修士学位論文
精密農業高度化のための小型無人航空機を用いた
正規化植生指数マップ作成
2014 年 3 月 北海道工業大学大学院 工学研究科 機械システム工学専攻 亀 井 卓 也目 次
第
1
章
序論
2
1.1 精密農業 . . . . 3 1.2 研究目的 . . . . 4第
2
章
システム概要
5
2.1 小型無人航空機 . . . . 6 2.2 搭載用マルチスペクトルカメラ . . . . 8第
3
章
事前地上試験
12
3.1 地上撮影試験 . . . 13第
4
章
空中撮影試験
15
4.1 NDVI 彩色図作成 . . . . 16 4.2 NDVI 彩色図の航空写真への重ね合わせ . . . . 16第
5
章
結論
20
補遺 22 謝辞 29 参考文献 29第
1
章
第
1
章 序論
1.1
精密農業
精密農業とは,1990 年代に登場した農場の新たな管理戦略の総称である.例えば,農作物の 生育データを基にしたばらつき管理,収量や品質の向上,及び農薬散布量管理による環境負荷 の軽減などが達成されている [1].主にアメリカでは,生産性向上を目的とした大規模営農に対 する精密農業が実施されており,普及レベルは世界一である.対して欧州地域では,環境保全 を第一義的目的とし,特にドイツ・イギリス・デンマーク・フランスで積極的に精密農業が導 入されている.翻って日本国内では,欧米に遅れをとってはいるものの,これまで農家が主に 目視で行ってきた農作物の生育判断を定量データに基づいた方法に転換すべく,日本型精密農 業を実現しようと近年農林水産省を中心に技術開発が進められつつある [2].開発内容は 4 つに 大別され,1) 観察ツール (フィールドサーバや人工衛星リモートセンシングを利用した農作物 の生育状況把握システム),2) 制御ツール (肥料投入量の適所への自動調整作業システム),3) 収穫ツール (米の収量や籾の水分の自動測定可能な収量コンバイン),4) 解析ツール (収量等を マップにより可視化し,営農計画に活用可能な情報解析ツール),とまとめられる.本研究では, 機械分野からの日本型精密農業の高度化を目指し,1) 観察ツールおよび 4) 解析ツールに焦点 を絞る. 農作物の生育判断基準のための代表的定量データと,して植生の分布状況や活性度を表す正 規化植生指数 (NDVI; Normalized Difference Vegetation Index) が利用されている [7].NDVI は 植物による光の反射特性を用いるため,狭義のリモートセンシング,すなわち人工衛星や航空 機を用いた空中撮影により観測データを取得,NDVI に変換して活用される.人工衛星による リモートセンシングは広域かつ同一地点の観測データを繰り返し収集でき,地上の植生の移り 変わりを詳細かつ長期に渡り観測できる.しかし,人工衛星による観測では,1) 軌道条件の制 約により任意の時刻・場所が撮影不可能である,2) 雲の影響を受ける,3) データ価格が高額で ある,という不便さも併せ持つ.実際,安価な運用を選択しても,新規撮影時の最小注文面積 は 25[km2] で,写った雲の量で変動はするものの,価格は 50 万円程度である [3].日本国内で大 規模農業の盛んな北海道であっても,農家一件あたりの平均耕地面積がその 1%程度 [4] である ことを考えると,この最低注文面積に関する欠点は人工衛星利用を妨げる大きな要因であるが, 一方で,これら問題点の多くは航空機によるデータの補間で解決でき,実運用も行われている. しかし,有人航空機を運用する場合,航空法による対地高度 250[m] 制限を受け [5],人件費や 機体維持費が掛かり,発着場所の確保も必要である.そのため,リモートセンシング分野では 無人航空機 (UAV; Unmanned Aerial Vehicle) が積極的に利用されている.農業利用にのみ目 を向ければ,アメリカでは放牧地監視 UAV や作物監視 UAV が既に運用されている [8, 9].ま た,オーストラリアでは葡萄園のマッピングを目的とした研究開発が進められている [10, 11]. さらに,欧州では,イギリス [12]・イタリア [13]・セルビア [14]・スイス [15] などで,精密農業 に柔軟に対応するための小型 UAV(sUAV; small-type UAV) 運用に関する研究開発が進められ,スペインでは sUAV から得られたマルチスペクトル画像に熱測定を合わせ込む研究なども行わ れている状況である [16].それに対して日本国内に目を向ければ,東京大学 [17, 18] や北海道大 学 [19, 20] で無人航空機による NDVI マッピングが行われている.2012 年からはヤンマーヘリ &アグリ株式会社が商業利用を開始し,約 200 機の無人ヘリコプタを使用した農地データベー ス化が進みつつある [6].機体や搭載カメラの規模を比較すると,近年はカメラの小型化傾向が 確認される一方,機体自体の小型化はあまり考えられていない.そのため,操縦技術の習得や 維持管理には相応の労力を要するものと推測される.
