可変ディジタルフィルタ
—
設計から応用まで
—
Variable Digital Filters:
From Design to Application
越田俊介
Shunsuke KOSHITA阿部正英
Masahide ABE川又政征
Masayuki KAWAMATA アブストラクト 可変ディジタルフィルタは,遮断周波数や帯域幅などをリアルタイムで制御できる周波数選択性ディジタル フィルタであり,電気通信,音声・音響信号処理など幅広い分野にて用いられている.本論文では,主として設計と実現の 問題に着目して,可変ディジタルフィルタに関する研究成果を紹介する.また,可変ディジタルフィルタの応用として,適 応信号処理の分野における可変ディジタルフィルタの研究成果についても述べる. キーワード 可変ディジタルフィルタ,設計,実現,適応信号処理への応用Abstract Variable digital filters are frequency-selective digital filters whose frequency characteristics, such as the cutoff frequency and bandwidth, can be controlled in real time. Variable digital filters are used in a number of fields such as telecommunications, speech processing and audio processing. This paper discusses recent research activities on variable digital filters, focusing on the problems of design and realization. In addition, research results on variable digital filters regarding their application to adaptive signal processing are also reviewed.
Key words Variable digital filter, Design, Realization, Application to adaptive signal processing
1.
は じ め に
ディジタルフィルタは信号処理の基礎を成す重要な技術であ るが,多くの信号処理アプリケーションでは,フィルタリング を実行しながらそのフィルタ特性を変化させることを必要とす る場合がある.例えば,ディジタルオーディオ機器などの音響 処理システムでは,低域フィルタや帯域フィルタの遮断周波数 をリアルタイムで変化させることがしばしば要求される.可変 ディジタルフィルタは,そのような要求を満足する手法として よく知られている. 可変ディジタルフィルタに関する研究は 1970 年頃に始まり, 現在に至るまで数多くの成果が報告されている.このうち 1990 年代までの研究成果については,文献(1)において幅広くかつ 詳しく解説されているので,是非一読されたい.可変ディジタ ルフィルタの研究において考えるべき問題については,固定の ディジタルフィルタの場合と同様である.すなわち文献(2)で述 べられているとおり,設計・実現・実装それぞれが,可変ディジ タルフィルタの主な研究課題となる.更に可変ディジタルフィ ルタの分野では,応用をテーマとした研究成果も数多く報告さ 越田俊介 正員 東北大学大学院工学研究科電子工学専攻 E-mail [email protected] 阿部正英 正員:シニア会員 東北大学大学院工学研究科電子工学専攻 川又政征 正員:フェロー 東北大学大学院工学研究科電子工学専攻Shunsuke KOSHITA, Member, Masahide ABE, Senior Member, and Masayuki KAWAMATA, Fellow (Graduate School of Engineering, Tohoku University, Sendai-shi, 980-8579 Japan).
電子情報通信学会 基礎・境界ソサイエティ
Fundamentals Review Vol.10 No.1 pp.34–45 2016年 7 月 c ⃝電子情報通信学会 2016 れている.その一つとして,可変ディジタルフィルタを適応信 号処理へ応用した研究が様々な観点から提案されている.詳し くは後述するが,この代表的なテーマとして,適応ノッチフィ ルタが 1980 年代から現在に至るまで盛んに研究されている. 本稿では,まず可変ディジタルフィルタの基礎事項について 概説する.次に,主として設計・実現のテーマ及び適応信号処 理への応用のテーマに着目し,可変ディジタルフィルタに関す る近年の研究動向について述べる.また,筆者らがこれまでに 提案した手法についても紹介する.
2.
可変ディジタルフィルタ
2. 1
用語についての注意
まず,「可変ディジタルフィルタ」の用語の意味を明確にして おく.可変ディジタルフィルタとは,周波数振幅特性において 低域通過特性や帯域通過特性などの周波数選択性を有し,かつ その周波数選択性を維持しながら,少ない個数のパラメータに よって振幅特性をリアルタイムで調節できるディジタルフィル タを指す.例えば図 1 に示されるように,パラメータ η によっ て遮断周波数を調節可能な低域ディジタルフィルタは,可変ディ ジタルフィルタの代表的な例である.また図 2 のように,通過 域の中心周波数がパラメータ ξ によって可変とされた帯域ディ ジタルフィルタも,可変ディジタルフィルタとしてよく知られて いる.一方,適応信号処理の分野(3)では,用いられる適応フィ ルタを「可変係数フィルタ」と呼ぶことが多いが,以下に示す ように,この用語は上述の可変ディジタルフィルタとは異なる図 1 可変低域ディジタルフィルタの例
1
䋭1
0
㱚
㱚> 0 㱚< 0
Normalized frequency
M
a
g
n
it
u
d
e
㱥
0 図 2 可変帯域ディジタルフィルタの例 意味を持つので注意されたい. • 可変ディジタルフィルタでは,リアルタイムで調節され るパラメータは,振幅特性における特定の箇所を調節するパラ メータのみである.例えば図 1 の可変低域フィルタの場合は,遮 断周波数を調節するパラメータ η のみがリアルタイムで調節さ れ,他のフィルタ係数は固定とされるか,あるいは η に依存し た関数として変化する.同様に,図 2 の可変帯域フィルタの場 合は ξ のみが調節される.これに対し,適応信号処理にて用い られる可変係数フィルタでは,全てのフィルタ係数が適応アル ゴリズムによってリアルタイムで調節される(注 1). • 可変ディジタルフィルタも可変係数フィルタも周波数特 性を変化させるという意味では同じであるが,変化のさせ方に 関しての考え方が両者で異なる.可変ディジタルフィルタでは, 振幅特性において,低域通過特性や帯域通過特性といった周波 数選択性を示す形状は維持されたままで,特性が変化する.す なわち,周波数選択性を維持するという制約を設けた上で,特 性を変化させるフィルタが可変ディジタルフィルタである.一 方,適応信号処理において用いられる可変係数フィルタは,こ のような制約を設けずにフィルタ特性を変化させる.それゆえ に,適応アルゴリズムの収束によって得られる最適なフィルタ は,低域通過や帯域通過といった周波数選択性を必ずしも有す るとは限らない. (注 1):ただし後述のように,可変低域フィルタや可変帯域フィルタ等を適応フィル タとして用いた場合は,遮断周波数等の調節に関わる特定のパラメータのみが適応ア ルゴリズムによって調節される.これは,適応信号処理の特別な場合であると解釈で きる.2. 2
可変ディジタルフィルタの作り方
ここでは,可変ディジタルフィルタをどのような手順で求める かについて概説する.この手順は,基本的には固定の特性のディ ジタルフィルタを求める場合と同じである.すなわち文献(2)に て解説されているとおり,設計・実現・実装の三つの手順によっ て,所望の可変ディジタルフィルタが得られる.本節では,可 変ディジタルフィルタを対象とした設計問題に関して説明する. 実現と実装の手順に関しては,固定特性のディジタルフィルタの 場合(2)と同じであるので省略する.ただし可変ディジタルフィ ルタの場合には,設計と実現の問題を切り離さず,その両方を 同時に行うという手法も多いので注意されたい.なお,以降で は,可変ディジタルフィルタにおいてリアルタイムで調節され るパラメータ(図 1 では η,図 2 では ξ に対応)を,可変パラ メータと呼ぶことにする. 可変ディジタルフィルタを設計するためには,可変ディジタ ルフィルタの入出力関係(すなわち伝達関数あるいは差分方程 式)を,可変パラメータを含む形で記述する必要がある.例とし て,図 1 に示す可変低域フィルタを設計する問題を考える.こ の可変フィルタを FIR フィルタとして設計する場合には,伝達 関数を H(z, η) = N ∑ k=0 hk(η)z−k (1) として与え,その係数 hk(η)を η の関数として記述する.よっ て,η を含む係数の組{hk(η)} (0 <= k <= N ) をどのようにし て求めるかが,可変低域 FIR フィルタの設計問題となる.IIR フィルタとして可変低域フィルタを設計する場合も同様である. すなわち,IIR フィルタの場合には,可変低域フィルタの伝達 関数を H(z, η) = ∑M k=0bk(η)z−k 1 +∑N m=1am(η)z−m (2) と し て 与 え ,η の 関 数 と し て 記 述 さ れ る フィル タ 係 数 の 組 {am(η)} (1 <= m <= N ) と {bk(η)} (1 <= k <= M ) をそれ ぞれどのようにして求めるかが,設計問題となる.3.
