τ 加 ∫ψα 麗 se
J
ρ ”rnal げ Psッ‘加nomic sσ廟 ce 1982,
Vo1.
1,
No.
2,91−
100長 走 行 時 間分 化
強
化
と
付
随
行 動
山
本
豊
東 京 大 学
Co1
正ateralBehavior
underthe
Di
{ferential
Reinforcement
ofLong
Running
−
time
Schedule
Yutaka
YAMAMoTo
University
げ TokyoThree experiments explored the collateral
behaviors
of rats under thedifferentia
正 reinforce 皿 ent of long running−
time schedule (DRLR )in a 6−
segmented straight alley.
In Experiment l and 2, three groups were used
.
DRLR was applied to parts of the alley , i.
e.
first 4 (
Anterior
),
middle 4 (Middle ),
or last 4 (Posterior)segments of the alley for therespective groups
、
Anterior
groupdeveloped
thehighest
degree
of collateralbehaviors,
followed
by
tllose ofPosterior
group,
while the collateralbehaviors
olt’
the
Middle
groupprogressivety decreased with training
.
In Experiment 3,
three groups o [ rats were givencontinuously reinforced trials(
0,
200r 80 trials)fol】Qwedby
DRLR training.
Result showed that the region a王ong the alley where collateralbehaviors
were seen was related to the amount of continuously reinforced trials received.
Taken
together,
findings
of this study are incoInpatible with the“
adventitious reinforcement”
or“
interimbehavior”
interpreta.
tion,
and suggest that rats did not learned a collateralbehavior
per sebut
rather a response chain as a whole.
Key words :differential reinforcement of long running
−
tirne schedule,
straight alley,
collateral
behavior,
rat,
近 年の動 物に よ る時 間 評 価の研 究の興 隆に伴 なっ て,
時 間 分 化 強 化 手 続 きに よる動 物 行 動の変 容の研 究 も盛ん に なっ て きた (Richelle & Lejeune,
1980).
これ らの 研 究の大 部 分は フ リー
ナペ ラ ン ト事 態にお い て ラッ ト の レバー
押し,
ハ トのキー
つ つ ぎ等の反 応 を 用い,
反 応 間 間 隔 (IRT )等を計測して実験者の設定し た基 準に従い分 化 強化をするもの で あ る.
低頻度 分化強化ス ケジュー
ル (DRL
) 等の長 時 間 方 向へ の 分 化 強 化 手 続 きで は,
IRT
の最 中に, collateralbehavior
(Wilson
&Keller
1953,
以下 「付 随行動」と呼ぶ)と呼ぽ れるス テレオ タ イ プ的な行 動 がしばしば観察さ れ る,
付随行 動が形 成さ れる機 序は どの ような ものなの か, また 動 物が 「時 間 ど り」(timing )をする にあたっ て必 須 な 媒 介 行 動 なの か,
単な る 副産物的 行動なの か とい う 問題につ き, 多くの 議 論がなさ れ てい る (Laties
et al.
,1965
;Laties
et al.
,
1969
;Kramer
&Rilling
,1970
;RichelIe
&Lejeune,
1980
),
これとは別に ,Skinner
(1948
)は,スキナー
箱に入れた ハ ト に20秒お きに反 応とは 無 関 係 な給 餌を行 な うと , 定 型 化した 行 動パ ター
ン がそ れ ぞ れのハ
ト に出 現 するのを 観 察し,
「迷信 行 軌 と呼ん だ.
Skinner
は これ らの 行 動 は「偶発強 イ匕」
(adventitious
reinforcement )
Pこよ り 形成さ れ る と考え たが
,Staddon
&Simmelhag
(1971
) は, 給 餌 間 隔 内での 様々 の 行 動の時 間 経 過に伴 な う推 移 を調べ て,ハ
トの行 動レパー
ト リー
内の特 定の反 応 群が, 周 期 的給餌の経 験をへ るにつ れ,
強 化まで の時 間が隔た っ て い るがゆえにス テ レオ タ イ プ的に 出現 する とい う事 実を明 らか に し た,
これ らの行 動は 「中間 行 動 」* (inter
・
ium
behavior
)と呼ばれる.
これに対し て,
強化直前に 生 起 頻 度が増加 する,
報 酬に対 する完了行動に類似し た 反 応群が別に存在し, これ ら は 「終結 行動」(terminal behavior)と呼ばれる.
Skinner が迷 信 行 動 と呼んだ も の の大 部 分は こ の中 間 行 動で あ る と考 えられ,
偶発 強 * 中 間 行 動と は,
強 化の後,
終 結 行 動が生 起 する ま で の 問に生ずる行動 とい っ た意味であり, 強化と強化の問 の真ん中の時点で生ずる行 動とい う意 味で は ない,
92 基 礎 心 理 学 研 究 第 1巻 第 2号 化に よ り形 成 されたものでは ない こ とが 示 唆さ れ た
.
Staddon
は こ の後,
強 化と反 応の変 動 性の関 係に つ い て の理 論を展 開し て い るが (Staddon,
1976),
そ れに ょ ると, 周 期 的に強 化 刺 激が呈 示 される状 況で は,
次の強 化 刺 激に時 間 的に近い時 点 も,
遠い時 点 も反 応の変 動 性 は小さ く,
中 間時点で変 動 性 が 大 き くな る と し てい る.
そし て強 化 刺 激に遠い時 点で で る中 間行動は , 強 化 刺 激 に対す る完了行動に拮 抗す る 別の完了行動に類 似し た も の になると され た,
DRL
等に み ら れ る付 随 行 動と,Staddon
の中 間 行 動の 概 念に は多 くの共通 性 があり, 何らかの関係 が推測 さ れ る,
付 随 行 動は 「時 間かせ ぎ」の為の行 動の如 き効 果 を もち, 強 化に 遠 く先立つ 時点で も出現し うる.
ま た こ の 反応が偶 発強化に よ り形 成されてい くとする説 明 も可 能 である.
形成の過程, その機 能につ い て,
2
者 間の 比較 検 討 が 必 要 と なる.
本 研究 で 用い るス ケ ジュー
ル は,
ラ ヅ トの直 線 走 路 走 行 反 応に適 用されるもので,
長 走 行 時 間分 化 強 化 (Dif−
ferential
Reinforcement of Long Running−
time ;以下
DRLR
と略記する.
)手続 きと呼ぶ こと にする.
手続 ぎの考案者Logan
(1960
)に よ りい くつかの基 礎 的 デー
タ の報 告がなさ れた.
ラ ッ トを 用い , 餌を 報 酬 と して直 線走路を走ら せ る際, 計 測された走 路 全 体 の 走 行 時 間 が,
予め実 験者に よ り設 定さ れ た基 準 時 間 (この時 間は 連 続 強 化 あるいは部分強化の際に期待さ れ る走 行時 間よ り相当大きい.
) よ り長か っ た場 合に の み,
走 路 終 端の ラ ッ トが走りつ い た地 点に餌を落 す.
