平成
25
年度
学士学位論文
ウェアラブル
AR
環境における
3
次元知
覚特性の検討
Property of three-dimensional perception in the
wearable AR environment
1140378
三木 悠平
指導教員
繁桝 博昭
2014
年
2
月
28
日
要 旨
ウェアラブル
AR
環境における
3
次元知覚特性の検討
三木 悠平
近年の急激なスマートフォンの増加に伴いAR関連のアプリケーションも多く利用される ようになってきた. さらにウェアラブル端末の話題に接する機会も多くなった. 今後はAR 技術とウェアラブル端末が組み合わさり, 普及していくと考えられる. 現在このようなウェ アラブル端末によるAR表示を実現したデバイスはまだ普及していないが既に基礎的研究は 行われている. 先行研究ではウェアラブル端末の一種であるヘッドマウントディスプレイの 2次元ディスプレイ上では奥行き位置が曖昧になることから, 奥行きの明示的表現を利用し た注釈提示手法の検討が行われている[2]. また, 動的奥行き手がかりを用いたヘッドアップ ディスプレイの奥行き知覚効果についても検討されている[3]. しかし, ARと実世界に存在 するオブジェクト等との奥行き位置の識別については検討されていない. そこで本研究では ARと実世界に存在するオブジェクトとの奥行き位置の関係について検討を行った. 実験は 3Dオブジェクトのみを提示した場合の奥行き位置の判断と3Dオブジェクトに加え, 実物体 である積み木を並べた環境で行い, 提示する刺激の大きさの変化および実物体の有無がどの ように奥行き判断に影響を及ぼすか検討を行った. 実験の結果, 提示される刺激が3Dオブ ジェクトのみの場合は大きさが奥行き判断に影響を及ぼすことが示された. 実物体を設置し た環境ではサイズの操作の有意な効果は認められなかった. 実物体が無い場合, 強調した刺 激のサイズ差が促進的効果や妨害的効果となったが, 実物体と複合的に提示した場合, 各奥 行き位置の実物体のサイズ変化と等しくなくなるため, サイズ差の強調の効果が消失するこ とが示された. キーワード AR, 拡張現実, HMD, 奥行き, 3次元知覚Abstract
Property of three-dimensional perception in the wearable AR
environment
Yuhei Miki
Recently many AR related applications are used along with the popularization of smart phones. Also, opportunity to hear the development of wearable devices is increasing. The AR technology and the wearable device can be combined and this kind of combined device should spread in future. While such devices have not been popular now, basic researches are conducted so far. Previous research reported that as users feel unnatural when an AR environment is presented through 2D display on the head mounted display (HMD) which is one kind of wearable devices, the way of visualizing depth information by annotations in AR environments is evaluated [2]. Another study investigated effects of depth perception by dynamic depth cues for monocular head-up display with AR [3]. However, perception of depth position of objects from AR with real objects is uncertain. Thus, in this research, the relation of the perceived depth position of AR with objects existing in the real world was investigated. In the experiment, participants judged the depth position of virtual 3D objects with or without the set of real blocks. Effects of manipulating the size depth cue of virtual objects and the existence of real objects were analyzed. As a result, perceived depth position of 3D objects without real objects showed a significant effect of manipulating size depth cue while 3D objects with real objects did not. The performance of depth judgment of virtual object with no real object was promoted or inhibited by manipulating size
depth cue. However, with real objects, the inconsistency of the property of size depth cue change with depth position of real object with that of virtual object may have cancelled the promotive effect of the depth judgment.
目次
第1章 はじめに 1 1.1 背景・目的 . . . 1 1.2 先行研究 . . . 2 1.3 AR . . . 2 1.4 ARToolkit . . . 3 1.5 MR(Mixed Reality) . . . 4 第2章 実験手法 5 2.1 実験装置 . . . 5 2.2 実験環境 . . . 8 2.3 被験者 . . . 8 2.4 刺激. . . 8 2.5 手続き . . . 16 2.5.1 実験1(実物体無し) . . . 16 2.5.2 実験2(実物体有り) . . . 16 第3章 実験結果 19 3.1 実験1(実物体無し) . . . 19 3.1.1 刺激提示から4個の物体全てを回答するまで . . . 19 3.1.2 刺激提示から1個目の物体を回答するまで . . . 19 3.2 実験2(実物体有り) . . . 25 3.2.1 刺激提示から4個の物体全てを回答するまで . . . 25 3.2.2 刺激提示から1個目の物体を回答するまで . . . 26 3.3 実験1, 実験2の比較. . . 30目次