可変ディジタルフィルタの研究動向
上述の問題を踏まえ,本章では主として設計と実現の観点か ら,可変ディジタルフィルタの研究動向について述べる.可変 ディジタルフィルタの分野では,主流とされている手法が二つ あるので,以下ではこの二つの手法の詳細について概説する. また,この二つの手法に関連する近年の研究成果についても述 べる.3. 1
手法
1:
伝達関数の変数変換に基づく手法
主流とされる手法の一つは,伝達関数の変数変換を利用した 手法である.この手法では,まず,固定係数のフィルタの伝達関数(すなわち,可変パラメータを含まない伝達関数)を何らか の設計法によって得る.このフィルタはプロトタイプフィルタ と呼ばれ,多くの場合,低域フィルタとして設計される.この ようにして用意されたプロトタイプフィルタの伝達関数に対し, 可変パラメータを含む関数を用いた変数変換を適用して,所望 の可変ディジタルフィルタの伝達関数が得られる.言うまでも なく,変数変換の方法は様々存在するが,可変ディジタルフィル タの設計においては,全域通過関数を用いた変数変換(4)が有名 である.この変数変換は周波数変換とも呼ばれる.周波数変換 については文献(1)において十分に解説されているが,現在にお いても周波数変換に基づく可変ディジタルフィルタの研究は数 多く報告されており,また筆者らの研究成果もこの方法に基づ いているため,本稿では(1)での論述を補足する形で,周波数変 換の詳細について改めて解説する. 例として,図 1 に示される遮断周波数可変の低域フィルタの 設計を考える.周波数変換に基づく設計では,低域通過型のプ ロトタイプフィルタの伝達関数 Hp(z)をあらかじめ用意した上 で,次式の変数変換によって所望の可変低域フィルタの伝達関 数 H(z, η) を得る. H(z, η) = Hp(z)|z−1←T (z,η) T (z, η) = z −1− η 1− ηz−1 (3) 可変パラメータ η の値を変更することによって,可変低域フィ ルタ H(z, η) の遮断周波数が変化する.η > 0 ならば,H(z, η) の遮断周波数はプロトタイプフィルタの遮断周波数より小さくな る.η < 0 の場合は,H(z, η) の遮断周波数はプロトタイプフィ ルタの遮断周波数より大きくなる.プロトタイプフィルタが安定 であり,かつ|η| < 1 が満足されていれば,変数変換によって得 られる伝達関数 H(z, η) は必ず安定となる.なお T (z, η) は全域 通過関数であるため,任意の η 及び ω に対して|T (ejω, η)| = 1 が成り立つことに注意されたい. 次に,このようにして得られる可変低域フィルタの実現(す なわち,伝達関数 H(z, η) のブロック図の構築)について述べ る.式 (3) から分かるように,周波数変換は Hp(z)における変 数 z−1を全域通過関数 T (z, η) で置換することを意味するので, 可変低域フィルタのブロック図は,プロトタイプフィルタにおけ る遅延素子を全域通過フィルタで置き換えることによって得ら れると解釈できる.しかし多くの場合,単にこの置き換えをを実 行しただけでは,結果としてディレイフリーループが生じるた めに実装できなくなる.この問題について説明するために,例 として,次式の伝達関数を有する二次の IIR プロトタイプフィ ルタを考える. Hp(z) = b0+ b1z−1+ b2z−2 1 + a1z−1+ a2z−2 (4) このフィルタのブロック図を図 3(a) に示される直接形構造とし て与えると,上述の置き換えによって得られる可変ディジタル フィルタのブロック図は図 3(b) となる.明らかに,図 3(b) の 構造はディレイフリーループを有しているため,この構造を実 装することは不可能となる. よく知られているように,ディレ (a)二次プロトタイプフィルタ (b)遅延素子の置き換えによって得られる二次可変低域フィルタ 図 3 可変低域フィルタの実現における問題点 イフリーループの問題は伝達関数あるいは差分方程式の数式を 整理することによって回避できるが,可変ディジタルフィルタ の実現においては,この方法は一般的に有効とは言えない.例 えば式 (4) の二次プロトタイプフィルタに対して式 (3) の周波 数変換を適用し,更に伝達関数の数式を整理すると,二次可変 低域フィルタの伝達関数は以下のように得られる. H(z, η) = b ′ 0(η) + b′1(η) + b′2(η) 1 + a′1(η) + a′2(η) a′1(η) = −2η + a1(1 + η 2)− 2a 2η 1− a1η + a2η2 a′2(η) = η 2− a 1η + a2 1− a1η + a2η2 b′0(η) = b0− b1η + b2η 2 1− a1η + a2η2 b′1(η) = −2b0η + b1(1 + η 2)− 2b 2η 1− a1η + a2η2 b′2(η) = b0η 2− b 1η + b2 1− a1η + a2η2 (5) この方法に基づいて可変低域フィルタを実装する場合,η の値 が変更されるたびにフィルタ係数 a′1(η), a′2(η), b′0(η), b′1(η)及 び b′2(η)を再計算する必要があるため,計算量が増加してしま う.特に,上述のフィルタ係数は η の有理多項式となっている ために,フィルタ係数の再計算にて除算が必要とされることが, 実装コストの面で大きな問題となる. 上述の問題を解決するアプローチの一つとして,テイラー近 似を用いる方法がよく知られている(5).この方法では,可変パ ラメータの絶対値が非常に小さいと仮定した上で,有理多項式 にて記述されるフィルタ係数をテイラー展開し,一次の項で打
図 4 周波数変換とテイラー近似に基づく二次可変低域 フィルタ ち切る.例えば,式 (5) で記述される可変低域フィルタの場合 は,|η| ≪ 1 と仮定し,以下のようにフィルタ係数を近似する. a′1(η) ≈ a1+ (a21− 2 − 2a2)η a′2(η) ≈ a2+ (a1a2− a1)η b′0(η) ≈ b0+ (a1b0− b1)η b′1(η) ≈ b1+ (a1b1− 2b0− 2b2)η b′2(η) ≈ b2+ (a1b2− b1)η (6) このように近似されたフィルタ係数は除算を必要としないので, 加算と乗算のみで可変低域フィルタが実現できる.このフィルタ 係数を用いた可変低域フィルタのブロック図を図 4 に示す.こ のブロック図では,η 以外の乗算器は固定係数となるため,η の 値が変更された場合においても式 (5) のように係数を再計算す る必要はない. 上述のとおり,周波数変換とテイラー近似を用いることによ り,実装に適した形で可変低域フィルタを得ることができる.し かしこの手法では,|η| ≪ 1 を仮定した近似に基づいているた め,調節できる遮断周波数の範囲が制限されるという欠点があ る.すなわち,この手法による可変低域フィルタでは,調節され る遮断周波数がプロトタイプフィルタの遮断周波数から離れる につれて,近似を用いない場合の可変低域フィルタに対する特 性の誤差が大きくなってしまう.更に,フィルタが不安定とな る場合もあり得る.この誤差をなるべく小さくするために,係 数感度の低いフィルタ構造(すなわち,フィルタ係数を有限の ビット長に量子化した際の特性劣化を小さくするフィルタ構造) に対応した伝達関数に基づいてプロトタイプフィルタを記述し, そのフィルタに対して周波数変換及びテイラー近似を適用する 手法が提案されている(5)∼(7).これらの手法では,適用可能な伝 達関数のクラスが限定されるものの,テイラー近似による誤差 が直接形構造を用いる場合よりも低減されることが示されてい る.また,これらの手法にて用いられる伝達関数の記述は,前述 のとおり係数感度の低いフィルタ構造に対応しているため,有 限のビット長での実装時に発生する量子化誤差も近似誤差と同 様に小さくなるという利点がある.なお,この手法に基づく可 変ディジタルフィルタは,一次元フィルタだけでなく二次元フィ ルタの分野においても提案されている(8). 近似誤差を小さくするためのアプローチは,他にも様々提案 されている.例えば文献(9)では,ウェーブディジタルフィルタ の構造を利用した手法が提案されている.この手法ではアナロ グフィルタの知識を必要とするが,文献(1)でも解説されている とおり非常に優れた精度が達成され,比較的広い範囲で遮断周 波数を調節することが可能である.一方,文献(10),(11)では テイラー近似を用いずに,有理多項式で記述されるフィルタ係 数をステップ応答の収束値によって近似的に求める手法が提案 されている.この手法では,可変パラメータが変化するたびに フィルタ係数を再計算する必要があるため計算量が増加するが, 除算を必要とせず加算・乗算のみでフィルタ係数を求めること ができるので,実装に適している.更に,ステップ応答の系列 を長くすることによって,近似誤差を非常に小さくすることが でき,それゆえに,遮断周波数の調節範囲を従来法よりも広く することが可能となる.