2 DOF Adaptive PID Control with a Parallel Feedforward Compensator for Nonlinear Systems
Ikuro Mizumoto* and H. Tanaka Department of Intelligent Mechanical Systems
Kumamoto University
2-39-1 Kurokami, Kumamoto, 860-8555, Japan
Zenta Iwai
Kumamoto Prefectural College of Technology 4455-1 Haramizu, Kikuyo-mach, Kikuchi-gun
Kumamoto, 869-1102, Japan
Abstract— In this paper, we propose a design method of an adaptive PID controller based on output feedback for nonlinear systems with a higher order relative degree and disturbances. To realize an adaptive PID control system, we introduce a PFC for a nonlinear system which does not satisfy OFEP(Output Feedback Exponentially Passive) conditions and design an adaptive feedforward input with a structure of RBF (Radial Basis Fuction) neural networks in order to remove the steady-state bias error from the PFC output. The proposed method can design a robust adaptive PID controller with higher accuracy on tracking control.
I. INTRODUCTION
In the recent decade, much attention has been paid to high gain output feedback-based adaptive controls for nonlinear systems due to their simple structure and high robustness with respect to uncertainties and disturbances [1], [2], [3].
The most typical design condition for designing the output feedback-based adaptive control is recognized as the output feedback exponentially passive (OFEP) condition [3]. This condition is well known as the ASPR condition for linear systems [4]. Unlike other adaptive methods, under OFEP (or ASPR) condition, one can easily design an output feedback- based adaptive controller without a priori information of the order of the controlled system and without designing a state observer.
Recently, auto-tuning and an adaptive PID control strate- gies based on the almost strictly positive real (ASPR) prop- erty of the controlled system have been proposed [8], [9] for linear systems. The PID control is one of the most common control schemes applied to many industrial processes and mechanical systems. Since the control has played a very important role in the improvement of production quality, accuracy and in reducing production costs, a great deal of attention has been turned to auto-tuning PIDs including self-tuning schemes and adaptive control strategies [5], [6], [7], [8], [9], [10] in order to maintain the desired control performance and stability during operation.
In this paper, we propose an adaptive PID control system design scheme for nonlinear systems utilizing the output feedback exponential passivity (OFEP) [3], [11] of the con- trolled system. The sufficient conditions for the system to be OFEP are that (1) the system is globally exponential minimum-phase, (2) the system has a relative degree of 1 and (3) the nonlinearities of the system satisfy the Lipschitz con- ditions [3]. Unfortunately, however, most practical systems
do not satisfy the above-mentioned OFEP conditions. In the proposed method, the introduction of a parallel feedforward compensator (PFC) is considered to solve both the relative degree and minimum-phase problems simultaneously [11], [12]. Further, since it has been indicated that affects from the introduced PFC result in degradation of the control perfor- mance in the output tracking control, we consider introducing a feedforward signal generated by an adaptive RBF NN (radial basis function neural networks) [13] directly to the original controlled system in order to maintain the output tracking control performance. The proposed adaptive PID controller can maintain stability a better control performance even if there are some changes of the system properties by adjusting PID parameters and RBF NN parameters adap- tively.
II. PROBLEM STATEMENT
Consider the following SISO affine nonlinear systems:
˙
x(t) = f(x) +g(x)u(t) +p(ω)
y(t) = h(x) (1)
where x(t) ∈ Rn is a state vector, u(t) ∈ R is a control input, y(t)∈R is an output, and, f(x),g(x) :Rn →Rn, h(x) : Rn → R are of sufficiently smooth (e.g. of class C∞) functions such thatf(0) =0, h(0) = 0. Further,p(ω) represents the effect of disturbances. We assume that the disturbance and a reference signalyrwhich the output of the system is required to track are generated by the following exosystem:
˙
ω(t) =s(ω) yr(t) =py(ω)
s(0) =0, py(0) = 0, (2) where ω(t) ∈ Rq is a state vector of the exosystem. We assume that the exosystem (2) satisfies the neutral stabil- ity property [14]. That is, the linear approximation S = ∂s
∂ω
ω=0 of the vector field s(ω) at ω = 0 has all its eigenvalues on the imaginary axis.
