Title
床反力中心制御による2足歩行系両脚支持期の重心移動( 本
文(Fulltext) )
Author(s)
伊藤, 聡; 浅野, 博紀; 川﨑, 晴久
Citation
[日本ロボット学会誌 = Journal of Robotics Society of Japan]
vol.[22] no.[4] p.[535]-[542]
Issue Date
2004-05-15
Rights
The Robotics Society of Japan (日本ロボット学会)
Version
出版社版 (publisher version) postprint
URL
http://hdl.handle.net/20.500.12099/27735
学術 ・技 術 論 文
床反 力中心制御 による2足 歩行系両脚支持 期の重心移動
伊 藤 聡*1*2浅 野 博 紀*1川R晴 久*1
A Weight
Shift
by Control
of Center
of Pressure
of Ground
Reaction
Forces
in Biped
Double
Support
Phase
Satoshi Ito*l *2, Hironori Asano*l and Haruhisa Kawasaki*l
In this paper, we consider the weight shift in biped double support phase under variable environment. In
conven-tional method, motion pattern of body parts that leads the center of mass or center of pressure of ground reaction
forces to the desired position is planned first, and then execute position al feedback against it. This indirect method
causes problems such that the planned motion pattern is not suitable, or how this pattern should be modified, for
the varied environment. Here, we show that, by selecting the center of pressure as the controlled variable, not only
the motion planning of body part becomes unnecessary, but also the motion pattern automatically changes with
the environmental conditions. The stability of the control method is discussed and its validness is examined by
simulations and robot experiments.
Key Words: Biped Robot, Double Support Phase, Center of Pressure, Ground Reaction Forces, Environmental
Changes
1.は じ め に 2足 歩 行 系 に お い て平 衡 の 制 御 は 重 要 な 課 題 で あ る.平 衡 の と れ た歩 行 を 計 画 す る た め に 考 え 出 され た の がZMP(Zero Mo-mentpoint)[1]の 概 念 で あ る.ZMPと は慣 性 力 と重 力 の 作 る モ ー メ ン トが 零 と な る よ う な床 面 上 の 点 で あ る.関 節 軌 道 を設 計 す る と慣 性 力 が 計 算 で き る た め,運 動 時 の 各 瞬 間 でZMPが どの 位 置 に く る か が 計 算 で き る.単 脚 支 持 期 の 場 合,足 部 が 運 動 し な い と仮 定 し て計 算 し たZMPが 足 底 の 外 部 に 出 て し ま う な ら ば,そ の 関 節 軌 道 に従 っ た 運 動 で は 足 部 の 縁 まわ りで 回 転 を 起 こ す.つ ま り,足 部 の 接 地 状 態 す な わ ち 足 裏 全 体 で の 面 接 触 が 維 持 さ れ な い.こ の 状 態 で の 回 転 中心 に は ア クチ ュ エ ー タ や セ ン サ は存 在 せ ず,通 常 制 御 が 難 し くな り,歩 行 ロ ボ ッ トの 場 合 は こ の 状 態 に な る の を避 け る こ とが 多 い.現 在,多 くの 歩 行 ロ ボ ッ トで は,ZMPが 足 底 内 部 に常 に 留 ま る よ う に 歩 行 運 動 の 軌 道 計 画 を 行 い,歩 行 時 に は そ の 軌 道 に 対 す る 位 置 の フ ィー ドバ ッ ク制 御 を 行 っ て い る[2][3].こ の 有 効 な 方 法 が,ロ ボ ッ ト の2足 歩 行 技 術 に発 展 を も た ら した とい え る. しか し,こ の 方 法 で はZMPの 制 御 に 関 して は フ ィー ドフ ォ ワ ー ド的 で あ り,実 際 にZMPの 位 置 を計 測 し て そ の情 報 を も と に 関 節 トル ク を決 定 して い る わ け で は な い.し た が っ て,パ ラ メ ー タの 誤 差 や 環 境 の 変 化 に よ り,ZMPが 目標 位 置 に 制 御 さ れ て い る と は 限 ら な い.近 年,ZMPの 位 置 を計 測 し,そ の 情 報 に よ り計 画 した 運 動 の 目標 軌 道 を修 正 す る 方 法 が 提 案 され て い る[4]∼[6].し か し,制 御 に よ る振 舞 い の 理 論 的 考 察,特 に 安 定 性 の 解 析 は 十 分 で は な い. 本 稿 で は,い か に し た ら環 境 が 変 化 して も平 衡 の とれ た 運 動 が で きる か を問 題 と す る.こ れ を解 決 す る に は,床 反 力 が 重 要 で あ る と考 え た.特 に 床 反 力 中心(CoP:Center of Pressure) は平 衡 に重 要 な指 標 と な るZMPと 一 致 す る[7]こ と か ら,CoP を被 制 御 量 †と して 選 ぶ 方 法 を提 案 す る.我 々 は,2足 歩 行 の 直 立 姿 勢 に 関 し,床 反 力 に 基 づ い た制 御 法 を提 案 し て きた[8】.そ こ で は 矢 状 面 内 に 運 動 が 限 定 さ れ た2リ ン ク モ デ ル で 踵 と爪 先 で の2点 接 地 を 仮 定 し,そ の2点 で の 床 反 力 の 垂 直 成 分 の 差 が 一 定 と な る よ う に 制 御 す る こ と で,一 定 外 力 に 応 じた 直 立 姿 勢 の 変 化 を 実 現 し て い る.こ の 制 御 の 特 徴 は,定 常 時 の 姿 勢,つ ま り上 体 の 傾 きが 外 力 の 大 き さ に よ っ て 適 応 的 に 変 化 す る こ と で あ る.本 稿 で は こ れ を拡 張 し,CoPを 新 し く被 制 御 量 と して そ れ を フ ィ ー ドバ ッ ク制 御 す る こ と に よ り,環 境 変 化 に応 じ て 変 化 す る よ う な 振 る 舞 い を実 現 す る こ と を 目 的 とす る. こ の よ う な 問 題 の 枠 組 み が 応 用 で き る 例 と し て は,両 脚 支 持 期 の 重 心 移 動 が あ る.単 脚 支 持 期 で は,遊 脚 を前 に 振 り出 す と 原 稿 受 付2003年6月10日 *1岐 阜 大 学 工 学 部 *2理 化 学 研 究 所 バ イ オ ・ ミ メ テ ィッ ク コ ン ト ロ ー ル 研 究 セ ン タ ー *1Faculty of Engineering ,Gifu University *2Bio -mimetic control resear chcenter,RIKEN
†本 論 文 で は 以 後ZMPを 床 反 力 中心(CoP:Center of Pressure)と 呼 称 す る.
