1
第
5
章
偏微分
5.1
2
変数関数
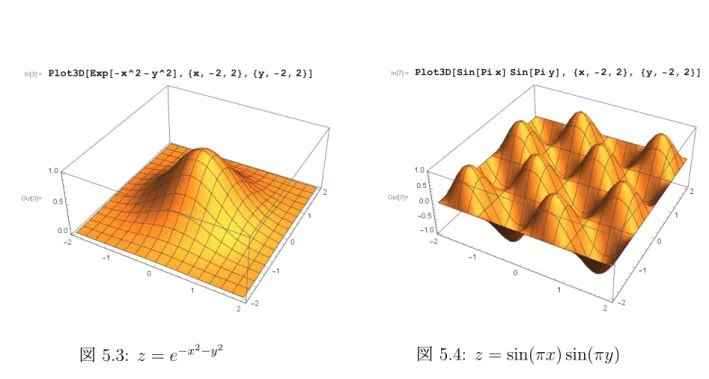
D を xy 平面の部分集合とする.D に含まれる各点 (x, y) に対して実数 z = f (x, y) が対応し ているとき,f を D を定義域とする (2 変数) 関数という.また,(x, y, z) を空間内にプロットし たものを f のグラフという. R 上の関数のグラフが曲線になるように,2 変数関数のグラフは曲面になる. 例 5.1. z =√1− x2− y2は,円板{(x, y); x2+y2 ≦ 1}を定義域とする関数である.x2+y2+z2 = 1 より,グラフは原点中心,半径 1 の球面の z≧ 0 の部分である. 例 5.2. (x, y)∈ R2に対して z =−x 2− y 3+ 1 とおく.このとき,グラフは 3 点 (2, 0, 0), (0, 3, 0), (0, 0, 1) を通る平面である. 注意 5.3 (平面の方程式). (3 次元) 空間内の平面は,その法線ベクトル (平面と垂直なベクトル) と通る点を 1 つ決めればただ一つに定まる.法線ベクトルが (a, b, c) で A : (x0, y0, z0) を通る平 面を考える.平面上の点を P : (x, y, x) とすると, ⃗AP と法線ベクトルが直交するので a(x− x0) + b(y− y0) + c(z− z0) = 0 がこの平面を与える方程式である. したがって,一般に平面の方程式は ax + by + cz = d (a, b, c, d は定数) という形になる. 参考のため,下の関数の曲面の図を与える.両方のグラフに極値 (ある近傍内で最小または 最大) があるが,見えるだろうか.In[1]:= Plot3D@4 * x ^ 2 + x * y + 2 * y ^ 2, 8x, -2, 2<, 8y, -3, 3<D Out[1]= -2 -1 0 1 2 -2 0 2 0 10 20 30 40 図 5.1: z = 4x4+ xy + y2
In[6]:= Plot3D@x ^ 3 * y + 4 * x * y ^ 3 - x * y, 8x, -1.5, 1.5<, 8y, -1.5, 1.5<D
Out[6]= -1 0 1 -1 0 1 -5 0 5 図 5.2: z = x3y + 4xy3− xy
In[3]:= Plot3D[Exp[- x ^ 2 - y ^ 2], {x, - 2, 2}, {y, - 2, 2}]
Out[3]=
図 5.3: z = e−x2−y2
In[7]:= Plot3D[Sin[Pi x] Sin[Pi y], {x, - 2, 2}, {y, - 2, 2}]
Out[7]=
5.2. 2 変数関数の連続性 3
5.2
2
変数関数の連続性
関数の連続性について述べる. 定義 5.1. D を平面 R2の領域とする.D 上の関数 z = f (x, y) が (a, b)∈ D で連続とは,(a, b) に収束するすべての D 内の点列{(xn, yn)}∞n=1 に対して f (xn, yn)→ f(a, b) (n → ∞) が成り立 つことをいう. 「すべての点列に対して」という点が重要であり,近づき方が多いため,1 変数の場合より 複雑になる. 例 5.4. f (x, y) = x2 x2+ y2 とすると, y 軸に沿って (x, y)→ (0, 0) とすると,f(0, y) = 0 (y ̸= 0) より f(x, y) → 0 x 軸に沿って (x, y)→ (0, 0) とすると,f(x, 0) = 1 (x ̸= 0) より f(x, y) → 1 直線 y = x に沿って (x, y)→ (0, 0) とすると,f(x, x) = 1 2(x̸= 0) より f(x, y) → 1 2 となり,f (0, 0) をどのように定めても連続にはならない.5.3
偏導関数
5.3.1
偏導関数
