【研 究 論 文】 UDC ;624
.
023.
85 ;624.
041.
2 日 本建築 学 会 構 造 系論 文報 告 集 第356 号・
昭 和 60 年IO月不
安
定
ト
ラ
ス の
剛
体変位
と
安 定 化 条 件
正 会 員 正 会 員 田半
中
谷
裕
尚
*彦
* *1.
は じ め に1
形状 (幾 何学的 )非 線 形 問 題に は,
(i
)安 定な構 造 物に荷重が作 用した と き に不 安 定とな る 「構造 安 定問 題 」,
(iD
つ’
り屋 根や膜 構 造な どに生じ る 「不 安 定 構 造 の構造 問 題 」,
など が ある。
これ らの問 題に お け る共通 点は,
不安定の時 点に お け る力 学 的 挙 動の調査 が不 可欠 で あ ることにある。 しか し,
不 安 定と な る時点では, 理 論 解 析に必 要と な る係 数マ ト リ クス が特異と なっ て お り,
理論構 成が複 雑に な る と と もに,
数 値 解 析も 困難と な る1)・
z) Q 本論文は特 異 性や長 方マ トリク ス の処 理に有 力で あ る 「一
般 逆行列」3L4L5} を利用 し て (の の問 題を検 討す る もの であ る。
ケー
ブル構 造などに は微 小 変 位の範 囲 内か ら み る と,
剛 体とg
て運 動の 自由度を持つ , い わ ゆる不 安 定 構造 が 用い ら れ ること がある。
しか し,
これらが構 造 物と して 採 用さ れ る理 由は,
(1 ) 有限変位の範囲に お い て, 剛体と しての運 動の 自 由 度が拘 束さ れる構 造で あ るこ と (2) 自 己 応 力 (初 期 張 力な ど)の導入 に よ り,
正の 幾何剛性を付 与 し得る こと に あ る。 本論文は, これ らの 2項 目 を検 討 する た め,
微 小変位の範 囲にお ける剛 体 変 位の抽 出,
有 限変位の範 囲 にお け る剛体変位の存在 条 件, 自己応 力の存 在 条 件,
自 己応 力の導入 に よ る安 定 化 条 件,
な どを 明ら かにす るも の であ る。
な お, 定 式 化に あ たっ て,
構 造モデル と し て は剛体 トラ ス構 造を採 用 し て い る。
本 論 文は 7節か ら成っ て いる。1
節は本論文の 目的と 位 置 付 け を 与え たもの であ る。2
節は3
節以下の記述に 必要とな る幾 何 学 的 関係 式 (変 位と伸 びの関 {一 )一
と力学 的 関 係 式 (つ り合い式 )を有限変位の 範囲 ま でEuler
表 現に より定 式 化し たもの であ り,
特に新しい こと で は な い。
3節は 4節 以 下の記述 に 必 要 と な る微 小 変 位の範 囲にお け る トラスの分類を一
般 逆 行 列を用い て行っ た も 本 論 文の一
部は文献 〔5)で発表し た もの であ る。
寧 千 葉 大学 教 授・
工博 林 東 京 大学 生 産 技 術 研 究 所 教 授・
工博、
(朗和59年5月23口原 槁 受 理日,
昭 和60年4月22日改 訂 原 稿 受 理 日,
討 論 期 限 昭 和 61年1月末日 ) の で,
真柄等Z)に よ る通常の行列 理論を用い た分 類と同 じ内容であ る。
し か し,
一
般 逆 行 列 を利 用し た線 形 方 程 式 系の解の 存在 条 件 式に よ り理論 構 成は単 純かつ わ か り や す く なっ ている。
ここで採 用した解の存 在 条 件 式 も数 学と して新しい も の で ないが:〕,4
お よび5
節の理 解 を 深め る た めに,3.
3
節に おいて 解の存在条件の物理的 意 味を述べ る と と もに, 付録に解の存 在条件の説明 を付け 加え て おいた。
4,
5,・
6節は本論文の主題で,
微小変位の範囲におい て自 己 応 力の モー
ドを持ち (通 常,
不 静定構 造と呼ぶ ), かつ,
剛 体 運 動の自由度を持つ (通常,
不安定構造と呼 ぶ) 剛 体 トラ ス構 造に対し,
有 限変位の立 場 か らの分類 を 行っ て いる。 4節で は有 限 剛 体変位の必 要 十 分な存在 条 件を示し,
5節では自己応 力の導入 に よ る幾何剛性を 構 成し,
剛 体 変 位モー
ド との関係 を 述べ てい る。
6節で は,
自己応 力の 導入に よ る安定化の十 分条件を定式化し, 4,
5節の結 果を利用し て安定の 必要条件を述べ た。
ま た,
安 定 化の た めの 自己 応 力導入につ い て説 明し た。
7節で は3種 類の 不 安 定 トラス構 造を利用し, 有限 剛 体変位や自己応 力の導入等の具体例を述べ た。
2.
基 礎 式 2.