1.2
研究目的
本研究では,より簡易な運用を目指し,市販のホビー用模型飛行機による運用を前提とした NDVI 導出用小型マルチスペクトルカメラを開発し,実機に搭載した空中撮影試験を通じ,取 得データから NDVI マップ作成と地上写真への埋め込みを実施し,実用性を確認することを目 的とする.これにより,日本型精密農業普及へ貢献可能な低コスト観測システム構築の足がか りを目指す. 4第
2
章
第
2
章 システム概要
2.1
小型無人航空機
本研究では,sUAV として,市販のラジコン機を基にカメラ搭載のための改造を施した機体 を使用する.本試験に使用した 2 機体を図 2.1 に示す.1 機目は Seduction-100(株式会社 OK 模 型),2 機目はエルロン搭載型 Prairie(ムサシノ模型飛行機研究所) の各改造機である.なお,選 択された上記 sUAV はエンジン搭載型模型飛行機としては最小クラスである 09-10 クラス (排気 量 0.09-0.10[in3]) 相当でのため,同等クラス以上の電動模型飛行機を使用した場合でも,開発 カメラが搭載可能ならば撮影が可能である.表 2.1 に機体諸元を示す.表に示すペイロード重 量の数値は,搭載カメラ重量を想定した模擬ペイロード搭載による試験値であり,限界値では ない.また,重量は様々なオプションパーツを取り付けた際の,運用時に於ける機体の最大値 を示す.なお,当初の計画では,Seduction-100 を使用し続ける予定であったが,予備試験の段 階で墜落,全損したため,原因と対策を議論し,試験に対する扱い易さを勘案し,それ以降の 試験では Prairie に使用機体を変更した.Seduction-100 は図 2.1(a) 左下に示すように,アウト テイク部をカメラマウントへ変更,制御回路搭載のためキャノピ部の装着方法をマジックテー プとし,機材搭載用パレットをコクピットに追加した.一方,Prairie は,機体下部への機器搭 載を前提とした改造が施された.機器搭載用スペースとして,機体下部へのカーゴスペースの 追加,開口部を補うための機体構造の補強が加えられている.また,機体重量増加に起因する 離着陸滑走距離増加に対応するため,翼根付近から翼端付近まで付されたエルロンを半分に切 断し,内翼側にサーボモータを追加することでフラップへ変更した.加えて,主翼翼根部の強 度増加のため,主翼の胴体への固定方法をゴム止め方式からネジ止め方式へ変更,さらに,推 力増加のため,プロペラおよびモータの大型化が施されている.マルチスペクトルカメラ搭載 による重心の変化に対しては,カメラ用バッテリ搭載位置の調整とコントローラ側のトリム調 整で対応し,形状変化に対しては,図 2.1(b) 右下に示すように,空気抵抗軽減を目的とした発 泡スチロール製カバーの追加を行った.また,両機体に共通する問題として,低温環境におけ るリチウムポリマバッテリの性能低下に対する対策,冬季間の離着陸手段の確保,飛行中の機 体情報の取得の必要性が確認された.バッテリの低温環境対策には,保温のため飛行試験前に バッテリを市販の懐炉で予熱することで解決できることが確認された.また,冬期間の離着陸 については,脚部をスキーに変更することで解決された. 表 2.1: 試験使用機体諸元 機体名 スパン長 全長 重量 ペイロード [mm] [mm] [g] [g] Seduction-100 1,000 980 970 200 Prairie 1,180 880 1,027 300 6(a)
(b)
図 2.2: 植物の反射スペクトル.赤の彩色領域が可視赤色域 (VIR) を,灰の彩色領域が近赤外 域 (NIR) をそれぞれ示す.