Definition 1: (Output Feedback Exponentially Passive(OFEP))[3] The system (1) with p(0) = 0 is said to be OFEP if there exists a smooth output feedback:
u(t) =α(y) +β(y)v(t)
α(y) = 0, β(0) = 0 (3)
Proceedings of the 2009 IEEE International Conference on
Networking, Sensing and Control, Okayama, Japan, March 26-29, 2009
such that the resulting closed loop system fromv(t)toy(t) is exponentially passive, that is for the closed loop system, the following dissipation inequality (DI) is satisfied
V˙(x) =∂V(x)
∂x (f(x) +g(x)v)≤yv−ζ(x) (4) with a (C2) positive definite function V and a positive definite functionζ(x)having the following properties:
δ1||x||2≤V(x)≤δ2||x||2
δ3||x||2≤ζ(x), (5) where δ1∼δ3 are positive constants andζ(x)is a positive definite function.
Sufficient conditions for the system (1) to be OFEP have been provided in [3] such that (C1) the system has a relative degree of one, (C2) the system be globally exponential minimum-phase and (C3) the nonlinearities of the system satisfy the Lipschitz condition.
In this paper, we consider an adaptive PID control system design based on the OFEP property for nonlinear systems which do not satisfy OFEP conditions.
We suppose that the nominal part of the system (1) satisfies the following assumptions.
Assumption 1: The system (1) has a relative degree of r and there exists a nonsingular transformation z(t) = [z1, z2,· · ·, zn]T = Φ(x) such that the system (1) can be transformed into the following canonical form:
˙
zi(t) = zi+1(t) +pi(ω) (i= 1,2,· · · , r−1)
˙
zr(t) = a(zξ,η) +b(zξ,η)u(t) +pr(ω)
˙
η(t) = q(zξ,η) +pη(ω) y(t) = z1(t)
(6)
where zξ= [z1,· · ·, zr]T,η= [zr+1,· · ·, zn]T and a(0,0) =Lrfh(0) = 0, q(0,0) =0
b(zξ,η) =LgLrf−1h(x)= 0, ∀x∈Rn
Assumption 2: Nonlinear functions a(zξ,η), q(zξ,η) andb(zξ,η)are globally Lipschitz with respect to(zξ,η).
Assumption 3: There exist positive constantsB¯M and¯b0
such thatb(zξ,η)can be evaluated as
0<¯b0≤b(zξ,η)≤B¯M (7) Assumption 4: The linear approximation of the system (1) at x(t) = 0 is stabilizable and its zero dynamics has no eigenvalue on the imaginary axis.
The objective of this paper is to design a PID control system which has the outputy(t) track the reference signal yr(t) for uncertain nonlinear systems with higher order relative degrees and/or non-minimum phase properties. That is, for uncertain nonlinear systems, the goal is to achieve
tlim→∞|y(t)−yr(t)| ≤δ (8) for any given small positive constant δ.
III. CONTROL SYSTEM DESIGN
It has been clarified that, under Assumption 4 and the as- sumption that the exosystem (2) satisfies the neutral stability property, there exists an ideal statex∗(t)and an ideal input v∗(t)which attain perfect output tracking:
˙
x∗(t) =f(x∗) +g(x∗)v∗(t) +p(ω)
y(t) =yr(t) =h(x∗) (9) and they are given by functions ofω as x∗(t) =π(ω)and v∗(t) =c(ω)[14], [15].
In the following, we will show an adaptive PID control system design with the adaptively estimated feedforward input v(t) of the ideal input v∗(t) for uncertain and non- OFEP systems.
A. Ideal Input Approximation by RBF NN
Consider approximating the ideal control input v∗(t) by a Radial Basis Function (RBF) neural networks (NN). We approximatev∗(t)by the form of RBF NN as
vnn(t) =WTS(ω) (10) where W = [w1,· · ·, wl]T ∈ Rl is the weight vector, l is the number of NN nodes (weight number) and S(ω) = [s1(ω),· · · , sl(ω)]T is the radial basis function vector. This basis function vector S(ω) is generally designed by the Gaussian functions such as
si(ω) = exp
−(ω−μi)T(ω−μi) ηi2
, i= 1,2,· · ·, l (11) where μi = [μi1,· · ·, μiq]T is the center of the receptive field andηi is the width of the Gaussian function.
It has been clarified [13] that, for a sufficiently largeland a compact setΩω⊂Rq, there exists an ideal constant weight vectorW∗ such that
W∗arg min
W∈Rl
sup
ω∈Ωω|v∗−WTS(ω)|
(12) and thus the ideal inputv∗(t)can be approximated by
v∗(t) =W∗TS(ω) + (ω)
| (ω)| ≤ ∗ (13) where (ω)is an approximation error.