1 幾 何 学 的 関 係 式 デ カル ト座 標 (0−
xyz )を座標系と し て採用す る。
節 点 i (座 標 値 :Xt,
yt,
Zt)と節 点j
(X」,
YJ,
ZJ) を 結ぶ 直 線の トラス 部 材を α (α=
1,…,
.
m >と す る (図・
2−
1)。
節点座標 値ベ ク トル と方 向余 弦ベ ク トル を 次式で置く。
Xi x丿 砺 Xt= 銃,
X」=
YJ,
Aa;
μ‘丿・
・
…
(2−1
) 2t 2」 レ‘ノ z.
」 ia (Xj
・
yj・
Zj ) (Xi ,yi,
Zi ) O y x 図・
2−
1 ト ラス部 材と節 点 座 標 値部 材 長を
la
と す れば,
1
。一 [ t (x,−
xn(
xJLxi )]者・
…・
……・
・
_.
_t−一
(2.
2} こ こに,t
は転置を表す。 部 材長ta
を用い る と,
方向 余弦ベ ク トル は次 式と なっ てい る。
・・
−
t
(x厂 Xl>………・
・
……・
…・
…・
・
…・
…
(2−
・) パ ラ メ「 ター
tに関する微 分 をd
( }/dt =
C
)で表す と,
(2−
2.
)式よ りla=
’
tAa (i厂 出 )……・
・
……・
・
…・
・
・
…………
(2−
4)」
α=
t λα(XJ−
」ピt)十tλa (」ヒ丿一
in
・
・
・
・
・
・
・
・
・
・
・
・
…
(2
−
5> 上式に おける あを求め て お く と次 式と な る。
.
1
1
αA
・一t
(±厂th
・)「 吾(x ・−
Xi)”
∵’
’
’
’
’
’
’
’
’
’
”
(2−
6} (2−
4>式をマ ト リッ ク ス表 示すると[
−
t・a刺圭
;
}
−ia
………・
・
……・
・
……
(2−
・) 上 式 を全 部 材に拡 大し,
境 界 処理 を行っ た後,
整理 す る と次 式とな る。
Ai =
・
1 ・
・
…・
・
………・
・
………・
…・
………・
…
(2−8
) 自 由 度 数を n,
部 材数 を m とずるとA
は (m ×n )・
の 長 方マ トリッ ク スとなる。
(2−
8> 式が変位速度i
と伸 び速 度t
との間の関 係 式である。
(2−
8)式をt
に関 して微分 すると,AX
十hi
=lr
−
,A
≡A
(i
,i
)・
・
・
・
・
・
・
・
・
・
…
一
・
・
一
…
(
2−9
) (2−
5)式において,
実 線 部 分がAX
に,
点 線 部分 がAi
に対 応してい る。
.
剛部 材で は,
i
=〜
=0
である か ら ,基礎 式は次の よ う に な る。
(2−8
>,
(2−9
)よ りAX
=・O ・
…・
…・
…・
・
・
・
…………・
…・
………・
・
(2−
1AX
十A
(0,
£ )i =O ………・
………・
…
(2−
11) こ こ で,
(2−11
)式の第2
項をφ
で表すこ とにす る。 つ ま り,φ
;み
(0
,』
th
)i …・
……・
・
…・
・
…・
……・
…・
…・
(2−12
)φ
の部 材 αに対 応す る成 分ψ
。 は,
(2−5L
(2−6
)式に お い て1。
;O
と 置 くことによ り 次 式 と な る。
’
il
・
一一
1
・ (・・…
n
(±,−
ltn
…・
・
…・
……・
・
…
(2−13
)2.
2
力学
印
関係式.