2.2
搭載用マルチスペクトルカメラ
NDVI は,図 2.2 の実線が示す葉緑素の吸収帯である赤色域で反射率が弱く,近赤外域での 反射率が強いという植物体の光物性を利用した植生指数であり,植物細胞が活性化している場 合に高い値を示す特徴を持つ.NDVI 値 VNDVIは式 (2.1) で求めることができる. VNDVI= VNIR− VVIR VNIR+ VVIR (2.1) ただし,VVIRは可視赤色域 (VIsible Red) の,VNIRは近赤外域 (Near InfraRed) の,それぞれ反射率観測値を表す.実際の変換では,RGB で撮影した画像は色毎に分割され,赤色域の画像の みが選択され,近赤外域の画像と重ね合わされることで,各ピクセルに上記の NDVI 化処理が 施される.本研究では,sUAV にも搭載可能な大きさであるため MOSWELL 社製 CCD(Charge-Coupled Device) ボードカメラから,カラー撮影用の MS-94KR とモノクロ撮影用の MS-94LR を図 2.3 のように組み合わせることで NDVI マップ作成用に使用した.今回は NDVI マップ作成 のみを目的とした必要最小限のデータ取得を目的とするため,搭載機材簡便化を図るべく,撮 影するデータは赤色域と近赤外域での 2 バンドのみとした.カラーカメラによる赤色光取得の ため,波長 640[nm] 以下の光を遮断するフィルタを装着し,カメラ内蔵の赤外遮断フィルタを 組み合わせた.モノクロカメラによる赤外光の取得には波長 760[nm] 以上の光を遮断するロン 8
グパスフィルタのみを装着し,NDVI 算出に必要な近赤外線のみを透過させた.また,900[nm] 以上の波長の光は,カメラの感度が低下する特性を持つため,誤差として扱った.完成した動 作回路およびカメラは,図 2.3(a) に示すようにバルサ材製ケースに格納され,Prairie 下部の カーゴスペースに搭載された.図 2.3(b) に開発カメラのブロック図を示す.カメラではデータバ ス,垂直同期信号,水平同期信号,およびピクセルクロックの各データが常に CPLD(Complex Programmable Logic Device) に出力されているが,カメラ間は同期されていない.このため, 2 台のカメラから出力されるデータバスとピクセルクロックとを同時に切り替え,RGB カメラ, 近赤外域カメラの各データを 1 枚撮影するごとに SRAM(Static Random Access Memory) へ順 次格納する構造とした.また,画像一枚分のデータ量が決まっており,データバスとピクセル クロックから画像を構成できるため,垂直同期信号および水平同期信号の通信は実施しなかっ た.さらに,2 台のカメラのデータを CPLD 1 枚で受信することで SRAM を共有することが できるため,基板の実装面積や消費電力,設計の簡略化,重量の軽減を図っているが,その一 方で,データの同時取得ができない構造となっている.SRAM 保存後は低速で PIC(Peripheral Interface Controller) がデータの同期を取りつつ SRAM からの吸出と SD カードへの記録を担 い,作業が繰り返される. SD カードへの記録は実測で凡そ 20 秒掛かり,この値が画像の最速 撮影時間となる.この撮影時間は,プログラム側で制御が可能であるが,最短での書き込み時 間は SD カード内の書き込みセクタの状態によって左右されるが,事前の撮影試験では 22 秒程 で撮影できることを確認した.なお,完成したカメラの重量は 193[g] となり,表 2.2 に示す通 り,調査した範囲では世界最軽量の NDVI マップ作成用カメラが実現している.
