アクティブ状態への遷移タイミングを制御する非同期型MACプロトコルのための適応スリープ制御
9
0
0
全文
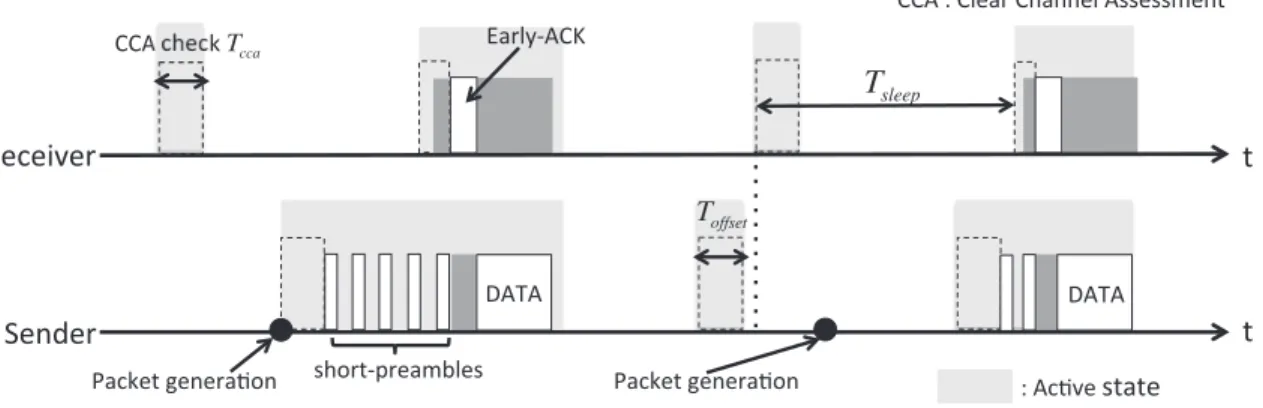
(2) 電子情報通信学会論文誌 2012/2 Vol. J95–B No. 2. ドルリスニング問題と定義しており,使用できる電力. るパケット数からトラヒックを推定する.高トラヒッ. に制限のあるセンサノードでは大きな問題となる.. ク時には遅延時間の増加及びパケット到達率の低下を. これまで,アイドルリスニングによる消費電力を削. 抑制するために,ノードのスリープ期間を短縮する.. 減するために様々な MAC プロトコルが提案されて. 一方,低トラヒック時には更にデューティサイクル削. いる [3].TDMA 型の TRAMA [4] や LMAC [5] は,. 減効果を高めるために,スリープ期間を延長する.. 送受信のタイミングが把握できるため理想的なアク ティブ/スリープスケジューリングが可能となる.し かし各ノードに通信スロットを割り当てる必要があり,. 2. アクティブ状態へ遷移するタイミングを 制御する非同期型 MAC プロトコル. 常に最新のネットワーク全体のノード数を把握する必. 本章では,送信ノードと受信ノードのアクティブ状. 要がある.同期型 MAC プロトコルの S-MAC [6] や. 態に遷移するタイミングを合わせる非同期型 MAC プ. T-MAC [7] では,局所的にアクティブ/スリープスケ. ロトコルである PS-MAC [10] と TURTLE [11] につ. ジューリングを行い,通信可能状態の同期を取る.し. いて述べる.. かし局所的な情報交換のためネットワーク全体では. PS-MAC と TURTLE は,送信ノードと宛先ノー. 複数のスケジュールが存在することとなり,異なるス. ドのアクティブ状態になるタイミングが,あたかも同. ケジュールをもつ領域間のノードは両方のスケジュー. 期型 MAC プロトコルのように同期する.どちらのプ. ルに合わせる必要がある.結果としてこれらのノー. ロトコルも,データフローの大部分が各ノードからシ. ドはアクティブ期間が長くなってしまう問題がある.. ンクノード方向であり,かつシンクノードまでマルチ. 一方,非同期型の MAC プロトコルの B-MAC [8] や. ホップ通信を行うネットワークを想定している.. X-MAC [9] は,送受信タイミングの同期を取る必要. 図 1 に PS-MAC のタイムラインを示す.PS-MAC. がなく実環境での運用を考えた場合一番現実的な手. は,送信ノードが宛先ノードのアクティブ状態に遷移. 法である.しかし,データ通信のタイミングが不明の. するタイミングに合わせるように動作する.送信ノー. ため,自ノード宛の通信要求を確認するために定期的. ドは Tcca の期間 CCA チェックを行い,チャネルが. にアクティブ状態とスリープ状態を交互に繰り返す必. フリーかつキューにパケットが存在する場合,起動要. 要がある.また,送信ノードは宛先ノードがアクティ. 求にあたる Short-Preamble を宛先ノードに対して断. ブ状態に遷移するまで長期間プリアンブルを送信し. 続的に送信する.Short-Preamble には宛先ノード ID. 続けなければならず,消費電力及び遅延が増加する.. が含まれており,これにより各ノードは自ノード宛の. マルチホップ環境下ではホップ数が増えるたびにこの. 送信要求かどうかを判断する.宛先ノードはアクティ. 問題による影響は顕著となる.この問題に対処した. ブ状態になった際に送信ノードからの Short-Preamble. 非同期型 MAC プロトコルとして,PS-MAC [10] や. を受信する.その後,起動要求に対する起動応答とし. TURTLE [11] などがある.