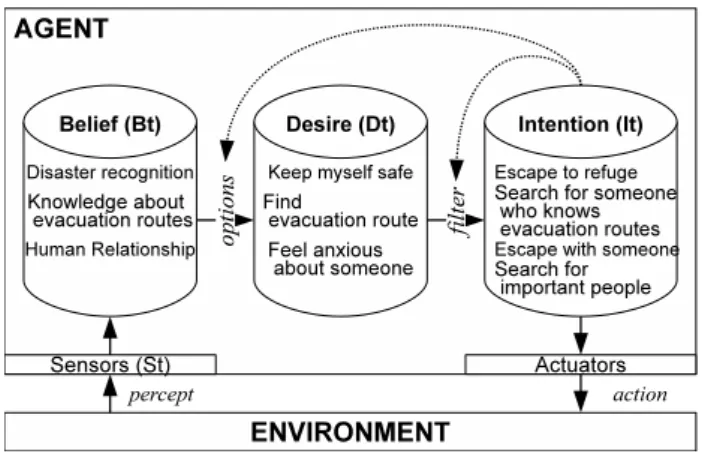
2.2 人間関係を取り入れた BDI モデル
(c)の問題について、我々は BDI モデルをベースに 人間関係を考慮したエージェントの行動モデルを提案 した [4](図 1)。このモデルの特徴は、エージェントの 人間関係に応じて行動決定の過程で考慮される事象が 異なる点である。
St = {s | s ∈ sensor input} (1)
図 1: 人間関係を考慮したエージェント行動モデル
Bt = belief (St, Bt−1) (2) Dt = option(Bt, It−1) (3) It = filter (Dt, It−1) (4) ここで、t は意思決定シミュレーションにおけるタイ ムステップを示し、Stは t においてエージェントが知 覚した情報の集合を示し、Bt、Dt、Itはそれぞれ BDI モデルにおける Belief、Desire、Intention を示す。
RoboCup Rescue Simulation v.1 (RCRS)の市民エー ジェントに、親子関係の属性と行動決定の過程が異な る、親、子供の市民エージェントを実装し、いくつか の例において人間関係の違いに応じて避難時間や避難 行動が異なる結果を示した。具体的には親子が一緒に 避難する行動が考慮できることを示した。ただし、離 れた場所にいる親子が一緒に避難する際に以下の問題 が考慮できていなかった。
• 相手の場所を正確に知らない
• 親が子供を捜している時に子供が歩き回る場合 は、親が子供を発見できない可能性がある
3 避難行動における迷子
災害管理システムや救助隊は、迷子になった人など を見つけて適切に誘導する必要がある。
迷子は、避難者が避難路などの地理情報を知らない 場合に起こる。具体的には、避難者がイベント会場や 地下鉄の駅など普段利用しない建物で避難しなければ ならない場合や、火災などの災害状況によって普段使っ ている経路が使えない場合に、利用した事のない経路 を使って避難する必要がある。
家族や友人などのグループで行動している場合はメ ンバー全員が経路を知っているとは限らず、経路を知っ ている人に付いて行動している人がいる。また、迷子
になった家族や友人を心配して捜しに行くような状況 が考えられる。
これらの問題を扱う災害管理システムを評価するた めには、エージェントの行動決定に基づいて迷子状態 が発生するプラットフォームが必要となる。
本論文では,家族や友人を心配して捜しに行くよう なエージェントの行動モデルについて記述する。
3.1 迷子状態の定義
避難者が他の人と一緒に避難しようと考えた時点に おいて相手の状況として以下の場合が考えられる。 a) 相手と一緒にいる場合
b) 相手の位置を常に知ることができる場合 c) 相手の位置を大体わかっている場合
a), b)の場合必ず一緒に避難できるのに対し、c) の場 合は必ず相手と会えるとは限らない。多くの場合、災 害状況は c) のように相手の位置を正確に知らないこと が多いと考えられる。
また、避難者 A が特定の相手と一緒に避難しようと している(会おうとしている)場合であっても、その 相手が避難者 A を待っているとは限らない。例えば、 親が子供を捜しに行くような状況では、避難経路を知 らない子供は、災害が起きた時右往左往したり、避難 経路を間違えたりするような状況が考えられる。その 子供を捜しに行った親が子供を見つけられないような 状況が考えられる。
本論文では、以下の状態を迷子状態と定義し、迷子状 態でのそれぞれのエージェントの行動をモデル化する。
• 子供が親を確認できない状態
• 親が子供を確認できない状態
3.2 人が安全であることの確認