訓 練 が進 むに 従 い , ラ ッ トの走行時間は基 準 時 間 近 辺に最頻値 を 持つ 単 峰 性の分布を 示すよ う に な ることが 知られている.
直線 走路 事 態は,一
定距 離の 直 線上に連 続 継起す る 反応連 鎖 を最終 地 点で強化するこ とに よ り系 列 化 する事態と み な せ るが,DRLR
訓 練 下の ラ ヅ トが 形 成 する反 応 系 列の様 相は, 連 続 強 化 あ るいは部 分 強 化で の“
連 続 的な走 行 反 応 系 列” とは当 然 異 なっ てくる.
Rashotte ら(Rashotte&
Amsel ,1967,1968
;Amsel
&Rashotte,1969
)に よ り,
DRLR に お い て も, ラ ヅ ト は 走 行中に 付 随 行 動 と呼 ぴ うるス テ レオタイプ的 な 「時 間 ど り行 動 」 を示す こ とが報告さ れ, 個別儀式 行 動 (idiosyncratic
rituals) と名 付 け られた.
既に述べた フ リー
オペ ラ ン ト の DRL 等の研 究で は,IRT
の間, ラ ッ トの 行動の変化は数 値的 に把 握 することは で きない.
これに対し走 路の DRLR で はフ ォ トセ ンサー
を多 数用い ること に よ り走 路を細分 化し て各々の区 画の走行時 間を計 測し う るので, 引 き延 ば さ れ た走 行 時 間 内の ラ ヅ ト の付 随 行 動に 関す る情報 を.
区 画 走 行 時 間 系 列と し て数 値 的に捉え る こ とが 可能 と なる.
本 報告で は, 6区 画直線走路を用い て滞 留区 画 (その ラヅ トが他の区画に比べ て大 き な 走 行 時 間 を 示 す 区 画 を 指し, 従っ て付 随 行 動が多 発し て い る区 画 と考え ら れ る.
)の分 析を可 能に し,
走 路 上の付 随行動と強化との 関 係を明 らかに しよ う とする.
実 験の出 発 点と して,
本 来 時間 的に 設定さ れ た状況で提出された中間 行 動の概 念 を 走 路の空 間布 置に拡 大適用し, 走 路で の付 随 行 動が,
中 間行動の諸特 徴を備えて い る か否か を検 討して い く.
偶 発 強 化 と走 路の付 随 行 動の関 係につ いても検 討 が 加え ら れる.
実 験 1Logan (
1960
),Rashotte
&Amse1
(1967,1968
)によ る と
,
DRLR で み ら れ る付 随 行 動は,
出発箱の ドアを か む,
途 中で逆戻り し再度方 向転換し て目標箱ま で一
気 に走る,
目標 箱の ドア の直前で うずくま る, 等々で, そ の反 応の トポ グラ フ ィー
や 生 起 す る 位 置は様々 の よ うで ある,
実 験1
で は,
報 酬を得る走路の最 終地点と付随 行 動の 生 ずる地 点 との距 離 関 係につ い て調べ てみ る.
走路 で の付 随 行 動は報 酬地点に近付く走行 反 応 と拮 抗す る 反 応群で あ り,Staddon
の 中 間 行 動の 概念を走 路の空 間 上に適用する な ら ば,
それは報 酬 地 点か ら遠い出 発 箱よ りの 部位で最 も生じやすい はずである.
3群を設け, 6 区 画 走 路の出発箱に近い4
区 画, 両端の区画 を ぬいた4
区 画, 日標 箱 側の4
区 画の走行 時 間で 各々 DRLR 訓 練 を行 ない, 各 群に設 定し た強 化 基 準に よ り付 随 行 動の生 ずる 地点をどの程 度に規 定し う る か を検 討 する.
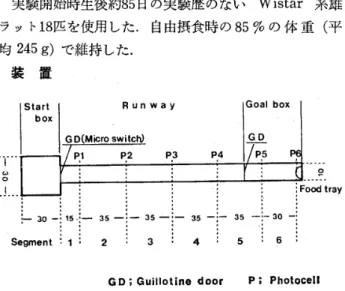
方 法 被 験 体 実験 開始時 生 後 約85日の実 験 歴のないWistar
系 雄 ラ ッ ト18匹 を使用した.
自 由摂 食 時の 85 %の 体 重 (平 均2459
)で維持し た.
装 置い
OStart Runway Gool box
boxGDM にro 5w随ch慶 GD PI
層
P2層
P3,
P4P5」
1唱
’
.
引
l l、
:iF
l l … 1−
30甲
: :,
:.
: …15.
L35
_
…_
,5_
i
_
35−
…一
、, : : : 」_
3D 」.
egment噛
゜
冒
1’
11 唱
幽
1i 2i
3i
4 : 5・
1卜
:」
6・
’
”
巨 3FoOd trayGO 斈Guilloti飢e door P;Pho吐06el匚
山 本 :長 走 行 時 間 分 化 強 化と付 随 行 動 93 全 長215cm の木製廊 下式直 線走路(Fig
・
1
)を使 用し た.
30cm ×30 cm の出発 箱,
140cm ×10 cm の走 路 本 体,45cm
×10
cm の 目標 箱か ら構 成 され, 各 部 分はギ ロ チ ン ドアで 区 切ら れる,
側 壁の高さは約45cm
で天 井 は開 放さ れ て お り, 内面は 目標 箱が黒 色,
その他はすべ て灰 色に塗 装 されてい る.
走 行 時 間 計 測 用に 6個の赤 外 線フ ォ トセ γ サー
(出発 箱に近い方か ら 順番にPl か ら P6 まで番 号 をつ けて呼ぶ) を 用いた,
出発 箱 ドア よりP1
ま での距離は,15
cm ,P
5
よ り最終端餌皿上を透 過 する P6 まで の距 離は 30 cn1 , その 他の隣接 す るフ ォ ト セ ン サー
間の距 離は 35cm である,
出 発 箱 ドア には引 き 上 げ 検 知 用の マ イ ク卩 ス イ ッ チを装 着した.
目標 箱終 端 の壁の裏 側に はペ レッ トフ ィー
ダー
があり,
内 部に突 出 し た金 属性漏 斗を と お し て, 作動音と共にペ レ ヅ トを 餌 皿 に落す.
走行 時間の計測,報酬の有 無の決 定は,
10ms の時 間精 度で マ イクロ コ ン ピュー
タによ り自動 的に なさ れ た.
手続き 予 備 訓練;15
日間で, 給 餌 時 刻,
給 餌 量の操 作に よ り ハ ンガー
リ ズ ムを 形 成し, これに併 行し て予 備 訓 練 を 行 なっ た.
最 初の7
日間で は1
日5
分のハ
ン ドリン グを 行 なっ た.
続 く4 日間で はギロ チ ン ドア を開 放し た装 置 内 に2
匹 ずつ 5分 間 放 置 し, その後3
目間は 1匹ずつ 5 分 間 放置し て馴致 訓 練 を行なっ た.