また,筆者らはこの手法を状態空間表 現へ拡張し,近似誤差の低減と量子化誤差の最小化を同時に実 現する高精度可変ディジタルフィルタを提案している(12),(13). この他,文献(14)では,周波数変換と係数間引きを組み合わせ たアプローチに基づく可変ディジタルフィルタを提案しており, 更に FPGA 上での実装・性能評価を通して,提案法が小さい ハードウェアコストで実装できることを示している. 以上,可変低域フィルタを設計・実現する際のディレイフリー ループの問題と,その対策について述べた.一般的に言うと,こ のディレイフリーループの問題は,変換にて用いる全域通過関数 において分子多項式の定数項が非零である場合に発生する.こ のような全域通過関数は,帯域幅を可変とするフィルタを設計 する場合に用いられる.言い換えると,図 2 のように帯域幅を 固定した可変帯域フィルタの場合は,置き換えによるディレイ フリーループは発生しないため,可変フィルタの設計と実装が 非常に容易となる.この利点は,4. 3 で紹介する高次の可変帯 域フィルタ及び可変帯域消去フィルタを適応信号処理へ応用し た研究において有効となる. 最後に,周波数変換に基づく手法の利点と欠点をまとめる.利 点は下記のようになる. • 遮断周波数の調節が単純な変数変換に基づいているため, 可変特性の実現が容易である. • 周波数変換において近似をしない場合には,変換の前後 で,振幅特性の形状に関する性質が保存される.例えばバタワー ス低域フィルタでは振幅特性が単調減少であるとともに最大平 たん性を有するが,このフィルタに周波数変換を適用して得ら れる可変ディジタルフィルタもまた,これらの性質を有する. • 上に述べた二つの利点により,周波数変換に基づく可変 ディジタルフィルタは適応信号処理においても有効となる.詳 細は次章で述べるが,周波数変換に基づく可変フィルタを適応 フィルタとして用いると,単峰性の評価関数を構成でき,それ ゆえに大域最適解への収束が保証される適応アルゴリズムを構 築することが可能となる. • もう一つの手法(次節で述べる係数の多変数多項式近似 に基づく手法)と比べ,フィルタリングに必要とされる計算量 が少ない. • データの量子化に起因する特性劣化を低減する手法が数
多く提案されているので,それらの手法を用いることにより,有 限のビット長での実装において高い演算精度を達成できる. 一方,欠点としては以下が指摘されている. • 先に述べたとおり,遅延素子を全域通過フィルタで置き 換えた際にディレイフリーループが生じることがあるため,対 策が必要となる. • 帯域フィルタ・帯域消去フィルタ・多重帯域フィルタな ど,複数の通過域あるいは阻止域を持つ可変ディジタルフィル タを設計する場合には,変換にて用いる全域通過関数の次数を 高くする必要がある.したがって,得られる可変ディジタルフィ ルタの次数がプロトタイプフィルタの次数よりも大きくなって しまう.例えば可変帯域・可変帯域消去フィルタを設計する場合 には二次の全域通過関数が必要となるため,これらの可変フィ ルタの次数はプロトタイプフィルタの次数の 2 倍となる. • 変換にて用いられる全域通過関数は IIR フィルタである ため,プロトタイプフィルタが FIR フィルタであっても,周波 数変換によって得られる可変フィルタは IIR フィルタとなる.ゆ えに周波数変換による設計法では,得られる可変フィルタにお いて線形位相特性を実現することができない. • 周波数変換による設計法では,可変とできる周波数特性 の要素は遮断周波数のみである.したがって,遷移帯域幅や消 去域減衰量といった他の要素を可変とすることはできない.
3. 2
手法
2:
係数の多変数多項式近似に基づく手法
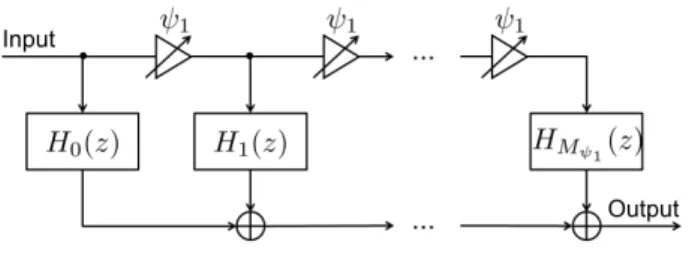
ここでは,もう一つの有名な手法として,係数の多変数多項式 近似に基づく手法について概説する.近年では,この手法に基づ く可変ディジタルフィルタが最も盛んに研究されている(15)∼(30). この手法の大きな利点は,フィルタの周波数特性において,上 述の周波数変換による手法では不可能であった遮断周波数以外 の可変特性の実現が可能となることである.例えば図 5 に示さ れるように,遷移帯域幅と消去域減衰量を可変とする可変低域 フィルタ等は,この手法によって設計できる.また,この手法 では IIR フィルタだけでなく FIR フィルタも設計できるため, 振幅特性を可変とするだけでなく線形位相特性を実現すること もできる.更に,振幅特性とともに群遅延をも可変とするよう なフィルタを設計することも可能となる. 図 5 係数の多変数多項式近似による可変低域フィルタ の例 以下,この手法に基づくフィルタ設計及び実現について述べ る.まず,遮断周波数・遷移域帯域幅・阻止域減衰量など,可変 としたい特性の要素に対応する可変パラメータを K 種類考え, その組を (ψ1, ψ2,· · · , ψK)とする(この手法においては,可変 パラメータはスペクトルパラメータとも呼ばれる).そして,こ れらの可変パラメータに基づき,多変数多項式としてフィルタ 係数を記述する.例えば N 次の可変 FIR フィルタを設計する 場合は,伝達関数を次のように与える. H(z, ψ1, ψ2,· · · , ψK) = N ∑ n=0 hn(ψ1, ψ2,· · · , ψK)z−n(7) そして,フィルタ係数 hn(ψ1, ψ2,· · · , ψK)については,次式 のように多変数多項式を用いて記述する. hn(ψ1, ψ2,· · · , ψK) = Mψ1 ∑ mψ1=0 Mψ2 ∑ mψ2=0 · · · MψK ∑ mψK=0 cn(mψ1, mψ2,· · · mψK) ×ψmψ1 1 ψ mψ2 2 · · · ψ mψK K (8) 上式の係数 cn(mψ1, mψ2,· · · mψK)を求めることが,この手法 における可変ディジタルフィルタの設計問題となる.なお上式 において,整数 Mψ1, Mψ2,· · · , MψK はそれぞれ近似多項式に おける変数 ψ1, ψ2,· · · , ψKに対応する次数であり,設計者が指 定する.この近似多項式の係数 cn(mψ1, mψ2,· · · mψK)を求め るための方法としては,評価関数の最小化が一般的である.す なわち文献(2)でも述べたように,ある評価関数を与え,それを 最小化する係数の組を求めるというアプローチがよく使われる. このようにして得られた可変ディジタルフィルタの実現につ いては,Farrow 構造(31)がよく使われる.簡単な例として,可 変パラメータが ψ1のみである可変ディジタルフィルタの実現 を考える.この伝達関数は以下のように表される. H(z, ψ1) = N ∑ n=0 hn(ψ1)z−n = N ∑ n=0 M∑ψ1 mψ1=0 cn(mψ1)ψ mψ1 1 z−n (9) 上式は H(z, ψ1) = M∑ψ1 mψ1=0 (∑N n=0 cn(mψ1)z −n ) ψmψ1 1 (10) と書けるので, Hmψ1(z) = N ∑ n=0 cn(mψ1)z −n, 0 < = mψ1 <= Mψ1 (11) と置くと,結果として以下の記述が得られる. H(z, ψ1) = Mψ1 ∑ mψ1=0 Hmψ1(z)ψ mψ1 1 (12) この記述に基づくと,可変ディジタルフィルタ H(z, ψ1)は 図 6 に 示 さ れ る Farrow 構 造 に て 実 現 で き る .こ の 構 造 で は,固定係数で構成される Mψ1 + 1個の N 次 FIR フィル図 6 係数の多変数多項式近似による可変低域フィルタ の Farrow 構造に基づく実現 タ H0(z), H1(z),· · · , HMψ1(z)が,可変係数 ψ1を介して並列 接続されていると解釈できる.H0(z), H1(z),· · · , HMψ1(z)そ れぞれにおいて ψ1は含まれないため,ψ1の値が変化した場合 でもこれらのフィルタの係数を再計算する必要はない.この点 で,Farrow 構造は可変ディジタルフィルタの実装に適している と言える. 以上,フィルタ係数の多変数多項式による近似に基づく可変 フィルタの設計・実現について概説した.この手法の利点は本節 の初めで述べたとおりであるが,主な欠点は,フィルタ係数を 多変数多項式で記述している点から明らかなように,フィルタ リングの計算量が膨大になってしまうことである.また,この 手法は近似に基づいているため,前節にて述べたテイラー近似 と同様に,調節される特性の範囲が限定される.更に,この手 法では多くの固定係数フィルタが必要とされるため,特に IIR フィルタの場合において,有限のビット長での実装における特 性劣化が非常に大きくなる恐れがある.この特性劣化はフィル タ構造を変更することで低減可能であるが,筆者らの知る限り では,この手法に対して特性劣化を低減するフィルタ構造を採 り入れた研究はまだ報告されていない.