これらのプロトコルは,. て Early-ACK を送信ノードに返す.PS-MAC では,. ノードがアクティブ状態になるタイミングを送信ノー. Early-ACK 内に宛先ノードが次にアクティブ状態にな. ドと宛先ノードで同期することで,送信時の冗長な. る時刻が記載されているので,この時刻に基づいて送. プリアンブルを削減し円滑に通信を行うことでデュー. 信ノードは次にアクティブ状態になる時刻を設定する.. ティサイクルの削減が可能である.ただし,これらの. 具体的には宛先ノードがアクティブになるタイミング. プロトコルは低トラヒック時を念頭において設計され. の少し前 (Tof f set ) にアクティブ状態に遷移するように. たものであり,高トラヒック時において遅延時間の増. する.一方 TURTLE では,送信ノードが Early-ACK. 加やキューオーバフローによるパケット到達率の低下. を受信した時刻をもとにして,次にアクティブ状態に. を招く.. なる時刻を予測し,設定する.Early-ACK の受信後,. 本論文では,PS-MAC や TURTLE などのノード. 送信ノードは宛先ノードに対してデータの送信を開始. のアクティブ状態になるタイミングを制御する非同期. する.これらの動作により,送信ノードと宛先ノード. 型 MAC プロトコルに着目する.これらのプロトコル. の 2 ノード間でアクティブ状態に遷移するタイミング. において,各ノードがトラヒックに応じて適応的にス. が同期する.. リープ期間を設定する適応スリープ制御手法を提案す. TURTLE についてもパケットの名称は異なるもの. る.この手法は,各ノードが送信待ちキューに存在す. の,同様のタイムラインとなる.また,どちらの手法. 200.
(3) 論文/アクティブ状態への遷移タイミングを制御する非同期型 MAC プロトコルのための適応スリープ制御. 図 1 PS-MAC のタイムライン Fig. 1 Timeline of PS-MAC.. においても,データの送受信が行わなければアクティ ブ状態に遷移するタイミングは同期せず,前述したプ ロトコルの動作は隣接ノード間のタイミングの同期の み行う.そのため,全てのノードのアクティブ状態に 遷移するタイミングが同期するのは,ホップ数に依存 する.. 3. 適応スリープ制御 本章では,ノードがトラヒック量を推定し,トラヒッ クに適したスリープ期間の設定を行う適応スリープ制 御 (ASC:Adaptive Sleep Control) について述べる. 提案手法では,トラヒック量としてキューに蓄積さ れているパケット数を利用する.この方法は,単純に キューに蓄積されているパケット数をモニタリングす るため,ハードウェア的制約が大きいセンサノードで も実現することが可能である. アルゴリズム 1 に,適応スリープ制御のアルゴリズ ムを示す.各ノードはスリープ期間延長用のカウンタ. Ce と短縮用のカウンタ Cs を保持する.Ce は連続し. Algorithm 1 Adaptive Sleep Control {check queue} if queue num() = 0 then Ce ← Ce + 1 Cs ← 0 else if queue num() > β then Cs ← C s + 1 else Ce ← 0 end if {reset Ce when node transmits or receives a packet} if node transmits or receives a packet then Ce ← 0 end if {chenge Tsleep } if Ce > αe then Ce ← 0 Cs ← 0 Tsleep ← 2 · Tsleep else if Cs > αs then Ce ← 0 Cs ← 0 Tsleep ← 0.5 · Tsleep end if. てキューにパケットが蓄積されていない回数を記録す るためのカウンタ,Cs は連続してキューにパケット. つ繰り上げ,短縮カウンタをリセットする.パケット. が一定数以上蓄積されている回数を記録するためのカ. がキューオーバフロー指標 β 個以上蓄積されている場. ウンタである.