z = f (x, y) を xy 平面上の領域 D 上の関数とするとき,(a, b)∈ D に対して lim h→0 f (a + h, b)− f(a, b) h が存在するとき f は (a, b) において x について偏微分可能であるという.この極限値を ∂f ∂x(a, b) または fx(a, b) と書く.これは,y = b を固定して x に対して f (x, b) を対応する関数を考え,x = a における 微分係数を考えているということである. たとえば,f (x, y) = x2y3であれば, ∂f ∂x(a, b) = limh→0 (a + h)2b3− a2b3 h = limh→0 (a + h)2− a2 h b 3 = 2ab3 となる.同様に,y に対して f (a, y) を対応する y の関数を考えるとき,y = b において微分可能であ れば,つまり lim k→0 f (a, b + k)− f(b) k = limy→b f (a, y)− f(a, b) y− b が存在するとき,f は (a, b) において y に関して偏微分可能であるといい,この極限値を ∂f
∂y(a, b) または fy(a, b)
と書く. さらに,f が定義域 D 上のすべての点において x (または y) に関して偏微分可能ならば,f は D 上 x (または y) に関して偏微分可能であるという. このとき, D∋ (x, y) に対して∂f ∂x(x, y) = fx(x, y) を対応させる関数, D∋ (x, y) に対して∂f ∂y(x, y) = fy(x, y) を対応させる関数, が定まる.これらを x (または y) に関する偏導関数という. x に関する偏導関数を求めるには,y を固定して (定数と考えて) f を x のみの関数と考えて x に関して微分すればよい.逆に,x を固定して (定数と考えて) f を y のみの関数と考えて y に 関して微分すれば y に関する偏導関数が得られる. f の偏導関数を求めることを,f を偏微分するという.
5.3. 偏導関数 5 例 5.5. f (x, y) = x2y3とすると, ∂f ∂x(x, y) = fx(x, y) = limh→0 f (x + h, y)− f(x, y) h = limh→0 (x + h)2y3− x2y3 h = lim h→0 (x + h)2− x2 h y 3 = 2xy3 ∂f ∂y(x, y) = fy(x, y) = limh→0 f (x, y + k)− f(x, y) k = limh→0 x2(y + k)3− x2y3 h = lim h→0x 2(y + k) 3− y3 k = 3x 2y2. 演習問題 5.1. (1) f (x, y) = eax+byの x, y に関する偏導関数 f x, fyを求めよ. (2) f (x, y) = eaxcos(by) の x, y に関する偏導関数を求めよ. (3) f (x, y) = eaxsin(x + y) の x, y に関する偏導関数を求めよ. 偏微分の計算は,x, y の一方の変数を固定して (定数と考えて) 他方の変数のみの関数として 微分するのだから,1 変数の微分に関する公式 (関数の積の微分や合成関数の微分など) はすべ て使える. 演習問題 5.2. (1) f (x, y) = arctan(y x ) の x, y に関する偏導関数 fx, fyを求めよ. (2) f (x, y) = xy (x > 0, y∈ R) の x, y に関する偏導関数 f x, fyを求めよ. 解答例.(1) tan f (x, y) = y xの両辺を x について偏微分すると, 1 cos2f (x, y)fx(x, y) = ∂ ∂x (y x ) =− y x2 となる. 1 cos2f (x, y) = 1 + tan 2 f (x, y) = 1 + y 2 x2 = x2+ y2 x2 より x2+ y2 x2 fx(x, y) = − y x2 とな り,fx(x, y) =− y x2+ y2 となる. tan f (x, y) = y xの両辺を x について偏微分すると, 1 cos2f (x, y)fy(x, y) = ∂ ∂y (y x ) = 1 x となる. 1 cos2f (x, y) = x2+ y2 x2 より x2+ y2 x2 fy(x, y) = 1 x となり,fy(x, y) = x x2+ y2 となる.