こ の馴 致 訓練の最終口 に は走 路 馴 致とは 別に,
目標 箱の餌皿 にペ レッ ト(45 mg ) を5個おぎ, 直 接ラッ トを入 れて閉 じ込め摂 食 するまで 放 置し た.
予 備 訓練最 終日に は,
ギロ チ ン ドア の上 げ 下 げに馴れ さ せ る ために,
報 酬がでない以外は本 訓練と ま っ た く同じ手順で各個 体2試 行 走 行 させ,
走 行時間もベー
ス ラ イン デー
タ と し て計 測した,
本 訓練 :すべ て の ラヅ トに
,
第1
,2
日 目 は各2
試 行,
3,
4 目 目は各4
試行,5
日 目は8
試 行,6
日 目は10
試行 の計 30試行, ペ レ ッ ト3個を試 行実施前に 予め餌皿 に置 い て,
連 続 強 化に よ り走行訓 練を し た,
7目 目以 降は 18匹の ラ ッ トを 6日 目10
試 行の走 行 時 間 に よりカウン ター
一
・
9ラン ス して,Anterior
(A)群,
Mid−
lle
(M
)群,Posterior
(P )群の 3群に6
匹 ずつ わけ,1
日10
試 行で26日間のDRLR
訓練を行なっ た.
A
群では 出発箱 ドァ を上 げてか らラ ッ トが P4 を切る ま で,M
群 で は P1 か らP5
まで,
P群で は P2 か らP6
ま での前 進に要し た時 間が4 秒を越えて い た場 合に の み,
直ちに フ ィー
ダー
を1
秒 間 隔で 3回 動かし, ペ レ ッ ト3 粒を餌 皿に落し た.
従っ て,
A,
M 群で は ラ ッ トの餌皿地 点 到 達を待たず,
そ れ ぞ れP4,
P5 点到達時に,P
群で は餌 皿の地点に到達し た時に,
フ ィー
ダー
の作動が開始され る.
試行間 間 隔は20
秒と し,1
個体に連続し て10
試 行を行 な う.
金網の小型ケー
ジ を走 路のそばに おぎ, 試 行 間は ラ ッ トをこ こ で待機させ た.
試 行 手 順 とし て は , 実 験 者は まずラ ヅ トを出発 箱に 入 れ,
5秒 後に出 発 箱 ドアを 上 げる.
こ の際出発 箱上方に と りつけた ミラー
で ラ ッ ト の頭 部の方 向を確 認し,
ドア の方を向い ていない場 合は向 くまで ドアを 上 げるの を待 っ た.
ラ ッ トが 目標 箱にはい っ たら 目標 箱 ドアを 下 げ,
報 酬 試 行の場 合はペ レ ヅ トを 摂 食し終る まで,
無 報 酬 試 行の場 合はP6
を 切っ て後10秒 間 閉 じこ め,
待 機ケー
ジ に昃 し た.
結 果 3 群の報 酬 獲得率の 変 化 を Fig 2に示 す.
DRLR 開 始時の 3群 間の報 酬 獲 得 率を揃 える た め に,
区画1
と 区 画 6の長 さ を 他 区 画より縮め た走 路を使用し て お り,3
群 間の差は初 期の試 行で は認め ら れて いない.
しかし訓 練に伴い報 酬 獲 得 率の高い方か らP群,A
群,
M
群の順 で差異が確定し た.
最終ブロ ッ ク40
試 行での3
群の報酬
獲 得 率に は Kruskal−Wallis
検 定に よ り有 意 差 (Z2=
13.
5,
df=
2,
Pく.
05
)が認め ら れ た.
Ryan
法に よ り名 義 水 準を求め て多 重 比較 を すると,
P 群とA 群 (U
=0
, nin2=
6,
P・
〈.
D5),
A
群とM
群 (U
= 4・
5,
nln2 = 6,
Pく.
05) の いずれの対に も有意 差が認め られた.
% 0 6 契憎
」
ド
0 4 「 O 唱」
鳳
3 り = 02甲
Oの
り
匚 OO】
O匹
oA 123455789101 で 1213 3LOCKS OF 20 マ 臼IALSFig
.
2 Percent of rewarded trials for GroupsA
,
M,
andP
in Exp.
1.
各群 内でDRLR
訓練最初の20
試行と最 終20
試 行での 報 酬獲得 率をサ イン ラン ク検定で 比較する と,P
群では 成 績が向上 し てい る とい う仮説が支持さ れ (T 二 〇,
P<・
05),
M 群では下降し てい る とい う仮説が支 持さ れ た (T
=O,
P〈.
05)が,
A 群で は 変 化が生じた とは 言 え な い.
Fig.3
には最 終40試 行で の全 試 行 及び報 酬 試 行で の反 応プ P フ ィ ル (走行所要時 間を 各 区 画 毎に順 次プP ッ ト94
基 礎 心 理 学 研 究 第1
巻 第2
号 6 5 0一
〇、
ド
} ご σ Q一
4 β 2 」 場 Σ 厂 賜 ≡ 盈 Z コ匡
At.
L TRdALSム
厂
\ る ヨ.
ψ
゜丶
REWARDEDTRIALS A
:
ゆ
123456SEG.
123456Fig.3 Response
profilesin
Exp.
II.
Running time of each segment
for
Groups
A,
M ,
and P
in
last
40 DRLR trials.
した もの)を各 群 毎の 平 均 値で示 す
,A
群では P4 ,M
群で はP5
を切っ て も,
そ れ ぞ れに該 当する区 間の走 行 時 間が4 秒以 下で フ ィー
ダー
作 動 音がない場 合,
ラ ッ ト が目標 箱に は い らず,
試行が終了しない ことが,DRLR
訓 練後 期では頻発し たが,
こ の場 合に は60秒 待っ て ラ ヅ トを走路か ら取 り出し,
以 降の区 画の走 行 時 間に は60秒 を あて るこ と とし た.
Fig・
3でプ ロ ッ ト不 可能 な大 きな 値が みら れるのはこ の ため である.
A 群では区 画1
が 滞 留 区 画 となり,
観 察さ れ た付随 行動は ,一
担 走 路上に出 てか ら戻っ た か, 出ないかの別はあるが,
ほ と ん ど出発 箱 内で の移動 (locomotion
)であっ た.
M 群で はス テ レ オ タ イプ的 な 行 動が観 察さ れ るラ ヅ ト は いなか っ た が, 反 応プロ フ ィルか ら, 報 酬試行で は目標 箱直 前で止 まっ てい たか,
後退 してい た と推 測される.
P群では 目標箱 直前での 待ち, 立ち 上 り, 目標 箱ドア付 近を か む行 動, 目標箱にはい っ た後餌皿に近よらない まま しばら く動ぎ ま わる行 動 な どが観 察された.