第4章 考察 31
第5章 まとめ 34
謝辞 35
図目次
1.1 ARの一例 . . . 3
1.2 MRの位置づけ . . . 4
2.1 Apple製 iPad mini . . . 6
2.2 SONY製HMZ-T1 . . . 6 2.3 Logicool製 HD Webcam C310 . . . 6 2.4 サンワサプライ製 NT-6U . . . 6 2.5 システム構成図 . . . 7 2.6 実験に用いた刺激の模式図 . . . 10 2.7 24通りの刺激パターン . . . 11 2.8 実験1(実物体無し)のサイズ整合条件の刺激 . . . 12 2.9 実験1(実物体無し)のサイズ強調条件の刺激 . . . 12 2.10 実験1(実物体無し)のサイズ不整合条件の刺激 . . . 12 2.11 実験2(実物体有り)のサイズ整合条件の刺激 . . . 13 2.12 実験2(実物体有り)のサイズ強調条件の刺激 . . . 13 2.13 実験2(実物体有り)のサイズ不整合条件の刺激 . . . 13 2.14 刺激提示用マーカー . . . 14 2.15 使用した積み木 . . . 15 2.16 実験1模式図 . . . 17 2.17 積み木の設置位置 . . . 17 2.18 実験2模式図 . . . 18 3.1 実験1(実物体無し) 結果. . . 20 3.2 実験1(実物体無し) 結果(刺激提示-1個目まで) . . . 23
図目次
3.3 実験2(実物体有り) 結果. . . 25 3.4 実験2(実物体有り) 結果(刺激提示-1個目まで) . . . 26 3.5 実験1(実物体無し), 実験2(実物体有り) 結果 . . . 30
表目次
3.1 実験1(実物体無し) 被験者ごとの回答時間 (秒) . . . 21 3.2 実験1(実物体無し) 被験者ごとの正答率 (%) . . . 22 3.3 実験1(実物体無し) 被験者ごとの回答時間(刺激提示-1個目まで) (秒) . . . 24 3.4 実験2(実物体有り) 被験者ごとの回答時間 (秒) . . . 27 3.5 実験2(実物体有り)被験者ごとの正答率 (%) . . . 28 3.6 実験2(実物体有り) 被験者ごとの回答時間(刺激提示-1個目まで) (秒) . . . 29第
1
章
はじめに
1.1
背景・目的
近年私たちの身体に装着し, 持ち歩くことが可能なウェアラブル端末の話題に接する機会 が多くなった. ウェアラブル端末に代表される例として頭部に装着する端末や手首に装着す る腕時計型の端末などが挙げられる. 前者のウェアラブル端末はヘッドマウントディスプレ イ(HMD)として一般家庭向けの製品として販売される程度まで普及してきた. 今後の技 術革新により現在よりさらに身近なものになると予想される. また, 現在はスマートフォンの爆発的な普及が進んでいる. 総務省のデータではスマート フォンの世界販売台数が2011年は26.6%であるのに対して, 2016年には55.9%に成長する と示唆されている[1].このようにスマートフォンの市場は高い成長が見込まれている. この スマートフォンの普及によってアプリと呼ばれるスマートフォン上で使用するソフトフェア の市場が著しく成長している. その中にAR(拡張現実)の技術を用いたアプリケーション も多く見られるようになった. 今後先述のウェアラブル端末が普及することでAR技術はさらに身近なものになると考え られる. しかしAR技術は便利で私たちの生活を助けてくれるツールである一方, 問題点も 挙げられる. AR は現実世界にヴァーチャルな世界を重畳できることが特徴であるが, 重畳 したヴァーチャルな情報が原因で物体の奥行き判断を誤る可能性も考えられる. 奥行き判断 に誤りを生じたり, 時間を要すると衝突,転倒などの事故につながる危険性がある. さらに車 や自転車の運転中にAR技術を使用した場合にこのような問題が発生すると重大な事故につ ながる恐れがある.1.2 先行研究 そこで将来普及すると予想されるHMDを使用したウェアラブルARシステムを構築し, 提示する刺激の画面上での大きさの変化がどのように奥行き判断に影響を及ぼすのか, 現実 世界に重畳したときに実在するオブジェクトが奥行き判断にどのような影響を及ぼすかにつ いて検討を行った. また, 得られた結果より奥行き判断を正確かつ瞬時に可能とする情報提 示手法の検討を行うことで今後のARの発展に貢献することも本研究の目的である.
1.2
先行研究
先行研究には浦谷ら(2004)のAR 環境における奥行き曖昧性と視認性を考慮した注釈提 示手法とその評価がある[2]. この研究では単眼ヘッドマウントディスプレイ等の2次元ディ スプレイ上では奥行き位置が曖昧になることから, 奥行きの明示的表現を利用した注釈提示 手法を提案している. 提示する注釈までの距離に応じて注釈の色を変化させる手法, 注目し ている注釈以外は半透明化及び枠の線種を変更することで奥行き位置の識別と視認性に効果 があるとされている. しかしながら提示する刺激の大きさ, 実世界に存在するオブジェクト 等と奥行き位置の識別の関係性については検討されていない. また, 堀田ら(2012)の研究では動的奥行き手がかりを用いた単眼ヘッドアップディスプレ イの奥行き知覚効果について検討されている[3]. この研究では動的な奥行き手がかりを用 いて奥行き知覚位置の制御を行っている. その結果, 提示する映像を近くから遠くに遠近法 的に動かす動的遠近法を奥行き手がかりに用いた場合, 120m までの奥行き位置の制御を行 うことが可能である. 動的奥行き手がかりとは別の奥行き手がかり, ヘッドアップディスプ レイより没入感の高いヘッドマウントディスプレイを用いた奥行き知覚についてさらなる検 討を行う必要があると考えられる.1.3
AR
AR(Augmented Reality)とは日本語で言い換えると拡張現実と表現でき, 現実の世界を 拡張するととらえることができる. 現実世界を拡張するとは, 現実世界にヴァーチャルな世1.4 ARToolkit 界を重畳することである. 具体的な例を挙げると, 道案内で目的地の方向や距離, さらには建 物の情報なども現実の世界に重ねて表示するといった例がある. また, HMDにカメラを装 着することで, 体の動きに対応したAR環境を体感することも可能である. このようにAR はゲーム, ナビゲーション, 広告, 仕事の効率化といった多くの分野で利用されている. 本実 験ではマーカーと呼ばれる目印を読み取り, あらかじめマーカーに対応させておいた3Dオ ブジェクトの提示を行うARを使用する. 本実験で用いたARToolkitを使用したARの例 を図1.1に示す. 図1.1 ARの一例
1.4
ARToolkit
本研究で用いたARToolkitとは奈良先端科学技術大学の加藤博一教授によって開発され たARアプリケーション開発用のフリーのC 言語ライブラリである [9]. ARToolkitでは マーカーを使用し, カメラでマーカーを読み取ることで3Dオブジェクトを現実世界に重畳 させることができる. カメラとマーカーの位置は関係なく, マーカーの動きに対応して3D1.5 MR(Mixed Reality)
図1.2 MRの位置づけ
オブジェクトも追随することができる. マーカーについては第2.4節で詳しく述べる.