部材a に作 用し て い る軸力 を na とし,
na につ り合っlf
’zi蹈
Xf・・
lj
〜
亭
図・
2−
2 節 点 力と軸力 て いる節 点 力を節 点 iお よ びノに お いて・
んf
}x fta=
fiU
,
La
= 丿5
,・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(2−
14 )f
‘t 。fj
。 。 と する (函
・
2−
2)。 こ の と き:,
部 材 a の つ り合い式は一
λana=fia,
Mna
=f
」a・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
《2−
15)上 式 を構造物全体でま と め る と
Bn =f ・
…
一
・
・
7・
・
tt・
・
・
・
・
・
…
7−・
・
・
・
・
…
一・
・
・
・
…
r−
〔2一
ユ6) こ こ に,
n は軸力ベ ク トル,
f
は節 点 力ベ ク トル である。
〔2−
7} 式 と (2−
15)式 を 比較す るこ とに よりB =
tA…・
……・
…・
・
・
・
・
・
………・
………
(2−
17) が成 立し ていること が わ か るp これ は,
反 傾 原 理と呼
ば れてい る。
(2−
17> 式 を 用いる と,
(2−
16)式は tAn ==f …・
……・
・
…・
・
…・
………・
……
(2−
18) 上 式が軸力n と節点力 ’ との間の関係式であ る。
(2一
ユ8
〕 式 を tに関して微 分し,
増 分 方 程 式を導く と tAh 十tAn=
’一・
・
・
・
・
・
・
・
・
・
・
…
r・
・
一・
一・
・
・
・
・
・
・
・
…
(2−
19} 上 式をj
節点につ い て具 体 的に示す とZ
][M
亢a十Aana]=
Σ fJa…………・
・
・
…一
(2720) a a こ こ に,
Σは 丿節点に集ま る部材の和を,
ま た,
λ。
,
λ。
,
aLa
は (2−
3), (2 :6 ), (2−
14}式で与え ら れて いる 。 自 己つ り合いの応 力 系 を 求め るに は,f =
’=
0に お けるつ り合い式を利 用する。
その場 合, (2−
18),
(2−
19 ) 式は,
tAn
=
0:…・
・
………・
・
…・
………・
…一
(2−
21 ) tA 此十t/1(’,
i
’)n;
0・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
r・
(2−
22) (2−
22)式の左 辺q
第2項において,1=0
の場
合を特にφ
;
tA (0,ま)n…一 …・
・
…・
∴……・
・
…・
……
(2−
23) と置 く こ と にする。
φをj
節 点につ い て 具 体 的に示 す と,
(2−
6)式においてt。
=0
と置き, その結果を (2−20
)式 に代入し て,
6
一軟
〔X
厂t
・・)…・
……・
・
・
・
・
・
…一 …・
・
(2−
24> 以 上の基礎式に おいて,
(2−8
),
(2−18
)式が微 小 変 位 の範 囲にお け る,
(i
) 変 位速度と伸び 速度の関 係 式,
お よ び (ii
)つ り合い式,
.
を与え るこ とになる。 さ ら に,
〔2−9
)と (2−19
)式 を加え,
4個の基 礎 式を 考 慮す る 場合が,
有限変位 (こ こで は,
有 限 変 位の第 1 近似で あるが)の範 囲にお け る基 礎 式と なる。3.
微 小 変 位の範 囲に お け る トラス構造 の分 類 3.
ユ 幾 何学的 立場か らの分 類 (2−
8)式が基 礎 式とな る。
再 録する と, AX=t…・
…・
…・
…・
・
…・
…・
・
……・
…・
……
∵ (3−
1),
上式が解を持つ 必要 十分条件は,
[驫一
AA’
]1−
e…・
…・
・
…・
・
………一
・
・
・
・
……・
(3−
2) こ こに,
Imは m ×m の 単 位マ トリク ス で あ.
り1
,
A一
はA
の一
般 逆 行 列で あ る (一
般 逆 行列の定 義と線形方程 式 系の解につ い て は,
付 録3吃 参 照の こと。
な お,
付 録にある よ う に
,
線 形 方 程 式 系の解の存 在.
条件は必 要 十 分 条 件である。
以 後,
単に存 在 条件と呼ぶ )。
A の ランクを r と する。 つ まり, rank (A)= =r……・
・
・
・
・
…
…・
・
…
…………・
…
(3−
3) こ のとき,
(3−
2)式の係 数マ ト リ ク ス の ラン ク は, rank (塩一
AA−
)=
m−
r・
・
・
・
・
・
…
ttt
・
・
t・
t・
・
…
(3−
4) とな り,
伸び速 度1は各 成 分の間にq=
m−
r・
・
・
・
・
・
・
・
・
・
・
…
tt・
・
・
・
・
・
…
tS・
・
・
・
・
・
・
・
・
・
・
…
(3−
5) の個 数の適 合 条 件で拘 束 されて い る ことにな る。
言い換 零ると,
q は独立な適 合 条 件の数で,
不 静 定 次 数と呼ば れて い る もの である。
次に,
.
剛 体 変 位 を調べ る。 部 材が剛の場 合,
つ ま り, 伸び 速度1が零の場 合に は,
(3−
1)式は (2−
10)式と な る。
再 録す る とAth=
o・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(3−
6.
) (3−
2 )式は満足さ れ る か ら解は存 在す る。
こ の解は,
d を任意の ベ ク トルと して,
次 式で表さ れ る。
th;
[ln−
1里一
A
]i ・
・
・
…
一一一・
・
一・
一・
・
・
・
…
.
・
9…
曁
・
・
(3−
7) こ こ に,
lnは nXn の単 位.
マ トリク ス で ある。
(3−
3)式 より,
A の ラ ン ク は r である か ら, {3−
7)式の係数マ トリクス の ランク は, rank (ln− A
−
A
)=
n:−
r……
…・
…・
……
…・
(3−
8 ) と な る。
P=
n−
r・
tt
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一・
・
・
・
・
・
・
…
一
…
(3−9
) と置 くと,
p は微 小 変 位の範 囲にお け る剛 体 運 動の 自由 度で あり,
通 常,
不 安 定 次 数と呼ばれ ている もの であ る.