3. 3
その他の設計法
上に述べた手法とは別のアプローチも数多く報告されている. 例えば文献(32)では,ある一つの伝達関数を持つフィルタを与 え,それを複数個縦続接続することで,所望の可変ディジタル フィルタを設計するという手法が提案されている.この手法で は,周波数変換とは別のアプローチにより,ディレイフリールー プを発生させずに帯域幅を低コストで調節できることが示され ている.また文献(33)∼(35)では,周波数応答マスキング法及 び高速フィルタバンクを可変フィルタ設計へ応用することによっ て,Farrow 構造による可変フィルタよりも少ない計算量で所望 の可変特性を得る手法が提案されている. この他,適応信号処理への応用において有効となる可変フィ ルタも数多く提案されている.最も有名なものは可変のノッチ フィルタであり,その設計法については,二次の IIR フィルタ に基づく手法が一般的である.可変ノッチフィルタの設計法に ついては幾つか知られているが,どの設計法においても上述の ディレイフリーループや計算量等の問題は生じず,簡単な方法 によりフィルタ特性の制御を可能としている.この他,ノッチ 周波数における振幅の減衰量を可変とするフィルタや,複数の ノッチの減衰量と帯域幅を可変とするくし形フィルタなども提 案されており,適応信号処理への応用の観点でも有効であるこ とが示されている.これらの詳細は次章で詳しく述べる.4.
可変ディジタルフィルタの研究動向
(応用)
本章では,可変ディジタルフィルタの応用に関する研究につ いて述べる.特に,本章では適応信号処理への応用に関する研 究に注目し,主として可変のノッチフィルタを用いた適応信号 処理(すなわち適応ノッチフィルタ)について概説する.また, 可変ノッチフィルタ以外の可変フィルタを適応信号処理へ応用 した研究についても紹介する.4. 1
適応ノッチフィルタ(全域通過フィルタに基づ
く設計法)
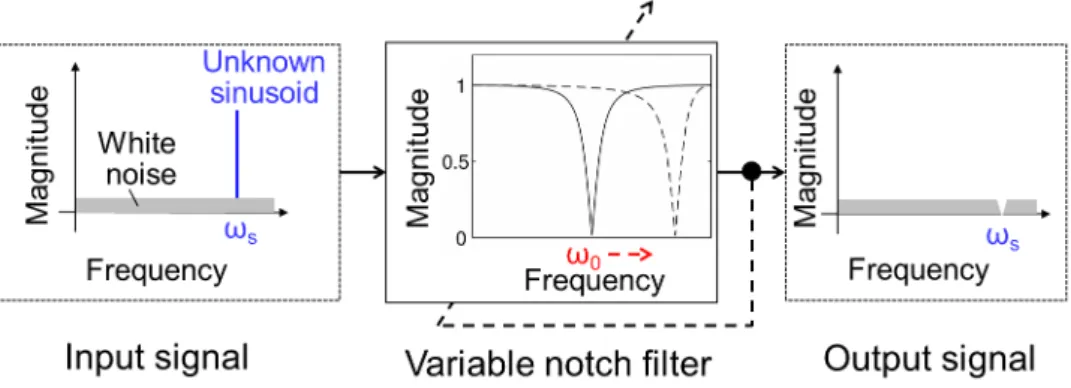
可変フィルタを用いた適応信号処理の分野において,適応ノッ チフィルタは最も盛んに研究されており,1980 年代から現在に 至るまで様々な研究成果が報告されている.適応ノッチフィル タは,図 7 に示されるように,白色雑音などの広帯域信号に混 在した未知の正弦波を自動的に検出して除去するという用途で 用いられる.この正弦波の検出のために,何らかの適応アルゴ リズムを用いて,ノッチ周波数(すなわち振幅を 0 とする周波 数)ω0を未知正弦波の周波数 ωsに向かって収束させるように 制御する.ゆえに適応ノッチフィルタではノッチ周波数 ω0が可 変となり,適応アルゴリズムが収束した際の ω0の値は,未知正 弦波の周波数 ωsの推定値となる.そのため,適応ノッチフィル タは正弦波の除去だけでなく周波数推定の用途でも用いられる. なお,図 7 では未知正弦波を除去するシステムとなっているが, 正弦波を強調し白色雑音を抑制するシステムも構築できる.正 弦波強調の方法としては,ノッチフィルタではなくピーキング フィルタ(共振器,逆ノッチフィルタとも呼ばれる)を適応フィ ルタとして用いる方法,ノッチフィルタの出力信号を入力信号か ら減算する方法などが知られている(注 2).このように未知の正弦 波を検出し除去あるいは強調するシステムは,レーダ,ソナー, 通信システムの狭帯域干渉波除去,音声信号のハウリングサプ レッサなど,多くのアプリケーションにて用いられている. 以下では,適応ノッチフィルタにおける問題設定,及びノッ チ周波数の制御の考え方について述べる.図 7 に示したとおり, 適応ノッチフィルタの問題設定では,正弦波と白色雑音の和と して入力信号を与えることが一般的である.すなわち,適応ノッ チフィルタの入力信号 u(n) を,以下の式によって与える. u(n) = A sin(ωsn + ϕ) + w(n) (13) ここで,A と ωsはそれぞれ未知正弦波の振幅と周波数であり, (注 2):減算する方法を用いる場合は,ノッチフィルタの特性に関して注意する必要 がある.なぜならば,一般的に,帯域消去フィルタの出力を入力から減算することで 得られる信号は,位相特性の影響により必ずしも帯域フィルタの出力と等価になると は限らないためである.ただし,後述する二次全域通過関数に基づくノッチフィルタ の場合には,周波数特性において相補の性質が成り立つため,フィルタ出力を入力か ら減算することで帯域フィルタの出力と等価な信号が得られる.図 7 適応ノッチフィルタを用いた正弦波検出・除去システム 初期位相 ϕ は区間 [0, 2π) において一様分布する乱数である.ま た,w(n) は平均 0 の白色雑音であり,ϕ と互いに無相関である. このように与えた入力信号 u(n) に対する適応ノッチフィルタの 出力信号を y(n) とする.適応フィルタとして用いるノッチフィ ルタの伝達関数は幾つか知られているが,本節では,二次の全域 通過フィルタに基づくノッチフィルタ(36)に着目する.このノッ チフィルタの伝達関数 H(z, η, ξ) は次式のように与えられる. H(z, η, ξ) = 1 2(1 + A(z, η, ξ)) (14) ここで,A(z, η, ξ) は次式で示される二次の全域通過フィルタで ある. A(z, η, ξ) = η− (1 + η)ξz −1+ z−2 1− (1 + η)ξz−1+ ηz−2 (15) これより,式 (14) は以下のように表される. H(z, η, ξ) = 1 + η 2 1− 2ξz−1+ z−2 1− (1 + η)ξz−1+ ηz−2 (16) このノッチフィルタにおいて,η はノッチ幅(振幅の減衰量が 3dB以上となる帯域の幅)を決定するパラメータであり,ξ は ノッチ周波数 ω0を決定するパラメータである.したがって,こ のように設計されるノッチフィルタは,ノッチ幅とノッチ周波数 をそれぞれ独立に調節することができる.なお,このノッチフィ ルタは 3. 1 にて述べた周波数変換に基づいて設計されるフィル タであるとも解釈できる(37).すなわち式 (14) から,プロトタ イプフィルタを Hp(z) = 1 2(1 + z −1) (17) として,このフィルタに対して二次全域通過関数 A(z, η, ξ) によ る周波数変換 z−1← A(z, η, ξ) を適用することにより,所望の ノッチフィルタ H(z, η, ξ) が得られる.更に厳密に言えば,こ のノッチフィルタは,二次のバタワース型の帯域消去フィルタ と同じ伝達関数になっていると解釈できる(38).したがってこの ノッチフィルタでは,直流及びナイキスト周波数における振幅 の値が 1 となり,これらの周波数からノッチ周波数 ω0に向かっ て振幅が単調に減少し,ノッチ周波数 ω0においては振幅が 0 と なる. このノッチフィルタを適応フィルタとして用いた場合のシス テム全体のブロック図を図 8 に示す.前述のとおり,適応アル 図 8 適応ノッチフィルタのブロック図 ゴリズムが収束すると,フィルタの出力 y(n) では入力 u(n) の 正弦波の成分が除去される.なお,上述のノッチフィルタでは ノッチ周波数とノッチ幅の二つの要素をそれぞれ可変とするこ とができるが,多くの適応アルゴリズムではノッチ幅を固定と し,ノッチ周波数のみを制御して未知正弦波の周波数 ωsを推定 する.ゆえに以降では,ノッチ周波数 ω0を適応的に制御するた めの考え方について概説する. ω0の制御のための考え方は様々存在するが,最も基本的な考 え方は,一般的な適応フィルタと同様に,勾配法に基づいて評 価関数を最小化するという考え方である.ただし適応ノッチフィ ルタでは,フィルタ出力の二乗平均 E[y2(n)]が評価関数として よく用いられる.すなわち適応ノッチフィルタでは,評価関数 の与え方については一般的な適応フィルタと異なり,参照信号 (所望信号とも呼ばれる)とフィルタ出力との誤差を扱わないこ とに注意されたい(注 3)(注 4).適応ノッチフィルタは ω 0を制御す るため,評価関数 E[y2(n)]は ω 0の関数として扱う.入力信号 u(n)が式 (13) のように単一正弦波と白色雑音の和として与え られ,かつ適応ノッチフィルタの振幅特性がノッチ周波数に向 かって単調に減少する場合には,評価関数 E[y2(n)]は単峰性と なる.ゆえに勾配法を用いることによって,E[y2(n)]を最小と するノッチ周波数 ω0を見つけることができる.実際,このとき (注 3):図 8 において,y(n) を誤差信号と呼んでいる論文も数多く存在する.し かし,誤差という用語を用いる場合には真値と推定値とがそれぞれ明確にされてい る必要があるが,適応ノッチフィルタにおいては,真値は正弦波の周波数 ωsであ り,その推定値はノッチ周波数 ω0であると解釈されるので,真値と推定値との差分 ωs− ω0は,明らかにフィルタ出力 y(n) とは一致しない.ゆえに筆者らとしては, y(n)を誤差信号と呼ぶことは不適切であると考える. (注 4):ただし,図 8 に他の様々な要素を追加したシステムを考え,そのシステムに て参照信号を明確な形で導入した手法も報告されている.この場合には,一般的な適 応フィルタと同様に,参照信号とノッチフィルタ出力 y(n) との差分が誤差信号とな る.