考 察 走 路 中 央4区 画の走 行 時 間で分 化強化し たM
群は, 3 群 中もっ とも成 績が低いぼか りか,
訓 練に伴っ て成 績が 下降し て い っ た,
走 路 とい う空 間 的布置では走行反応系 列の始 点 と終 点は必 ず 速 度ゼ ロ と な る か ら ,A
群,P
群の 方が相 対 的に成 績が上に なるのはある程 度予測しえた こ と だ が,
M
群に おい ても当初は他の群と 同程 度 (30 %程) 生 起して いた強 化 を もた らす 反 応 系 列が,
安 定し た付 随 行 動 を 産み出しえず,
逆に成 績が低 下し てい く事 実は, 偶 発 強 化に よ り付 随行動が形 成 される とする説に不利な 結 果 とい え る.
た ま たま生 じた後退,
立ち上 り等の 反応 が,Skinner
が 迷信 行動 を 説 明 し たの と同 じ よ うに直 接 に強 化さ れ てい る な らば, こ の反 応の 生 起 頻 度は上昇 す る はずであり,
偶発 強化の機序のみ で は成 績の低 下は説 明 で き ない.
当 初の予 測 とは反 対に
,
強 化刺激に近い部 位で分化強 化 を うけたP
群の方が,
遠い部分で分 化 強 化を う け た A群よ り成績が よか っ た.
中間行動は動 機づけ ら れた 行 動が抑 制 された コ ン フ リク ト状況で生 ずる転 移活動 (displacement activity )との 共通 性が指 摘さ れてお り (Staddon,
1976;McFarIand、1966
),
抑 制が 必要とされ る状 況で生じ やすい と されて い る.
DRLR は ラッ トに直 接抑 制 を 求め て い る状 況 と考え ら れ る か ら,
申間行 動は 生じ やすいはずである.
完了行 動 と拮 抗 する ような 反 応 が強 化 刺 激に遠い時 点で生ずる とい うStaddon
の説に よれ ば,A
群の方がP群よ りも容 易に 中 間 行動に由 来 す る付 随行動を形 成し ていいはずである。
実験1
で の結 果 は否定的であるので, こ の点につ い て以下に検討し てい こ う.
P群は P6 を 切っ た時点で フ ィー
ダー
音とペ レ ッ トを同時に得る.
これに対しA群は P4 と切っ た時 点で フ ィー
ダー
音を得る.
フ ィー
ダー
音は強力な二 次強 化子 となっ ている と考 え ら れ,
結 果の フ ィー
ドバ ッ クはこ の 時 点で与えられてし まうので,A
群に対して は P4 の位 置に餌1
凰 を 設置し ても同 じ 結 果 がで る か もしれ ない.
実 験 1の実 験 計 画で はDRLR
をか け る走路 部 位 を 変 化 さ せたばか り で なく,
強 化 刺 激が与え られる地 点も実 質 的 に は群 間で変 化させ てし まっ た 可能性がある,
こ の点に つ い て の吟味が まず 必 要であろ う.
実 験 II実験
1
の考 察で述べ た,
強 化刺激 ある いは二次強 化 刺 激の 呈 示位 置 と付 随 行 動の反 応 系列 内 位 置の閧 係につ い て検討を続 ける.
実験ll
では, 走路 出発 箱に近い4
区 画 でDRLR を 行な う が P6 を切る時 点ま でフ ィー
ダ冖
作 動 を遅らせ る群 (AE 群)を新た に設 け,
実 験1
のA
群,
P群にあた る群と 再度 比較 する.
方 法 被験 体実 験 開 始時生後約 85日の実 験 歴の ない Wistar 系 雄 ラ ッ ト24匹
,
平 均 体 重は約3409,
維 持 等の方 法は実 験1
と同 じ.
装 置 実験1と 同じ,
手続き 実 験1と同 じ手順で,
飢 餓 リズム の形 成, ハ ン ドリン グ,
走路へ の馴 致を行なっ た後,
すべ ての ラ ッ トに 6 日 間で計30試行の連 続強化走行訓練を行なっ た.
連 続 強 化 走行 訓練に関 する手 続 き も実 験1 と同 様である.
連続強 化 最 終 日のデー
タを もとに走行 時間におい て ほぼ 等 質 な山 本 :長 走 行 時 間 分 化強化と付随行動
95
3
群 (各8
匹 )を 構 成し,
以 降26
日間 計260
試 行の DRLR 訓 練を行なっ た.
Anterior−Midpoint
(AM ) 群は実 験 工 のA 群に相当し, 出発箱 ドアを 上げて か らP4 を切る ま での走行時間が4
秒以上 だっ た場 合,
P4を 切っ た時 点 でフ ィー
ダー
が動 作し,
ペ レ ッ トが落される.
Anterior−
Endpoint
(AE
)群で は, AM 群 と同 じ く第4区 画ま での 走 行 時 間にDRLR
が適用 される が,
実 際に フ ィー
ダー
が動ぎ始め るの は ラ ヅ トが餌皿上の P6 を切っ た時点となる
、
Posterior−
Endpoint (PE )群は, 実験1
のP
群に相当し
,P2
か ら P6 まで の 4区 画の走 行 時 間が4
秒 以 上の時,
直ち に フ ィー
ダー
が動ぎ, ラ ッ トが待 機してい る餌皿にペ レ ッ トが 落 される.
報 酬は 45mg ペ レ ッ ト3
個で, 実 験1
と同じである.
試 行 間 間 隔は約15
秒で,
5秒 程短か くし た.
その他の試 行手順はすべ て実験1
と同 様であっ た、
結 果3
群の報 酬獲
得 率の推 移 を Fig・
4に示 す,
最 終40
試 行で の 3群 間の報 酬 獲 得 率の差は,
Kruskal−Wallis
検 定に よれば統 計 的に有 意であった (X2= 11.
64,
df; 2,
P
〈.
05
).
実 験1
の結 果で述べ た と同 様の方 法で 群 間の 差を み る と,AE
群とPE
群の差は 統計的に有意 (U
= 8,nin2 ;8
、P
く.
05)であっ た が,P
E
群とAM
群の差 は認め られな か っ た.
AE 群は AM,
PE 両群よ り成 績 が 良い と 言 え る.
% 0 6 04 02 3 思 芦 冨 ヨ 邸 30 【 も 2 話 9」
£ 」 2 3 4 5 6 7 8 9 10 11 12 13 BLOC κS OF 20 TRIALSFig.4
Percent
of rewarded trialsfor
Groups
A −
M,
A −
E,
and P・
Ein
Exp.
II.
次に各群の反 応プロ フ ィ ル (Fig.
5)を検討 する.
AE 群とAM 群で は そもそも成 績の差があるが,
報 酬 試 行の みの反 応プロ フ ィ ル でみ て も,
両 群の 付 随行動には 差 異 が ある よ うに思わ れ る.AE
群で は付随行動の出現位置 は区 画1,
2に集 中し てい るが,AM
群で はあま りはっ き りせず,
出 現 位 置に個 体 問のばらつ きが大 きか っ た.