(a)
(b)
図 2.3: 開発したマルチスペクトルカメラ.(a) ケースに収納されたカメラ実機と周辺機器,(b)
表 2.2: 公表されている各国研究機関のカメラおよび機体重量 研究機関 機体形式 発表年 重量 [g] 備考 カメラ 機体 東京大学 (日本 )[17] 固定翼機 2005 1,000 2,000 デジカメ × 2 北海道大学 (日本 )[19] ヘリコプタ 2005 1,620 63,000 DuncanT ec h MS2100 Univ ersit y of Applied Sciences and Arts (スイス )[12] ヘリコプタ 2006 1,170 6,000 R GB770 [g] , NIR400[g] 東京大学 (日本 )[18] ヘリコプタ 2008 2,000 3,300,000 (R GB , NIR) × 2 Ab eryst wyth Univ ersit y (英国 )[13] 固定翼機 2008 1,470 2,700 Univ ersit y of Applied Sciences and Arts (スイス )[12] クアッドコプタ 2008 350 900 R GB のみ Institute for Sustainable Agriculture (スペイン )[16] ヘリ + 固定翼機 2009 2,700 6,200 6 バンド Univ ersit y of No vi Sad (セルビア )[14] パラグライダ 2009 470 5,600 MCA Univ ersit y of No vi Sad (セルビア )[14] パラグライダ 2009 420 5,600 ADC m ultisp ecral camera USD A-Agricultural Researc h Service (米国 )[8] 固定翼機 2010 1,240 10,000 FinePix S3PR O UVIR Univ ersit y of T asmania (豪州 )[10] オクトコプタ 2011 531 2,500 Canon 550D digital SLR The Univ ersit y of Queensland (豪州 )[11] 固定翼機 2012 708 3,900 (カメラ ,レンズ ) × 2 Consiglio Nazionale delle Ricerc he (イタリア )[15] ヘキサコプタ 2012 200 2,500 ADC-lite( バッテリ無し ) Univ ersit y of T asmania (豪州 )[10] ヘキサコプタ 2012 200 2,500 ADC-lite( バッテリ無し ) 北海道工業大学 (日本 ) 固定翼機 2013 193 1,027 4 バンド ,バッテリ内蔵
第
3
章
第
3
章 事前地上試験
3.1
地上撮影試験
空中撮影を行う事前試験として,開発したマルチスペクトルカメラによる撮影を地上に於い て実施した.撮影間隔は撮影タイミングの管理のし易さから 30 秒に設定し,画像明度はフィ ルタ枚数の増減と PC ディスプレイへの出力で調整した.マルチスペクトルカメラの画像処理 に対する動作確認内容を図 3.1 を用いて説明する.マルチスペクトルカメラで赤色域画像は図 3.1(a) のように,また,近赤外域画像は図 3.1(b) のように撮影される.NDVI 算出には 2 色のス ペクトル比較が必要なため,図 3.1(c) に示すような,赤色を緑,近赤外を赤に割り当てた中間 処理用合成画像が作成される.図 3.1(c) 合成時の画像のずれの修正は,目視による特徴点の一 致のみで実施された.これらを用いて,作成された最終的な NDVI 値 VNDVI彩色図を図 3.1(d) に示す.比較のため,図 3.1(e) に同一地点の RGB 画像を示す.図 3.1(d) は色が赤い程,光合 成が活発に行われていることを,逆に暗ければ光合成が行われていないことを示している.図 3.1(d) と (e) を比較すると,図手前側の NDVI 値が低い場所は土の露出した場所であるため,ま た,図上側の NDVI 値が低い場所は空であるため,どちらも光合成が行われる余地のない場所 であり,事実と一致する.それに対して,NDVI 値の高い場所は草木の生い茂っている状況が 確認でき,これも事実と相違ないことが確認される.以上の比較により,開発したマルチスペ クトルカメラが NDVI を用いた植生解析に有効に機能することが確認できる.(a) (b) (c) (d) (e) 図 3.1: 地上試験撮影により作成された NDVI 画像,およびそれに付随した画像群.(a) 可視赤 色域画像,(b) 近赤外域画像,(c) 中間処理用合成画像,(d) NDVI 彩色図,(e) 同一地点の RGB 画像. 14
第
4
章
第
4
章 空中撮影試験
4.1