のノッチ周波数 ω0が,正弦波の周波数 ωsと一致する(注 5).し たがって,E[y2(n)]に対する ω 0の勾配を適応アルゴリズムに おいて用いることで,ω0は ωsに収束し,正弦波の検出及び除 去が達成される. 上述の勾配法に基づく適応アルゴリズムには,大きな問題点 が指摘されている.それは,ノッチ周波数の初期値が正弦波の周 波数から離れている場合に,収束が非常に遅くなってしまうとい うことである.この問題を解決するために,様々な手法がこれま でに提案されている.例えば文献(39)∼(41)では,ノッチフィ ルタを正規化ラティス構造によって実現し,その構造における状 態変数をノッチ周波数の更新に利用するという方法が提案され ている.この方法は Simplified Lattice Algorithm (SLA) と呼 ばれ,評価関数の最小化のアプローチとは別のものとして位置付 けられるが,少ない計算量で適応アルゴリズムを構築でき,かつ 上述の収束の問題を解決できることが示されている.更に筆者 らは,この SLA と勾配法とをアフィン結合した適応アルゴリズ ムである Affine Combination Lattice Algorithm (ACLA) を 提案しており,ACLA が SLA よりも更に高速な収束特性を得 ることを,理論と実験の両方の面で示している(42).この他の手 法としては,忘却係数を含む最小二乗法に基づく手法(43),ノッ チ幅の異なる複数のノッチフィルタを並列接続して適応アルゴ リズムを構築する手法(44),(45),勾配に対して単調増加関数を導 入して収束の高速化を図る手法(46)等が提案されている. 適応アルゴリズム以外の研究として,性能評価についての理 論的な解析も多数報告されている.文献(47)では,乗算器の少 ないラティス構造に基づく適応ノッチフィルタを用いた適応アル ゴリズムを提案するとともに,定常状態における適応ノッチフィ ルタの挙動が理論的に解析されている.この解析により,周波 数推定精度などの性能評価が可能となる.また,筆者らも SLA 及び ACLA における性能評価として,定常状態の周波数推定値 の平均二乗誤差を解析的に導出している(48),(49). この他,上述のノッチフィルタに関連した研究として,文 献(50)では逆ノッチフィルタを対象とした解析及び基本周波数 推定法が提案されている.また文献(51)では,フィルタ出力に おける広帯域信号の成分の劣化を抑制するため,ノッチ周波数 における振幅の大きさ(ノッチゲインと呼ばれる)を 0 とせず 可変とし,適応的に制御する手法が提案されている.
4. 2
適応ノッチフィルタ(その他の設計法)
ここでは,前節で述べた全域通過フィルタに基づくノッチフィ ルタとは別の設計法によって与えられる適応ノッチフィルタにつ いて述べる.例えば,次式で与えられる二次の IIR ノッチフィ ルタがよく知られている(52). H(z, r, a) = 1 + az −1+ z−2 1 + arz−1+ r2z−2 (18) (注 5):詳細は後述するが,用いられるノッチフィルタの伝達関数によっては,評価 関数の最小値を与える ω0は ωsから少しずれるという場合がある(すなわち,周 波数推定値にバイアスがかかる).ただし,上述の全域通過フィルタに基づく伝達関 数を用いた場合は,ω0の最適値は ωsと一致することが知られている(39)∼(41). 上式において,a と r はそれぞれノッチ周波数とノッチ幅を決定 するパラメータである.ゆえにこのフィルタを適応ノッチフィ ルタとして用いる場合は,a を適応的に制御して正弦波の周波 数を推定する.このノッチフィルタは Constrained Poles and Zerosと呼ばれる手法に基づいて設計されたものであり,世界 的な研究動向としては,この設計法に基づく適応ノッチフィル タを用いた成果が最も多く報告されている(52)∼(59). このノッチフィルタの伝達関数は前節で述べたノッチフィルタ の伝達関数とは異なるため,両者は幾つかの観点で異なる性質 を持つ.例えば,前節で述べたノッチフィルタでは振幅の最大値 が常に一となるが,式 (18) のノッチフィルタの振幅はノッチ幅 に依存して変化する.それゆえに,フィルタ出力の二乗平均の 値についても,両者のフィルタでは異なる性質が見られる.こ れらの詳細については文献(60)を参照されたい.更に,式 (18) の伝達関数に基づく適応ノッチフィルタでは,周波数推定値に バイアスが生じるという欠点がある.ただしこのバイアスにつ いては理論的な解析が数多くなされており,解析の研究成果と 同様に,バイアスを抑制する適応アルゴリズムも数多く提案さ れている.上述の Constrained Poles and Zeros に基づくノッチフィル タ以外には,ラティス構造に対応した伝達関数として設計された 二次 IIR ノッチフィルタ(61),(62),二次アナログフィルタに対す る双一次変換によって設計された IIR ノッチフィルタ(63)∼(66), 4. 1で述べた設計法とは別の伝達関数を持つプロトタイプフィ ルタに対して周波数変換を適用し得られた二次 IIR ノッチフィ ルタ(67)等が提案されている.