Here we impose the following assumption.
Assumption 5: For a given NN nodes l, there exists an ideal weight vectorW∗ that satisfies (12) for allω∈Ωω.
In practice,W∗is the unknown vector so that one can not designW in (10) asW =W∗.W will be adaptively adjust in the proposed control system design which will be shown later.
B. Realization of OFEP controlled system
In order to guarantee the stability of the designed adaptive PID control system, we consider utilizing system’s OFEP property. Unfortunately, however, most practical systems including those with relative degree of greater than 1 and/or non-minimum phase are not OFEP, we here consider an introduction of a parallel feedforward compensator (PFC) to realize an OFEP augmented controlled system [11], [12].
Consider anfth order PFC of the form:
˙
xf(t) =Afxf(t) +bfu(t)
yf(t) =cTfxf(t) (14) and introduce this in parallel with the system (1). The resulting augmented system can be represented by
˙
x(t) =f(x) +g(x)u(t) +p(ω)
˙
xf(t) =Afxf(t) +bfu(t)
ya(t) =y(t) +yf(t) =h(x) +cTfxf(t). (15) Since the augmented system (15) has a relative degree of 1, there exists a nonsingular transformation [ya,ηa] = Φa(x,xf) such that the augmented system (15) can be transformed into the following form [14]:
˙
ya(t) =aa(ya,ηa) +ba(ya,ηa)u(t) +p1(ω)
˙
ηa(t) =qa(ya,ηa) +pηa(ω) (16) Here we impose the following assumption on the aug- mented system (16).
Assumption 6: The zero dynamics of the augmented sys- tem (16):
˙
ηa(t) =qa(0,ηa) (17) is exponentially stable.
Assumption 7: The PFC (14) is strictly positive real (SPR).
It should be noted that, under Assumption 2, aa(ya,ηa), qa(ya,ηa) and ba(ya,ηa) are globally Lipschiz and thus under Assumption 6, the resulting augmented system is OFEP [3]. That is, we assume that an SPR PFC which render the resulting augmented system OFEP is known.
Furthermore, under assumption 3, it follows that there exist positive constantsBM andb0 such that
0< b0≤ba(ya,ηa)≤BM (18) C. Adaptive PID System Design
Adaptive PID controller with adaptive NN feedforward input is designed as follows:
u(t) =ue(t) +v(t) ue(t) =−K(t)TZ(t)
v(t) = ˆWT(t)S(ω)
(19) with
K(t) = [kp(t), kd(t), ki(t)]T, Z(t) = [¯ea(t),e˙¯a(t), w(t)]T
˙
w(t) = ¯ea(t)−δw(t), δ >0
(20)
+- ++
Adaptive NN Controller
PFC Nonlinear-System Reference
Model
Adaptive PID ω v
( ) ( ) ( ) ( )ω
ω ω s
p t y
t
r =
& = yr ea ue u
( ) ( ) ( )
( )t ( )t y
t u t A t
f T f f
e f f f f
x c
b x x
= +
& =
yf
y ya
( ) ( ) ( ) ( ) ( ) ( ) ( )fxx gx pω
x h t y
t u t
=
+ +
& =
+- ++
Adaptive NN Controller
PFC Nonlinear-System Reference
Model
Adaptive PID ω v
( ) ( ) ( ) ( )ω
ω ω s
p t y
t
r =
& = yr ea ue u
( ) ( ) ( )
( )t ( )t y
t u t A t
f T f f
e f f f f
x c
b x x
= +
& =
yf
y ya
( ) ( ) ( ) ( ) ( ) ( ) ( )fxx gx pω
x h t y
t u t
=
+ +
& =
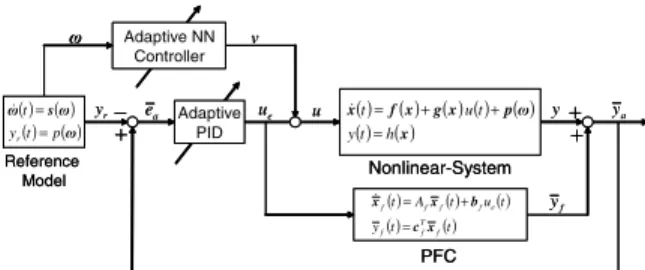
Fig. 1. Block diagram of the proposed adaptive control system
and
k˙p(t) = γpe¯2a(t)−σpkp(t), γp>0, σp>0 k˙d(t) = γde¯a(t) ˙¯ea(t)−σdkd(t), γd>0, σd>0 k˙i(t) = γie¯aw(t)−σiki(t), γi>0, σi>0 W˙ˆ(t) = −ΓS(ω)−σWˆ(t), Γ>0, σ >0
(21)
Where
¯
ea= ¯ya(t)−yr(t) (22)
¯
ya(t) =y(t) + ¯yf(t) (23) andy¯f(t)is defined as the output of the PFC withue(t)as an input
˙¯
xf(t) =Afx¯f(t) +bfue(t)
¯
yf(t) =cTfx¯f(t). (24) Wˆ(t)is an estimated value of the ideal weight vectorW∗.