NDVI
彩色図作成
実運用を目指し,開発したマルチスペクトルカメラ搭載 sUAV を用いて空中撮影を行い,凡 そ 20 カ所の画像データを成功裏に取得した.獲得した全データに対して NDVI 彩色図を作成し たが,そのうちの 1 カ所を代表の空中撮影結果として以下にまとめる.図 4.1 に,撮影した画 像と作成された NDVI 彩色図および比較検討のための画像群を示す.この撮影画像は,試験前 に設定した試験区域内を広範囲に捉えた画像の一つであるため,空中撮影で一般に問題となる 地形照合に特に適していることから選択された.地上撮影試験と同様,赤色域と近赤外域の画 像を上空で綺麗に取得できていることが図 4.1(a),(b) から確認でき,それらを用いて図 4.1(c) に示す NDVI 彩色図が作成された.地形照合のため,本研究では図 4.1(d) に示す,撮影地点近 傍の GoogleEarth 航空写真が用いられる.図 4.1(c) と (d) はサッカー場,ソフトボール場,お よびテニスコート等の配置が一致しており,近隣地区に同様の地点が存在しないことから,同 一地点であると判断された. さらに,図 4.1(c) の NDVI 値 VNDVIの精度検証のため図 4.1(c) と (d) が比較されたが,本論 文では特に特徴的な 3 地点を取り上げ検証結果とする.3 地点は図 4.1(c),(d) 内に記載された A,B,および C 地点であり,各々の特徴は,A) GoogleEarth 航空写真で植生の確認ができる にも係わらず,NDVI 値の低い地点,B) GoogleEarth 航空写真では植生の分布が一様であるに も係わらず,NDVI 値が一様でなく帯状の高い領域を示す地点,C) 植物と緑色の人工物の比較 が可能な地点,である.3 地点の地上画像を図 4.1(e),(f),(g) にそれぞれ示す.先ず,A 地点 の地上画像では紅葉を終えつつある銀杏の葉が確認できる.つまり,図 4.1(c) と (d) とでは撮 影季節にタイムラグがあるため,GoogleEarth 航空写真上では緑が生い茂っているが,NDVI 画像を作成した時点では紅葉終盤の時期であったため NDVI 値は低くなることから,正確な値 が彩色されていることになる.次に,B 地点はフェンス近辺の草だけ踏み荒らされなかったた め,フェンスに沿って活性度の高い草が生い茂っている様子が確認できる.GoogleEarth 航空 写真では一様に生えているように見える草地も,NDVI 画像は通常の航空写真では判り難い草 の活性度を正確に提示していることが確認できる.最後の C 地点は,草木と同種の緑色をした 大型フェンスが存在している.航空写真では草木と同様の緑色にしか見えないが,NDVI 値は 黒,すなわち光合成が行われていないことを確かに示しており,色に因る NDVI 値解析の誤謬 は発生していないことが確認できる.以上より,作成した NDVI 彩色図は,実際の環境に一致 しており,NDVI が高精度で解析,可視化されていることが示された.4.2
NDVI
彩色図の航空写真への重ね合わせ
精密農業従事者への一般的な提示方法であるため,取得した NDVI 彩色図を航空写真に重ね 合わせる処理を行った.図 4.2 図に重ね合わせた一例を示す.今回は 3 点の特徴点を目視確認 16(a) (b)
(c)
(d)
(e) (f) (g)
図 4.1: 空中撮影試験から作成された NDVI 彩色図と確認画像群.(a) 可視赤色域画像,(b) 近 赤外域画像,(c) 作成された NDVI 彩色図,(d) 撮影地点近傍の GoogleEarth 航空写真,(e) 図 (c),(d) に於ける A 地点の地上 RGB 画像,(f) 図 (c),(d) に於ける B 地点の地上 RGB 画像, (g) 図 (c),(d) に於ける C 地点の地上 RGB 画像.
による手動作業で重ね合わせるため,特徴的な地形が撮影されている狭域画像が選択された. 撮影時期が違うため,樹木の生育状況に違いはあるものの,路面やフェンス,あるいは樹木密 集地の境界線が一致していることから同一地点であることが確認できる.このことから撮影画 像から作成した NDVI マップを RGB 画像データに埋め込むことができ,可視化した NDVI 画 像が有効に利用できることが確認できる.なお,今回は一連の作業を手動で行ったが,今後は NDVI 画像の地面に対して水平を取るための角度補正,特徴点抽出,および重ね合わせの各作 業の自動処理環境を整備すべく,GPS(Global Positioning System) の機体への搭載による飛行 データの取得や画像処理ソフトウェアの開発を進める必要がある.
(a)
(b)
図 4.2: 特徴的地形を有した地点に於ける画像の重ね合わせ.(a) NDVI 彩色図,(b) 航空写真 への重ね合わせ画像.