536伊 藤 聡 浅 野 博 紀 川 崎 晴 久 同 時 に 支 持 脚 で 地 面 を後 方 に 蹴 る 動 作 が 伴 う.こ れ に は 必 然 的 に そ の よ う な運 動 を させ る た め の 軌 道 計 画 が 必 要 と な る.そ れ に対 し両 脚 支 持 期 で は,そ の 主 な 役 割 は,平 衡 を保 ち な が ら重 心 を 新 しい 支 持 脚 の 上 に 載 せ る こ と で あ っ て,ど の 位 置 に ど の 部 位 を運 ぶ とい う よ う な 動 作 そ の も の が 具 体 的 に 決 ま っ て い る わ け で は な い.つ ま り実 質 的 な 目標 はCoPを 支 持 脚 の 足 裏 に 移 動 させ る こ とで あ り,そ の 意 味 で はCoPを 被 制 御 量 と して と る こ とが 妥 当 とな る.し か し,従 来 の ア プ ロ ー チ で は,CoPが 移 動 で き る よ う な 上 体 の 運 動 を計 画 し,そ れ を 実 現 す る よ う な 位 置 制 御 を行 う.こ の よ う な 間 接 的 な 手 段 を とる た め,環 境 変 化 に よ っ て 計 画 した 運 動 が 合 わ な く な っ た り,そ れ を修 正 し直 した りす る 問 題 が 生 じ る.こ こ で は,CoPを 直 接 制 御 す る こ と で 上 体 運 動 の 目標 軌 道 が 不 要 と な る ば か りで な く,そ の 運 動 が 環 境 に 応 じて 自動 的 に 変 化 す る こ と を示 す.そ して,こ れ ま で に提 案 さ れ て い るZMPの フ ィー ドバ ッ クで は 十 分 な され て こ な か っ た 制 御 方 法 の 収 束 性 に つ い て議 論 す る. 歩 行 ロ ボ ッ トの 研 究 に は,ロ ボ ッ トに 歩 行 を行 わ せ る こ とで ヒ トの 歩 行 原 理 を解 明 し よ う とい う側 面 も あ る.本 研 究 で は 環 境 変 化 に対 し て も平 衡 が 保 た れ る安 全 な 歩 行 を 目 指 し,ヒ トの 歩 行 原 理 を 解 明 す る こ と に は 重 点 を お か な い. 2.床 反 力 に 基 づ く 直 立 姿 勢 制 御 最 初 に 本 稿 で の ア プ ロ ー チ が 基 本 と す る 文 献[8】 の 床 反 力 制 御 に 基 づ い た平 衡 維 持 法 に つ い て 簡 単 に述 べ て お く.そ こ で 設 定 して い る 仮 定 は 以 下 の よ うで あ る.直 立 姿 勢 の 制 御 で は,小 さ い摂 動 に 対 し て は 足 関 節 を 使 用 し て 平 衡 を保 つ こ とが 知 ら れ て い る(ankle strategy[13]).こ れ は 最 も単 純 に は,Fig.1に 示 す よ う に,2足 歩 行 系 を胴 部 と足 部 か ら な る2リ ン ク系 と し て 表 現 で き る.な お 運 動 は 矢 状 面 に 限 定 して い る.足 部 の 形 状 は前 後 に対 称 で,足 関 節 は足 部 中 央 の 高 さ0の 位 置 に あ る もの と仮 定 す る.ま た足 部 は 地 面 と2点 で 接 地 し,接 地 点 で の 垂 直 方 向 の 床 反 力 の 大 き さが 測 定 で き る とす る.ま た,足 関 節 で は, 角 度 と 角 速 度 が 測 定 で き,適 切 な トル ク が 出力 で き る.環 境 か らの 影 響 を考 え る た め,そ れ を重 心 に働 く外 力 と して 表 現 す る. 外 力 は 一 定 で あ る と仮 定 す る. 平 衡 が 保 た れ て い る と き足 部 に運 動 は 起 きず,胴 部 の み が I〓 =MLgSinθ+ExLCOSθ-FyLsinθ+〓 Fig.1Link model =ALsin(θ-θf)+〓(1) に従 っ て 運 動 す る.こ こ で,Mは 胴 部 の 質 量,1は 足 関 節 回 り の 胴 部 の 慣 性 モ ー メ ン ト,Lは 足 関 節 と胴 部 重 心 間 の 距 離,θ は 床 面 に対 し て垂 直 な 方 向 か ら の 胴 部 の 角 度,Tは 足 関 節 トル ク, gは 重 力 加 速 度,Fxお よ びFyは そ れ ぞ れ 外 力 の 水 平 お よ び 垂 直 成 分,Aは 胴 部 重 心 に か か る 外 力 と重 力 の 合 力 の 大 き さで 〓(2) で あ り,そ の 方 向 は 次 式 を示 す θfに よ っ て 表 さ れ る. 〓(3) ま た,接 地 点 まわ りの モ ー メ ン トの 釣 り合 い よ り足 関節 トル ク と 2つ の 接 地 点 にお け る 床 反 力 の 垂 直 成 分 、FH,FTと の 関 係 が, 〓(4) 〓(5) で 与 え られ る.こ こ でmは 足 部 の 質 量,ぞ は 足 関節 か ら接 地 点 まで の 距 離,fyは 上 体 か ら作 用 す る 力 で 〓(6) で あ る. こ こ で の 目 的 は,外 力 に か か わ ら ず 転 倒 し な い よ う に 平 衡 を 維 持 す る こ とで あ る.こ れ はFTお よ びFHを 共 に正 に 保 て ば 達 成 さ れ る.し か し,定 常 状 態 に置 い て はFTとFHが 等 しい 値 を と る こ とが,安 定 余 裕[14]の 観 点 か ら は 望 ま しい.そ こ で 定 常 状 態 に お い てFT=FHが 達 成 さ れ る よ う足 関 節 トル クT を 以 下 の 式 で 与 え る. 〓(7) こ の と き,Fig.1右 図 の よ う に 外 力 と重 力 が 釣 り合 う よ う な 姿 勢 が 定 常 状 態 と な り,そ の 安 定 性 は フ ィー ドバ ッ ク ゲ イ ンKd, KPお よ びKfが 条 件 Kp>AL>0(8) 〓(9) 〓(10) を満 た す よ う に 選 ぶ こ と に よ り局 所 的 に保 証 さ れ る.証 明 は 文 献[8]を 参 照 され た い.な お,定 常 状 態 で の 姿 勢 が 外 力 に よ っ て 変 化 す る こ と に 注 意 す る.