1.5
MR(Mixed Reality)
本 研 究 で は AR の 技 術 を 用 い て 研 究 を 行った が AR の 他 に MR(Mixed Reality), VR(Virtual Reality)がある. VRとはCG(Computer Graphics)によって人工的世界を構 成し, 人工現実感を体感する技術である. MRは図 1.2に示すように仮想現実のVRと拡張 現実のARを総称した技術であり, 今後これらの技術が加速的に普及していくと考えられる.
第
2
章
実験手法
2.1
実験装置
本実験の刺激はMicrosoft Visual Studio 及びARToolkit を用いて制御した. 刺激の詳 細については第 2.4節で述べる. 刺激を提示するために必要なマーカーの表示には iPad mini (Apple 製 16GB)を使用した. ウェアラブルAR環境の構築のため被験者には Web
カメラ (Logicool製 HD Webcam C310)を装着したヘッドマウントディスプレイ (SONY
製 HMZ-T1)を使用し, 提示した刺激の奥行き判断のためにテンキー (サンワサプライ製
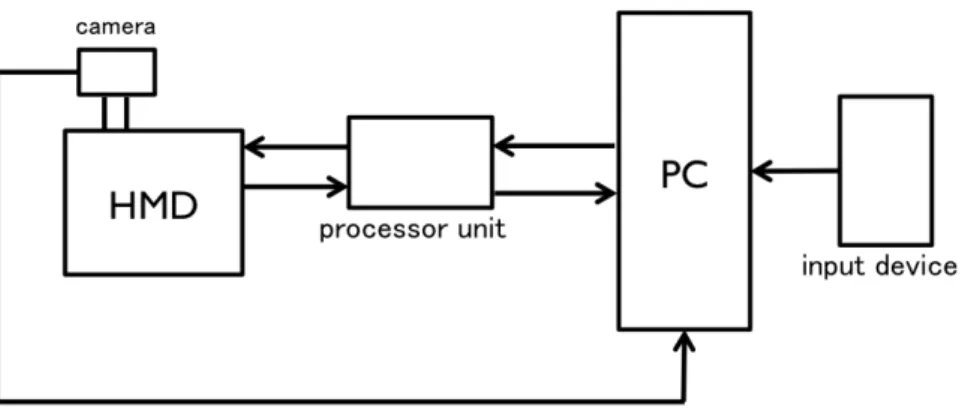
NT-6U) を使用した. 実験は十分な広さを有する机を使用して行った. 本研究で構築した ウェアラブル ARシステムのシステム構成図を図 2.5に示す. また, 実験に使用したコン ピュータのスペックは以下である.
• OS : Windows7 32bit
• CPU : Intel社製 Core i7 2.80GHz
2.1 実験装置
図2.1 Apple製iPad mini
図2.2 SONY製 HMZ-T1
図2.3 Logicool製 HD Webcam C310
2.1 実験装置
2.2 実験環境
2.2
実験環境
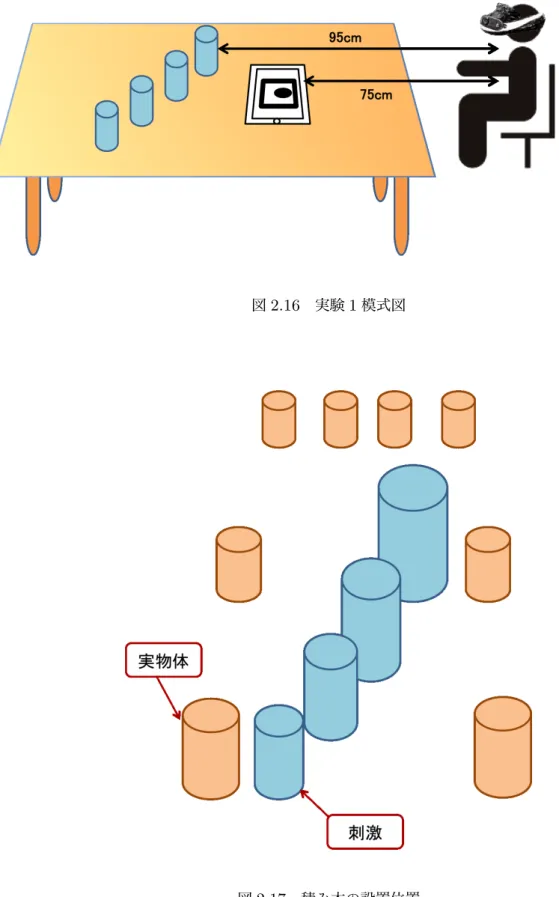
本実験を行うにあたってマーカーを表示するiPad mini に部屋の蛍光灯, 電球等が反射し て映りこまない場所で行った. iPad miniに部屋の蛍光灯等が映り込むことにより, Webカ メラでマーカーを正常に読み取ることができず, 3Dオブジェクトの誤表示が起きる恐れが ある. また, 実験は十分な広さを有する机の上で行った. 被験者は椅子に着席し, 被験者から マーカー表示用iPad miniまでの距離を75 cm , 提示される刺激までの距離を95 cm にし て実験を行った.