(2) log(f (x, y)) = y log x の両辺を x, y で偏微分すると,それぞれ
fx(x, y) f (x, y) = y x, fy(x, y) f (x, y) = log x となる.したがって,fx, fyは次のように得られる: fx(x, y) = y xx y = yxy−1, f y(x, y) = xylog x. 演習問題 5.3. 2 変数関数 z = f (x, y) が 1 変数関数 h を用いて表されている場合を考える. (1) f (x, y) = h(x2+ y2) のとき,yf x = xfyが成り立つことをを示せ. (2) f (x, y) = h (x y ) のとき,xfx+ yfy = 0 が成り立つことを示せ.
5.3.2
偏微分係数の意味と接平面
1 変数関数 y = f (x) の微分係数 f′(a) は,曲線 y = f (x) 上の点 (a, f (a)) における接線の傾き を表していた.偏微分についても同様であることを見て,接平面について述べる. 教科書 131 ページの図を見て欲しい.左の図は,曲面 z = f (x, y) の平面 y = b による切り口 である曲線 z = f (x, b) を考えると,曲面上の点 (a, b, f (a, b)) における接線が x y z = a b f (a, b) + t 1 0 fx(a, b) によって与えられることを示している. 一方,左の図は,曲面 z = f (x, y) の平面 x = a による切り口である曲線 z = f (a, y) を考え ると,曲面上の点 (a, b, f (a, b)) における接線が x y z = a b f (a, b) + t 0 1 fy(a, b) によって与えられることを示している. これらの直線の方向ベクトル 1 0 fx(a, b) , 0 1 fy(a, b) を (a, b, f(a, b)) を始点として考えると 接平面上にあるので,接平面の法線ベクトル ℓ m n はこれらと直交する.つまり, ℓ + nfx(a, b) = 0, m + nfy(a, b) = 0 が成り立つ.したがって,接平面の法線ベクトルとして fx(a, b) fy(a, b) −1 をとることができ,曲面 z = f (x, y) 上の点 (a, b, f (a, b)) における接平面の方程式は,直線上の点 (x, y, z) に対して x− a y− b z− c と法線ベクトルが直交するので,
fx(a, b)(x− a) + fy(a, b)(y− b) + (−1)(z − f(a, b)) = 0,
つまり,z = f (a, b) + fx(a, b)(x− a) + fy(a, b)(y− b) によって与えられる.
演習問題 5.4. 楕円面 z = f (x, y) =√1− x42 − y92 上の点 (1,√3,√615) における接平面の方程式 を求めよ.
5.4. 高階偏導関数 7
5.4
高階偏導関数
2 変数関数 z = f (z, y) の偏導関数∂f ∂x = fx, ∂f ∂y = fyがまた偏微分可能のとき,これらをさら に偏微分することにより (fx)x = ∂ ∂x (∂f ∂x ) , (fx)y = ∂ ∂y (∂f ∂x ) , (fy)x = ∂ ∂x (∂f ∂y ) , (fy)y = ∂ ∂y (∂f ∂y ) が得られる.これらを簡単に fxx または ∂2f ∂x2, fxy または ∂2f ∂y∂x, fyx または ∂2f ∂x∂y, fyy または ∂2f ∂y2 と書く. 以下,同様に高階の偏導関数 fxxx, fxxyなども定義される. 演習問題 5.5. (1) f (x, y) = eax+byに対して,f xx, fxy, fyx, fyy を求め,fxy = fyxを確かめよ. (1) f (x, y) = eaxcos(by) に対して,f xx, fxy, fyx, fyyを求め,fxy = fyxを確かめよ. 命題 5.6. f (x, y) が 2 階偏微分可能で 2 階偏導関数 fxy, fyxが連続であれば,これらは一致する. 証明.