避難者は、視覚や他の人と会話により情報を得る。 視覚: エージェントの視界は制限され、周囲にいる状 況のみを知る事ができる。視界に子供エージェン トが存在していれば、子供が安全である事を認識 できる。
会話: 周囲の人との会話や避難誘導している人と会話 する事で、子供が安全である事を認識できる可能 性がある。視覚により発見した人としか会話する 事ができない。
通信: 災害時に携帯電話で安否確認するサービスなど、 災害時でも携帯電話により他人の安全を確認する 事ができる。避難シミュレータは、離れた場所に いるエージェントどうしが安否確認できるのに対 し、通信帯域の制限や災害時優先電話などを考慮 する必要がある。
今回は、視覚による安全の確認方法のみを考慮する。
4 エージェントの行動を扱うフレー
ムワーク
3節に記述した問題を扱うフレームワークを図 2 に示 す。エージェントの Sense-Reason-Action サイクルは
∆tごとに同期される。Crowd Simulation のモジュー ルは、エージェントの行動に応じてそれぞれのシミュ レーションに必要な時間分解能 ∆τ で ∆t 間の世界を予 測する。
図 2: 避難シミュレーションのフレームワーク
4.1 エージェントの行動計算モデル
エージェントの行動によってその行動を扱うモデル は異なる (表 2)。意思決定モデル(Agent モジュール) ではエージェントの意図を決定し、移動モデル(Crowd simulation内の Traffic モジュール)では意図に応じた 目的地への移動をシミュレーションする。どのような 行動をとるかは意思決定モデルで扱い、他の人や壁を 避けて歩く動作は移動モデルで扱う。一方、子供が親 について行く行動を扱うためには、意思決定モデルが ついて行く人などを決定するだけでなく、移動モデル でも、ついて行く人に合わせて目的地を更新する必要 がある。親が子供を連れて行く行動を扱う場合も、意 思決定モデルが連れて行く人を決定し、移動モデルで も、連れて行く人のスピードに合わせたり、連れて行 く人が混雑に巻き込まれて止まった場合にその人を待 つ動作を扱う必要がある。
表 2: エージェントの行動と対応するモデル
エージェントの行動 エージェントモデル 移動モデル
障害物を避ける × ⃝
安全な場所へ移動する ⃝ ×
親が子供を捜す ⃝ ×
子供が親について行く ⃝ ⃝
親が子供を連れて一緒に避難 ⃝ ⃝
以下に、親が子供を連れて行く行動を意思決定モデ ルのみで扱った場合と、意思決定モデルと移動モデル で扱う場合の違いを記述する。
4.1.1 意思決定モデルだけで連れて行く動作を扱う 場合
親の視界から子供が出たら BDI モデルの Belief の状 態が変化し、子供エージェントを待つ(子供エージェ ントの方へ向かう)動作に変更することで、子供エー ジェントから離れないようにする。この方法を用いた 場合、∆t のタイムステップの周期で意図を変更する。
4.1.2 移動モデルで連れて行く動作を扱う方法
∆τの周期で親子の位置関係に応じて親が歩くスピー ドを調節することで、親子の間の距離を一定に保つ。他 の人に押されるなどにより親子が引き離されてしまっ た場合などは、BDI モデルにより再考慮されることも 考えられる。
4.2 迷子状態における意思決定
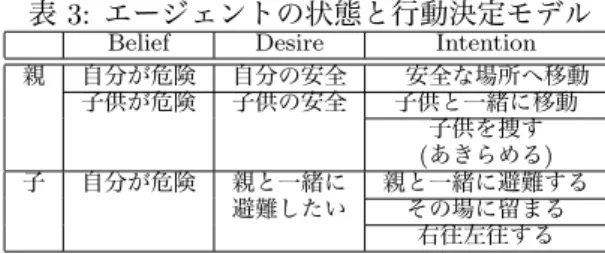
災害状況や人間関係に応じてエージェントがどのよ うな行動 Itをとるかを決定する。個々のエージェント の人間関係に応じた行動決定方法を表 3 に示す。
4.2.1 親が子供と会えないときの行動