2.3
被験者
被験者は正常な視力(矯正含む)の大学生12名で行った. 実験を行うにあたって, 実験内 容の説明書を読み, 実験の目的及び実験内容を理解した上で自由意思による参加である同意 を署名によって得た. また同時に被験者の利き手, 利き目, 視力, 一般色覚の保持者であるか, その他実験に支障をきたす病気や手術歴の有無を確認するアンケートを行った. 実験時の 視力については, 提示する刺激を認識できる視力を有していれば特段に視力の統制は行わな かった.2.4
刺激
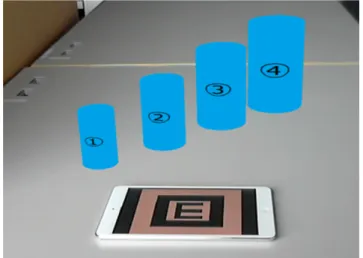
本実験で用いた刺激はMetasequoia (3Dモデリングソフトウェア)を用いて作成した. 本 実験では以下の3条件に従って提示する刺激を変化させた. • サイズ整合条件 • サイズ強調条件 • サイズ不整合条件 実験に用いた刺激の模式図を図 2.6に示す. サイズ整合条件の刺激は直径4.5 cm , 高さ2.4 刺激 異なるように24通りの組み合わせを作成した. 実験 1(実物体無し)のサイズ整合条件に用 いた刺激は図2.8である. また, 24通りの組み合わせは図2.7に示す. サイズ強調条件は円 柱のサイズ差が強調してある条件であり, サイズ整合条件の刺激の大きさを位置が最も手前 の円柱から順に120%, 110%, 100%, 90% にシミュレートした. 実験1(実物体無し)のサイ ズ強調条件に用いた刺激は図2.9である. 3つ目の条件は手前の刺激ほどシミュレートした 大きさが小さくなるサイズ不整合条件であり, 用いた刺激はサイズ整合条件の刺激の大きさ を位置が最も手前の円柱から順に90%, 100%, 110%, 120%にシミュレートした. 実験1(実 物体無し)のサイズ不整合条件に用いた刺激は図2.10である. サイズ整合条件同様にサイズ 強調条件, サイズ不整合条件ともに円柱4個を一組とし, 奥行き位置が異なる24通りの組み 合わせを作成した.
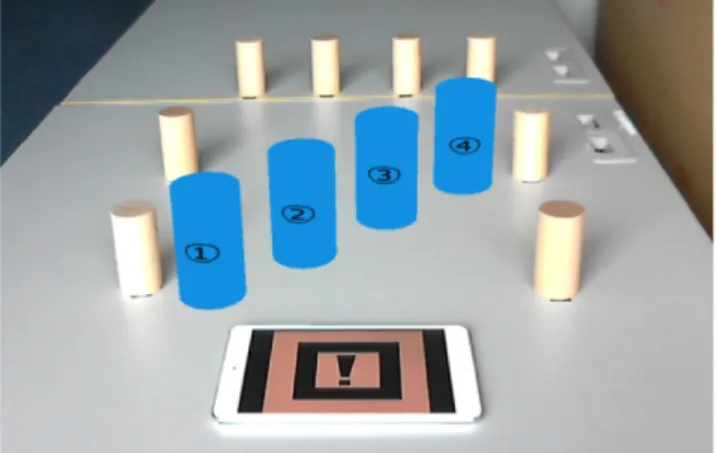
2.4 刺激 図2.6 実験に用いた刺激の模式図 実物体と複合的に提示した実験2では提示する刺激は実験1(実物体無し)で用いたもの を使用した. ただし提示する刺激の周りに実物体の積み木を設置した環境で実験を行った. 実験 2(実物体あり)のサイズ整合条件の実験環境を図2.11に示す. 同様に図 2.12, 図2.13 に実物体と複合的に提示した実験2のサイズ強調条件, サイズ不整合条件の実験環境を示す.
2.4 刺激 図2.7 24通りの刺激パターン 刺激を提示するためのマーカーについては12 cm × 12 cm の白塗りの正方形の中に 8 cm ×8 cm の黒枠で囲まれた図形を作成した. 実験に用いた刺激提示用のマーカーの例を 図2.14に示す. 1つの刺激に対して1個のマーカーが必要であるため, 24種類のマーカーを 作成した. 刺激の提示方法は1試行あたり10秒間提示した. ただし実験開始直後及び刺激 と刺激の間には5秒のブランクを挟んだ. このようにマーカーが表示される動画を作成し, iPad mini 上で再生した. 実験1では何も物が置かれていない机上に刺激を提示した. 一方実験2では, 図2.15に示
2.4 刺激
図2.8 実験1(実物体無し)のサイズ整合条件の刺激
図2.9 実験1(実物体無し)のサイズ強調条件の刺激
2.4 刺激
図2.11 実験2(実物体有り)のサイズ整合条件の刺激
図2.12 実験2(実物体有り)のサイズ強調条件の刺激
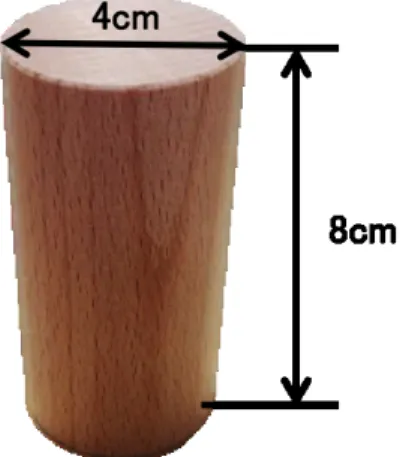
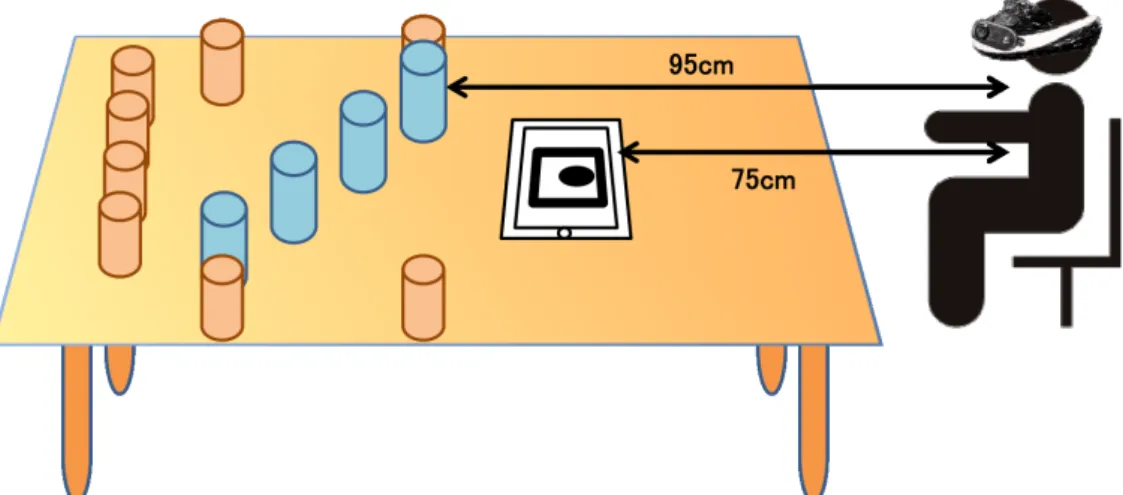
2.4 刺激 す直径4 cm, 高さ8 cmの円柱の積み木を実物体とし, 提示される刺激の周りに設置した. また, 提示した刺激は直径4.5 cm, 高さ12 cmの円柱をシミュレートしたものであり, 実物 体に用いた積み木より大きい. 実物体はあくまで刺激を提示する空間の奥行きを定義する ためのものであり, 実物体が妨害要因とならないように提示する刺激より小さいものを使用 した. 図2.14 刺激提示用マーカー