第
5
章
第
5
章 結論
本研究では,精密農業高度化のため,より簡便に,より低コストで運用が可能な,小型無人 航空機を利用した正規化植生指数マップを作成する環境を構築し,空中撮影試験を実践した. その結果,エンジン搭載型模型飛行機としては最小クラスの小型無人航空機に搭載可能なマル チスペクトルカメラを開発し,正規化植生指数マップ作成に必要な赤色域と近赤外域の撮影が 可能であること,実際に獲得した画像データから簡便に正規化植生指数マップを可視化可能で あること,さらに空中撮影を行い,可視化結果と実環境との間に相関があり,航空写真よりも 正確な植物活性度を提示可能であることあることを明らかにした.なお,開発したマルチスペ クトルカメラは現状世界最軽量であり,機体や操縦者の選択に対する自由度の向上,あるいは 撮影地点への移動,不使用時の保管,といった各種運用面での優位性がある.運用環境の更な る整備を行い,より効率的な日本型精密農業を実現する.補遺
A.1 sUAV
の管理
本研究では,機械分野からの日本型精密農業の高度化を目指し,1) 観察ツール及び 4) 解析 ツールに焦点を絞り,狭義のリモートセンシングで使用される人工衛星や有人航空機で取得し た画像データの簡易補間を目的とし,sUAV を用いた空中撮影実験を行なっている.しかし現 段階では,機体の位置情報は操縦者の目視のみで運用されており,定量的な管理は行われてお らず,画像データが撮影された地点の特定が難しい,sUAV の行動範囲に制限が発生している といった問題がある.そこで本研究では,撮影地点の定量的な位置座標管理を目指し,sUAV に全地球測位システム (GPS; Global Positioning System) と無線通信機を搭載し,リアルタイ ムで PC 上にて情報を表示及び記録し,撮影支援と行うと同時に,今後予定する目視外飛行を 達成するための管理システムの開発が必要である.A.2
システム
A.2.1
搭載機器
sUAV による取得データを管理サポートするため航法情報のリアルタイム取得を目的とした ことから,GPS 受信機,無線通信機,レベル変換 IC,及び電源回路を搭載した.GPS 受信機 は追加機材無しで 2 次元方向で 3m,高度方向で 7m 以内の測位誤差が保証されており,最大 6G までの加速度に耐えられる耐久性を持つことから Garmin 製 GPS18 LVC を選択した.また, GPS による測位は受信時に上空に障害物が無い状態が条件なことから,設置位置は胴体上部 とし,モータからの放射ノイズを避けるために GPS の信号線にアルミテープによる被覆を施 しシールドとした.無線通信機は IEEE が定める IEEE 802.1.5.4 として規格されている ZigBee 規格の通信機であり,無線従事者の免許や申請が必要なく,無線モジュール間での見通し距離 1km の通信距離を持つことから Digi 製 XBeePRO S2B とした. 通信は地上局に向けて送信す るため sUAV 下部カーゴスペースへの搭載とし,その際,Plairie の表面フィルムが電波を遮断 することから防水用の表面ニス塗装のみを施したバルサ材製ケースへと格納した.図 A.1(a) に 搭載回路を示す.GPS 受信機と無線通信機間のケーブルは Plairie 内部を機体上下方向に通さ れる.電源は,オーム電機製 ecoruba ニッケル水素充電池 4 本を使用し,GPS 受信機用の 5V, 無線通信機用の 3.3V の 2 系統を三端子レギュレータより生成している.また,GPS18LVC の 信号は 0∼供給電源電圧の間で行われ電源電圧は 4.0∼5.0VDC であり,XBeePRO S2B の信号 は 3.3V CMOS UART であることから,レベル変換 IC により通信レベルを変換している. 22A.2.2
地上局
sUAV を管理する地上局は,通信回路を接続した PC とした.図 A.1(b) に地上局側の通信回 路を示す.通信回路は無線通信機と USB-シリアル変換モジュールで構成され,sUAV より送 られる通信データは USB 通信規格で PC に送信される.管理ソフトは C# で開発し,sUAV より送信される信号のうち,NMEA(米国海洋電子機器協会) が定める NMEA 0183 規格か ら GGA(Global Positioning System Fix Data) 及び,RMC(Recommended Minimum Specific GPS/Transit Data) を抽出する.GGA,RMC の内容に含まれる緯度,経度,高度,対地速度, 方位角の情報を元に,ソフトウェア上に UAV の位置・航法情報を表示し,PC 内にログを保存 する.図 A.2 に開発したソフトの GUI(Graphical User Interface) 例を示す.機体の位置や方位 角が赤い矢印として表示され sUAV の状態を直感的に確認することが可能である.
(a)
(b)
図 A.1: 開発した GPS 系回路.(a) UAV 搭載用回路,(b) 地上局用回路.