各ノードはスリープ状態からアクティ. 合,短縮カウンタを一つ繰り上げる.その他の場合延. ブ状態に遷移するときにキューに蓄積されたパケット. 長カウンタをリセットする.また,パケットの送受信. 数を確認する.パケットがキューに蓄積されるタイミ. が行われた場合にも,延長カウンタをリセットする.. ングは他のノードからパケットを受信したとき,若し. 延長カウンタ値が延長切換しきい値 αe 以上になると. くはノードが通信不可能なスリープ状態であっても,. カウンタをリセットし,スリープ期間を現状の 2 倍の. 自ノードでデータをセンシングした際に蓄積される.. 値に変更する.短縮カウンタ値が短縮切換しきい値 αs. キューに蓄積されたパケット数を調べることによって. 以上になるとカウンタをリセットし,スリープ期間を. 各ノードの送信トラヒックが推定可能である.パケッ. 現状の 1/2 倍の値に変更する.つまり,αe 回連続し. トが一つも蓄積されていない場合,延長カウンタを一. てパケットの送受信を行わなければスリープ期間を 2 201.
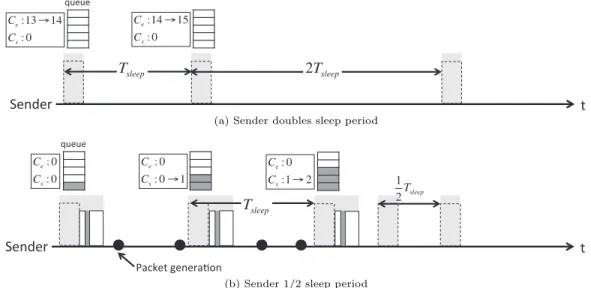
(4) 電子情報通信学会論文誌 2012/2 Vol. J95–B No. 2. (a) Sender doubles sleep period. (b) Sender 1/2 sleep period. 図 2 適応スリープ制御時のタイムライン Fig. 2 Timeline with adaptive sleep control.. 倍に延長する.また,αs 回連続して β 個以上のパケッ トがキューに蓄積されていればスリープ期間を 1/2 に 短縮する.変更されたスリープ期間は Early-ACK 及 びデータパケットに記載される.スリープ状態からア クティブ状態に遷移するときにキューの中身を調べて いるので,新たに決定したスリープ期間を即座に他の ノードに伝えることが可能になる.パケットを受信し たノードは,自ノードのスリープ期間とパケット中に 記載されているスリープ期間を比較する.高トラヒッ ク時における遅延時間に対処するために,パケットに 記載されたスリープ期間の方が短い場合,その値に変 更する. 図 2 に,αe = 15,αs = 2,β = 2 の場合におい. 図 3 16 ノードグリッドトポロジー Fig. 3 16 nodes grid topology.. て,スリープ期間を 2 倍にしたとき及びスリープ期間 を 1/2 倍にしたときのタイムラインを示す.提案する. 業社製 neoMOTE [12] に実装し,評価実験を行った.. 適応スリープ制御では,スリープ期間を 2 の乗数倍で. neoMOTE は Crossbow 社製 MICAz [13] と同等の. 操作している.これにより,一定間隔でスリープ期間. 回路構成であり,無線センサネットワーク用の OS で. をを増減させた場合は,送信ノードと宛先ノードでア. ある TinyOS [14] によって動作するセンサノードであ. クティブ遷移のタイミングがそろわない場合があるの. る.図 3 に実験に用いたトポロジーを示す.実験で. に対し,2 の乗数倍で設定することで送信ノードのア. は各ノードのパケット生起率を変化させた際のデュー. クティブ状態と,宛先ノードのアクティブ状態同期状. ティサイクル,ライフタイム,遅延時間,パケット到. 態を崩すことなくスリープ期間を制御することが可能. 達率を計測した.. となる.. デューティサイクルは,送信モード,受信モード,. 4. 実 機 実 験. アイドルモード,パワーダウンモード,スリープモー. 従来方式の PS-MAC,PS-MAC に適応スリープ制. て算出する.ライフタイムは乾電池 1 本の放電容量. 御を組み込んだ PS-MAC with ASC を住友精密工. を 1900 mAh として,乾電池 3 本使用時に無線通信. 202. ドのそれぞれの時間を内部タイマーを用いて計測し.