2.4 刺激
2.5 手続き
2.5
手続き
実験は初めに操作方法及び, 実験内容について理解するために10試行の練習試行を行っ た. その後被験者の体調等を考慮し,休憩の時間は被験者自身が決定した上で, サイズ整合条 件, サイズ強調条件,サイズ不整合条件の実験を行った. 被験者による回答はできるだけ早く かつ正確にという条件で実験を行った. 刺激の提示順序は図2.7に示す24通りを各条件に おいてランダムな順で提示した.2.5.1
実験
1(
実物体無し
)
実験1の詳しい手続きは以下である. 被験者は提示される刺激から95 cm 離れた位置に 着席した上で,カメラの付いたヘッドマウントディスプレイを装着し, 利き手は回答を入力 するテンキー置いた. 実験を開始すると奥行き位置が異なった4個の円柱が刺激として提示 される. 提示された刺激には左から順に1から4の番号が振ってあり, 被験者は最も手前に 見える円柱の順に4個の円柱の番号をテンキーで入力した. 入力が終了した合図として, 回 答の最後に0を入力した. これを1試行として1条件あたり24試行繰り返し, 計3条件分 実験を行った. また, 順序効果を避けるためにサイズ条件はカウンターバランス取り,奥行き 位置はランダムな順とした. 図2.16に模式図を示す. この時の回答時間及び回答番号を記録 した.2.5.2
実験
2(
実物体有り
)
実験2では実験1と同様の刺激を使用した. ただし図2.17の示すように提示される刺激 の周りに実物体の積み木を設置した環境で実験を行った. 実験2の模式図を図2.18に示す. 被験者が行う手続きは実験1と同じである. また,学習効果, 順序効果を避けるため被験者の 半分は実験1から, 残りの半分は実験2から先に行った. 同様にサイズ条件はカウンターバ ランスを取り,奥行き位置はランダムな順とした.2.5 手続き
図2.16 実験1模式図
2.5 手続き
第
3
章
実験結果
実験データの分析には被験者12名分のデータを使用した. ただし被験者の回答が間違い である試行については分析の対象から除外した.3.1
実験
1(
実物体無し
)
3.1.1
刺激提示から
4
個の物体全てを回答するまで
刺激が提示されてから4 個の物体全てを回答するまでにかかった回答時間, 正答率の結 果を図 3.1 に示す. 被験者ごとの回答までにかかった時間は表 3.1 に, 被験者ごとの正答 率は表3.2に示す. 回答までにかかった時間, 正答率のそれぞれに対してサイズの効果につ いて対応のある分散分析を行った結果, サイズ条件の正答率は高く, 有意な差は認められな かったが (F (2, 11), p = 0.182), 回答までにかかった時間について有意な差が認められた (F (2, 11) = 3.447, p < 0.05). 従って,奥行き判断に刺激の大きさ, 即ちサイズ差が影響を及 ぼすことが示された. また, 図3.1から見られるように強調した刺激のサイズ差がサイズ強 調条件では促進的効果, サイズ不整合条件では妨害的効果となった.3.1.2
刺激提示から
1
個目の物体を回答するまで
次に刺激が提示されてから1個目の物体を回答するまでにかかった回答時間について分 析を行った. 結果は図3.2に示す. 被験者ごとの回答までにかかった時間は表 3.3である. 回答までにかかった時間に対してサイズの効果について対応のある分散分析を行った結果,3.1 実験1(実物体無し) 図3.1 実験1(実物体無し) 結果 サイズ条件の回答までにかかった時間において有意な差が認められた (F (2, 11) = 5.357, p < 0.05). 従って, 刺激が提示されてから1個目の物体を回答するまでの奥行き判断に刺 激の大きさ, 即ちサイズ差が影響を及ぼすことが示された. また, 第3.1.1節と同様に強調 した刺激のサイズ差がサイズ強調条件では促進的効果, サイズ不整合条件では妨害的効果と なった.