親は、子供がいた場所を知っている場合と知らない 場合がある。子供がいた場所を知っている場合、子供 がいた場所を探しに行く可能性が高い。子供を見つけ る事ができた場合は子供と一緒に避難し,子供を見つ ける事ができなかった場合は、その周辺を探索したり、 あきらめて避難するといった行動をとると考えられる。 親は子供と別の場所にいても子供がどこにいるかを 把握している可能性が高いと考え、親は子供のいる場 所を知っていると仮定し、親エージェントの、初期状 態 B0は、子供がどこにいたかの情報を含んでいる。
表 3: エージェントの状態と行動決定モデル
Belief Desire Intention 親 自分が危険 自分の安全 安全な場所へ移動
子供が危険 子供の安全 子供と一緒に移動 子供を捜す (あきらめる) 子 自分が危険 親と一緒に 親と一緒に避難する
避難したい その場に留まる 右往左往する
4.2.2 子供が親と会えないときの行動
子供は、避難経路を知らない可能性が高く恐怖感な どで、行動できなかったり右往左往する可能性がある。
4.3 移動の計算モデル
意図 Itを遂行するために他のエージェントや壁と衝 突しないようにエージェントを移動する。人の動きは It
を決定するステップ(∆t)より細かいステップ(∆τ) で、Helbing の式に Itを組み込んだモデルで計算する [6]。
mi
dvi
dt = fsocial+ faltruism (5)
fsocial = mi
vi0(t)e0i(t) − vi(t) τi
+ ∑
j(6=i)
fij+∑
W
fiW
faltruism = ∑
j∈G
fij
ここで、fsocialは Helbing が示した社会的な力であ り、fijは他のエージェントに衝突しないために他のエー ジェントから離れようとする力、fiW は壁から離れよ うとする力を示している。faltruismはグループで避難 している際にグループのメンバーと離ればなれになら ないための力を示す。エージェントの移動はこれらの 力の合力として計算される。
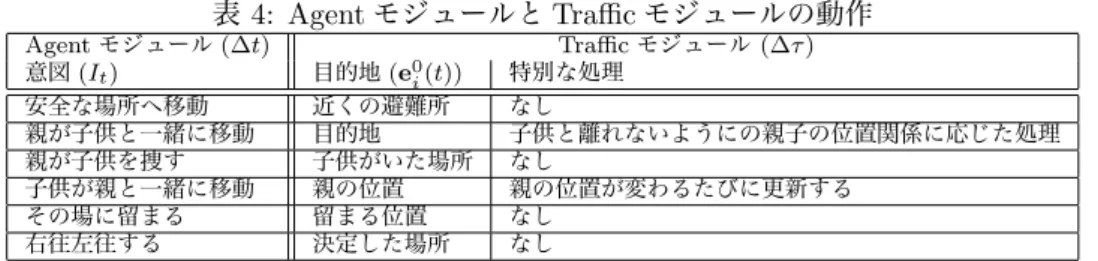
エージェントの意図と目的地の関係を表 4 に示す。 エージェントの意図はステップ (∆t) ごとに変化し、目 的地はマイクロステップ (∆τ) ごとに変化する。親が 子供を助けに行く動作や子供が親について行く動作で は、親の位置が目的地となり、親の位置が変わるごと に目的地が変化する。これにより、親子が一緒に避難 する状況を実現する。
歩行モデルでは、集団で避難しようと意図している 間は常に集団のまとまりを保とうとする力が働き、集 団で避難している時に集団のうちの一人が離れてしまっ たような場合、それを認識し意図の変更を考慮するの は BDI モデルである。
miはエージェント i の体重を示す。vilimitはエージェ ントの最大移動速度で、年齢や体力などエージェント
属性によって決まる。vdesirei はエージェントが移動し たい速さで、危険を感じているほど速く移動したいこ とを示し、目的地に到達すると 0 となる。eiは目的地 方向の単位ベクトル、vpi は現在の歩行速度ベクトル、 tは時間を示す。fijはエージェントが決めた Itに応じ た目的地に向かう力を示す。
5 実験
プロトタイプシステムを用い、人間関係を考慮した 場合としない場合の違い、親が子供を連れて行く動作、 親が子供を見つけられない状況について検証した。
5.1 人間関係を考慮した場合としない場合
の違い
図 3: 親子が参加するイベント
部屋からの避難例として親子が参加する大規模なイ ベント会場をとりあげる (図 3)。このイベントでは子 供が会場の中央で作業をしており、親は周りで子供を 見守っている。
150人が大きなイベント会場におり幅 4m のドアか ら外へ避難する。初期状態、120 ステップ、240 ステッ プ後におけるシミュレーション結果を示す (図 4)。