図
A.2:
図 A.3: 通信距離確認試験
A.3
事前地上試験
A.3.1
通信距離確認試験
飛行実験の事前実験として,開発した搭載機器による位置情報取得と通信試験を地上におい て実施した.その結果,GPS 受信機が安定して信号の受信が行えるまで電源投入後 3 分ほど要 すること,さらに,取得データに断続的な未取得が発生することがわかった.これは実験が北 海道工業大学建物内で行われたために GPS 衛星からの電波が壁面に遮断され正確な衛星捕捉 ができなかったこと,及び,無線通信機は直進性の高い周波数帯を用いているため,通信機間 に遮蔽物がある場合は通信ができないことが原因であることが判明した.そのため,図 A.3 に 示す二基の橋の間で見通し距離 1km を確保し,再度試験を行ったところ,通信が可能であるこ とが確認された.これにより開発した搭載機器が有効に機能すると確認された.A.3.2
周波数干渉試験
飛行前の事前試験として,sUAV の操縦や通信に関わる電波の相互干渉試験を地上において 実施した.電波干渉は周波数の比が整数である場合に発生することから,sUAV のモータノイ ズをスペクトラムアナライザを用いて測定し,各機器の使用周波数との比較を行った.表 A.1 に既知の使用周波数と実際に測定した sUAV のモータノイズを示す.測定の結果,各機器が使 用する周波数とモータノイズすべての周波数間で整数比となっていないことが確認された.こ れにより sUAV の搭載機器は互いに電波干渉が発生しないことが確認された. 26表 A.1: 使用する電波の周波数 用途 周波数 (MHz) X-Bee 通信周波数 2400 GPS 通信周波数 1575.42 操縦用周波数 72.19 測定モータノイズ 2450
A.4
飛行試験
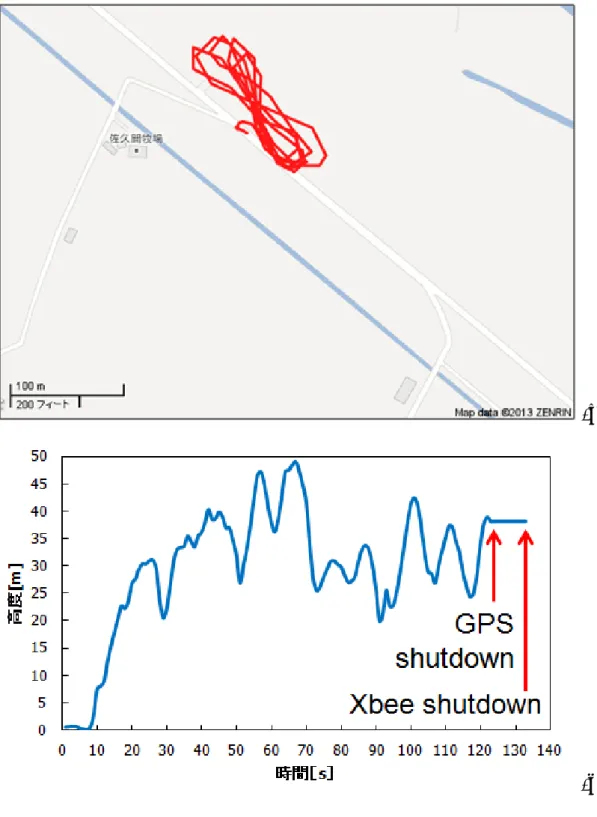
実運用を目指し,開発した機器搭載機 sUAV を用いて 8 分間の飛行試験を行い,飛行中のロ グを成功裏に取得した.飛行試験は本システム実証を目的としていたため,飛行高度は 50m 程 度の低空を飛行させることとした.取得したデータからの飛行経路と飛行高度を図 A.4 に示す. sUAV が離陸し小旋回した後,8 の字を描く経路が記録できている事が確認でき実際の飛行と 一致している.また飛行高度から,離陸は記録開始から 8 秒後であることも確認できる.初期 高度が 0m となっていないのは,GPS データより海抜高度を取得しているためである.しかし ながら,データの取得は 137 秒時点で停止,高度データが 120 秒時点より一定となっているこ とも確認できる.GPS 受信機は測位が不可能になった場合,直前の測位データを繰り返し出力 する特性を持つため,120 秒時点で測位が不可能になったと考えられる. sUAV 着陸後の搭載機器の電源電圧を測定したところ,動作電圧を下回っていた.ecoruba Ni-MH 単三電池の動作保証温度が 0∼40 ℃であるのに対し,実験時の気温は-6 ℃であったこと から,この低温環境による電池の性能低下が,データ取得中断の原因であると考えられる.以上 により,冬期実験に際しては低温環境への耐性が高い電池への交換や,使い捨て懐炉で保温す るなど,電池消耗を回避する手立てを講じる必要があるが,本研究で目的とした位置情報デー タの取得が可能であると確認できる.A.5
結論
本研究では,小型無人航空機による空中撮影の補助のため,機体に全地球測位システムを搭 載し,リアルタイムで PC 上にて情報を表示,及び記録を行う環境を構築し,実際に飛行試験 を実践した.その結果,エンジン搭載型模型飛行機としては最小クラスの小型無人航空機に搭 載可能な位置情報発信機器を開発し,地上局より小型無人航空機の追跡が可能であることが確 認できた.今後は,空中撮影用の機材との統合を行い,撮影地点の同定の助けとすることを目 指す.また,さらなる各種センサを追加し,飛行中の姿勢情報の取得,PC からの遠隔操縦を 実現し,目視外飛行を実現する.(a)
(b)
図 A.4: 取得した GPS 位置座標.(a) 二次元座標,(b) 高度.