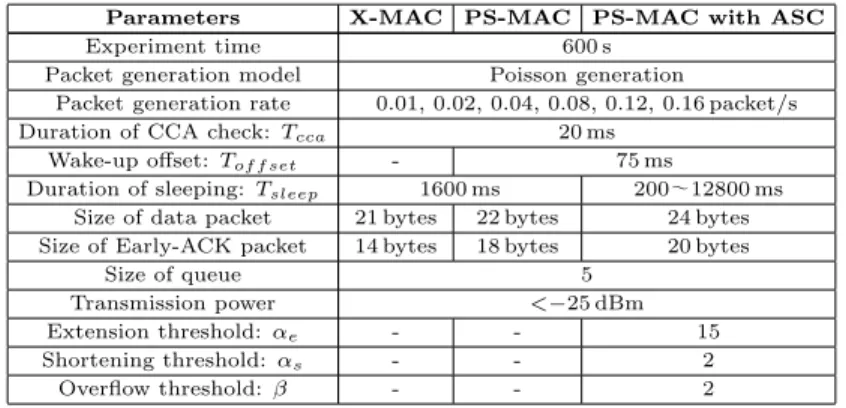
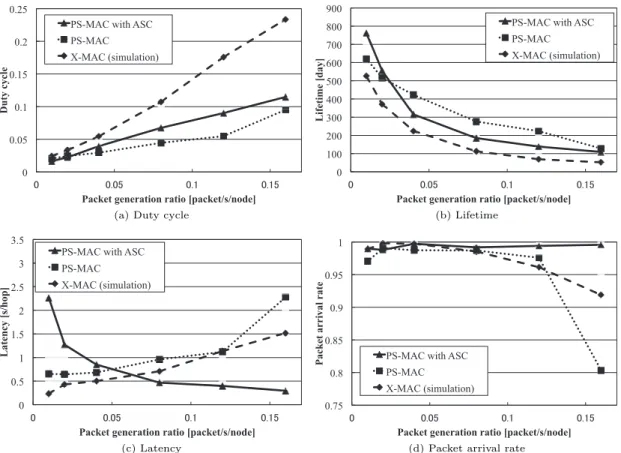
(5) 論文/アクティブ状態への遷移タイミングを制御する非同期型 MAC プロトコルのための適応スリープ制御. デバイスの消費電流のみを考慮して計算している.消. αs ,β) = (25,1,1) のとき最も遅延時間が短くなる.. 費電流は,neoMOTE に搭載されている無線通信チッ. また,αs ,β の値によらず αe = 5 の場合,遅延時間. プ CC2420 [15] の各状態における消費電力を用いる. が増加する.一方,デューティサイクルに着目した場. .遅延時間はパケットが生起してからシンクノー (表 1). 合,(25,1,1) ではデューティサイクルが大幅に劣化. ドにまで届く時間である.遅延時間の計算のために,. するが,αe = 5 の場合はデューティサイクルが低くな. 各ノードは実験開始前に FTSP [16] により時刻同期. る.このように,デューティサイクルと遅延時間はト. を行う.実験では,同期した時刻を基準として遅延時. レードオフの関係にあることから,(15,2,2) をしき. 間の計算を行う.パケット到達率は生起したパケット. い値の値として評価に用いた.. がシンクノードにまで届く割合である.その他の実験. 図 4 に実験結果を示す.参考値として X-MAC のシ. 諸元を表 2 に示す.PS-MAC with ASC の場合,ス. ミュレーション結果も示す.X-MAC に比べて,PS-. リープ期間の通知を ms オーダーで行う必要があるた. MAC はデューティサイクルの削減及びライフタイム. め,PS-MAC に比べてパケットサイズが 2 バイト大き. の向上が見られる.これは,アクティブ状態に遷移す. くなる.PS-MAC with ASC のスリープ期間の範囲. るタイミングを制御することで冗長なプリアンブル送. は,X-MAC 及び PS-MAC の Tsleep の値 (1600 ms). 信が削減されたためである.適応スリープ制御ありの. を基準として,そこから 3 回連続でスリープ期間を. PS-MAC では,パケット生起率が低い場合(低トラ. 短縮した場合を下限値 (200 ms),3 回連続でスリープ. ヒック時)に適応スリープ制御なしの PS-MAC に比. 期間を延長した場合を上限値 (12800 ms) とした.な. べて約 20%のライフタイム延長を実現している.こ. お下限値は,Tcca ,Tof f set ,バックオフ等を考慮して. れは,末端ノード(子ノードをもたないノード)では. 200 ms に設定した.なお,この実験ではパケットの再. トラヒックが低く,自ノードにおけるパケット生起に よってのみしか延長用カウンタ Ce がリセットされな. 送は行わないものとする.. αe ,αs ,β の各しきい値については,αe = 5,10,. いため,適応スリープ制御を行わない場合に比べて長. 15,αs = 1∼5,β = 1∼5 の範囲でシミュレーション. いスリープ期間を設定できたためである.