3.両
脚 支 持 期 の 重 心 移 動
3.1問
題設 定 およ び仮 定
両脚 支持期 の重 心移 動が必 要 な例 と して,歩 行 の開始 時 の制
御 があ る.歩 行 開始 時 は通常両 脚 で支持 されて お り,左 右 の両
足 に均 等 に体 重 がか か ってい る.そ の状 態か ら歩 行の ため の一
歩 を踏 み 出す には,一 方 の脚 を前 に振 り出せ る拘 束 を受け ない
自由 な状態 とす る よ うに,左 右 の脚 の どちらか一 方 に全体重 を
床 反力 中心制御 に よる2足 歩行系両脚支持期の重心移動537
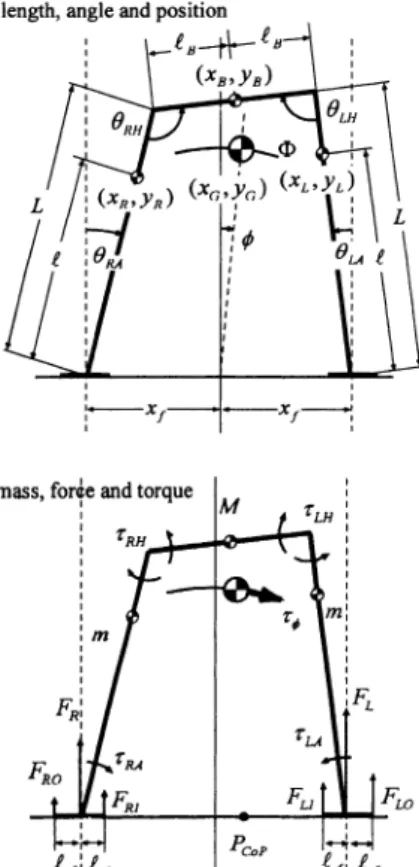
Fig. 2 Model for double support phase in the frontal plane
移 動 させ る 必 要 が あ る.こ う よ う な観 点 か ら,本 稿 で は まず 両 脚 支 持 期 で の 重 心 移 動 を 前 額 面 内 の 運 動 に 限 定 して考 え る. 両 脚 支 持 期 で の ダ イナ ミ ク ス を 考 慮 す る た め,Fig.2に 示 す よ う な 胴 部,脚 部,足 部 か ら な る5リ ン ク の モ デ ル を 用 い る. こ の 運 動 は 膝 を伸 ば した ま ま 行 わ れ る 場 合 が 多 い た め,脚 部 は 1リ ン ク と み なす.左 右 の 足 関 節 は 足 部 中 央 の 高 さ0の 位 置 に あ る と仮 定 す る.足 部 は左 右 両 端 の2点 で 床 面 と接 地 し,そ こ で の床 反 力 の 垂 直 成 分 が 測 定 で きる もの と す る.ま た,足 関 節 と股 関 節 の 角 度 と 角 速 度 が 測 定 で き,そ れ ぞ れ の 関 節 で トル ク が 出 力 で き る. 両 脚 支 持 期 の 重 心 移 動 に お け る制 御 目標 は,体 重 が 床 面 上 の 目標 位 置 に か か る よ うに 上 体 を動 か す こ とで あ る.こ こ で は,外 力 の 影 響 を考 慮 して 上 体 の 運 動 を計 画 す る の で は な く,床 反 力, よ り厳 密 に はCoPそ の も の を 直 接 被 制 御 量 と す る ア プ ロ ー チ を と る. 3.2制 御 方 法 両 脚 支 持 期 で は,足 部 の 接 地 状 態 は 維 持 さ れ る.上 体 の 機 構 は 閉 リ ン ク と な り,実 際 に運 動 す る の は 胴 部 と両 脚 部 の3リ ン ク で あ るの で,そ の 運 動 は1自 由 度 とな る.前 章 で の 制 御 法(7) も1自 由 度 の 胴 部 の 運 動 に対 す る 制 御 法 で あ っ た た め,そ れ を 拡 張 す る こ と を考 え る. 前 章 の 問 題 設 定 と の 大 き な違 い は,重 心 移 動 と い う動 的 な 制 御 を 目 的 と し て い る点 で あ る.し か し,こ れ は 静 的 平 衡 点 の 局 所 安 定 性 に 基 づ き,そ の 目 標 値 を ゆ っ く り と変 化 させ る こ とに よ っ て実 現 す る こ と に す る.そ れ 以 外 に,接 地 点 の 数 が 多 い こ と,重 心 軌 道 が 円 弧 とな ら な い こ と,ま た,ト ル ク の 生 成 が 冗 長 と な る こ と の 三 つ の 違 い が 問 題 と な る.そ れ らの 違 い を 解 決 で き る よ う,制 御 方 法 を以 下 で拡 張 し て い く. 3.2.1床 反 力 中 心 に よ る記 述 接 地 点 の 数 の 違 い は,式(7)を 応 用 す る 上 で 大 き な 問 題 と な る.そ れ は 式(7)が 接 地 す る2点 で の 垂 直 床 反 力 の 差 に 基. つ い た も の で あ る か らで あ る.4点 接 地 の 場 合 に 拡 張 す る た め , CoPが 被 制 御 量 とな る よ う式(7)を 書 き換 え る.CoPは 床 反 力 が 床 面 の 一 点 で 働 く とみ な した と き の 作 用 点[7]で,そ の 点 周 りで の 床 反 力 の 垂 直 成 分 が 作 る モ ー メ ン トは 零 と な る.こ の 性 質 に よ る とFig.1のCoPの 位 置PcoPは, 〓(11) で 表 現 で き る.PcoPの 原 点 は 足 部 中 央 す な わ ち 足 関 節 と して い る.分 母 のFT+FHは 全 体 重 に相 当 し,直 立 姿 勢 維 持 の よ う に胴 部 の 動 き が 小 さ くゆ っ く りな 場 合 は 一 定 と考 え る こ とが で き る.そ こで,定 数Kwを 〓(12) の よ う に 定 義 し,上 式 に代 入 す る と 〓(13) と な る.こ の 関 係 を利 用 し,さ ら に床 反 力 中 心 を 目標 位 置Pd に制 御 で き る よ う式(7)を 書 き直 す と 〓(14) と な る.こ こ で 、〓 で あ る. 両 脚 支 持 期 で は,床 反 力 中心 の 位 置Pcopは 四 つ の 接 地 点 に お け る 床 反 力 の 垂 直 成 分FRO,FRI,FLo,FLIを 用 い て 次 の よ う に 計 算 で き る. 〓(15) Fall=FRO+FRI+FLI+FLO.(16) こ こで,下 付 き添 え字RO,RI,LIお よ びLOは そ れ ぞ れ接 地 点 の 位 置,す な わ ち 右 外 側,右 内 側,左 内 側 お よ び 左 外 側 を 表 し,ま たlfは 足 関 節 位 置 か ら同 じ足 の 接 地 点 ま で の 距 離,xf は 二 つ の 足 関 節 位 置 の 中点 か ら 各 足 関 節 まで の 距 離 で あ る.な お,Pcopの 座 標 系 の 原 点 は 左 右 の 足 関 節 の 中 点 で あ る. 3.2.2重 心 運 動 に対 す る 座 標 系 直 立 姿 勢 の モ デ ルFig.1に お い て は,胴 部 の 重 心 の 軌 道 は 足 関 節 を 中 心 とす る 円 弧 を描 く.し た が っ て,一 般 化 座 標 を足 関 節 の 角 度 とす れ ば 足 関節 の トル ク を そ の 一般 化 力 と定 義 で きた. 本 稿 で 考 え て い る両 脚 支 持 期 の 運 動 の 場 合 も運 動 自 由 度 が1 の た め,一 次 元 の 座 標 系 と して表 現 で きる.し か し,重 心 の 軌 道 は歩 隔 に よ っ て 変 化 し,必 ず し も円 弧 に な る と は 限 ら な い.し
538伊 藤 聡 浅 野 博 紀 川 崎 晴 久
たが って,そ の軌 道 を表 現す る座標 系 を適 切 に選ぶ必 要が あ る.