4. 3
高次の可変帯域・帯域消去フィルタを用いた適
応信号処理
これまでに述べた適応ノッチフィルタの研究では,全ての手 法が二次の可変帯域消去フィルタあるいは可変帯域フィルタを 対象としていたが,高次の可変フィルタを適応信号処理へ応用 した研究成果も幾つか報告されている.言うまでもなく,二次 フィルタでは計算量が少ない反面,遮断特性が急峻にならない. それゆえにフィルタの出力信号においては,除去すべき成分が 十分に除去できなかったり,通過すべき成分の一部が不要に除 去されてしまったりする.その結果,二次の適応フィルタに基 づく手法では,出力信号の SN 比が悪くなるという問題が生じ る.文献(38)で述べられているように,この問題は,適応フィ ルタとして用いる可変フィルタの次数を高くすることで改善で きる.すなわち図 9 の例に示されるように,高次のフィルタで は急しゅんな遮断特性が実現できるので,除去すべき成分と通 過すべき成分とをはっきり分離させることができ,出力信号の SN比の改善をもたらす. 高次の可変フィルタを適応フィルタとして用いた研究は少な いが,文献(68)∼(71)では,四次のバタワース型の帯域フィル タ及び帯域消去フィルタを対象として,その中心周波数を適応的 に制御するアルゴリズムが提案されるとともに,その収束特性 についても理論的に解析されている.しかしこの文献では,高Magnitude Frequency
Input
Frequency MagnitudeLow-order adaptive
band-pass filter
Magnitude Frequency Low SNROutput
Narrowband signal White noise (a)低次の可変帯域フィルタを用いた場合 Magnitude FrequencyInput
Frequency MagnitudeHigh-order adaptive
band-pass filter
Magnitude Frequency High SNROutput
Narrowband signal White noise (b)高次の可変帯域フィルタを用いた場合 図 9 高次の可変帯域フィルタによる出力信号の SN 比の改善(38) 次の可変フィルタを適応フィルタとして用いることはほぼ不可 能であるとも主張されていた.その理由は,フィルタの次数が大 きくなるにつれて伝達関数の数式が複雑になり,その複雑な伝 達関数に対して可変特性及び適応制御の仕組みを与えることが 非常に困難になるためである.これに対し筆者らは,文献(38) において,周波数変換における遅延素子の置き換えをブロック 図と数式の両方で考えることにより,任意の高次可変帯域・帯 域消去フィルタに対して勾配法に基づく適応アルゴリズムを簡 単な数式で与えることに成功している.そして,上述のとおり, 高次の可変フィルタを用いることによって出力信号の SN 比が 向上することを実験的に示している. このように,高次の可変フィルタを適応フィルタとして用い ることは可能になっているが,多くの課題も残されている.具体 的には,適応アルゴリズムの収束についての数学的な議論,収 束速度の改善,及び高次のフィルタを用いることによる量子化 誤差の増大への対策等が課題として挙げられる.これらの課題 は,筆者らの研究(72)∼(75)においてある程度報告されているが, 更なる検討が必要である.4. 4
その他の可変フィルタと適応信号処理
これまでに述べた研究の他にも,様々な可変フィルタが適応 信号処理へ応用されている.例えば文献(76)では,二次全域通 過フィルタの積に基づく伝達関数を適応フィルタとして用いる 手法を提案している.この手法は複数の未知正弦波を検出する 際に有効であり,一般的な方法(ノッチフィルタを縦続接続す る方法)よりも良好な性能が得られることが示されている.ま た文献(77)∼(79)では,帯域幅とノッチ利得の両方を可変とし たくし形フィルタが提案され,更にこのフィルタを複数の未知 正弦波検出へ応用し,従来法よりも優れた性能を得ている. この他,可変低域フィルタを適応信号処理へ応用する研究も 報告されている.ただしこの研究テーマでは,これまでに述べ たテーマよりも困難な問題があるため,報告されている研究成 果は少ない.なぜならば,これまでに述べた可変ノッチフィル タや可変帯域消去フィルタ等では,未知正弦波を見つけるとい う問題設定を与えることによって単峰性の評価関数を構成する ことができたが,可変低域フィルタでは,単峰性の評価関数を 構成できる問題設定を与えることが困難になるためである.こ れに対し文献(80),(81)では,低域通過信号の帯域端周波数を 検出するという問題設定を与え,かつ評価関数に重みを付ける というアプローチによって,単峰性の評価関数を構成でき所望 の信号処理を実現することに成功している.5.
お わ り に
本稿では,可変ディジタルフィルタに関する研究について,設 計・実現のテーマと応用のテーマを中心として概説した.設計・ 実現のテーマでは,伝達関数の変数変換による手法(特に,周 波数変換による手法)とフィルタ係数の多変数多項式近似によ る手法の二つが主流であることを述べ,それぞれの手法の詳細 を述べた.また,この二つの手法以外の研究成果についても言 及した.なお,本稿では一次元のフィルタ及び振幅特性を可変 とするフィルタのみを対象としており,多次元の可変フィルタ や可変非整数遅延フィルタ等の研究については割愛した.応用 のテーマに関する研究は多岐にわたるが,本稿では,適応信号 処理への応用に関する研究に絞って概説した. 可変ディジタルフィルタは,固定のディジタルフィルタと同 様に,古くから研究されてきたテーマである.それゆえに,現在では研究し尽くされたテーマであるとみなされることもある が,実際には本稿にて述べたとおり,現在でも幅広い分野にて 多数の研究成果が報告されている.また,文献(2)にて述べたこ とでもあるが,可変ディジタルフィルタの研究においても,設 計・実現・実装・応用それぞれの分野間でのつながりは決して強 くはないようである.例えば設計の分野では,3. 2 にて述べた とおり,多変数多項式近似に基づく手法が近年盛んに研究され ているが,筆者らの知る限り,この手法を適応信号処理へ応用 した研究はまだ報告されていない.したがって,多変数多項式 近似に基づく可変フィルタを用いた適応信号処理は,今後の大 きな研究テーマの一つであると考えられる.このように,様々 な分野に目を向けることによって,可変ディジタルフィルタの 研究がこれまで以上に発展するものと期待される. 文 献
(1) G. Stoyanov and M. Kawamata, “Variable digital fil-ters,” RISP Journal of Signal Processing, vol.1, no.4, pp.275–289, July 1997.
(2) 越田俊介,陶山健仁,“ディジタルフィルタの研究動向と課題—「良
い」ディジタルフィルタを作り,そして広めるためには?—,”
IE-ICE Fundamentals Review,vol.9,no.1,pp.24–36,July 2015.
(3) 中西功,“電子情報通信学会「知識ベース」1 群 9 編 ディジタ ル信号処理 3 章 適応信号処理,” 2011.
(4) A.G. Constantinides, “Spectral transformations for dig-ital filters,” Proc. IEE, vol.117, no.8, pp.1585–1590, Aug. 1970.
(5) S.K. Mitra, Y. Neuvo, and H. Roivainen, “Design of re-cursive digital filters with variable characteristics,” Int. J. Cir. Theor. Appl., vol.18, pp.107–119, 1990. (6) N. Murakoshi, E. Watanabe, and A. Nishihara, “A
syn-thesis of variable IIR digital filters,” IEICE Trans. Fun-damentals, vol.E75-A, no.3, pp.362–368, March 1992. (7) H. Matsukawa and M. Kawamata, “Design of variable
digital filters based on state-space realizations,” IEICE Trans. Fundamentals, vol.E84-A, no.8, pp.1822–1830, Aug. 2001.
(8) H.-J. Jang and M. Kawamata, “Realization of high ac-curacy 2-D variable IIR digital filters,” IEICE Trans. Fundamentals, vol.E85-A, no.10, pp.2293–2301, Oct. 2002.
(9) E. Watanabe, M. Ito, N. Murakoshi, and A. Nishi-hara, “A synthesis of variable wave digital filters,” IE-ICE Trans. Fundamentals, vol.E77-A, no.1, pp.263–271, Jan. 1994. (10) 渡部英二,石塚博康,西原明法,柳澤健,“ステップ応答を用 いた可変特性ディジタルフィルタ,” 信学技報,no.CAS97-93, pp.49–56,1998. (11) 福島健介,渡部英二,西原明法,“ステップ応答を用いた可変特 性ディジタルフィルタの収束特性の高速化に関する研究,” 信学 技報,no.CAS2004-66,pp.37–42,2005.
(12) S. Koshita, M. Abe, and M. Kawamata, “Realization of variable low-pass state-space digital filters using step responses,” Proc. IEEE Int. Symp. Commun. Inf. Tech. (ISCIT), pp.580–584, Oct. 2010.
(13) 越田俊介,阿部正英,川又政征,“級数近似に基づく状態空間 形の可変低域通過ディジタルフィルタ,” 信学ソ大,no.AS-1-1, Sept. 2014.
(14) S.J. Darak, V.A. Prasad, and E.M.-K. Lai, “Efficient implementation of reconfigurable warped digital filters with variable low-pass, high-pass, bandpass, and band-stop responses,” IEEE Trans. VLSI Syst., vol.21, no.6, pp.1165–1169, June 2013.
(15) R. Zarour and M.M. Fahmy, “A design technique for
variable digital filters,” IEEE Trans. Circuits Syst., vol.36, pp.1473–1478, Nov. 1989.
(16) T.-B. Deng, “Design of recursive 1-D variable filters with guaranteed stability,” IEEE Trans. Circuits Syst. II, vol.44, no.9, pp.689–695, Sept. 1997.
(17) C.K.S. Pun, S.C. Chan, K.S. Yeung, and K.L. Ho, “On the design and implementation of FIR and IIR digi-tal filters with variable frequency characteristics,” IEEE Trans. Circuits Syst. II, vol.49, no.11, pp.689–703, Nov. 2002.