一方パケッ. による予備実験を行った.遅延時間に着目すると (αe ,. ト生起率が高い場合(高トラヒック時)では,適応ス リープ制御を行った場合ライフタイムが短くなってい る.高トラヒック時での適応スリープ制御は,キュー. 表 1 CC2420 における消費電流 Table 1 Consumption current of CC2420. Mode Transmit mode (−25 dBm) Transmit mode (0 dBm) Receive mode Idle mode Power down mode Sleep mode. にパケットが蓄積されやすいため短縮用カウンタが Cs がリセットされにくくなり,結果としてスリープ期間. Consumption current 8.5 mA 17.4 mA 19.7 mA 426 μA 20 μA 1 μA. Table 2. を短く設定することになる.そのため,適応スリープ を行わない PS-MAC に比べてライフタイム特性が劣 化する. 遅延時間については,低トラヒック時には適応ス. 表2 実験諸元 Parameters used in simulations and experiments.. Parameters Experiment time Packet generation model Packet generation rate Duration of CCA check: Tcca Wake-up offset: Tof f set Duration of sleeping: Tsleep Size of data packet Size of Early-ACK packet Size of queue Transmission power Extension threshold: αe Shortening threshold: αs Overflow threshold: β. X-MAC. PS-MAC PS-MAC with ASC 600 s Poisson generation 0.01, 0.02, 0.04, 0.08, 0.12, 0.16 packet/s 20 ms 75 ms 1600 ms 200∼12800 ms 21 bytes 22 bytes 24 bytes 14 bytes 18 bytes 20 bytes 5 <−25 dBm 15 2 2. 203.
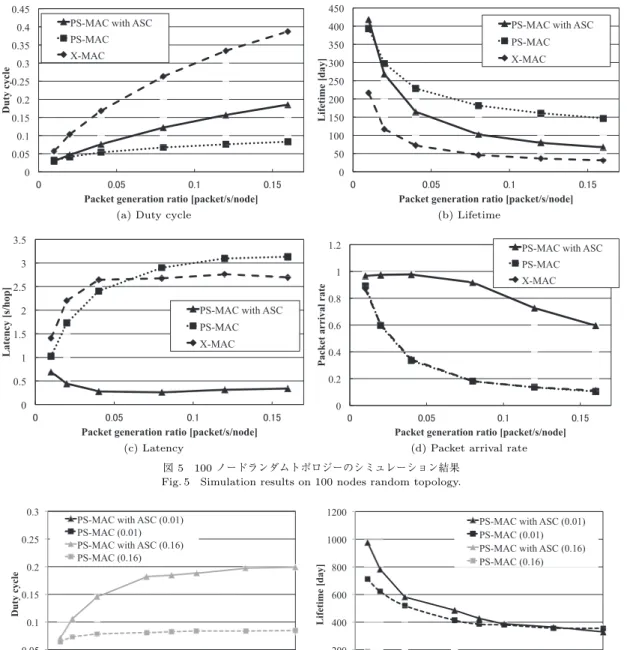
(6) 電子情報通信学会論文誌 2012/2 Vol. J95–B No. 2. (a) Duty cycle. (b) Lifetime. (c) Latency. (d) Packet arrival rate. 図 4 16 ノードグリッドトポロジーの実機実験結果 Fig. 4 Implementation results on 16 nodes grid topology.. リープ制御なしの場合の方が短く,高トラヒック時に は適応スリープ制御ありの場合の方が短い.適応ス. 5. 大規模シミュレーション実験. リープ制御ありの場合,低トラヒック時にはスリープ. 実機実験では大規模なネットワークでの実験は困難. 