軌道上 におけ る重心 の座標 を φ とお く.φ の定義 に は,重 心
の水平 座標 や軌 道上 での弧 の長 さな ど,幾 通 りも表現方 法 があ
る.こ こでは,直 立姿 勢 モデ ルで の制御 の 自然 な拡 張 となる よ
う床面 に対 して垂直 な方 向か らの上 体重 心 の角度 で定義 す る.
〓(17) こ こで,(xG,yc)は 左 右 の 足 関 節 の 中 点 を原 点 と した 直 交 座 標 系 にお け る上 体 重 心 座 標 で あ る.こ の 定 義 に よ る と,も し歩 隔 が 股 関 節 間 の 距 離 と等 し く重 心 軌 道 が 円 弧 と な る 場 合,直 立 姿 勢 モ デ ル の 定 式 化 と一 致 す る.さ て,両 脚 の 足 関 節 角 度θRA, θ LAを 用 い る と,重 心 座 標 は 〓(18) 〓(19) の よ う に か け る.こ こ で,ρ は 〓(20)を満 た す定 数,Mお
よびmは
胴 部 お よび脚 部 の質量 で あ る.
これ よ り
〓(21) が 得 ら れ る が,式(17)を 比 較 す る こ と に よ り,φ は 〓(22) で 与 え られ る こ と に な る.こ の 新 し く定 義 した 重 心 軌 道 上 の 一 般 化 座 標 系 に 対 し,そ の 軌 道 の 接 線 方 向 に 働 く一般 力 を τφ を 式(7)と の 類 似 性 よ り 〓(23) と定 義 す れ ば,CoPは そ の 目標 値 に 制 御 で きる と期 待 で き る. 3.2.3ト ル ク の 分 配 式(23)で 定 義 さ れ た 一 般 化 力 τφ を実 現 す る よ う に,各 関 節 トル ク を い か に生 成 す る か につ い て 考 え る.そ れ に は,重 心 位 置 の 変 位 と 関 節 変 位 を 結 び つ け る ヤ コ ビ行 列 を 利 用 す る. 重 心 位 置 の 変 位 を △ φ,関 節 角 度 の 変 位 を △θ(θ= [θRA,θRH,θLH,θLA]T)と す る.こ こで,下 付 添 え字RA,RH, LH,LAは 関 節 を 区 別 し,そ れ ぞ れ 右 足 関 節,右 股 関 節,左 股 関 節,左 足 関 節 を 表 す.両 者 の 関 係 は ヤ コ ビ行 列J(θ)に よ っ て △ θ=J(θ)△ φ.(24) と書 け る. 前 項 の 一 般 化 座 標 の 定 義 に 従 う と,こ の ヤ コ ビ行 列J(θ)は 以 下 の よ う に 計 算 で き る.ま ず,式(22)に よ り 〓(25) が 得 られ る.ま た,幾 何 学 的 な 拘 束 よ り 〓(26) で あ る た め,こ れ を微 分 して 〓(27) とな る.ま た 閉 リ ン ク系 よ り右 股 関 節 の 座 標(xRH,yRH)に 対 し 〓(28) と2通 りの 記 述 が で き,こ れ を微 分 して 〓(29) を 得 る.四 つ の 変 数〓 に つ い て 式 (25),式(27),式(29)の4式 を解 く と 〓(30) 〓(31) 〓(32) 〓(33) と な る.こ の ヤ コ ビ行 列 を 用 い て,一 般 化 力 τφ と関 節 トル ク τ=[τ RA,τRH,τLH,τLA]Tと の 関 係 が 仮 想 仕 事 の 原 理 よ り導 か れ る. 〓(34) この 方 程 式 を解 くこ と に よ り,関 節 トル クが 〓(35) の よ う に 決 定 で き る.こ こ で(JT(θ))*はJT(θ)の 一 般 化 逆 行 列,pは 任 意 の 四 次 元 ベ ク トル で あ る. 3.3平 衡 状 態 も し股 関 節 が0<θRH,θLH<π の 範 囲 で の み 変 化 す る な ら ば,各 関 節 角 度 は 重 心 の 座 標 φ の 関 数 と し て,θ=θ(φ)と 書 け る.こ の と き 「重 心 の 軌 道 の 接 線 は 一 般 に は 床 面 に対 して 垂 直 な 方 向 を 向 か な い 」 こ と に 注 意 す る.そ し て 重 心 の 運 動 方 程 式 は φ を用 い て 〓(36) と記 述 で き る.こ こ で慣 性 に相 当す るM(θ)は 正 とな り,C(θ,〓)床 反力中心 制御に よる2足 歩行系両脚支持期の重心移動539 は〓 の 二 次 の 項 と な る.ま たGに は 重 力 だ け で な く一 定 外 力F=(Fx,Fy)が 含 まれ る.一 方,一 般 化 力 τφ に よ りCoPの 位 置 も変 化 し,そ の 関 係 は PCoP=P(θ)τ φ+Q(θ,〓)+R(θ,g,F)(37) で 表 され る.同 じ よ う にP(θ)は 正,Q(θ,〓)は〓iの 二 次 の 項, Rに は重 力 と一 定 外 力Fが 含 ま れ る.以 上 の2式 に対 し,制 御 入 力(23)に よ り達 成 さ れ る 平 衡 状 態 につ い て 考 察 す る.解 析 を 簡 単 に す る た め,床 反 力 中心 の 目標 値Pdは 定 数 と仮 定 し, ま た 新 しい 変 数τfを 〓(38) と定 義 す る.