|h|, |k| が小さいとして,δ = (f(x + h, y + k) − f(x + h, y)) − (f(x, y + k) − f(x, y)) とお く.y, k を固定して x の関数 ϕ(x) = f (x, y + k)− f(x, y) を考えると,δ = ϕ(x + h)− ϕ(x) が成り立つので,平均値の定理より δ = ϕ′(c1)h ={fx(c1, y + k)− fx(c1, y)}h が成り立つような c1が x と x + h の間に存在する. この右辺を y の関数と考えて再び平均値の定理を用いると, δ = fxy(c1, c2)hk をみたす c2が y と y + k の間に存在する.仮定より fxyは連続なので, lim h,k→0 δ hk = fxy(x, y) が成り立つ. 次に,δ = (f (x + h, y + k)− f(x, y + k)) − (f(x + h, y) − f(x, y)) と書き直して,y の関数 ψ(y) = f (x + h, y)− f(x, y)を考えると,δ = ψ(y + k)− ψ(y) が成り立つ.よって,平均値の定理より, δ = ψ′(d1)k ={fy(x + h, d1)− fy(x, d1)}k が成り立つような d1が y と y + k の間に存在する. この右辺を x の関数と考えて平均値の定理を用いると δ = fyx(d2, d1)hk をみたす d2が x と x + h の間に存在する.仮定より fyxは連続なので, lim h,k→0 δ hk = fyx(x, y) が成り立つ. 2 つを合わせて,fxy(x, y) = fyx(x, y) を得る. □ 演習問題 5.6. 次の関数が fxx+ fyy = 0 をみたすことを示せ.(このような関数を調和関数と いう.) (1) f (x, y) = log(x2+ y2), (2) f (x, y) = x x2+ y2, (3) f (x, y) = e x2−y2 sin(2xy) 演習問題 5.7. a∈ R とする.(t, x), t > 0, x ∈ R の関数 f(t, x) を f (t, x) = √1 te −(x−a)2 2t によって定める.このとき,ft= 1 2fxxが成り立つことを示せ.
5.5. 合成関数の微分 (連鎖律) 9
5.5
合成関数の微分
(
連鎖律
)
まずは,例から始める.合成関数の微分の公式 d dtg(ϕ(t)) = (g(ϕ(t)) ′ = g′(phi(t))phi′(t) を思い出しておく. 例 5.7. (1) 次は,積の微分,合成関数の微分の公式より分かる: d dt ( (pt + q)3(αt + β)4)= 3p(pt + q)2(αt + β)4+ 4α(pt + q)3(αt + β)3. (2) 少し一般化して,ϕ(t), ψ(t) を微分可能な関数として,関数 F (t) = ϕ(t)3ψ(t)2の導関数を求 める.これは,積の微分,合成関数の微分の公式より F′(t) = (ϕ(t)3)′ψ(t)2+ ϕ(t)3(ψ(t)2)′ = 3ϕ(t)2ϕ′(t)ψ(t)2+ ϕ(t)3· 2ψ(t)ψ′(t) となる. f (x, y) = x3y2とおくと F (t) = f (ϕ(t), ψ(t)) であり,f x = 3x2y2, fy = x3· 2y より F′(t) = d dtf (ϕ(t), ψ(t)) = fx(ϕ(t), ψ(t))· ϕ ′(t) + f y(ϕ(t), ψ(t))· ψ′(t) が成り立っていることが分かる. 定理 5.8 (連鎖律). f (x, y) が R2上の微分可能な関数であって,ϕ(t), ψ(t) が t ∈ R に関する 微分可能な関数であれば,合成関数 F (t) = f (ϕ(t), ψ(t)) は t に関して微分可能であり次が成り 立つ: d dtF (t) = d dtf (ϕ(t), ψ(t)) = fx(ϕ(t), ψ(t))· ϕ ′(t) + f y(ϕ(t), ψ(t))· ψ′(t). 証明. 1 変数関数の場合の合成関数の微分と同じ考えで, F (t + h)− F (t) h = f (ϕ(t + h), ψ(t + h))− f(ϕ(t), ψ(t)) h の h→ 0 としたときの極限を計算する.ここでは,直感的に分かりやすい説明をここでは与え る.詳細は,教科書 134 ページを参照のこと. まず, f (ϕ(t + h), ψ(t + h))− f(ϕ(t), ψ(t)) h = f (ϕ(t + h), ψ(t + h))− f(ϕ(t), ψ(t + h)) h + f (ϕ(t), ψ(t + h))− f(ϕ(t), ψ(t)) hと変形する.k1 = ϕ(t + h)− ϕ(t), k2 = ψ(t + h)− ψ(t) とおく.