期間が長く設定されるため,必然的にパケット送信ま. なため,シミュレーションによる大規模実験を行った.. で長い時間待たされることになるため遅延時間は長く. シミュレーションでは,実機実験のときと同じノード. なる.高トラヒック時には,スリープ期間が短く設定. 密度となるようにシンクノードを含めた 100 台のノー. されるので遅延時間は短くなる.一方適応スリープ制. ドを 550 cm × 550 cm のフィールドに配置する.シン. 御なしの場合,高トラヒック時にはキューにパケット. クノードはフィールドの角に配置し,その他のノード. が存在する時間が長くなるため,遅延時間が増加する.. 配置はフィールド内でランダムとする.ルーチングは. パケット到達率は,高トラヒック時でも適応スリー. 静的に行うものとし,各ノードの中継ノードは通信範. プ制御ありの場合は高い到達率を維持しているのに対. 囲内のノードで自ノードよりシンクノードからのホッ. して,X-MAC 及び適応スリープ制御なしの場合はパ. プ数が少ないノードからランダムに選ばれたノードと. ケット到達率が低下する.適応スリープ制御ありの場. する.その他のシミュレーション諸元は,実機実験で. 合は,遅延時間が短いためにキューに入れられたパケッ. 用いた表 2 と同様である.. トがスムーズに送信される.適応スリープ制御なしの. 図 5 (a)∼(d) にシミュレーション結果を示す.デュー. 場合は,前述のとおり遅延時間が長くなり,結果とし. ティサイクルとライフタイムは,適応スリープ制御あ. てキューオーバフローを招くため到達率が劣化する.. りの場合,適応スリープ制御なしの場合に比べて劣化 している.ノード数が 100 と多いため,パケット到. 204.
(7) 論文/アクティブ状態への遷移タイミングを制御する非同期型 MAC プロトコルのための適応スリープ制御. (a) Duty cycle. (b) Lifetime. (c) Latency. (d) Packet arrival rate. 図 5 100 ノードランダムトポロジーのシミュレーション結果 Fig. 5 Simulation results on 100 nodes random topology.. (a) Duty cycle. (b) Lifetime. 図 6 ノード数に対するデューティサイクル及びライフタイム特性 Fig. 6 Duty cycle and lifetime performance as a function of the number of nodes.. 達率が同じであっても 16 ノードの実機実験のときよ. 場合の遅延時間が他のプロトコルに比べて非常に短く. り単純にトラヒックが増加している.そのため適応ス. なっている.これは実機実験の結果でも述べたように,. リープ制御ありの場合,スリープ期間が短く設定され. 適応スリープ制御によりトラヒックに適したスリープ. たためにデューティサイクル及びライフタイムが劣化. 期間を設定するため,パケットがキューに存在する時. した.遅延時間については,適応スリープ制御ありの. 間がほとんどなく,スムーズに送信が行えるためであ 205.