a) 人間関係のない大人 150 人 (左に 50 人、右に 100 人) の避難状況は、避難開始とともに全員がドア に移動した。
b) 人間関係のある親子 150 人 (右の集団 50 人が子 供、左の集団が親と子供のいない大人 100 人) の 避難状況は、子供のいる大人は子供の方へ移動 し、子供と一緒にドアへ向かった。子供のいない 大人は避難開始とともにドアに移動した。 120ステップにおいて両方とも約 140 人が部屋内にい るがその避難行動の違いが確認できる。240 ステップ において避難した人数に差がある事がわかる。
5.2 親が子供を連れて行く動作
子供をつれて歩く行動の実現方法として以下に示し た 3 種類の方法に対して比較した。
a) 親子関係を考慮しない場合(子供を迎えに行かない) b) 親が子供と同じ速度(固定)で歩く場合(BDI モ
デルで子供を待つ)
c) 4.3で示した faltruismを実装した場合
それぞれの場合での避難時間を図 5 に示す。a) の場合に 比べて b),c) の場合は避難に時間がかかっている事がわ かる。b) の場合に比べて c) の場合の方が時間がかかっ たことについて、b) の場合は親は子供が視界 (30m) に 入っていれば子供との距離が長くなっても移動速度を 変えないのに対し、c) の場合は親が出口付近で子供と 離れないように低速度で移動した事により、全体の速 度が遅くなったと考えられる。また、シミュレーション 中に親が子供を捜す意図を持った回数を比較すると、b) の場合は 400 ステップ以降も継続しているのに対し、c) の場合は、子供が常に親の視界に入っており一緒に避 難するという意図のみにより避難している事がわかる。
0 400 800
時間[s] 0
50 100 150
避難した人の数
a b c
0 400 800 時間[s] 0
25 50
子供を捜すことを意図した回数
a b c
図 5: 上:避難したエージェント数の時間的変化、下: シミュレーションステップごとの子供を捜す意図を持っ た回数
表 4: Agent モジュールと Traffic モジュールの動作
Agentモジュール (∆t) Trafficモジュール (∆τ) 意図 (It) 目的地 (e0i(t)) 特別な処理
安全な場所へ移動 近くの避難所 なし
親が子供と一緒に移動 目的地 子供と離れないようにの親子の位置関係に応じた処理 親が子供を捜す 子供がいた場所 なし
子供が親と一緒に移動 親の位置 親の位置が変わるたびに更新する
その場に留まる 留まる位置 なし
右往左往する 決定した場所 なし
5.3 迷子状態のシミュレーション
親が子供を捜しに行く際に、子供が移動する場合の シミュレーションを行った。子供の動きを以下の場合 のについてシミュレーションを行った (図 6)。 a) 子供の位置を固定した場合(子供が最初にいた位置
に留まろうとする)
b) 子供が他の人に押される場合(他のエージェントに 押されたて移動していく)
c) 子供が右往左往することで移動した場合
a)子供の位置を固定した場合、全ての親は子供と一緒 に避難した。b) 子供が他の人に押される場合、他のエー ジェントの動きに押されて子供の位置が変化し、親が 子供を見つけられない状況が確認できる。c) 子供が右 往左往することで移動した場合、子供エージェントが ランダムに移動した事で、親が子供を見つけられない 状況が確認できる。
また、1000 ステップ付近までは c) の場合が最も早く 避難しているのに対し、それ以降では c) の場合が最も 避難に時間がかかっている事がわかる。今回実験に用 いた地図が単純な形であったため、子供エージェント が移動した場合の方が、子供が親の視界に入る確率が 高くなったためだと考えられる。