3.1 実験1(実物体無し) 表3.1 実験1(実物体無し) 被験者ごとの回答時間 (秒) 回答時間(秒) サイズ整合条件 サイズ強調条件 サイズ不整合条件 被験者A 3.10 3.13 3.23 被験者B 4.23 4.31 4.86 被験者C 4.01 3.59 3.50 被験者D 4.10 4.23 4.55 被験者E 5.19 4.84 4.95 被験者F 4.40 4.43 4.63 被験者G 3.11 3.12 2.90 被験者H 3.32 3.15 3.56 被験者I 3.18 3.33 3.66 被験者J 4.47 3.48 4.25 被験者K 3.10 2.74 3.26 被験者L 3.29 3.14 3.06
3.1 実験1(実物体無し) 表3.2 実験1(実物体無し) 被験者ごとの正答率 (%) 正答率(%) サイズ整合条件 サイズ強調条件 サイズ不整合条件 被験者A 95.83 91.67 100 被験者B 91.67 100 91.67 被験者C 95.83 95.83 100 被験者D 100 100 100 被験者E 95.83 95.83 100 被験者F 91.67 100 91.67 被験者G 95.83 100 95.83 被験者H 95.83 100 95.83 被験者I 95.83 95.83 100 被験者J 87.50 100 91.67 被験者K 87.50 87.50 91.67 被験者L 100 95.83 100
3.1 実験1(実物体無し)
3.1 実験1(実物体無し) 表3.3 実験1(実物体無し) 被験者ごとの回答時間(刺激提示-1個目まで) (秒) 回答時間(秒) サイズ整合条件 サイズ強調条件 サイズ不整合条件 被験者A 2.46 2.52 2.58 被験者B 2.82 2.77 3.29 被験者C 2.57 2.17 2.21 被験者D 2.45 2.52 2.68 被験者E 2.96 2.85 2.96 被験者F 2.61 2.72 2.99 被験者G 2.08 2.05 1.90 被験者H 2.13 1.99 2.40 被験者I 2.05 2.05 2.25 被験者J 3.00 2.44 2.97 被験者K 2.12 1.90 2.40 被験者L 2.55 2.33 2.29
3.2 実験2(実物体有り) 図3.3 実験2(実物体有り) 結果
3.2
実験
2(
実物体有り
)
3.2.1
刺激提示から
4
個の物体全てを回答するまで
実験2では実物体と複合的に提示した環境を想定し, 積み木を実物体として刺激の周り に設置した環境で実験を行った. 実験の結果は以下である.実験1と同様に刺激が提示され てから 4個の物体全てを回答するまでにかかった回答時間, 正答率の結果を図3.3に, 被験 者ごとの回答までにかかった時間を表3.4に示す. また, 被験者ごとの正答率は表3.5であ る. 回答までにかかった時間及び正答率のそれぞれに対してサイズの効果について対応の ある分散分析を行った結果, 有意な差は認められなかった(F (2, 11), p = 0.405 ; F (2, 11), p = 0.442). 即ち実物体と複合的に提示することで, 提示した刺激のサイズ変化が実物体と 等しくなくなるために, 実物体がない実験1で見られたサイズ差の強調の促進的効果が消失 した.3.2 実験2(実物体有り) 図3.4 実験2(実物体有り) 結果(刺激提示-1個目まで)
3.2.2
刺激提示から
1
個目の物体を回答するまで
次に刺激が提示されてから1個目の物体を回答するまでにかかった回答時間について実 験1同様に分析を行った. 回答までにかかった時間に対してサイズの効果について対応のあ る分散分析を行った結果, サイズ条件に有意な差は認められなかった(F (2, 11), p = 0.371). 結果は図3.4に示す. また, 被験者ごとの回答までにかかった時間は表3.6である. また, 第 3.2.1節と同様に実物体と複合的に提示することで, 提示した刺激のサイズ変化が実物体と 等しくなくなるために, 実物体がない実験1で見られたサイズ差の強調の促進的効果が消失 した.3.2 実験2(実物体有り) 表3.4 実験2(実物体有り) 被験者ごとの回答時間 (秒) 回答時間(秒) サイズ整合条件 サイズ強調条件 サイズ不整合条件 被験者A 3.09 2.96 2.94 被験者B 4.59 4.79 4.87 被験者C 4.17 3.80 3.80 被験者D 4.19 4.53 4.70 被験者E 4.68 5.38 5.47 被験者F 4.32 4.13 4.62 被験者G 3.31 3.18 4.37 被験者H 3.56 3.52 3.52 被験者I 3.29 3.45 3.39 被験者J 3.50 3.80 3.22 被験者K 3.36 3.47 3.12 被験者L 3.48 3.82 3.41
3.2 実験2(実物体有り) 表3.5 実験2(実物体有り)被験者ごとの正答率 (%) 正答率(%) サイズ整合条件 サイズ強調条件 サイズ不整合条件 被験者A 95.83 95.83 91.667 被験者B 100 100 100 被験者C 95.83 100 100 被験者D 100 95.83 95.83 被験者E 79.17 100 100 被験者F 95.83 87.50 100 被験者G 95.83 95.83 100 被験者H 100 100 100 被験者I 95.83 83.33 95.83 被験者J 95.83 95.83 91.67 被験者K 91.67 70.83 91.67 被験者L 100 100 100
3.2 実験2(実物体有り) 表3.6 実験2(実物体有り) 被験者ごとの回答時間(刺激提示-1個目まで) (秒) 回答時間(秒) サイズ整合条件 サイズ強調条件 サイズ不整合条件 被験者A 2.48 2.38 2.31 被験者B 2.70 2.91 3.04 被験者C 2.62 2.36 2.45 被験者D 2.39 2.60 2.63 被験者E 2.78 3.06 3.13 被験者F 2.55 2.58 2.98 被験者G 2.30 1.98 2.79 被験者H 2.36 2.36 2.34 被験者I 2.10 2.33 2.28 被験者J 2.30 2.60 2.15 被験者K 2.30 2.50 2.11 被験者L 2.60 2.78 2.58
3.3 実験1, 実験2の比較 図3.5 実験1(実物体無し),実験2(実物体有り) 結果
3.3
実験
1,
実験
2
の比較