。
い ま,
マ トリク ス[ln− A
”
A
]を列ベ ク トルで表す と [右一
A−
A];
[臥,hb …
,彪日………・
(3−
10 ) 〔3−
8),
〔3−
9)式よ り, 上 式にお け る線形独 立なベ ク ト ル の数は ρ個である か ら, そ れをh
、,…,hp
と す る と,
(3−
7)式は次式に ま と め ら れ る。
i= ゐlal +ゐ、d,
+…
+ぬ。a。 ・…・
…一 ……
(3−
11> δ1,…,dp
は任 意の ス カ ラー
で あ り,
h
,,…,
h
ρは剛 体 変 位モー
ドを表してい る。
(3−
10)式の列ベ ク トル のな かには零の もの も含ま れ る 場 合も あ る。
島=0
の場合に はh
∫d
,=
Oで あ る か ら,
0 で ない あ に対 して 剛 体 変 位 速 度は起 ら ない。
また,
hp,
i,…,
毎 の な か で零で ない列ベ ク トル 畆 はh
,,…、
hp
の線 形 結 合と して表 示で き る か ら, 係数a
,を規 定す ること は,
係 数d
,,…,
δρを規 定する こ とに含ま れて く る。
例えば,
h,=kh
,の場 合,hid
,+毎 戯= 苑1(d
,+h6
κ) とな り,a
,, 戯 は任意の パ ラ メー
ター
で あ る か ら,
ど ち ら を規 定し ても,
剛 体 変 位モー
ドh
,を 表し ているこ とにな る。以 上より,
本 論 文で は剛 体 変 位 速 度 詑 を(3
−
7} 式の形の ま ま用い るこ とに す る。 特に 鵡が零で ないh
, の係 数で あ るこ と を 明確に す る 必要の あ る場 合には下に一
を付 し て δ ‘と書 くことにする。
さ らに α‘を成分 と す るベ ク トル を δ と する。
3.
2 力 学 的 立 場か らの分類(2
−
18)式が
基 礎 式と なる。
再録す る と,tAn
=f ・
・
…・
…・
…・
………・
……
.
・
・
……・
・
…
(3−IZ
) 上 式が解を持つ必要十 分条件は [ln−
tAtノ塾一
ユ’=0 ・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一・
・
・
…
(3−
13)一
般 逆 行 列の定 義よ り,
tAtA−=
t(A
−
A
)=A ’A
で あ る か ち,
[ln−
A−
A ]’= 0・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
t・
・
・
…
s−・
…
一一
一
(3−
14) (3−8
),
(3−9
>式よ り,.
係 数マ ト リ クスの ランク は,
rank (ln− A
⊃
A
)= n−
r≡ p……・
…・
……・
(3−
15) で あ る。 こ の式は,
節 点荷 重が剛 体 運 動の 自 由 度ρ と 同数のつ り合い式に よ’
っ て拘 束さ れ るこ と を表して い る。
次に,.
自己つ り合い の内力系を調べ る 。 節 点 荷 重が零 の場合,
つ ま り,f =0
の場 合,
(3−12
)式は (2−21
)式 と な る。
再 録 す る と,
tAn =0・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(3−
16) (3−14
)式は満足 さ れ る か ら,
解は存在す る。
こ の解は,
βを任意のベ ク トル と して=
[lm−
tA−
tA ]β=
[lm− AA
−
]β…・
…
;…・
・
(3−
17) 右 辺の係 数マ トリク ス の ランク は,
(3−4
},
(3−5
}式よ り,
rank (ムーAA ’
)=
m−
r≡ q…・
….
・
…・
一
(3−
18> 上式は自 己つ り合い の 内力系,つ ま り,自己応力(元応力 ) n は,
不 静 定 次 数 q と同じ数の独 立な解を もつ こと を 示し て い る。
こ こ で,
[lm−
AA−
]=
[9L,92,…
,9皿
]・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(3−19
) と して表 記し, 独 立な列ベ ク トル を91,
g2,
.
…,
9qと す る と,
(3−
17)式は次式に ま と め ら れ る。
n=
9iβ,+9認2+…
+99βg・
……・
……・
・
…・
(3−
20) β,,…,
βg は任 意の ス カ ラー
で あ り,
g1,…,
蛎 は自己 応 力の モー
ドを表してい る。
前節の(3
−
7 ),(3−
10 ),(3−
1ユ)式で の説 明と同 様,(3−
19> 式の列ベ ク トルに は零の も の が含ま れ る場 合 もあ る。
9」=O
の場合には,
g,β」= 0であ る か ら,
零で な い βに対 し て自己応 力は生じ ない。 ま た,
g。刊,…,
g皿 の なかで 零で ない 列ベ ク トル 9iCは,
9i,…,
9e の線 形 結 合で表 示さ れ る.
前 節で 述べ た よ うに,
βh を規 定す る ことは β、〜
βq を規 定する こと と同一
内容で あ り,
重 複 するの みで区 別す る.