The overall block diagram of the designed control system is shown in Fig. 1
D. Stability Analysis
Equivalent representation of the designed control system given in Fig. 1 is given by the following form using the augmented system representation given in (16)
˙
ya(t) =aa(ya,ηa) +ba(ya,ηa)(ue(t) +v(t)) +p1(ω)
˙
ηa(t) =q(ya,ηa) +pηa(ω)
¯
ya(t) =ya(t)−yˆf∗(t), (25) where yˆ∗f(t)is a PFC output withv(t)as an input
˙ˆ
xf(t) =Afxˆf(t) +bfv(t) ˆ
y∗f(t) =cTfxˆf(t) (26) Further, the ideal state in which the perfect output tracking y(t)≡yr(t)is achieved is also represented as follows using the augmented system expression.
˙
ya∗(t) =aa(y∗a,η∗a) +ba(ya∗,η∗a)v∗(t) +p1(ω)
˙
η∗a(t) =q(ya∗,η∗a) +pηa(ω)
¯
ya∗(t) =yr(t) =y∗a(t)−y∗f(t),
(27) wherey∗f(t)is a PFC output with the ideal feedforward input v∗(t)as an input.
˙
x∗f(t) =Afx∗f(t) +bfv∗(t)
yf∗(t) =cTfx∗f(t) (28)
From(25)and(27), the error system can be represented by Δ ˙ya =aa(ya,ηa)−aa(y∗a,η∗a)
+ba(ya,ηa)(ue(t) +v(t))−ba(ya∗,η∗a)v∗(t) Δ ˙ηa =qa(ya,ηa)−qa(ya∗,η∗a) (29)
¯
ea(t) = ¯ya(t)−y¯∗a= Δya−Δyf∗,
where Δya = ya(t)−ya∗(t), Δηa = ηa(t)−η∗a(t) and Δy∗f = ˆy∗f(t)−yf∗(t).
Next considering the difference between (26) and (28), we have the following PFC error system:
Δ ˙xf =AfΔxf+bfΔv
Δyf∗ =cTfΔxf, (30) where Δxf = ˆxf(t)−x∗f(t)andΔv=v(t)−v∗(t).
From Assumption 7, the PFC error system (30) can be transformed into the following canonical form:
Δ ˙y∗f =ayΔy∗f+cTyηy+byΔv
˙
ηy =Aηyηy+cηyΔyf∗
(31) using an appropriate nonsingular transformation [14].
Therefore it follows from (29) and (31) that the error system can be rewritten as
˙¯
ea =aa(ya,ηa)−aa(y∗a,η∗a)
+ba(ya,ηa)(Δue+ Δv−K∗TZ) +(ba(ya,ηa)−ba(ya∗,η∗a))v∗
−ayΔyf∗−cTyηy−byΔv Δ ˙ηa =qa(ya,ηa)−qa(ya∗,η∗a)
˙
ηy =Aηyηy+cηyΔyf∗
(32)
where
Δue=ue(t)−u∗e(t) =−KT(t)Z+K∗TZ
=−ΔKTZ (33)
ΔKT = [Δkp,Δkd,Δki]T
= [kp(t)−k∗p, kd(t)−kd∗, ki(t)−ki∗]T Δv =v(t)−v∗(t) = ˆWT(t)S(ω)−W∗TS(ω)−
= Δ ˆWTS(ω)− (34) From Assumption 6, there exist a positive definite functionU(Δηa) and positive constants κ1 to κ4 such that [16]
∂U(Δηa)
∂ηa qa(0,Δηa)≤ −κ1Δηa2 ∂U(Δηa)
∂ηa
≤κ2Δηa κ4Δηa2≤U(Δηa)≤κ3Δηa2.