実物体がない環境の実験1, 実物体と複合的に提示した環境の実験2において奥行き判断 に提示する刺激の大きさが影響を及ぼすかについて検討を行った. 次に実験によって得られ た結果から実物体の有無が奥行き判断に影響を及ぼすかについて分析を行った. 実験1, 実 験2の両方をまとめた結果を図3.5に示す. 刺激を提示してから4個の物体全てを回答する までにかかった回答時間, 刺激の提示から1個目の物体を回答するまでの時間, 正答率に対 してそれぞれサイズの効果と実物体の有無について2要因の対応ありの分散分析を行った結 果, 回答までにかかった時間及び正答率の両方において実験1と実験2の実物体の有無の有 意な効果は認められなかった(F (2, 11), p = 0.324). 従って, 実物体の有無は奥行き判断に は影響を及ぼさないことが示された. 実物体の有無が奥行き判断に影響を及ぼすかについて 有意な差は認められなかったが, 図3.5から見られるように実物体と複合的に提示した実験 2の方が実物体がない場合の実験1と比べ, 回答に時間を要する傾向があった.第
4
章
考察
本研究の実験結果では実物体が存在せず, 提示する刺激がARのみの環境において刺激の 大きさが奥行き判断に影響を及ぼし, 強調した刺激のサイズが奥行き判断に促進的効果およ び妨害的効果をもたらすことが示された. 特にサイズ強調条件とサイズ不整合条件の間に差 がみられた. これはサイズ不整合条件の刺激が手前にある物体ほど小さく, 距離が離れるに 従って物体も大きくなる条件であるのに対して, サイズ強調条件は逆に手前にある物体ほど 大きく, 離れるに従って小さくなっていることが原因であると考えられる. この結果を私た ちの日常生活に置き換えてみると, 近くにいる人より遠くにいる人の方が網膜上では小さく 知覚される[4]. この状況に近いサイズ強調条件は回答までにかかった時間, 正答率ともに成 績が良いことが図 3.1から示される. 一方, 全く逆の提示手法であるサイズ不整合条件では サイズ強調条件と比較して成績が悪い. この状況は日常生活で接することが少ない条件のた めに判断に時間を要したのではないかと考えられる. これらの理由から実験1の条件間に有 意な差が認められ, 提示する刺激の大きさが奥行き判断に影響を及ぼす結果になったと考え る. 実験 2では提示するARの刺激に加え, 実物体を設置した複合的な環境で実験を行った. 実験の結果, 回答までにかかった時間, 正答率において有意な差は認められなかった. これは 実物体の設置された環境においては, 刺激の大きさが異なっている場合でも刺激の大きさに 影響を受けずに奥行き判断を行うことが可能であると考えられる. 実物体と複合的に提示し た実験2では, 実物体として用いた積み木は全て同じ大きさのものを使用したため, 手前の ものは大きく, 遠くのものは小さく目に映る. また, 人間はリアルなものに注意が向く傾向 があると考えられるため, 手前のものが大きく遠くのものは小さいという条件が奥行き判断の手がかりとなる. しかし, 提示した刺激はサイズ差が強調してあり, 同一サイズではない. 従って, 実物体の網膜上での遠近法的特性と異なる提示をした刺激は元々大きかったものと して知覚される. その結果, 手前のものは大きく遠くのものは小さいという奥行き判断の手 がかりが崩れ, 提示した刺激のサイズ差の強調の促進的効果が消失したため, 有意な差が認 められなかったと考えられる. この結果より, 提示する刺激のサイズ差を奥行き判断の手が かりだけに用いるのではなく, システムを使用している人に注目して欲しい情報, 注意を向 けたい情報に提示する刺激のサイズ差を使用することができるのではないかと考える. 例え ば, システムの利用者が最も取得したい情報は提示するサイズを大きくし, 補足情報的な意 味合いで提示する情報は小さくすることでサイズ差を用いた情報提示手法を行うことが可能 であると考える. 実物体がない場合の実験1と実物体と複合的に提示した実験2を比較した結果, 回答まで にかかった時間と正答率に有意な差は認められなかった. この結果は実物体の有無が奥行き 判断に影響するとはいえないことを示している. しかし図3.5から見られるように実物体を 設置した実験2の方が実験1に比べ回答までにかかった時間が遅い傾向にある. このような 傾向に至る原因は定かではないが, サイズが手がかりにならないからであると考えられる. 従って, 実物体の形, 設置する位置等を再検討して実験を行うことで実物体がない場合より 回答までにかかった時間が遅くなる原因を明らかにすることが可能ではないかと考える. し かし, 今回の結果のように実物体を設置することで, 実物体がない場合と比較して回答まで にかかった時間が遅くなる妨害要因となる場合も考えられる. そこで, 実物体との奥行き関 係については今後引き続き, さらなる研究を行う必要がある. 今回の実験では回答までにかかった時間において有意な差が認められたが, 正答率につい ては有意な差は認められなかった. この原因として全被験者の正答率が高かったことが挙 げられる. 表3.2 , 表3.5から読み取れるようにほとんどの被験者の正答率は100%ないし 90%前後に集中している. これは実験中に回答を間違えた試行数が1条件あたり平均で2か ら3試行であることを示している. このような結果となった理由として, 刺激の提示時間が 長かったことが考えられる. 刺激の提示時間が10秒間と長いことにより, 時間をかけて提示
された刺激を観察しながら正確な判断が可能になるためと予想される. 判断の誤りから事故 につながる場合は一瞬の判断ミス等が原因となることが多い. 従って刺激の提示時間を短く することで瞬時の奥行き判断について検討することが可能になると考える. また, 本研究で は提示する刺激の大きさ, および実物体の有無が奥行き判断に影響を及ぼすかの検討を行う ために, 提示する刺激の影や輪郭など他の奥行き手がかりとなるものを制限した上で実験を 行った. しかし, 今回の実験環境は机を繋ぎ合わせて広いスペースを確保したため,机と机の 境界が遠近法的奥行き手がかりとなった場合が考えられる. 今後は厳密な実験結果を得られ るように研究対象ではない奥行き手がかりを排除した環境で実験を行う必要がある. 今回の実験では机上で実験を行うことが可能なスケールであったが, さらに現実的な利用 を想定すると屋外等で樹木や建築物を実物体として実験を行う必要がある. 視差の有無も重 要な奥行き手がかりとなる場合も考えられる. 視差をつけることで奥行き判断は視差が手が かりとなるため, さらに容易になると予想される. そこで本研究ではサイズ差が奥行き判断 の手がかりとなったが, 奥行き判断の手がかりだけにサイズ差を利用するのではなく, シス テムの利用者に注目して欲しい情報にサイズ差を利用していくことが可能ではないかと考 える.