観 察 された行 動 型に おいて も,
AM
群で はAE
群に比べ て 様々 の ものが み られ,
ト ポグラ フ ィー
にお け る個 体 間の三
き
国
匪一
ト σ Z一
ZZ コ 04 6S 骨9,
Fig.5
Changes
of response profilesin
Exp .
II.
Running
−
ti皿 e of each segment for
Groups
A−
M,
A−
E,
and P−
E in 丘rst 20DRLR trials(top row )
.
81・
100th
trials (middle row ),
and last40
trials(botto
皿 row ).
変 動 嫉 も大であっ た と思われる.
考 察AE
群はPE 群よ りも良い成 績を 示 し た,
強 化刺激を 与える地 点 を揃え た場 合に は , 付 随行動の出現を強 化刺 激か ら遠 くの地 点に要 求 する ほ うが,
その形成・
維 持が 容 易であっ た わ けで,
こ の事 実は中間行 動の 概 念が予 測 する ところ と一
致 する.
ま た,
報 酬 を得る た め に要求される反 応基準は区画1
か ら4まで で同じ で あ りなが ら,
2次 強化刺激 (フ ィー
ダー
音 )の呈示 を遅 らせ て 1次 強 化 刺 激 と 共に 与 えた AE 群は, P4 の地 点で フ ィー
ダー
音 を得るAM 群よ り 明確に成 績が よ かっ た,AE
群が6
区画 を 4 秒十α以上 で走る方が,
AM
群が前 部4
区 画 を4
秒 以 上で走る よ り 容 易なのだ との議論 も考え ら れ る が,AE
群が全走路を 4秒 +α以上で走っ た と して も前 部 4区 画を 4秒 以 下で 走っ て は強 化されない手 続 きであ り,
付 随 行 動の出現位 置 と,
強化刺激 あるい は 2次 強 化 刺 激の与 え ら れる位 置 との関係を考 えるべ きであろ う,
付随行 動が出 現 する位 置か ら遠い地 点で強 化刺激 を与え た方がこの 付 随 行 動が 維 持 され や すい とい う事 実は, 再び中 間 行 動の概 念が予 測 する とこ ろに有利であり, 偶発 強化に よ り付 随 行 動 自96 基 礎 心 理 学 研 究 第
1
巻 第2
号 体が 強 化 さ れ,
維 持されて い るとい う考 え方に は不 利で ある.
強 化の遅 延の法 則に従えば,
遅 延の短い方が強 化 の効 力は大 きいはずだ か らである.
しか し 問題 点 も残る,
部 位 別の DRLR がある 程度有 効 なのはそ もそ も何故で あろ うか.
実 験1
の PE 群で は 訓 練に伴 な う成績の向上は 明確では な かっ た が, 反 応プ 卩 フ ィ ルが条 件へ 適応する傾 向は認め られる,
ま た走 行 時 間 も平 均 値で わずかに大 き くなっ てい ぎ,4
秒をほぼ 中央に し た正規分布に近づい てい く,
前 実 験で は同 じ実 験 条件の P群で成 績の 向上 も認め ら れ た.
区 画3か ら区 画6
まで の走 行 時 間の 長 大 化とい う与え ら れた条件にあ る程 度 対 応しうるこ とは 明らかであ り, こ の走 行 時 間 を 単一
の反 応の ア ナ ロ ジー
と し て み ることも十 分 可 能であ る,
従っ て,
Staddon の ように反 応 系列内の個々 の反 応 要 素に着目 し,
その生成要 因 を 考 える molecular なア ブ 卩一
チ のみ で走路のDRLR
を 説 明し ようと し ても,
中 間 行 動と終結行 動とい う概 念の み の現 状で は無理 があ る.
こ こで若 干の作業仮説を提 出し,
検 討してみ よ う.
1) 長 時 間 方 向へ の分化 強化に際して 「時 間か せぎ」 をするよ うにみえる付 随 行 動の発生機序は複数 存 在 す る,
Staddon の言う中 間行動は その主なひ とつ だ が,
他に も, 走 行に より生 ずる刺 激 布 置の急激な変化がひ ぎお こ す探索反応等,
行 動の変 動 性を高め る 諸要 因はすべ て こ れに該 当する.
PE 群で の付 随行動は強化刺激 との位 置 関 係か ら み て,
中 間行動に由来す るもの とは 考え に く い.
ま た実 験1のM
群の結 果が 示唆 すると こ ろに よ れ ば,
ある付 随 行 動 が生じ,
その結果走 行時間が延びて報 酬 が 得られた と して も,
その発生機序自体が安 定し た も のでな け れば, その付 随 行 動は反 応 系列内に安 定し て維 持され ない であ ろ う.
2) 動物は複数の反応の 連鎖から なる反 応 系 列 を その ま まの かた ちで 学 習し うる (DeCasper &Zeiler
,
1977).
こ の過 程は 道 具 的 条 件づ けVこよる と考 え られ る,
付 随 行 動が単 独で強 化 さ れてい ると考 えにくい以 上, こ の ような molar な考 え 方が必 要 となる.
た だ, 付随行 動 が発 生し に くい状 況で は結 果と し て走行時間の 長 大化 も起りに くい か ら,
そこでの反 応 系 列は強化さ れず不安 定な もの と な ろう.
ま た,
こ の 仮説は動物が 「時間ど り 行 動 」を学習すること, な らびに内部に抑制過 程を想定 するこ と を排 除 するもの で はないt3
) 強化刺激は そ れ に対 する接 近 反 応を誘発さ せ る.
従っ て反応 系 列の 強 化と, 走行時間 短縮の 効 果の, 二 つ の相 反 する効 果 を 持つ こ とになる.
こ の よ う なコ ン フ リ ク ト事 態のなか で,
維 持可能な 反 応系列 と報 酬の 頻 度は互い に影 響しあい な が らバ ラン ス を とっ て お り,
各 個 体の反 応プロ フ ィル は こ の均衡点上の所 産で あ る.
実験1
のM 群で訓 練してい く程 成 績 が下 がるのは,
走路 の中 央 部 位で付随行 動を生じ さ せ る要 因が少 な く,
強 化 を もた らすよ う な適当な 反 応系列が形 成で きない ま ま非 強 化に対 する耐 性が 上昇し,
無 報 酬に よる 反応 系列の変 動 性増 大の効 果が次第に減 衰してい っ たか ら であろ う,
即ち均衡点 が変化し てい っ た と考え られる.
実 験 III 実験皿の考察で述べた作 業 仮 説につ い て 検 討を加え る.
実 験皿 では走 路 全 体の走 行時間に関し てDRLR
訓 練 を 行 な うが,
これに先 行 する連 続強化 走行訓練の試行 数 を 群 間で変 化さ せ,
後の反 応プ ロ フ ィル の異 同を み る ことに する.
そ れ ぞ れの 群は DRLR 移 行 時に異なっ た 反 応 系 列を持っ て いるはずである.
十 分 走 行 訓 練 を行 な っ た群は,
走 行 時 間が短か く走 行 反 応のみの連鎖と なっ てい ようし,
連 続強化の走行訓練を う け ていない群に は 反 応の系列化は生じて いない はずである.