運 動 方 程 式(36)よ り M(θ)〓+C(θ,〓)+C(θ,g,F) 〓(39) が 得 られ る.一 方,τfを 微 分 す る と 〓f=Pd-PcoP(40) と な る が,Pcopに 式(37)を 代 入 す る と〓 〓(41) と な る.φ,φ お よ びτfを 状 態 変 数 と み な す と,上 式 で〓= 〓=〓f=0と お く こ とに よ り,平 衡 状 態〓 ,テ が得 られ る.こ こで 重 要 な こ とは,平 衡 状 態 で は〓f=0で あ る こ とで あ る .こ れ は,式(40)よ りPcop=Pdを 意 味 し,CoPが そ の 目標 値 と一 致 す る 状 態 が 平 衡 状 態 と な る. 3.4平 衡 状 態 の 安 定 性 平 衡 状 態 の 安 定 性 を調 べ る た め,式(39)と 式(41)を 平 衡 点(〓,0,〓f)の 周 りで 線 形 化 す る. 〓(43) こ こで,△ φ お よび △τφは そ れ ぞ れ の 平 衡状 態 か らの 変位 ,〓 で あ る.線 形 化 した 方 程 式 の 可 制 御 行 列 〓(44) が フ ル ラ ン ク に な れ ば,例 え ばLQ理 論 に よ りRiccati方 程 式 の 解 を用 い て 適 切 な フ ィー ドバ ッ ク ゲ イ ンKp ,Kdお よ びKf を決 め る こ とに よ り,平 衡 点 は 安 定 化 で き る.可 制 御 行 列 の 行 列 式 は 〓(45) を 用 い る と 〓(46) と な る.こ こ で 可 制 御 行 列 の 行 列 式(46)が 零 と仮 定 す る と矛 盾 が 起 き る こ と を示 す.式(37)の τφ に式(36)を 代 入 し,(37) を平 衡 点 の ま わ りで 線 形 化 す る と 〓(47) と な る.い ま平 衡 状 態 φ か ら一 定 の 速 度 で 変 位 が 起 きた 場 合 を 考 え る.こ の 場 合 加 速 度 △〓 は 零 とみ な せ る.ま た,式(46) を 零 と仮 定 した た め,結 局 △Pcop=0と な る.こ れ は φ が 等 速 で 変 位 して も床 反 力 中心 は 同 じ場 所 に と ど ま る こ と を意 味 す る.こ の 現 象 は 重 心 が 垂 直 に動 く よ う な 場 合 に は 可 能 で あ る が,前 節 の 最 初 で 述 べ た よ う に一 般 に は 重 心 軌 道 の接 線 は 床 面 に対 し て 垂 直 な 方 向 は 向 か な い.そ れ ゆ え 矛 盾 が 生 じ,可 制 御 行 列 は フ ル ラ ン ク で 線 形 シ ス テ ム は 可 制 御 と な る. 4.シ ミ ュ レ ー シ ョ ン 次 章 で 行 う実 験 に基 づ き,パ ラ メ ー タ をM=2.5,m=1.0, mf=0.25,L=0.34,l=0.17,4B=0.08,lf=0.03, Kd=100,Kp=400,Kf=2,000の よ う に 設 定 した.初 期 姿 勢 と して 足 を 少 し開 い て 直 立 した 状 態θRA=θLA=0.05, θ RH=θLH=π/2+0.05を 与 え る.10秒 間 の う ち にCoPを 左 側,右 側 そ して ふ た た び左 側 に 振 っ て そ こ に 保 つ 動 作 を 目 標 動 作 と し た.一 般 化 力 τφ を 式(23)に よ り決 定 し,そ れ を式 (35)に よ り各 関 節 に 分 配 す る.こ の と き足 部 が 回 転 しな い よ う 足 関 節 トル ク の 制 限 を考 慮 した. 比 較 の た め,外 力 が 加 わ ら な い 場 合(Fx=Fy=0)と 水 平 方 向 に外 力 が 加 わ る 場 合(Fx=0.1Mg,Fy=0)に 対 して シ ミ ュ レー シ ョ ン を行 っ た.CoPの 目標 軌 道 とシ ミュ レ ー シ ョン に よ る結 果 に つ い て,外 力 な しの 場 合 をFig.3に ,水 平 外 力 が 加 わ る場 合 をFig.4に 示 す.外 力 の あ る な しに か か わ ら ず 同 じ よ う な 軌 道 が 初 期 の 応 答 を 除 き得 られ て い る.し か し,両 者 の 差 はFig.5に 示 す 重 心 の 角 度 φ の 違 い と して 現 れ る.外 力 が 働 か な い 場 合,φ は0に 対 して 対 称 な 軌 道 と な る.し か し,水 平 外 力 が 加 わ る場 合 は 外 力 に 対 抗 す る方 向 にバ イ ア ス が か か り, 全 体 的 に 傾 い た 状 態 を 中 心 に 上 体 の 移 動 が 行 わ れ て い る.こ の 上 体 の 軌 道 変 化 は,そ の 目 標 軌 道 を調 節 し た わ け で は な く,床 反 力 中 心 を被 制 御 量 と して 制 御 した 結 果 と し て 自然 に 現 れ た も の で あ る こ と に 注 意 す る.