6 考察とまとめ
避難シミュレーションにおいて、親子が一緒に避難 するシナリオで、子供を捜す親、親と一緒にいない子 供の行動モデルとして、視界からの情報を元に相手を 確認しながら行動するエージェントの行動モデルを提 案した。このモデルを用いて、子供が移動した事によ り、親が子供に会えない状況が発生する避難シミュレー ションを示した。この結果は避難する人の年齢、体力 などの身体的な差の他に従来研究では扱われていない 人間関係などの内的な属性とそれに基づく行動の違い が避難シミュレーションにおいて重要な要因になる事 を示している。
参考文献
[1] N. Pelechano and N.I. Badler, “Modeling crowd and trained leader behavior during building evac- uation,” IEEE Computer Graphics and Applica- tions, vol.26, pp.80–86, Nov. 2006.
[2] X. Pan, “Computational modeling of hu- man and social behaviors for emergency egress analysis,” PhD thesis, Stanford, 2006. http://eil.stanford.edu/xpan/
[3] E.D. Kuligowski and S.M. Gwynne, “The need for behavioral theory in evacuation modeling,” In Pedestrian and Evacuation Dynamics 2008, pp.721–732, 2008.
[4] 岡谷 賢,高橋友一,“避難シミュレーションにお ける人間関係を考慮した行動モデルの提案,” JAWS 2010論文集,pp.–,Oct. 2010.
[5] E.R. Galea, L. Hulse, R. Day, A. Siddiqui, G. Sharp, K. Boyce, L. Summerfield, D. Canter, M. Marselle, , and P.V. Greenall, “The uk wtc9/11 evacuation study: An overview of the method- ologies employed and some preliminary analysis,” Pedestrian and Evacuation Dynamics 2008, eds. by S.A. Klingsch W.W.F., Rogsch C. and M. Schreckenberg, pp.3–24, Springer, 2008.
[6] I.F.D. Helbing and T. Vicsek, “Simulating dy- namical features of escape panic,” NATURE, pp.407:487–490, 2000.
初期状態 120ステップ 240ステップ a)人間関係なし
b)人間関係あり
図 4: 避難シミュレーション、左:人間関係のない集団の避難、右:人間関係のある集団の避難(薄い緑色:子供、 濃い緑色:親、緑色:その他の大人)
0 400 800 1200
時間[s]
0 50 100 150
避難した人の数
子供の位置を固定 子供が他の人に押される 子供がランダムに歩き回る
600ステップ 1200ステップ a)子供の位置を固定
b)子供が他の人に押される
c)子供がランダムに歩き回る
図 6: 子供の動作によって避難状況が異なるシミュレーション。左上:初期状態、左下:避難した人数、右:600、 1200ステップのエージェントの避難状況