第
5
章
まとめ
今後ウェアラブル端末, AR技術が普及し, より身近なものになると予想される. 従って, 屋外での使用する機会も増加すると考えられる. しかし, 提示したヴァーチャルな情報が原 因となり物体の奥行き判断を誤る可能性も考えられる. そこで本研究ではウェアラブル端末 の一種であるヘッドマウントディスプレイ(HMD)を使用したウェアラブルARシステムを 構築し, 提示する刺激の大きさ及び実世界に存在するオブジェクトが奥行き位置判断に影響 を及ぼす効果の検討を行った. 実験の結果, 実物体がない場合において被験者の回答までにかかった時間に有意な差が認 められ, 提示する刺激の大きさが奥行き判断に影響を及ぼすことが示された. また,強調した 刺激のサイズ差がサイズ強調条件では促進的効果, サイズ不整合条件では妨害的効果となっ た. 実物体と複合的に提示した場合,有意な差は認められず, 提示した刺激が各奥行き位置の 実物体のサイズ変化と等しくなくなるため, サイズ差の強調効果が消失した. これより,実物 体と複合的に提示する際は単なるサイズ差の強調を行うことで奥行き判断が必ずしも促進さ れる訳ではないことに注意する必要がある. また, 第4章で述べたが実際にこのシステムを日常生活の中で使用する場合, 瞬時の奥行き 判断が重要になると考えられるため, 刺激の提示時間を一瞬にして実験を行う必要がある. そこで今後引き続き視差の有無も含めた, より実際の利用に近い条件で研究を続ける.謝辞
本研究, 論文を作成するにあたり, 多くのご支援と熱心なご指導を賜りました繁桝博昭先 生に深謝いたします. また, 本論文の副査を務めて頂いた妻鳥貴彦先生, 松崎公紀先生に感謝 いたします. 実験を行うにあたって快く被験者を引き受けて頂いた繁桝研究室の皆様, 他研 究室の皆様, そして適切なアドバイスを頂いた門田宏先生に心より感謝いたします. ありが とうございました.参考文献
[1] 総務省, “スマートフォン等の急速な普及と端末市場の変化”, H24年度版 情報通信白書, http://www.soumu.go.jp/johotsusintokei/whitepaper/ja/h24/html/nc122110.html, 2014年2月20日閲覧. [2] 浦谷謙吾, 町田貴史, 清川清, 竹村治雄, “AR 環境における奥行き曖昧性と視認性を考 慮した注釈提示手法とその評価”, 映像情報メディア学会技術報告 28(6), 47-52, 2004. [3] 堀田あいら, 佐々木隆, 奥村治彦, “動的奥行き手がかりを用いた単眼ヘッドアップディ スプレイの奥行き知覚効果”,映像情報メディア学会誌 Vol.66 No. 10 pp. J331-338, 2012. [4] 横澤一彦, “視覚科学”, 2010. [5] 小田島太郎, 神原誠之, 横矢直和, “拡張現実感を用いた屋外型ウェアラブル 注釈情報 提示システム”, 電子情報通信学会技術研究報告. PRMU, パターン認識・メディア理解 102(554), 73-78, 2003. [6] 藤本雄一郎 , 山本豪志朗 , 武富貴史 , 宮崎純 , 加藤博一, “拡張現実感における情報提 示の特性とユーザの記憶効率の関連性”, 日本バーチャルリアリティ学会論文誌 18(1), 81-91, 2013. [7] 天目隆平, 神原誠之, 横矢直和, “拡張現実感技術を用いたウェアラブル型注釈提示シス テム”, 電子情報通信学会総合大会講演論文集2002年 基礎・境界, 366, 2002.[8] Ronald T. Azuma, “A Survey of Augmented Reality”, Presence: Teleoperators and Virtual Environments 6, 4, pp. 355-385 1997.
[9] 谷尻豊寿, “拡張現実感を実現するARToolkitプログラミングテクニック”, 2008. [10] 佐野彰, “AR入門-身近になった拡張現実”, 2013.
[11] “ARToolKit を 使った 拡 張 現 実 感 プ ロ グ ラ ミ ン グ-工 学 ナ ビ”, http://kougaku-navi.net/ARToolKit/
参考文献
[12] 橋本直, “3Dキャラクターが現実世界に誕生! ARToolkit拡張現実感プログラミング入
門”, 2008.