必要は ない。
以 上よ り,
本論 文におい て は,
n の 形と し て,
(3−
17)式 を 採 用 す るこ とにする。
特に β‘が零ベ ク トルで ない 9iの係数で あ ることを 明 確にす る必 要の ある場 合に は 下 に一
を付して β‘と書くことに する。
さ ら に,
β‘を成 分と す るベ ク トル をβと す る。 表・
3−
1に トラ ス構 造の分類を示す。
次章以降で扱う トラ ス構 造は次式 を満 足す る もの と す る。
p≧1,
q≧1 ………・
・
………・
・
(3−
21) す な わ ち,
微 小 変 位の立 場か ら み て自己 応 力の モー
ドを表
・
3−
1 不 静 定 次 数 と 剛体 運 動の数 力 学的
幾 何 学 的 不 静 定 次 数 q 独 立 な 自 己応力 モr ド の数 解の存 在 条体 の 数 剛 体 運 動の 自 由度 P 解の存 在 条件 の 数 独立な剛 体 運 動 モー
ドの数 持ち (不 静 定 ),
かつ,
剛 体 運動
の 自由度を持つ 構 造で あ る。 3.
3 解の 存在条 件の 解釈 (3−
2}式お よ び (3−
14)式で表さ れ る解の存 在 条件の 内容を説 明す る。
任 意の可 能な剛 体 変 位 速 度 X と節 点 荷 重 ’の 仕 事 率 焼f
は,
’
t を’
=
ti…t[ln− A −
Al]f=
ti… [ln一
ノ{−A
]’・
・
r・
・
(3−22
) となる。
こ こ てfi1
・
fai
・
占
.
軋
ら.
[、。.A −
。],.
4
・.
.
.
(,.
23)占n
・
fan
l 、
と置 く とジfa
はf
に変 換マ ト リ クス [1
。−
A’
A ] を掛け て得 ら れ る 占に対応す る荷重と.
なっ て いる。 言い換え る と,
ta fdは荷 重f
。の仮 想 仕事率で あり,
fd
‘は荷重 ち の atに対 応 する成 分と考え るこ と がで き る。 し た がっ て, 解の存 在 条 件 (3−
14) 式は,
」『α=
O…
一
一
・
・
・
・
・
・
・
・
・
・
…
一
一
・
・
・
・
…
t−・
t−・
・
・
・
・
…
一
一
・
・
…
(3−
24 ) を 意 味し て お り,
・
荷 重の d に対 応 する成 分 が すべ て零 に な ること を示して い る。 別の表 現 を する と,
(3−
12) 式のつ.
り合い式が解を持つ た め に は,
任 意の剛 体 変 位 速 度に対 して仕 事 率が零 とな る荷 重 ’ を選ば なけれ ば な ら ない。
次に,
(3−
2)式 を 考え る。
任 意の可 能な自己応・
力.
n と伸 び速 度1
との仮 想 仕 事 率tfil は,
(3マ17>式より t雁t
;
tβ[lm_
AAL ]1…・
・
………
∵・
…
(3−25
) と なる。
こ こ で,β
=
1 2 飛 ββ
.
.
.
一
β,
ln=
[lm−
AA−
]t
=
と置く と,
t β1
β は仮 想 仕 事 率で あ り,
成分と考え る こ とがで き る。
した がっ て,
の存 在 条 件である (3−
2) 式は,
is
=
0・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(3
−
27) と な り, 伸び速 度の β成分が すべ て零に な るこ と を 示 し てい る。
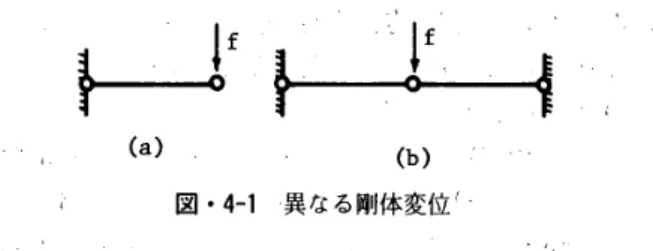
4.
有 限 剛 体 変 位の存在 条件最 初に単 純な例 を考え て み る
。
図・
4−
1の (a),
(b
)lml
,21:
・
・
(3−
26)1
、mlnj は伸び め β,.
(3−
1)式の解}
」
flf
(a)
(b) 図
・
4−
1 異な る剛 体 変位ド ともに微 小 変 位の範 囲 内におい て剛 体 変 位が生 じる。
し か し,
有 限 変 位の範 囲で考え る と,
(a)は剛体 変 位が可 能で あるが,
(b
)におい て は不 可 能である。
本 章で は, 有 限 変位の範 囲で生じ る剛 体 変 位 を 有 限 剛 体 変 位 と名 付 け,
そ の存 在 条 件を考える。 な お,
2章の最 後に述べ た ように,
本 論文で扱 う有 限 変 位は第 工次 近 似の意 味で あ る。卜.
微 小 変 位の範 囲 内におい て,
剛 体 変 位が存 在し て い る こと を前 提と する。 つ まり,
1=
0 に対し て,
(3−
7)式 より,
.
’
.