(8) 電子情報通信学会論文誌 2012/2 Vol. J95–B No. 2. る.パケット到達率については,適応スリープ制御あ. 低トラヒック時には擬似同期 MAC プロトコルの利点. りの場合にも高トラヒック時に到達率の劣化が見られ. であるデューティサイクル削減効果を更に高めるため. る.これはノード数が多いためネットワーク中のトラ. に,スリープ期間を長く設定する.. ヒックが増加し,適応スリープ制御によってスリープ. 適応スリープ制御の有効性を確認するため,PS-. 期間が下限値の 200 ms に設定してもトラヒックに対. MAC にスリープ制御を組み込み,実機実験及び大規. 応しきれなくなり,キューオーバフローが発生したた. 模実験を行った.その結果,従来の PS-MAC に比べ. めである.. て,高トラヒック時には短い遅延時間で高いパケット. 図 6 (a),(b) にパケット生起率を 0.01,0.16 とし, ノード数を変化させたときのデューティサイクル及び ライフタイムを示す.パケット生起率が 0.01 のとき, ノード数が減少することにより適応スリープありの. 到達率を維持でき,低トラヒック時にはデューティサ イクル及びライフタイムが向上することを確認した. 謝辞 本研究の一部は,国立大学法人豊橋技術科学 大学グローバル COE プログラム “インテリジェント. PS-MAC のデューティサイクル及びライフタイムが,. センシングのフロンティア”,日本学術振興会科学研. 適応スリープなしの PS-MAC に比べて改善されてい. 究費補助金,基盤研究(C)21560397 の援助により行. ることが分かる.これは,パケット生起率が低くノー. われた.関係者各位に深謝する. 文. ド数が少ない環境では,ネットワーク全体のトラヒッ クも少なくなるため,適応スリープの効果により各. [1]. tectures and protocols, pp.1–12, Auerbach Publica-. ノードのスリープ期間が長く設定されるためである. このシミュレーション実験では実機実験と同じく. (αe ,αs ,β) = (15,2,2) をしきい値として用いた.. 献. E.H. Callaway, Wireless sensor networks—Architions, 2004.. [2]. L. Feeney and M. Nilsson, “Investigating the energy consumption of a wireless network interface in an. ノード数が 100 と多くネットワーク全体のトラヒック. ad hoc networking environment,” Proc. 20th Annual. も増加するが,適応スリープを行うことで,遅延時間. Joint Conference of the IEEE INFOCOM 2001, vol.3,. はの劣化はほとんどないと考えられる.一方,デュー. pp.1548–1557, Alaska, USA, April 2001. [3]. ティサイクルに着目した場合,トラヒックの増加によ. tocols for wireless sensor networks: A survey,” IEEE Commun. Mag., vol.44, no.4, pp.115–121, April 2006.. りスリープ期間が短くなるノードが多くなるため劣化 すると考えられる.. I. Demirkol, C. Ersoy, and F. Alag´ oz, “MAC pro-. [4]. V. Rajendran, K. Obraczka, and J.J. Carcia-LunaAceves, “Energy-efficient, collision-free medium ac-. 前章の実機実験の結果及び本章のシミュレーション. cess control for wireless sensor networks,” Proc. ACM. 結果から,適応スリープ制御についてまとめると,次. Conference on Embedded Network Sensor System. のとおりである.. (SenSys’03), pp.181–192, Los Angels, USA, Nov.. •. 高トラヒックの場合,遅延時間とパケット到達. 2003. [5]. L.F.W.. van. Hoesel. and. P.J.M.. Havinga,. “A. 率の大幅な改善が可能である.一方でスリープ期間が. lightweight medium access protocol for wireless sen-. 短く設定されるためデューティサイクル及びライフタ. sor networks,” Proc. First International Workshop on. イムは劣化する.. Networked Sensing System (INSS 2004), pp.205–208,. •. 低トラヒックの場合,適応スリープによりス. Tokyo, Japan, Aug. 2004. [6]. W. Ye, J. Heidemann, and D. Estrin, “An energy-. リープ期間を長く設定することで更なるデューティサ. efficient MAC protocol for wireless sensor networks,”. イクルの削減及びライフタイムの延長が実現可能であ. Proc. 21st Annual Joint Conference of the IEEE IN-. る.しかし,遅延時間は劣化するため遅延時間の制約. FOCOM 2002, pp.1567–1576, New York, USA, June. が緩いアプリケーションで有効である.. 2002. [7]. efficient MAC protocol for wireless sensor networks,”. 6. む す び. Proc. ACM Conference on Embedded Network Sensor System (SenSys’03), pp.171–180. Los Angels, USA,. 本論文では,アクティブ状態に遷移するタイミング を制御する非同期型 MAC プロトコルにおける適応ス. T.V. Dam and K. Langendoen, “An adaptive energy-. Nov. 2003. [8]. J. Polastre, J. Hill, and D. Culler, “Versatile low. リープ制御手法を提案した.この手法は,高トラヒッ. power media access for wireless sensor networks,”. ク時には遅延時間の削減及びパケット到達率劣化を抑. Proc. 2nd ACM Conference on Embedded Network. 制するためにスリープ期間を短くする設定する.一方, 206. Sensor System (SenSys’04), pp.95–107, Baltimore,.