ま た DRLR 移行時に各群に期 待できる報 酬 獲 得 率 も大 き く異 なっ て い る.
そ れ ぞ れに異なっ た反 応 系 列 と報 酬 獲 得 率で分 化 強 化に さ ら さ れるな ら ば,
維持 可 能で かつ ある程 度の報 酬 を もた らす 反 応 系 列へ の各 群の到 達 過 程 も当 然 異なっ て い ると推 測 される,
同 じ手 続 きで訓 練を続 けた後,
各 群に反 応プ卩 フ ィ ル の差 異が認め ら れ る な らば,
これ は 過 去に形 成し た反 応 系 列の差 異,
お よ び そ れに対 する強 化の差 異に よ るものであり,
異な る反 応 系 列が道具的条 件づ けに よりそ れ ぞれに学 習可能で あ るこ と を 示 唆す る,
付 随 行 動が何ら か の機 序に より一
律に特 定の部 位に 生じ, 変化の余地の ない もの とは考 えに く くなる から,
複数の生成要因 を持つ とい う作業仮 説に対 する支 持とも な ろ う,
ま た, 走路 全体でDRLR
を行なっ た時,
どの位 置で,
どの くらい の比率の ラ ッ トが付 随 行 動を 示すか,
と い う デー
タ は 末だ報 告 さ れて いない の で,
実 験皿 では個々の ラ ッ ト の反 応プ ロ フ ィ ル の検 討 も行 な うことにする.
方 法 被 験 体 実 験 開 始 時 生 後 約 100 日の実 験 歴の ない Wistar 系 雄 ラ ヅ ト24匹 を 使 用し た.
平 均 体 重は約 3509.
維 持 等の 方 法は実 験1,
」と同じ である.
装 置 実 験1
,
ffと同じ.
手 続 き 予 備訓練 :実験1
, 皿 と同じ,
山本:長 走 行 時 間 分 化 強 化と付 随行動 本訓 練 :予備訓練最終日の無 報 酬 馴 致 試 行で の ベー
ス ラ イ ンデー
タをも とに24
匹の ラ ッ トをほぼ等 質 な3
群 (各 群8
匹)にわけ,
0−
CRF 群,
20−CRF
群,80−CRF
群と する.0−CRF
群は第1
試 行よ りDRLR
で 走 行さ せ た が,20・
CRF
群で は20
試行目まで , 80・
CRF 群では80
試 行目 まで は連続強 化で走行させ,
その後 DRLR に移 行 させた.
DRLR の総 試 行 数は全 群200試 行と した。 連 続 強 化か DRLR か に関 わ らず,
すべ て の ラヅ トを 第1,2
日 目 は各 試 行,
3,
4 日 目 は各4
試 行,
5
日 目は8
試 行, 6 日目以 降は 1口10試行 ずつ , 試行間間隔 約15秒で走行 さ せ た,
連 続 強化試 行では45mg
ペ レ ッ ト3個を試 行 実 施 前 に 目標箱内餌皿に お い て から走 行 させ た,
DRLR 試 行で は実 験 者 が 出 発 箱 ドア を上 げてか ら,
目標 箱 内 餌皿上のP6
をラ ッ トが切る ま での時 間, す な わ ち 走 路 全 体の走 DEDRAW 旺 酷 喞 15 ロ ム O \、
ン/
幽
終
3
丶
丶
袙
β巳
4 ・ α ρ 口 A し し コ o−
CRF ●20−
;RE4 邑ひ一
CRFた
/
心
\ 渓 U韃
。
●
β{
E \ d 囂 二 OO 」 o,
o 97 行 時 間 が4
秒 以上であっ た場 合,
ペ レ ヅ トを 3個 放 出さ せ た.
その 他の手 順はすぺ て実験1
,ll
と同 様で ある,
.
4 3「ti口Ioclt 結 果DRLR
訓練 開始後 最 初の20試 行で得ら れた報 酬 獲得 率 は O−
CRF 群が68%,20・
CRF
群 が,
39
%,80−CRF
群 が30%であっ た が,
こ の差は60試 行 付 近で 消失し,
訓練 最終20
試行で は 0−CRF
群が58%,
20−
CRF 群は,
60 %, 80・
CRF
群は59
%であっ た.
Fig.
6に 各 訓 練 期における 各群の反 応プ ロ フ ィ ル を 示 す.
なお長さの異な る各 区 画 を直 接 比較する必 要 上, メー
トルあた りの 所要 時間に換 算し な お し て図 示し た.
訓練 最終ブ ロ ッ ク の各群の反 応 プP フ ィ ル の差異を 調ぺ る ため に,
報醐試行で の個体平 均値を用いて群(3}×区 画 の分 散 分 析 を行 な っ た とこ ろ,
区画の主効 果 (F=
・
13.
21,df=
5,105,
P<.
05)の他 に, 群と 区 画の交互作 用 (F=
2・
01.
df・
.
10,
105,
Pく・
05) が統計的な有意差を 示 した.
報 酬 試 行で の反 応ブ P フ ィ ル は群に よ り異なっ てい る と言える,
なお最 終プロ ヅ ク 全 試 行の平 均 値ではこ の交互作用は認められ な かっ た.
20・
CRF 群は他の群と 比べ , 区画2
での走行時間が長い ラ ッ トが多か っ た が, こ の群の個体毎の最終40試行で の a4 oo qG一
q2 sreじ
L 1Z3 唖 56SFG.
23456Fig,6
Changes
of response profilesin
Exp .
III.
Running ・
time per 皿 eter of eachsegment
for
Groups
O−CRF .
20−CRF ,
and 80・
CRF
in first 20 DRLR trials(top row ),
4
レ60trials
(middle row ),
andlast
20trials(
bottom
row ).
0
.
4宀
匠 QC こ.
a2 器一
}
OAoo■
」 oo一
〇2 OA qD 0 6>
丶
ノ
8 O O ●/
r\
\
潟
一
Ql 2 3 1 2 3 4 5 6SO9.
Fjg.7
Response
profiles of individual ratsin
Group
20・
CRF .
Open
circle :first
20
DRLR
trials,
solid circle :1ast
40
DRLR
98
基 礎 心 理 学 研 究 第 1巻 第2号 叫 =響
レ O =一
72 , ’ ( ト O ト S匚6 瓢 匚 ” τ RU 髄撹1閥G T聖隈E 3 6 9 Sfe SEC lbS12GsG ユ } 9 5 efill
.
‘ ,: e Sb−s i65“
5se砧t5 ユB betら
ら
,;li6,
,
も
311
° 乙eS 1 設 i t 心 2 1 1⊃
ヱ3 z l3 2 1°’Zz コ運 ’fxllll
と 1 i1 2 1Fig.8Multi −
scattergra 皿 of total running timeand segment running
.
timefor
Rat
l
in
Group20−CRF .