(18) S.C. Chan, C.K.S. Pun, and K.L. Ho, “A new method for designing FIR filters with variable characteristics,” IEEE Signal Process. Lett., vol.11, no.2, pp.274–277, Feb. 2004.
(19) H. Johansson and P. L¨owenborg, “On linear-phase FIR filters with variable bandwidth,” IEEE Trans. Circuits Syst. II, vol.51, no.4, pp.181–184, April 2004.
(20) T.-B. Deng, “Closed-form design and efficient imple-mentation of variable digital filters with simultaneously tunable magnitude and fractional delay,” IEEE Trans. Signal Process., vol.52, no.6, pp.1668–1681, June 2004. (21) 新保友成,杉田泰則,相川直幸,木村隆,若狭由喜夫,森地徹,
“阻止域の一部が可変な FIR フィルタの設計法,” 信学論 (A), vol.J87-A,no.12,pp.1511–1517,Dec. 2004.
(22) K.M. Tsui and S.C. Chan, “Design of complex-valued variable FIR digital filters and its application to the realization of arbitrary sampling rate conversion for complex signals,” IEEE Trans. Circuits Syst. II, vol.52, no.7, pp.424–428, July 2005.
(23) H.H. Dam, A. Cantoni, K.L. Teo, and S. Nordholm, “Variable digital filter with least-square criterion and peak gain constraints,” IEEE Trans. Circuits Syst. II, vol.54, no.1, pp.24–28, Jan. 2007.
(24) 高橋慧,相川直幸,若狭由喜夫,中谷誠,“複数阻止域可変
FIRフィルタ,” 信学論 (A),vol.J90-A,no.10,pp.767–770,
Oct. 2007.
(25) H.H. Dam, A. Cantoni, S. Nordholm, and K.L. Teo, “Variable digital filter with group delay flatness specifi-cation or phase constraints,” IEEE Trans. Circuits Syst. II, vol.55, no.5, pp.442–446, May 2008.
(26) T. Miyata and N. Aikawa, “A design method for vari-able linear-phase FIR filters with changing multifac-tors for checkweighers,” IEICE Trans. Fundamentals, vol.E93-A, no.8, pp.1400–1407, Aug. 2010.
(27) 杉田泰則,吉川敏則,相川直幸,“阻止域可変低遅延 FIR フィルタ の準等リプル近似,” 信学論 (A),vol.J93-A,no.12,pp.795– 804,Dec. 2010. (28) 姥山奈菜子,宮田統馬,相川直幸,“阻止域の複数要素が可変な IIRディジタルフィルタの設計法,” 信学論 (A),vol.J94-A, no.12,pp.1038–1042,Dec. 2011.
(29) T. Miyata and N. Aikawa, “A design of FIR filters with variable notches considering reduction method of polynomial coefficients for real-time signal processing,” Int J. Innovative Computing, Information and Control, vol.9, no.9, pp.3527–3536, Sept. 2013.
(30) S.J. Darak, A.P. Vinod, E.M.-K. Lai, J. Palicot, and H. Zhang, “Linear-phase VDF design with unabridged bandwidth control over the Nyquist band,” IEEE Trans. Circuits Syst. II, vol.61, no.6, pp.428–432, June 2014. (31) C.W. Farrow, “A continuously variable digital delay
el-ement,” Proc. IEEE Int. Symp. Circuits Syst. (ISCAS), pp.2641–2645, June 1988.
(32) G. Stoyanov, I. Uzunov, and M. Kawamata, “Design and realization of variable IIR digital filters as a cas-cade of identical subfilters,” IEICE Trans. Fundamen-tals, vol.E84-A, no.8, pp.1831–1839, Aug. 2001. (33) Y.J. Yu, Y.C. Lim, and D. Shi, “Low-complexity design
of variable bandedge linear phase FIR filters with sharp transition band,” IEEE Trans. Signal Process., vol.57, no.4, pp.1328–1338, April 2009.
(34) Y.J. Yu and W.J. Xu, “Mixed-radix fast filter bank ap-proach for the design of variable digital filters with
si-multaneously tunable bandedge and fractional delay,” IEEE Trans. Signal Process., vol.60, no.1, pp.100–111, Jan. 2012.
(35) W.J. Xu, Y.J. Yu, and H. Johansson, “Improved filter bank approach for the design of variable bandedge and fractional delay filters,” IEEE Trans. Circuits Syst. I, vol.61, no.3, pp.764–777, March 2014.
(36) P.A. Regalia, S.K. Mitra, and P.P. Vaidyanathan, “The digital all-pass filter: A versatile signal processing building block,” Proc. IEEE, vol.76, no.1, pp.19–37, Jan. 1988.
(37) J.A. Chambers and A.G. Constantinides, “Frequency tracking using constrained adaptive notch filters syn-thesised from allpass sections,” Proc. IEE (part F), vol.137, no.6, pp.475–481, Dec. 1990.
(38) S. Koshita, Y. Kumamoto, M. Abe, and M. Kawa-mata, “Adaptive IIR band-pass/band-stop filtering us-ing high-order transfer function and frequency transfor-mation,” Interdisciplinary Information Sciences, vol.19, no.2, pp.163–172, Nov. 2013.
(39) P.A. Regalia, Adaptive IIR Filtering in Signal Process-ing and Control, Marcel Dekker, 1995.
(40) P.A. Regalia, “An improved lattice-based adaptive IIR notch filter,” IEEE Trans. Signal Process., vol.39, no.9, pp.2124–2128, Sept. 1991.
(41) P.A. Regalia, “A complex adaptive notch filter,” IEEE Signal Process. Lett., vol.17, no.11, pp.937–940, Nov. 2010.
(42) S. Nakamura, S. Koshita, M. Abe, and M. Kawamata, “A new adaptive notch filtering algorithm based on nor-malized lattice structure with improved mean update term,” IEICE Trans. Fundamentals, vol.E98-A, no.7, pp.1482–1493, July 2015.
(43) K. Matsuura, E. Watanabe, and A. Nishihara, “Adap-tive line enhancers on the basis of least-squares algo-rithm for a single sinusoid detection,” IEICE Trans. Fundamentals, vol.E82-A, no.8, pp.1536–1543, Aug. 1999.
(44) A. Kawamura, Y. Itoh, J. Okello, M. Kobayashi, and Y. Fukui, “Parallel composition based adaptive notch filter: Performance and analysis,” IEICE Trans. Fun-damentals, vol.E87-A, no.7, pp.1747–1755, July 2004. (45) A. Kawamura, Y. Iiguni, and Y. Itoh, “An adaptive
al-gorithm with variable step-size for parallel notch filter,” IEICE Trans. Fundamentals, vol.E89-A, no.2, pp.511– 519, Feb. 2006.
(46) Y. Sugiura, “A fast and accurate adaptive notch filter using a monotonically increasing gradient,” Proc. Eur. Signal Process. Conf. (EUSIPCO), pp.1756–1760, Sept. 2014.
(47) A. Mvuma and S. Nishimura, “Steady-state analysis of a simplified lattice-based adaptive IIR notch filter,” IE-ICE Trans. Fundamentals, vol.E83-A, no.6, pp.965–972, June 2000. (48) 野口佑稀,越田俊介,阿部正英,川又政征,“SLA に基づく適 応ノッチフィルタの定常状態における MSE の閉じた形での導 出,” 信学ソ大,no.A-4-12,p.71,Sept. 2015. (49) 野口佑稀,越田俊介,阿部正英,川又政征,“ACLA に基づく 適応ノッチフィルタの定常状態における MSE の閉じた形での導 出,” 第 30 回信号処理シンポジウム講演論文集,pp.428–433, Nov. 2015.
(50) Y. Sugiura, A. Kawamura, and Y. Iiguni, “Performance analysis of an inverse notch filter and its application to F0 estimation,” Circuits and Systems, vol.4, no.1,
pp.117–122, Jan. 2013.
(51) 中村洋平,川村新,飯國洋二,“逆ノッチフィルタと線形予測器 を用いた適応ノッチゲインの実現,” 電学論 C,vol.36,no.2, pp.108–115,Feb. 2016.
(52) A. Nehorai, “A minimal parameter adaptive notch fil-ter with constrained poles and zeros,” IEEE Trans. Acoust., Speech, Signal Process., vol.ASSP-33, no.4, pp.983–996, Aug. 1985.
(53) S.-C. Pei and C.-C. Tseng, “Adaptive IIR notch fil-ter based on least mean p-power error crifil-terion,” IEEE Trans. Circuits Syst. II, vol.40, no.8, pp.525–529, Aug. 1993.