540伊 藤 聡 浅 野 博 紀 川 暗 晴 久
Fig.3CoP position for Fx=0
Fig.4CoP position for Fx=0.1Mg
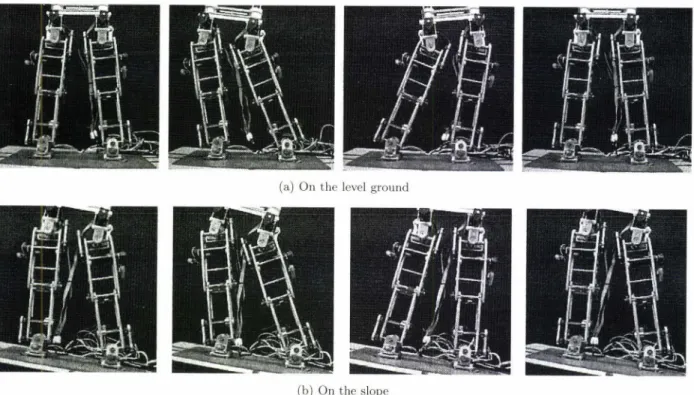
Fig.5Comparison of swayangle 5.ロ ボ ッ トに よ る 実 験 最 後 に ロ ボ ッ トを用 い た 実 験 に よ り理 論 の 検 証 を 行 っ た.ロ ボ ッ トは 胴 部 と大 腿 部,下 腿 部,足 部 か ら な る2本 の 脚 部 で 構 成 さ れ て い る.地 上 か ら股 関 節 ま で の 高 さは 直 立 時 で お よそ 40[cm]で 股 関 節 間 の 距 離 は16[cm],足 幅 は6[cm1で あ る.自 由 度 は股 関 節 に3自 由 度,膝 関 節 に1自 由 度,足 関 節 に2自 由 度 あ る が,運 動 を前 額 面 に 限 定 す る た め,股 関 節 お よ び 足 関 節 の ピ ッチ お よ び ヨ ー 軸 周 り の 自 由度 は 機 械 的 に 固 定 した.さ ら に,足 部 の 左 右 両 側 に 均 等 に 体 重 が か か り,FRI=FRoお よ びFLI=FLoと な る よ う足 関 節 は 自 由 関 節 と した.結 果 的 に 股 関 節 の トル クの み で 重 心 の 移 動 を行 う こ と に な る.全 重 量 は お よ そ5.0[kgw]で あ る.関 節 角 度 は,モ ー タ に取 り付 け ら れ た エ ン コ ー ダ に よ り計 測 す る.ま た 足 部 の 裏 側 四 隅 に 小 型 ロ ー ドセ ル を取 り付 け て 床 反 力 を 計 測 す る. 実 験 で の ロ ボ ッ トの 初 期 姿 勢 に は,足 関 節 間 の 距 離 が24[cm】 と な る よ う な 少 し足 を開 い た状 態 を与 え た.CoPの 目標 軌 道 は, CoPを 左 側,右 側 に 振 っ て か ら 中 央 に 戻 す 動 作 と して 与 え た. フ ィー ドバ ッ ク ・ゲ イ ン は シ ミュ レ ー シ ョ ン と 同 じKd=100, Kp=400,Kf=2,000と し た. 実 験 は 水 平 な 床 面 と,一 定 外 力 が 加 わ る こ と と等 価 な斜 面 の 2通 り を行 った.そ れ ぞ れ の実 験 の 様 子 をFig.6(a),(b)に 示 す.:Fig.7は 水 平 な 床 面 にお け る実 験,:Fig.8は 斜 面 に お け る 実 験 で の 床 反 力 中 心 の 目 標 値 と実 測 値 で あ る.斜 面 の 実 験 で は 最 初 の5秒 間 で 水 平 な 状 態 か ら傾 斜 を 作 り,ま た最 後 の5秒 間 で 傾 斜 面 を も との 水 平 な 状 態 に戻 し て い る.そ れ ら の 点 で の 違 い 以 外 は,シ ミュ レー シ ョ ン と同 様,傾 斜 角 度 つ ま り外 力 が あ る な し に か か わ らず,床 反 力 中心 は 目標 値 に お お よそ 追 従 し,両 者 で 似 た よ う な軌 道 が 得 ら れ る.た だ シ ミュ レ ー シ ョ ン と違 い, バ ッ ク ラ ッ シ ュ の 影 響 で 傾 きの 方 向 が 逆 転 し た 直 後 に振 動 が 起 き て い る.重 心 の 傾 き角 度 φ は シ ミ ュ レー シ ョ ン と 同 様,傾 斜 面 で は鉛 直 方 向 を 常 に 向 く よ う 斜 面 に 対 して 相 対 的 に傾 い て い る(Fig.9).こ の 振 る 舞 い も重 心 の 目標 軌 道 を傾 斜 角 度 に応 じ て 修 正 し て い る わ け で は な く,床 反 力 中心 を制 御 した 結 果,自 然 と あ ら わ れ て く る こ と を 付 け 加 え て お く. こ の 実 験 で は 脚 を 開 い て い る 分,平 衡 が と りや す く倒 れ に く い.そ こで よ り平 衡 維 持 が 難 しい 脚 を平 行 に し た状 態 で 同様 の 実 験 を 行 っ た.紙 面 の 関 係 で こ こ で は示 さ な い が,同 じ様 な 結 果 が 得 ら れ て い る. 6.討 論 本 稿 で は,両 脚 支 持 期 にお け る 前 額 面 内 で の 重 心 移 動 に つ い て 考 察 して き た.両 脚 支 持 期 は 歩 行 サ イ ク ル の 中 で も 占 め る割 合 は 比 較 的 小 さ く,走 行 時 に は 現 れ な い.そ う い っ た 意 味 で は 両 脚 支 持 期 の 制 御 は 応 用 範 囲 が 幾 分 限 定 さ れ る.両 脚 支 持 期 の 制 御 を積 極 的 に 扱 っ た研 究 は,両 脚 の 拘 束 に よ り低 次 元 化 す る ダ イナ ミ ク ス で の 固 有 値 設 定 問 題 と して 安 定 化 制 御 を試 み る研 究[9],両 脚 支 持 期 の 動 作 を動 的 成 分 と静 的 成 分 に 分 け た 力 学 解 析 に 基 づ い て 制 御 を 行 う 研 究[10],両 脚 支 持 期 に 冗 長 とな る 関 節 トル ク を歩 行 系 の 転 倒 ・滑 り防 止 の 拘 束 条 件 の も と で の トル ク和 最 小 条 件 で 実 験 的 に 各 関 節 に 分 配 す る 研 究[11]な ど が あ る. と こ ろ が,単 脚 支 持 期 に比 べ て そ の 数 は 少 な く,時 に は支 持 脚 の 交 換 が 短 時 間 で 行 わ れ る と仮 定 し て無 視 さ れ る こ と もあ る[12]. しか し,歩 行 の 開 始 時 お よ び 終 了 時 は必 ず 両 脚 支 持 で あ る こ と, ま た 単 脚 支 持 で 失 わ れ た平 衡 が 両 脚 を接 地 す る こ と に よ っ て 回 復 しや す い こ とな ど か ら,あ な が ち 軽 視 さ れ るべ き 問 題 で は な い と考 え る.本 稿 で は,足 先 な ど位 置 の 制 御 を必 要 とせ ず 重 心 の 移 動 の み を取 り扱 え る 例 と し て,単 純 な両 脚 支 持 期 の 重 心 移 動 を扱 っ て い る.一 定 な外 力 が 働 く場 合 に 関 してCoPの 目標 値 へ の 収 束 性 を 局 所 的 に で は あ る が 保 証 で き て い る の は,対 象 と す る動 作 を重 心 の 移 動 の み が 問 題 と な る 簡単 な もの と した こ と が 要 因 の 一 つ と して あ げ ら れ る. 環 境 の 変 化 の 表 現 と し て,本 稿 で は リ ン ク重 心 に働 く未 知 の 外 力 を考 え た.外 力 は 本 稿 で 提 案 す る 手 法 の 示 す 収 束 性 よ り も 十 分 変 化 が 遅 い もの で あ る必 要 が あ る.ま た,立 位 制 御 お け る 式(8)∼(10)の よ う に,両 脚 支 持 期 の 重 心 移 動 の 場 合 に も外 力 の 大 き さ ・方 向 に は ゲ イ ンに よ る制 限 が 加 わ る.し か し,そ の 範