Coordinates of a plotteddigit
which indicates the nu 皿 ber of seg−
ment show the segment running time on the abscissa
,
and the total running ti皿 eof the same trial on the ordinate
.
反 応プ ロ フ ィル (黒 丸)を Fig
.
7
}こ示す.
Rat
3,4
の よ う に区 画5,
6で走行時間が長い例も存在し てい る.
図に は DRLR 訓 練 移 行 最 初の20
試 行の 反 応プ ロ フ ィル (白丸) もあわせ て 示 し た が, これ と, その20試 行の報 酬 獲 得率 か ら, 個々の最終的
な 反 応プロ フ ィル を 予 測 するこ とは 困 難の よ うに思え る.
他の群で も群 平均値に よる反 応ブ ロ フ ィ ル とは異 なる反 応プ卩 フ ィル を示し た個 体は若 十数 存在し て いた
.
Fig.
8に は,
Fig.7
でRat
1
「
と して 反 応プP’
フ ィ ル を示し た個 体のDRLR
最 終40試 行に つ いて,
縦 軸 (基底変数 )に分化 強化の対 象と なっ た総走 行 時 間,
横 軸 (クロ ス変 数 )に各 区 画の 走 行時間を と り,
各 区画の番 号をプ P ッ ト し て,
多重散 布図 とした ものを 示 す.
総走行 時間の長 短に関わっ て い るの は区 画2お よ び区 画1
の走 行時間であり,
他の区 画の沌 行 時 間は ほぼ…
定 で あ ること が読み取れ る.
各 試 行 毎に細か くみ ても 付 随 行 動が生 ずる位 置は動い て いない ことになる.
他 個 体の ほとん ど で も特定の区画の走行 時間の みが変 化 する 同 様の散 布図 が得られた が,
報 酬 獲 得 率の低い もの に は 例外 もみ られた,
考 察 報 酬 試行のみ を ぬきだすと群間の反 応プロ フ ィ ルの差 異が確 認された.
有意 差の でなか っ た全 試 行を まとめ て の 検定に は, 走路 をかけぬけ 明確な付随行 動を 示 さ な か っ た無報酬試行のデー
タが含ま れ てい る,
こ こで は付随 行 動の 出現 位 置の群 間の差 異を 問題に し て お り, こ の差 異は存 在し ていた と みなし てよい.
各々 の群 あるい は個 体 が なん ら かの 要 因に よ り違う反 応 系 列を構 成し た 場 合, 同 じ分 化 強 化 手続 きに さら されても, 強化に よっ て それ ぞ れの反 応 系 列・
反 応パ ター
ン は それ 自体とし て学 習 さ れ う る ものである と考え ら れる,
20・
CRF 群では,DRLR
移行時に は強 化 刺 激に近い 地 点で の 走 行 反 応 連 鎖は既に か な り強 固に形 成さ れてお り,
出 発 箱よ りの部 位の 反 応 連 鎖の変 動 性が比 較 的 大 きか っ た ため に, 区 画 2,1の地 点に付 随 行 動を持つ反 応 系 列 が 形 成さ れ,ある程 度の 報酬 を も た ら すこと もで き, かつ 維 持可能で あっ た と考 え られる.
な ぜ 区 画 1で はな く区 画2が滞 留 区 画と な りや すか っ たの かは,
出発 箱のギPtチ ン ドアを 上 げる 際の 試行手順 と も関係すると思 わ れる が, まだ明 確 な 説 明は で きない.
80・
CRF 群は, 最 初に完 全 な 走 行 反 応 連 鎖を形 成して お り,
DRLR 移 行の手統き は消 去 手続 きと 短 期 間等価であっ た はずである,
直 線走路では一
般に消 去を行な う と 目標 箱よ り の部位の走行速度が他の部位よ り早 く減 少しだすことが知 られて お り (Wagner ,
1961
),
本 実 験でもまず 最 初に強化刺 激に近い地 点か ら反応 系列 の変動性が 大 と なっ た と 思 わ れ る.
そ し て こ こ に長 時 間 を要する反 応が挿入 さ れ ることに より, ある程 度の報 酬 が 得 られる ようになり,
均 衡 点 を上 下し ながらも維 持 可 能な反 応 系 列と して安 定し た と考え ら れ る.
実際に80−
CRF 群では他の群に比べ て, 滞留区 画が区 画 5,6
であ っ た個 体の数が多かっ た.
O−CRF
群は反 応 系 列の形 成に 自由 度が大きかっ たはずで , デー
タに お い て も滞 留 区 画 の バ ラツキ が個体間で大きかっ た,
付 随 行 動 の 発 生 機 序に は 多 くの ものが考 え られる こ と, ど の よ うな要因に よっ て形 成された に せ よ反 応 系 列 自体が強 化に よっ て学 習 され うること, 報 酬 獲 得 率 と維 持 可 能 な 反 応 系列に は均 衡 点 が あり,
報 酬 獲 得 率 が 高 す ぎて も低 すぎて も反 応 系 列に は 変容が起る こと, 以 上の 作 業 仮 説は実 験1H
の結 果を比較的 うま く説 明できる と思 われる.
これ まで , 付随行動 自体では なく, そ れ を含む反応 系 列が強 化さ れ る と考え てきた,
手続 ぎその もの は, ま さ に反 応 系 列の時 間 的 特 性に対して分 化 強 化をか けて いる わけである し, 反応 系列内の付随行 動が直接に偶発強化 されて い るとい う説に対し て は, 実験工, ∬ を とお し て 否 定 的 な事 実が得 られてきた,
実 験皿 の Fig.
8 に示さ れた結 果か ら,
総 走 行 時 間 を 左 右 するものはその個 体に とっ て の滞 留 区 画で の走 行 時 間の み であり,
従っ て分化 強化に おける強 化・
非 強 化の フ ィー
ド バ ッ ク に感受 性を 有し てい るの も多分 付随行動の み であろ う とい う議論が山本;長 走行時 間分 化強化と付 随 行 動 再び 生ずるか もしれない
.
し か し,
付 随行 動は どの 区 画 に も 出現し う る もので は な く,
その個体毎に定まっ た特 定の 位 置に のみ 出現 する とい う事実は,
生 起し う る位 置 が反 応 系 列 内位 置と し て定まっ て お り,
反 応 系列 を ぬき に し ては考え られ ない ものであるこ とを意 味し ている.
実 験皿 で は, 立 ち 上り,
側壁に向っ ての跳 躍 等の際 立っ た付 随 行 動も観 察さ れ た が, これらの反 応が直 接 強 化 さ れて い るな ら走 路の 他の 部位で もこれ らの反 応の生 起 頻 度は上昇する はずで ある.
し か し その よ う な事実は なか っ た.
どの よ う な 反応をする か では な くどの部 位で どの ような反 応をする か が学 習され ていたこ とに な る.
学 習 さ れた反 応 系列内の各 要素 を繋 ぐ刺 激は内受容 的な 刺 激 の み とは限 らず,
空 間上に配 置 され 走 行に伴っ て変 化 す る外 部 刺 激の役 割 も大 きかっ た と思われる.