(35)
Further since the PFC error system (31) is SPR from Assumption 7, representing(31)as
Δ ˙¯xf = ¯AfΔ¯xf+ ¯bfΔv Δyf∗ = ¯cTfΔ¯xf
(36) with
Δ¯xf = [Δy∗f,ηTy]T A¯f =
ay cTy cηy Aηy
,¯bf =
by
0
¯
cTf = [1,0,· · · ,0]
there exist positive definite matrices P¯f = ¯PfT > 0,Q¯f = Q¯Tf >0such that the following Kalman-Yakubovich Lemma is satisfied
A¯fP¯f+ ¯PfA¯f=−Q¯f
P¯f¯bf = ¯cf. (37) Now, consider a positive definite functionV:
V =Ve+Vη+δ1Vxf +Vk
+(BM +by)Δ ˆWTΓ−1Δ ˆW (38) withVe = ¯e2a, Vη =μ1U(Δηa), Vxf = Δ¯xTfP¯fΔ¯xf, Vk =
b0
γpΔkp2+γb0dΔkd2+bγ0iΔki2+b0ki∗w2+b0k∗de¯2a and any positive constantδ1, μ1.
The time derivative ofVe= ¯e2acan be evaluated from(32) that
V˙e= 2¯ea{aa(ya,ηa)−aa(ya∗,η∗a) +ba(ya,ηa)(Δue
+Δv−K∗TZ) + (ba(ya,ηa)−ba(ya∗,η∗a))v∗
−ayΔyf∗−cTyηy−byΔv}
≤2¯ea{La1(|Δya|+Δηa) +ba(ya,ηa)(Δue
+Δv−K∗TZ) +bMv∗−ayΔy∗f
−cTyηy−byΔv}.
WhereLa1is a Lipschiz constant such that
aa(ya,ηa)−aa(ya∗,η∗a)< La1(|ya−ya∗|+ηa−η∗a) andbM is a positive constant that satisfies
0<ba(ya,ηa)−ba(ya∗,η∗a) ≤bM
The time derivative ofVη=μ1U(Δηa)can be evaluated as
V˙η =μ1∂U
∂ηa{qa(ya,ηa)−qa(y∗a,η∗a)}
≤μ1∂U
∂ηaqa(0,Δηa) +μ1
∂U
∂ηa
(qa(ya,ηa)
−qa(0,Δηa)) +μ1
∂U
∂ηa
qa(y∗a,η∗a)
≤ −μ1κ1Δηa2+μ1κ2ΔηaLq(|ya|+η∗a) +μ1κ2ΔηaqM
WhereLq is a Lipschiz constant such that
qa(ya,ηa)−qa(0,Δηa)< Lq(|ya|+η∗a) andqM is a positive constant that satisfies
0<qa(ya∗,η∗a) ≤qM.
Further the time derivative ofVxf = Δ¯xTfP¯fΔ¯xf can be evaluated as
V˙xf = ( ¯AfΔ¯xf+ ¯bfΔv)TP¯fΔ¯xf
+ Δ¯xTfP¯f( ¯AfΔ¯xf+ ¯bfΔv)
=−Δ¯xTfQ¯fΔ¯xf+ 2Δy∗fΔv
≤ −λQfΔ¯xf2+ 2Δy∗fΔv
≤ −1
2λQf|Δyf∗|2−1
2λQfηy2+ 2Δy∗fΔv
≤ −(1
2λQf −ρy)|Δyf∗|2−1
2λQfηy2+ 1 ρy
|Δv|2, (39) where λQf = λmin[ ¯Qf] is the minimum value of the eigenvalues ofQ¯f andρy is any positive constant.