(9) 論文/アクティブ状態への遷移タイミングを制御する非同期型 MAC プロトコルのための適応スリープ制御. 冨田. Maryland, Nov. 2004. [9]. M. Buettner, G.V. Yee, E. Anderson, and R. Han, “X-MAC: A short preamble MAC protocol for dutycycled wireless sensor networks,” Proc. 4th ACM Conference on Embedded Network Sensor System. 真宏. (学生員). 平 22 豊橋技科大・工・情報卒.現在,同 大学院博士前期課程在学中.無線センサ ネットワークに関する研究に従事.. (SenSys’06), pp.307–320, Colorado, USA, Nov. 2006. [10]. 橋本典征,上原秀幸,大平. [11]. トワークにおける擬似同期 MAC プロトコルの特性評価, ” 信学技報,USN2009-14, July 2009. 久保祐樹,柳原健太郎,野崎正典,福永 茂,中井敏久,. 孝,“非同期型無線センサネッ. “データ収集型無線センサネットワークに適した低遅延省. [12]. 電力マルチホップ通信, ” 信学論(B),vol.J92-B, no.8, pp.1225–1235, Aug. 2009. 住友精密工業,“Wireless Module: neoMOTE,” http://www.neomote.com/. [13]. Crossbow Technology, Inc., “Wireless Module: MI-. [14]. TinyOS Home Page, http://www.tinyos.net/. [15]. Texas Instruments, Inc., “2.4 GHz IEEE 802.15.4 /. CAz,” http://www.xbow.com/. ZigBee-ready RF Transceiver: CC2420,” http://www.ti.com/ [16]. 上原. 秀幸. (正員:シニア会員). 平 4 慶大・理工・電気卒.平 9 同大大 学院博士課程了.同年豊橋技科大・情報・ 助手.平 14 同講師.平 16 同助教授.平 18 同大・未来ビークルリサーチセンター・ 助教授,平 19 同准教授,現在,同大学院 電気・電子情報工学系准教授.平 14∼15 ATR 適応コミュニケーション研究所客員研究員.主として無 線アクセス方式,マルチホップ通信の研究に従事.情報処理学 会,IEEE,ACM 各会員.平 14,平 18,平 23 本会通信ソサ. イエティ活動功労賞.. ´ L´ M. Mar´ oti, B. Kusy, G. Simon, and A. edeczi, “The flooding time synchronization protocol,” Proc. 2nd ACM Conference on Embedded Network Sensor System (SenSys’04), pp.39–49, Baltimore, Maryland, Nov. 2004.. (平成 23 年 5 月 26 日受付,9 月 20 日再受付). 大平. 孝. (正員:シニア会員). 昭 53 阪大・工・通信卒.昭 58 阪大大学院 博士課程了.NTT にて衛星搭載 GaAsMMIC の設計を担当.ATR にてエスパアン テナの研究に従事.平 17 ATR 波動工学研 究所長.現在,豊橋技術科学大学教授.昭 61 本会篠原賞.平 10 APMC Japan Microwave Prize.平 16 本会エレクトロニクス賞.電気学会ミ. リ波調査専門委員長.URSI Commnication C Chair.IEEE. 高. 博昭 (学生員). 平 19 豊橋技科大・工・情報卒,平 21 同 大大学院修士課程了.現在同大学院博士後. MTT-S Kansai Chapter Founder.IEEE MTT-S Nagoya Chapter Founder.工博.IEEE Fellow.. 期課程・電子情報工学専攻在学中.センサ ネットワークに関する研究に従事.. 橋本. 典征 (正員). 平 20 豊橋技科大・工・情報卒,平 22 同 大大学院修士課程了.在学中はセンサネッ トワークに関する研究に従事.. 207.
(10)
図
+2
関連したドキュメント
金沢大学大学院 自然科学研 究科 Graduate School of Natural Science and Technology, Kanazawa University, Kakuma, Kanazawa 920-1192, Japan 金沢大学理学部地球学科 Department
東京大学 大学院情報理工学系研究科 数理情報学専攻. [email protected]
情報理工学研究科 情報・通信工学専攻. 2012/7/12
ポートフォリオ最適化問題の改良代理制約法による対話型解法 仲川 勇二 関西大学 * 伊佐田 百合子 関西学院大学 井垣 伸子
関東総合通信局 東京電機大学 工学部電気電子工学科 電気通信システム 昭和62年3月以降
物質工学課程 ⚕名 電気電子応用工学課程 ⚓名 情報工学課程 ⚕名 知能・機械工学課程