冗.
」ヒ
=
[ln− ∠
4−
∠
4
]d(コb≧
1
)…
一・
・
一
・
一一
∴・
・
・
・
…
〔4
−
1)∵ 上 式 を (2
−
12) 式に代 入する と,φ
は d の関数とな る。
こ のφ
を用い ると,
(2−
ll}式は次 式 となる。
AX
ニー
φ
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
1
・
・
・
…
(4
−
2)、
(4−
2)式の解の存 在 条 件は,
引
[lm
−
AA−
]φ
=
0・
・
tt・
・
・
…
t・
・
・
…
tt・
・
・
・
・
・
…
t・
・
…
(4
−
3) と な る。
(4−
1)式の 士 を (2−
12) 式に代入 し てφ
を作 り, 零で な い (劇,…
, dρ に対し て (4 −3 )式が自動 的 に満 足され れ.
ば,
有 限 剛 体 変 位 速 度 (dh …,
δ,) が 存 在’
する 』d の (d,+
1,
」・
・
,
丘n)が零でない値で,
(4−
3) 式を満足さぜる こ と が で き なけれ ば, 有限剛体変位速度 (戯+1,
・
…
ヤδn)は存 在し得ない。
こ こ で,
.
(4−3
)、
.
式が満足 さ れ ない場 合1・
つ ま り,
有 限 剛体変位速 度が存在し ない場合につ い て考察し て お く。
い ま,t
=O
の条件下で,
(2−
9>式はAX
=’
i
L.
φ
t・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
∫
・
・
・
・
・
…
曾
・
・
・
・
・
・
・
・
・
・
…
(4
−
4) 上 式の解の存在 条 件は,.
・
[
lm− AA
−
]φ
=
[lm− AA
−
]〜
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
t−・
・
(4−
5) 右 辺を,
(3−
26 )式に対応させ て’
「
』
.
’
i
。 置’
i
,一
[島一
A4一
]1
〒lf
・.
一 ・
……
∵…・
…
(4−6
)lpil
と お く と,
(4−
3)式の解の存 在 条 件は,
(4
−
S)式を参 照 [ し て次 式と な る。・
’
ip
=0 ・
…・
・
…
∴
・
・
・
・
・
…
∴
・
・
・
・
…
一・
・
…
宀
・
・
s−・
・
…
一
(4−
7) 上 式 中’
is
は [lm− AA
”
]の零で ない 列ベ ク トル に対 応す る賑
を成 分とするベ ク トル を 表 す。’
(2−
13) 式か ら わ かる よ うに,
らはをの 2次 形 式であ る が,IF
一
のなかに ら を含ま なけれ ば, 畠キ0,
他の成 分 を,=
O(hキj
)に対 し て (4・
7)式が自 動 的に 成立 す る か ら,
有 限変位 速度ら が存在す ることになる。
こ こで, 6節で用い る式を準 備して お く
。
有限変 位 速 度 らが存 在す れば,
こ の むキ0
, 他の成分dit
= rO {k
キj
) に対し てε β諺β
二
〇……・
・
…………・
…・
……・
…………
(4
−8
) と な る有 限 変 位 らが存 在す る。 5.
幾何岡II性の構成 微 小変位の 範 囲 に おいて剛体変位の存在す る構造 (通 常,不 安 定 構 造と呼ぶ)を安定化す る一
つ の方 法と し て, 自己応 力 (初 期 応 力 と も言う〉の導入 が あ る。
3.
2節で 述べ た よ うに, q≧1
の場 合に は自己応 力は存 在する。
本章で は, (3−17
)式で与え ら れ る自己 応 力 を導入 し た 場 合の幾 何 剛 性の構 成につ い て述べ る。
微 小 変 位の範囲に おいて剛体 変 位 速 度は存 在して いる ので,
(3−7
>式は成 立し てい る と す る。
(3−17
),
(3−7
) 式を再 記す る とn= [
lm− AA
−
]β・
…・
…・
・
・
………・
・
(5−1
) 丿ヒ=
[ln−
A−
A ]dtttt・
・
tt・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(5−
2) (5−1
), (5−
2)式の付 帯 条 件の もとで,
(2−
19)式で与え られ る増 分 方 程 式は,
(2−
23)式を利 用して次式と な る。
tAh 十φ;
’鹽
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一・
・
卜
…
’
・
一・
・
一・
(5−3
} (5−
3}式の解の 存 在 条件はロ
[ln
−
A−
A ]φ=
[ln− A −
A ]f −・
・
・
・
・
・
・
・
…
t−・
・
・
…
(5−4
) (3−23
)式に対 応 させ て, 上 式の右 辺 をja
,fa=
[ln− A
−
A
]f =
… 飢f
「
.
〜・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(5−5
) と 置 く。
こ のと き, (5−
4)式は次 式と なる。
[ln− A
−
A
]φ=
’α…
一・
・
・
…
一・
…
一・
・
・
・
・
・
・
・
・
・
・
…
(5,
6) 3.