これらは h → 0 のとき 0 に収 束するので, f (ϕ(t + h), ψ(t + h))− f(ϕ(t), ψ(t)) h = f (ϕ(t)) + k1, ψ(t + h))− f(ϕ(t), ψ(t + h)) k1 · ϕ(t + h)− ϕ(t) h +f (ϕ(t), ψ(t) + k2)− f(ϕ(t), ψ(t)) k2 · ψ(t + h)− ψ(t) h → ∂f ∂x(ϕ(t), ψ(t))· ϕ ′(t) + ∂f ∂y(ϕ(t), ψ(t))· ψ ′(t) となる1. 演習問題 5.8. f (x, y) = y2exのとき,F (t) = f (cos t, sin t) の t に関する微分を連鎖律を用いて 計算せよ.また,F (t) = ecos tsin2t の導関数を求め,上の結果と一致することを示せ. 演習問題 5.9. f (x, y) が 2 階微分可能,ϕ(t), ψ(t) も t に関して 2 階微分可能のとき,合成関数 F (t) = f (ϕ(t), ψ(t)) に対して,次が成り立つことを示せ: F′′(t) =fxx(ϕ(t), ψ(t))· (ϕ′(t))2+ fx(ϕ(t), ψ(t))ϕ′′(t) + 2fxy(ϕ(t), ψ(t))· ϕ′(t)ψ′(t) + fyy(ϕ(t), ψ(t))· (ψ′(t))2+ fy(ϕ(t), ψ(t))ψ′′(t). 1ϕ(t + h)− ϕ(t) = 0 または ψ(t + h) − ψ(t) = 0 となる場合もあるので,上の議論は不十分であるが,本質的 は上の変形である.気持ち悪いと感じる人は,教科書のように平均値の定理を用いるとよい.
5.5. 合成関数の微分 (連鎖律) 11 次に,x, y が 2 変数の関数として表されている場合を考える.2 変数関数 ϕ, ψ を用いて, x = ϕ(u, v), y = ψ(u, v). と表されているとして,f (ϕ(u, v), ψ(u, v)) の u, v に関する偏導関数を与える. u に関する偏導関数は,v を定数と考えて微分するのだから,上に述べた連鎖律と同様に次が 分かる.v に関する偏導関数についても,同じである. 定理 5.9 (連鎖律). f (x, y) が R2上の微分可能な関数であって,ϕ(u, v), ψ(u, v) が u, v ∈ R に
関する微分可能な関数であれば,合成関数 F (u, v) = f (ϕ(u, v), ψ(u, v)) は u, v に関して偏微分 可能であり次が成り立つ:
∂
∂uf (ϕ(u, v), ψ(u, v)) = fx(ϕ(u, v), ψ(u, v))· ∂ϕ
∂u(u, v) + fy(ϕ(u, v), ψ(u, v))· ∂ψ ∂u(u, v), ∂
∂vf (ϕ(u, v), ψ(u, v)) = fx(ϕ(u, v), ψ(u, v))· ∂ϕ
∂v(u, v) + fy(ϕ(u, v), ψ(u, v))· ∂ψ ∂v(u, v). 例 5.10 (極座標に関する微分). 極座標 x = r cos θ, y = r sin θ (r≧ 0, 0 ≦ θ < 2π) を用いて,f (x, y) との合成関数 f (r cos θ, r sin θ) を考えると, ∂
∂rf (r cos θ, r sin θ) = fx(r cos θ, r sin θ) cos θ + fy(r cos θ, r sin θ) sin θ, ∂
∂θf (r cos θ, r sin θ) =−fx(r cos θ, r sin θ)r sin θ + fy(r cos θ, r sin θ)r cos θ.
さらに,次の重要な公式が証明できる: ∂2 ∂x2f + ∂2 ∂y2f = ∂2 ∂r2f + 1 r ∂ ∂rf + 1 r2 ∂2 ∂θ2f.
![S -module. isbi-graded, I ishomogeneousandinvariantso DH isabi-graded DH R/IR := Let I betheidealgeneratedbytheconstantfreeinvariantsofthisaction. σf ( x ,...,x ,y ,...,y ):= f ( x ,...,x ,y ,...,y ) Let R C [ x ,...,x ,y ,...,y ] onwhich S acts diagonall](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)