床反力中心制樹1による2足 歩行系 両脚 支持 期の重心移動541
Fig.6 Robot hehaviors in the experiment
Fig. 7 Desired and actual CoP trajectories from the experiment on the level gounrd
Fig. 8 Desired and actual CoP trajectories from the experiment on the slope
Fig. 9 Comparison of phi trajectories between two expreiments
囲 内 な ら ば 未 知 の 外 力 に 条 件 は な く,一 般 性 の あ る表 現 とな っ て い る.実 験 で は 角 度 が 未 知 な 傾 斜 面 と い う形 で 環 境 変 化 を与 え た が,重 力 の 方 向 が 見 か け上 変 化 した も の を 考 え れ ば,こ の 環 境 変 化 も本 稿 で の 表 現 で十 分 記 述 で き る もの で あ る. ZMP規 範 に 基 づ い た 制 御 で は,慣 性 力 を う ま く 発 生 させ る こ とに よ り平 衡 を維 持 させ る も の で あ る .し か し,慣 性 力 の 計 算 は慣 性 モ ー メ ン ト等 の パ ラ メ ー タ値 に 依 存 して し まい,モ デ ル 化 誤 差 の 影 響 がZMPの 位 置 に 直 結 して し ま う.一方,本 手 法 で は,歩 行 系 の パ ラ メー タ値 は 制 御 則 そ の も の に は 必 要 と さ れ ず,ZMPの 実 測 値 の フ ィー ドバ ッ ク に よ りf1標 値 へ の 制 御 を 達 成 して い る.つ ま り,ZMP規 範 に 基 づ い た 手 法 は 本質 的 には 軌 道 計 画 問 題 で あ る の に 対 し,本 手 法 はCoPの レギ ュ レ ー タ問 題 で あ り,上 体 の 目標 軌 道 を 用 い な い こ と,そ れ に 伴 い モ デ ル 化 誤 差 の 影 響 が 少 な い こ とが 違 い と な って 現 れ る.文 献[4]∼[ 6]で も,ZMP実 測 値 の フ ィー ドバ ッ ク を提 案 し,実 際 に ロ ボ ッ ト に実 装 す る こ と で 有 効性 を 確 認 して い る もの もあ る が ,数 式 を 用 い た 収 束 性 の 解 析 は 行 わ れ て い な い.し た が っ て,CoPの 振 る 舞 い が 議 論 さ れ て い る こ とが 本研 究 の 特 徴 と な る . ZMP規 範 に よ る手 法 は 構 成上,フ ィー ドフ ォ ワー ド的 な運 動 を可 能 と す る が,本手 法 は 基 本 的 に は 誤 差 駆 動 の シ ス テ ム で あ る.よ っ て,素 早 い 運 動 の 実 現 につ い て は,ZMP規 範 に よ る制
542伊 藤 聡 浅 野 博 紀 川 崎 晴 久
御 と組 み合 わせ る な ど今後 の工 夫が 必要 で ある,
7.お わ り に 本 稿 で は,環 境 に 変 化 が あ る 場 合 の 両 脚 支 持 期 の 重 心 移 動 に つ い て 考 察 した.従 来 の 方 法 の 一 つ で は,重 心 の 目標 軌 道 を設 計 しそ れ に 対 す る追 従 制 御 を 行 う た め,環 境 が 変 化 して も 目標 を達 成 す る た め に は,そ の 目 標 軌 道 を 環 境 に 合 わ せ て 修 正 す る 必 要 が あ っ た.本 稿 で は,重 心 を 目標 軌 道 を制 御 す る の で は な く,床 反 力 中 心 を被 制 御 量 に す る 方 法 を 提 案 した.上 体 位 置 の 目標 軌 道 を使 用 しな い代 わ り に,床 反 力 中 心 に 基 づ い た 力 の 制 御 に よ り平 衡 維 持 が 行 わ れ る.一 般 に 位 置 と力 は 同 時 に 制 御 で き な い た め,こ こ で は 力 を 制 御 し,そ の 制 御 の 結 果 と して 位 置 す な わ ち 運 動 パ ター ンが 現 れ る.そ れ は 環 境 変 化 に 対 す る 上 体 の振 る 舞 い の 変 化 と して 観 察 され る. 制 御 方 法 に 対 す る安 定 性 に つ い て 議 論 した が,そ こ で は 床 反 力 中 心 の 目 標 値 が 一 定 で あ る と仮 定 し て き た.厳 密 に は 軌 道 に 対 す る 追 従 性 は保 証 され て い な い が,一 定 目 標 値 に 対 す る 局 所 安 定 性 に よ り,シ ミュ レ ー シ ョ ン お よ び 実 験 で 利 用 した 目 標 軌 道 に対 して は遅 れ な が ら も追 従 す る こ とが 示 せ た.こ の と き文 献[15]で 指 摘 され て い る よ う に,ZMPす な わ ち床 反 力 中 心 の 応 答 は逆 応 答 を 示 す.し か し,人 間 が 重 心 を横 方 向 に 移 動 す る 場 合 に も逆 応 答 が 見 ら れ[16],動 作 と して は 自然 で あ る と考 え る. この 制 御 方 法 の 問 題 点 と して,追 従 性 が や や 遅 い こ とが あ る. 今 後 は こ の 改 善 を 考 え る と 同 時 に,こ の ア プ ロ ー チ に そ っ た 足 踏 み 動 作 お よ び歩 行 の 実 現 を 目指 す.参
考
文
献
[1] M. Vukobratovic, B. Borovac, D. Surla and D. Stokic: Biped
Locomotion (Scientific Fundamentals of Robotics 7).