3節で説 明し たように,
[ln− A
−
A
]の零で ない列ベ ク トル に対 応する fa の成 分 をf
α
i と すれ ば,
fai
はつ り 合いを 満 足する荷 重 速 度の 毳に対 応する成 分 と解 釈で きる。
荷 重 速 度を変 位 速 度を与え た と きの反 力 速 度と考 え ると,
∫ai は幾 何 剛 性の at成 分と解 釈する こ と もで きる。
な お, (2−
24) 式か らわか るよ うに , φはd
の成 分 を係 数 とする線 形 結 合で表 示され る か ら, a の成 分 を ま とめる こ と に より,
f.=
Kc(β)d と整理 する こ と もで きる。 Kc(β}はいわゆる幾 何 剛 性マ トリク ス である。
次 節で必 要と な るの で,
さら に付け加え て お く。f
。i ts4
,と β,の双 1次 形 式で あり,
もし,
fai
の な か に βκ が ひとつ も含ま れて いな け れ ば,
すべて の β 成 分に対 してfat
= 0・
・
・
・
・
・
・
・
・
…
一・
・
・
…
tt・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(5−
7 ) が成.
立する。
こ の よ うに, 幾 何 剛 性が零の成分 を持つ場 合に は tdfa;
O・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一
一
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(5−
8) とな る変位速度些が存 在す る。 こ こ に,
fgは ∫塵 を成 分と す るベ ク トルを表す 。6.
安 定 化条件 振 動法に よっ て,
自己応 力の導入 に よ る安定化条 件を 検 討する。
節点 iに質 量 mt が あ る と す る と, (2
−
18>式
より運 動 方 程 式は次式とな る。 Mdi=−
tAn・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(6−
1) こ こ に,
M=diag
(mt )。
前 章と同 様に,
次 式は成 立して いる と す る。 n=
[1』−
AA−
]β・
…・
…・
・
……・
・
…………・
…
(6−
2) 乏= 【ln−
A−
A]d ・
…・
…・
………・
…・
.
…・
・
(6−
3) (6−
1)式の両 辺に 鴇 を左か ら掛 ける と t±MX=−
titzln・
9・
P鹽
9・
;・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(6−
4) 上式の左辺は,
t ・M・
一
議
.
[
毒
・ 燃]
・ ナ…・
…・
一 一
(6−
・) とな る。T
は運 動エ ネル ギー
で ある。
T
を用いる とT =一
鴇4
肥…・
………・
…………・
…・
……
(6−6
)t=0
で静 止し てい る構造が微 小外乱 に よ り 運動エ ネ ル ギー
T(O
)を 得たとする。
この とき,
T(t
)−
T(0
)<0 ・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
r・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
(6−7
> が成 立 する場 合には,運 動エ ネルギー
が減る か ら, (6−7
) 式は安 定 条 件 となる。T
{t
)を展 開す る と,
T
ω一
T〔0
)−
T
(O
)t
+a
T
(e
}t
・ +…・
・
…・
…
(6−8
)一
ヒ式に おい て,
右 辺の第 1項T
(0
)は,
(6−6
)式に お け る n が (3−
16 )式か ら得られ た (6−
2)式で あ ること よ り零 となる。
よっ て, (6−
7)式の安 定の十 分条件は次式 と な る。
テ(
0
)〈0 ・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
−t…
t・
・
・
…
一・
(6−
9) (6−
6)式 を tで微 分する と τ=一
,元tAn
−
titAn−
tabtAh・
・
・
・
・
・
・
・
・
・
・
…
(6−10
)i ,
n はそれぞれ剛 体 変 位および自 己 応 力であるか ら,
(3−
6>お よ び (3−
16 )式を満足し て い る。
よ っ て,
上 式 は,
T
(0
)=言一
tittln−・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一・
・
・
・
・
…
(6−
11) と な り,
(6−9
)式の安 定の 十分条件は すべ て の可 能な変 位 速 度に対し,
次 式 が成立 す るこ とである。
t±tAn >O−一…
t’
・
・
・
・
・
・
・
・
・
・
・
…
t・
・
・
・
…
tt・
・
・
・
・
・
…
(6−
12) (2−
23), (6−
3) 式 を 代入 す る と,
t [ln− A −A
]=
[ln− A −A
] である ことによ りta [ln
−
A−
A
]φ
>0 ・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
∴
・
・
・
・
・
・
・
…
(
6−13