Furthermore for Vk we have V˙k = 2b0
γp
Δkp(γp¯e2a−σpkp) +2b0
γd
Δkd(γde¯ae˙¯a−σdkd) +2b0
γi Δki(γie¯aw−σiki) + 2b0k∗iw(¯ea−δw) +2b0k∗de¯ae˙¯a
= 2b0Δkp¯e2a−2b0σp
γp
Δkpkp+ 2b0Δkd¯eae˙¯a
−2b0σd
γd Δkdkd+ 2b0Δkie¯aw−2b0σi
γi Δkiki
+2b0k∗iw¯ea−2b0ki∗δw2+ 2b0kd∗¯eae˙¯a, (40) Thus, the time derivative ofV is evaluated by
V˙ = ˙Ve+ ˙Vη+δ1V˙xf+ ˙Vk
+(BM+by)(−ΓS(ω)¯ea−σWˆ)TΓ−1Δ ˆW +(BM+by)Δ ˆWTΓ−1(−ΓS(ω)¯ea−σWˆ)
≤2La1|¯ea||Δya|+ 2La1|¯ea|Δηa −2b0kp∗¯e2a
+2bM|¯ea||v∗|+ 2ay|Δyf∗||¯ea|+ 2|¯ea|cyηy
−μ1κ1Δηa2+μ1κ2LqΔηa(|¯ea+ Δyf∗+y∗a| +η∗a) +μ1κ2qMΔηa −δ1(1
2λQf −ρy)|Δy∗f|2
−δ1
2λQfηy2+ δ1
ρy(Δ ˆW2S(ω)2
+2 ∗Δ ˆWS(ω)+ ∗2) + 2(BM+by) ∗|e¯a|
−2b0σp
γp |Δkp|2+2b0σp
γp |Δkp||k∗p|
−2b0σd
γd |Δkd|2+2b0σd
γd |Δkd||kd∗|
−2b0σi
γi
|Δki|2+2b0σi
γi
|Δki||ki∗| −2b0δ|k∗i|w2
−2(BM+by)σλΓΔ ˆW2
+2(BM+by)σλMΓ Δ ˆWW∗, (41) where, λΓ = λmin[Γ−1] and λMΓ = λmax[Γ−1] are the minimum and the maximum values of the eigenvalue ofΓ−1.
Consequently, we have V˙ ≤ − 2b0kp∗−2La1−L2a1
ρ0 −L2a1
ρ1 −ρ2−a2y
ρ3 −cy2 ρ4
−μ21κ22L2q
4ρ6 −ρ13
|¯ea|2
−(μ1κ1−ρ1−ρ5−ρ6−ρ7−ρ8−ρ9)Δηa2
− δ(1
2λQf −ρy)−ρ0−ρ3−μ21κ22L2q
4ρ7
|Δy∗f|2
− δ1
2λQf −ρ4
ηy2− 2b0σp
γp −ρ10
|Δkp|2
− 2b0σd
γd
−ρ11
|Δkd|2− 2b0σi
γi
−ρ12
|Δki|2
− 2(BM+by)σλΓ−ρ14−ρw
−δ1
ρyS2M
Δ ˆW2−2b0δ|ki∗|w2+b2M|v∗|2 ρ2
+μ21κ22L2q
4ρ5 η∗a2+μ21κ22L2q
4ρ8 |ya∗|2+μ21κ22
4ρ9 q2M
+b20σ2p
γp2ρ10|kp∗|2+ b20σd2
γd2ρ11|k∗d|2+ b20σi2
γi2ρ12|ki∗|2 +δ12SM2
ρwρ2y
∗2+δ21
ρy
∗2+(BM +by)2 ρ13
∗2
+(BM+by)2σ2λMΓ 2
ρ14 W∗2 (42)
with any positive constants ρ0 ∼ ρ14, ρw and SM = maxS(ω). Then, considering a sufficiently large ideal feedback gaink∗ such that
2b0k∗p−2La1−Lρ2a01 −Lρ2a11 −ρ2−aρ2y3
−cy2
ρ4 −μ214ρκ226L2q −ρ13
> γν >0 (43)
and settingρ0,ρ1,ρ3 ∼ρ12,ρ12,ρy,ρw,δ1,μ1 such as ρ1 =ρ5=ρ6=ρ7=ρ8=ρ9=μ17κ1
ρy = λQf4 , ρ0=ρ3= δ161λQf, ρ4=3164δ1λQf
ρ10= b0γσpp, ρ11= b0γσdd, ρ12=b0γσii ρ14=ρw= (BM+b2y)σλΓ
δ1 = 16μλ1κ22L2q
Qfκ1 , μ1= (BM+by)σλΓκ1λ
2 Qf
128κ22L2qSM2 ,
we have
V˙ ≤ −γν|¯ea|2−1
7μ1κ1Δηa2− δ1
64λQfΔ¯xf2
−b0σp
γp |Δkp|2−b0σd
γd |Δkd|2−b0σi
γi |Δki|2
−1
2(BM +by)σλΓΔ ˆW2−2b0δ|k∗i|w2+R (44)