Springer-Verlag, 1990.
[2]高 西 淳 夫,石 田 昌 巳,山 崎 芳 昭,加 藤 一 郎:“2足 歩 行 ロ ボ ッ トWL-10RDに よ る 動 歩 行 の 実 現 ”,日 本 ロ ボ ッ ト 学 会 誌,vol.3.no.4, pp.325-336,1985.
[3] K. Nagasaka, H. Inoue and M. Inaba: •gDynamic walking
pat-tern generation for a humaniod robot based on opimal gradient method,•h Proc. of the 1999 IEEE Int. Conf. on Systems, Man, and Cybernetics, pp.VI908-VI913, 1999.
[4] K. Hirai, M. Hirose, Y. Haikawa and T. Takenaka: •gThe de-velopment of Honda humanoid robot,•h Proc. of 1998 IEEE Int. Conf. on Robotics and Automation, pp.1321-1326, 1998. [5] Q. Huang et al.: •gBalance control of a biped robot
combin-ing off-line pattern with realtime modification,•h Proc. of 2000 IEEE Int. Conf. on Robotics and Automation, pp.3346-3352, 2000.
[6] J.H. Park and H.C. Cho: •gAn on-line trajectory modifier for the base link of biped robots to enhance locomotion stability,•h Proc. of 2000 IEEE Int. Conf. on Robotics and Automation, pp.3353-3358,2000.
[7] A. Goswami: •gPostural stability of biped robots and the foot-rotation indicator (FRI) point,•h the International Journal of Robotics Research, vol.18, no.6, pp.523-533, 1999.
[8]伊 藤 聡,西 垣 智 啓,川 崎 晴 久:“ 床 反 力 に 基 づ い た 一 定 外 力 場 で の 起 立 姿 勢 に 対 す る 制 御 法 ”,計 測 自 動 制 御 学 会 論 文 集,vol.38.no.1, pp.79-86,2002. 19]成 清 辰 生,小 林 基,伊 藤 正 美.細 江 繁 幸:“ 二 足 歩 行 系 の 両 脚 支 持 期 の 制 御 に つ い て ”,電 気 学 会 論 文 誌,C,vol.103.no.12,pp281-286, 1983. [10]五 十 嵐 越 郎,野 飼 享:“ 二 足 歩 行 運 動 に お け る 両 脚 支 持 相 の 力 学 解 析 と 制 御 ”,日 本 ロ ボ ッ ト学 会 誌,vol.7,no.3.pp.142-150,1989. [11]佐 野 明 人,古 荘 純 次,伊 神 也 寸 志:“ 両 脚 支 持 期 に お け る2足 歩 行 シ ス テ ム の ト ル ク 分 配 制 御 ”,計 測 自 動 制 御 学 会 論 文 集,vol.26,no.9, pp.1066-1073,1990.
[12] F. Gubina, H. Hemami and R.B. McGhee: •gOn the dynamic stability of biped locomotion,•h IEEE Trans. on Biomedical En-gineering, vol.BME-21, no.2, pp.102-108, 1974.
[13] F.B. Horak and L.M. Nashner: •gCentral program of postu-ral movements: adaptive to alerted support-surface configura-tions,•h J. Neurophysiol, vol.55, no.6, pp.1369-1382, 1986. [14]広 瀬 茂 男,塚 越 秀行,米 田完:“ 不整 地 にお け る歩 行機 械 の 静 的安 定性 評
価 基 準”,日 本 ロ ボ ッ ト学 会誌,vol.16,no.8,pp.1076-1082,1998.
[15] Napoleon, S. Nakamura and M. Sampei: •gBalance control anal-ysis of humanoid robot based on ZMP feedback control,•h Proc. of the 2002 IEEE/RSJ Intl. Conf. on Intelligent Robots and
Systems, pp.2437-2442, 2002.
[16] G.M. Jones: •ePosture,•fE.R. Kandel et al. eds., Principles of neural science (fourth edition). pp.816-831, McGraw-Hill com-panies, 2000. 伊 藤 聡(Satoshi Ito) 1968年12月10日 生.1991年 名 古 屋 大 学 工 学 部 情 報 工 学 科 卒 業.1993年 同 大 学 大 学 院 工 学 研 究 科 博 士 課 程 前 期 課 程 修 了.1994年 よ り理 化 学 研 究 所 バ イ オ ・ミ メ テ ィッ ク コ ン トロ ー ル 研 究 セ ン タ ー に 勤 務.1999年,岐 阜 大 学 工 学 部 助 手,現 在 に 至 る. 工 学 博 士.計 測 自動 制 御 学 会,IEEEな ど の 会 員. 旧 本 ロ ボ ッ ト学 会 正 会 員) 川 崎 晴 久(Haruhisa Kawasaki) 1949年6月27日 生.1974年 名 古 屋 大 学 大 学 院 工 学 研 究 科 修 士 課 程 修 了,同 年 日本 電 信 電 話 公 社(現 NTT)入 社,1990年 金 沢 工 業 大 学 教 授.1994年 8月 よ り岐 阜 大 学 工 学 部 教 授,現 在 に 至 る.ロ ボ ッ ト制 御,バ ー チ ャ ル ・リ ア リ テ ィ 応 用 ロ ボ テ ィ ク ス な ど の 研 究 に 従 事.計 測 自動 制 御 学 会,日 本 機 械 学 会,日 本 バ ー チ ャ ル ・リ ア リテ ィ学 会,IEEEな ど の 会 員.工 学 博 士.(日 本 ロ ボ ッ ト学 会 正 会 員) 浅 野 博 紀(Hironori Asano) 1980年12月8日 生.2003年 岐 阜 大 学 工 学 部 機 械 シ ス テ ム 工 学 科 卒 業,現 在 同 大 学 大 学 院 工 学 研 究 科 機 械 シ ス テ ム 工 学 専 攻 博 士 前 期 課 程 在 学 中.