(54) Y. Xiao, Y. Takeshita, and K. Shida, “Steady-state analysis of a plain gradient algorithm for a second-order adaptive IIR notch filter with constrained poles and zeros,” IEEE Trans. Circuits Syst. II, vol.48, no.7, pp.733–740, July 2001.
(55) Y. Xiao, Y. Takeshita, and K. Shida, “Tracking proper-ties of a gradient-based second-order adaptive IIR notch filter with constrained poles and zeros,” IEEE Trans. Signal Process., vol.50, no.4, pp.878–888, April 2002. (56) Y. Xiao, L. Ma, K. Khorasani, and A. Ikuta,
“Statis-tical performance of the memoryless nonlinear gradient algorithm for the constrained adaptive IIR notch filter,” IEEE Trans. Circuits Syst. I, vol.52, no.8, pp.1691– 1702, Aug. 2005.
(57) Y.C. Lim, Y.X. Zou, and N. Zheng, “A piloted adaptive notch filter,” IEEE Trans. Signal Process., vol.53, no.4, pp.1310–1323, April 2005.
(58) R. Punchalard, “Mean square error analysis of un-biased modified plain gradient algorithm for second-order adaptive IIR notch filter,” Signal Process., vol.92, no.11, pp.2815–2820, Nov. 2012.
(59) R. Punchalard, “A modified inverse tangent based adaptive algorithm for a second-order constrained adap-tive IIR notch filter,” Signal Process., vol.94, pp.350– 358, Jan. 2014.
(60) H. Munakata, S. Koshita, M. Abe, and M. Kawamata, “Performance comparison of adaptive notch filters with respect to the output power due to the white noise in-put,” Proc. Int. Workshop on Smart Info-Media Sys-tems in Asia (SISA), pp.30–34, Aug. 2015.
(61) N.I. Cho, C.-H. Choi, and S.U. Lee, “Adaptive line en-hancement by using an IIR lattice notch filter,” IEEE Trans. Signal Process., vol.37, no.4, pp.585–589, April 1989.
(62) N.I. Cho and S.U. Lee, “On the adaptive lattice notch filter for the detection of sinusoids,” IEEE Trans. Cir-cuits Syst. II, vol.40, no.7, pp.405–416, July 1993. (63) K.W. Martin and M.T. Sun, “Adaptive filters suitable
for real-time spectral analysis,” IEEE Trans. Circuits Syst., vol.33, no.2, pp.218–229, Feb. 1986.
(64) T. Kwan and K. Martin, “Adaptive detection and en-hancement of multiple sinusoids using a cascade IIR fil-ter,” IEEE Trans. Circuits Syst., vol.36, no.7, pp.937– 947, July 1989.
(65) M.R. Petraglia, J.J. Shynk, and S.K. Mitra, “Stabil-ity bounds and steady-state coefficient variance for a second-order adaptive IIR notch filter,” IEEE Trans. Signal Process., vol.42, no.7, pp.1841–1845, July 1994. (66) Y. Xiao, Y. Tadokoro, and Y. Kobayashi, “A new mem-oryless nonlinear gradient algorithm for a second-order adaptive IIR notch filter and its performance analysis,” IEEE Trans. Circuits Syst. II, vol.45, no.4, pp.462–472, April 1998.
(67) V. DeBrunner and S. Torres, “Multiple fully adaptive notch filter design based on allpass sections,” IEEE Trans. Signal Process., vol.48, no.2, pp.550–552, Feb. 2000.
(68) R.V. Raja Kumar and R.N. Pal, “A gradient algorithm for the center-frequency adaptive filters,” Proc. IEEE, vol.73, no.2, pp.371–372, Feb. 1985.
(69) R.V. Raja Kumar and R.N. Pal, “Recursive center-frequency adaptive filters for the enhancement of band-pass signals,” IEEE Trans. Acoust., Speech, Signal Pro-cess., vol.34, no.3, pp.633–637, June 1986.
(70) R.V. Raja Kumar and R.N. Pal, “Performance analy-sis of the recursive center-frequency adaptive bandpass filters,” Signal Process., vol.17, no.2, pp.105–118, June 1989.
(71) R.V. Raja Kumar and R.N. Pal, “Tracking of bandpass signals using center-frequency adaptive filters,” IEEE Trans. Acoust., Speech, Signal Process., vol.38, no.10, pp.1710–1721, Oct. 1990. (72) 三好啓太,越田俊介,阿部正英,川又政征,“状態空間形の可変帯 域阻止フィルタを用いた狭帯域雑音除去,” 信学総大,no.A-4-31, p.109,March 2011. (73) 越田俊介,熊本裕樹,阿部正英,川又政征,“縦続形の可変帯域 阻止フィルタを用いた狭帯域雑音除去システム,” 第 26 回信号 処理シンポジウム講演論文集,pp.664–669,Nov. 2011. (74) 坂本英史,越田俊介,阿部正英,川又政征,“振幅特性を考慮した 高次の可変帯域阻止フィルタに基づく狭帯域雑音除去システム,” 情報処理学会全国大会講演論文集,no.4T-6,pp.2–487–2–488, March 2013.
(75) S. Koshita, K. Miyoshi, M. Abe, and M. Kawa-mata, “High-performance variable band-pass/band-stop state-space digital filters using gramian-preserving frequency transformation,” Digital Signal Process., vol.27, pp.175–184, April 2014.
(76) J.E. Cousseau, S. Werner, and P.D. Donate, “Factorized all-pass based IIR adaptive notch filters,” IEEE Trans. Signal Process., vol.55, no.11, pp.5225–5236, Nov. 2007. (77) Y. Sugiura, A. Kawamura, and Y. Iiguni, “A comb fil-ter design method using linear phase FIR filfil-ter,” IEICE Trans. Fundamentals, vol.E95-A, no.8, pp.1310–1316, Aug. 2012.
(78) Y. Sugiura, A. Kawamura, and Y. Iiguni, “An adaptive comb filter with flexible notch gain,” IEICE Trans. Fun-damentals, vol.E95-A, no.11, pp.2046–2048, Nov. 2012. (79) Y. Sugiura, A. Kawamura, and Y. Iiguni, “A comb filter with adaptive notch gain and bandwidth,” IE-ICE Trans. Fundamentals, vol.E96-A, no.4, pp.790–795, April 2013.
(80) K. Yamaguchi, E. Watanabe, and A. Nishihara, “Adap-tive lowpass filters,” Proc. IEEE Asia-Pacific Conf. Cir-cuits Syst. (APCCAS), pp.510–513, Dec. 2004. (81) 金秀成,渡部英二,西原明法,“高速項安定適応低域通過フィル タ,” 信学技報,CAS2006-108, SIP2006-209, CS2006-125, pp.75–80,March 2007. (CAS 研究会提案,平成 28 年 3 月 21 日受付 4 月 23 日最終受付) 越田俊介(正員) 2006東北大大学院工学研究科博士後期課程了.同 年同大学・工・助手,2007 同助教.現在に至る.ディ ジタルフィルタ,適応信号処理,線形システム理論, 回路理論に関する研究に従事.第 19 回回路とシス テム(軽井沢)ワークショップ奨励賞,平 19 年度本 会学術奨励賞各受賞.IEEE,計測自動制御学会各 会員,博士(工学). 阿部正英(正員:シニア会員) 1999東北大大学院工学研究科博士後期課程了.同 年同大学・工・助手,2004 同講師,2006 同助教授 を経て,2007 同准教授,現在に至る.適応信号処理, 遺伝的アルゴリズム,画像・映像処理に関する研究 に従事.1994 本会東北支部学生員及び准員奨励賞, 1998本会学術奨励賞,1998 独創性を拓く先端技術 学生論文フジテレビジョン賞,2001 第 13 回回路と システム(軽井沢)ワークショップ奨励賞,2008JGN2 アワード(アプリ ケーション)賞,2012 本会貢献賞各受賞.IEEE,計測自動制御学会,信 号処理学会各会員,博士(工学). 川又政征(正員:フェロー) 1982東北大大学院工学研究科博士後期課程了.同 年同大学・工・電子・助手,1988 同大学・工・情報 工・助教授,1995 同大学・工・通信工・教授を経て, 1997同大大学院工学研究科電子工学専攻教授,現在 に至る.一次元及び多次元ディジタルフィルタの設 計,線形システム理論,画像映像処理に関する研究 に従事.1984 計測自動制御学会論文賞,1996 計測 自動制御学会著述賞,1997 第 11 回日本 IBM 科学賞各受賞.IEEE,計 測自動制御学会,情報処理学会,映像メディア学会,信号処理学会各会員, 工博.