) さら に,
(5−
6)式 を 用い ると,の
tδ’α
>0・
・
・
・
・
・
…
一・
・
・
・
・
・
・
・
・
…
tt・
・
・
・
・
・
・
・
・
・
・
・
・
…
−t
(6−
14> あ るい は,
(6−
12)式に (2−
12),
(6−
2>式 を代入 する と’
ε
φ
[lm−
AA’
]β>0…・
………
(6−
15) と な り, さ らに, (4−
5〕,
(4−6
)式 よ り得ら れ る1
β を代 入すると゜〜 ββ蕈 ε β〜β>0
・
…………・
・
…・
・
……・
…・
…・
(6−16
>一
39
一
と なる。 結 局
,
安 定の十 分 条 件は すべ て の可 能な変位速 度に対 し,
(6−
14) 式ま た は (6−
16) 式が成 立する こと である。
4節で述べ た よ うに,
有 限 変 位 速 度が一
つ で も存 在す れ ば,
(4−
9 )式が成 立す る か ら安 定で は な い。 また,
5 節で述べ た よ うに,
幾何 剛 性が零の成 分を もつ 場 合に は,
(5−8
)式が成立 す る か ら安 定では ない。 したがっ て,
安 定の必 要 条 件は 「有 限 変 位 速 度が存 在し ない こと」およ び 「幾 何 剛 性が零成分を も た ない こと」である。
こ こ で,
必 要 条 件を満 足 する剛体 トラ ス構 造に 自己 応 力 を導 入 する方 法とそれ が十 分 条 件 を満 足 する かど うか を検 討する方 法を付け く わ え て お く。
(6−
12)式か ら (6−
14),
(6−
16) 式を誘 導し た過 程で判 るよ うに,
tdia
=
ε β7
β・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
tt…
t−・
・
・
・
・
・
・
…
(6
−
17) であ る。 最 初に,
右辺の形を利 用して 自己応 力の導入 を 考えて み る。 (4−
5),
〔4−
6) 式より[lm−
AA−
]が対 称で ある こと を考 慮すると噸μβ
=
’φ
[lm−
AA−
]β・
・
……・
…………・
…・
(6−
18) [lm− AA −
]のな かで零の行と列ベ ク トルを除い たもの を c とす ると噸ββ
;
εφ
cβ……・
…・
………・
・
…・
……・
・
・
…
(6−
19) こ こ に,
9φ
は [lm−
AA−
]の 0で な い行ベ ク トル に対 応 す るものである。
E
,。β
一
[CL, c、,_
,。m]E
・ −lc
、β1+。 zB、+_
βm 十 Cnβml’
’
’
”鹽
’
一’
’
”・
・
・
・
・
・
・
・
・
・
・
・
・
・
・
…
一・
…
(6−
20 ) と お く と,
Ctの成 分 が 同 符 号 を もつ な らβ‘の符号を調 整 し てすべ て の e峨 を正にす ること がで き る。 (2−
13) 式で わか る よ うにφ
の成分 は0
で ない α に対して常に 正で ある か ら,
eψ
cβ>0 と す るこ と がで き,
(6−
19>式 よりε’ ρβ
=
t β’
i
β>0…・
・
…・
…・
・
…・
・
……・
…・
…・
・
(6−
21 ) と な る βの導入 が可 能である。
す な わ ち,
[lm−
AA−
]の 0でない列の成分 が 同符 号 をもつ な ら安 定に な る よ うな 自己応 力 ρ)導入 が必 ず可 能である。
次に (6−17
)式の左辺の 形で考え る。.
(5−
6) 式 より fa は d‘の線 形 結 合で表さ れ る か ら,
(6−
21 )式の 多 項 式はすべ て の項がd
‘につ い て2
次,
β∫につ い て 1次で ある。 変 位 速 度δ‘キ0
かっ , 他の すべ ての 変位速 度 函=
0 (j
キi
)に対して,
(6−
17)式の左辺 は 箔’α= 鹹1
β丿 (h
は定 数 )………・
(6−
22> の形と な る。
し たがっ て,
すべ ての 独 立し たb
‘に対し てhdi
β∫が正と な る よ うに β,を 与えた後,
すべ て の 鰍 ‘=1−
p )の組み合わ せ につ い て (6−
14) 式が成 立ず る か ど う か を 調べ れ ば よい。
この こ とは,
fα
一
・
Kdi
β)6 と一 40 −.
.
表 示し たとき (5節 参 照 ), ‘dfa =
taK 。(β)i
である か ら,
K
,(β)が正 定 値 符 号で ある か どうか を調べ る ことを意 味 し てい る。
7.
具 体 例 3種 類の不 安 定 トラス構 造を利 用し,
有 限 剛 体 変 位や 自 己応 力による安 定 化などの具 体 例を 述べ る。
7.
1 自己応 力によ り安 定 化さ れ る不 安 定 トラス 図・
7−1
の ト ラス構造を考え る。 こ の トラスは,
部材 − −4
t
,3
2
re 寸.
創 O口
XL 。 図・
7−
1 不安定 ト ラス モデル (1)〉
,
一
汰
》
く一
一
「
L冖
一
▽『
ー
ー …N
リ ノ吠
Y
( 「 「 −>
−1
了
>
2
/ \ }/
\ 3 く (…
“
F
1ト
ー一
◎一
一
▽
(5)《
.
>
i
.
一
:・
一
1
>
,
一
一
一
▽旧
…1
’ 図・
7−
2 剛 体 変 位モー
ド数 :m = 8 , 全 自 由度 数 :n= 12