Staddon の言 う中間 行動は DRLR の付 随行動をある 程 度 説 明し う るものの
,
多 少のずれ も存在してい る と思 わ れ る.
中 間行 動は一
群の行 動型に対し てつ け ら れ た名 称であり説明のため の概 念で は ない し,
DR しR
で の事 実 に もあ わ ない と すれば,
時 間 上の反応 系 列と空間 上 の 反 応系列の相 似 {生の 仮 定は と りあ えず 取り下 げるべ きであ ろ う・
し か し, DRLR での問 題は強 化と空間上の反 応 系 列 内の変動性の問 題と して捉える こと が で き,Staddon
(1976
)の試 論と 同 じ観 点か ら,
今度は 空 間 的 布 置 内の 反 応 系 列の た めの試 論が必 要と な ろ う.
DRLR で は空 間 的 要 因と時間的要 國が交 絡して い るが,
これ を分離して 検 討す る実 験 も 可能と思われる.
今後の課 題と し たい.
要 約時間 分 化 強 化 手 続 き を動物に適用する と
,
定 型的な付 随 行 動 がし ば し ば観 察 さ れる,
本研 究は こ の付 随 行 動の 発 生機 序と機能の検討を目的とし,
反 応 系 列の分析に好 適な直 線 走 路の長 走行時冏 分 化 強 化 (DRLR )手 続 きを用 いた.
付随行 動の説 明にあたっ て は,
Skinner
の迷 信 行 動の 解 釈と同 様に,
偶 発強 化に よ り形成 さ れ る とする説明が まず可能で あ る.
ま た,
Staddon の指摘する中間行動 と 類 似の, 定まっ た刺 激 布 置の中で定 型的に誘発さ れ る副 産物的 行動だ とする説明 も11∫能で あ る,
上記2仮 説の検 討の た め,
実 験1,
1 ではDRLR
を走 路上の異な る部 位に適 用し,
強化 刺激呈 示地 点 との位 置 関 係 を 比較検 討 し た.
結 果はL
走路の中央部位に長時間 走 行 を要 求し てもラ ヅ ト の 成 績は下る一
方であっ た.
2.
強化刺激呈 示地 点 と長 時 間 走 行を要求する部 位との 距離が離れ てい る 程成 績がよ い.
99 3.
強 化 刺 激 呈 示 地 点に近い部 位で も付 随 行動はある程 度 生じ うる.
L
記の事 実の1
と2
は, 偶 発 強 化 説を 否定し中間 行 動 説を支 持 する が,
3は中間 行 動 説の みで は説明で きない.
そこ で,
付 随行動の発 生 機 序は複 数存葎 する こ と,
反 応 系 列自体が学 習 されること,
報酬 獲得率 と維 持 可能な系 列に は均 衡 点が あ るこ と,
以 上 3つ の 作業仮説 をた て,
実 験皿 で検討し た.
実 験亅1
[で はDRLR
に先 行 する連 続 強 化 走 行の試行数を群 間で変化させ ,DRLR
は 走 路 全 体 の走 行 時間 を 用い て全 群 同一
手 続 きで行 なっ た.
結 果は 4.
各群は異なっ た反 応 系 列 を 形 成した.
3
つ の作 業 仮 説に よ り,
各々 の群の反応 系 歹旺の形 成 過 程 は 説 明 可能である.
引 用 文 献Amsel ,
A .
& Rashotte,
M .
E
l969 Transfer of experi 皿 enter・
impQsed siow−
response patterns toextinction
of a continnuousiy rewarded response
.
fozarnat
cゾComParative
andPhysioJogicalPs }’
chOlagy,
69
,185−189.
DeCasper,
A,
J
.
&Zeiler
,
M,
D.
1977Ti
皿eIimits
for
completing fixed ratios.
IV.
Components ofthe ratio
・
fournal
of tlte Experimental/AnaLvsis
(ゾ丿3ehavior
.
27,
235−
244.
Kramer
,
T.
」,
& Rilling,
G .
M ,1970
Differentlalreinforcement of
low
rates :Aselective critique.
PSI,cltoloArical
BPtlJetin
.
74,225−
254.
Laties
,
V .
G.
,
Weiss,
B.
,
Clark, R.
L.
&Reynolds,
M
.
D.
19650vert」
‘
mediating”
behaviorduring
temporally spaced responding.
fournal
Of
彦he
Ex −
perimental
Anal
夕si’
sOf
Beh αvior.
8,107−116,
Laties,
V.
G.
,
Weiss,
B .
&Weiss,
A.
B.
1969 Further observation of overt“
mediating ”be−
havior and the
discrimination
of tirne.
∫ourn αg Qプthek
;xPerimental Ana {}・
sisOf
Behavior,
12,43−
57.
Logan ,
F.
A .1960
1ncentive:H
∂w the conditionsげ reinforcement affect
tlte
Performance
げ rats.
Yale University Press
.
McFarland ,
D .
エ19660n
the c&usal and function−
al significance ofdisplacement
activities.
Zeit−
schriftftir
TierpsNc
加 logie,
23,
217−235.
Rashotte
,
M.
E.
& Amsell,
A1968
Transfer
of slow−
respOnSe ritUalS to eXt 圭nCtiOn Of a COnti.
nuously rewarded response
.
∫ourua9 げ Compar−
ative and Physiological Psptcholo
.
gy,
66,
432−
443.
Rashotte,
M.
E.
& Amsel,
A,
1967 Acquisition and extinction,
within subjects,
of a continuouslyrewarded response and a response learned un
−
der discontinuous negatively correlated reward
.
Psychonomic
Science
,7,257−258.
Richelle
,
M ,
&Lejeune,
H 、1980
Timein
ani〃忽b
θhavior.
Perga皿 on Press.
100
g
en
,bpa
*
bl
zaac1ts
ag2e
Skinner, B. F. 1948 Superstition in the pigeon.Jburnal
of
Erperimental
RsycholQgy,38,
i68-172.
Staddoh,
J.
E.
R.
&
Simmelhag,
V.
L. 1971 The`'superstition" experiment: a reexamination of
itsimplications
for
the principles of adaptive.behavior.
PSycholqgn'calReview,
78,3-43.Staddon,
J.
E.R. 1976 Learning as adaptation. inEstes
(Ed.),
H2xndbooleof
laarni,rg
and cognitiveProcesses.
Vol
II.
Conditioning
andbehavior
theo-ry.
Erlbaum
associates, pp.37-98.
Wagner,
A.
R.
1961
Effects
of amount and per-centage of reinforcernent and number of acquisi-tion trialson conditioning and extinction.fonrnal
of
Emperimental
Rsycholcrgbr,
62,234-242.
Wilson,
M.
P.
&
Keller,
F.
S.
1953
On
the
selective reinforcement of spaced responding.IburnalofComparativeandPlpsiolagn'calRsycholag),,
46,190-193.