謝辞
本研究は,北海道工業大学大学院工学研究科 機械システム工学専攻 設計情報学研究室にお いて,北海道工業大学准教授 千葉一永 先生のご指導のもとに行われたものです.本論文を結 ぶにあたり,ご指導ならびにご鞭撻を賜りました北海道工業大学准教授 千葉一永 先生に心か ら深く感謝し,厚くお礼申し上げます.また本論文の主査,副査を引き受けて下さり,有益な ご意見とご検討を頂きました北海道工業大学 太田佳樹 先生,竹澤聡 先生, 島昭彦 先生に 厚く感謝の意を表します.本論文をまとめるに際し,北海道工業大学教授 佐鳥新 先生からは, 本論文に対する注意深いご検討と多くの有益なご教授を賜りました.ここに謹んで感謝申し上 げます.北海道衛星株式会社 竹内佑介 氏,日本宇宙少年団北海道ブロック長 藤島豊久 氏,札 幌アカシア模型クラブ 中原峻 氏には,本研究に対するご意見を頂き,そして多くの技術的な サポートをして頂きました.心から感謝いたします.北海道工業大学 佐鳥研究室 伊藤那知 氏, 太田 諭志氏には,日頃から研究遂行のためのご助言とご支援を頂きました.心から感謝いたし ます.北海道工業大学 設計情報学研究室の後輩である,菅井慎也 氏,齋藤慎之介 氏には研究 当初から助言を頂きました.心から感謝いたします.そして研究室の皆さんには日頃から研究 以外でも多くの場面で支えて頂き感謝いたします.参考文献
[1] 梅田幹雄: 海外における精密農業, 農林水産技術研究ジャーナル, 30, 5 (2007), pp. 40–44. [2] 農林水産省農林水産技術会議: 日本型精密農業を目指した技術開発, 農林水産研究開発レ ポート, 24 (2008), pp. 1–17. [3] 日 本 ス ペ ー ス イ メ ー ジ ン グ 株 式 会 社: available online at http://www.spaceimaging.co.jp/product-service/about-IKONOS/archive-or-collection/tabid/126/Default.aspx [retrieved 27 December 2012].[4] 農 林 水 産 省 農 地 に 関 す る 統 計: available online at
http://www.maff.go.jp/j/tokei/sihyo/data/10.html [retrieved 27 December 2012].
[5] 法 務 省 航 空 法 施 行 規 則: available online at
http://law.e-gov.go.jp/htmldata/S27/S27F03901000056.html [retrieved 8 May 2012].
[6] 日刊工業新聞 ヤンマー,全国の農地を DB 化-無人ヘリ活用し植生指数を収集・蓄積: avail-able online at http://www.nikkan.co.jp/news/nkx0120120308baaj.html [retrieved 8 March 2012].
[7] Lelong, C., Burger, P., Jubelin, G., Roux, B., Labbes, S., and Baret, F.: Assessment of Unmanned Aerial Vehicles Imagery for Quantitative Monitoring of Wheat Crop in Small Plots, Sensors, 8, 5 (2008), pp. 3557–3585.
[8] Hunt, E., Hively, W., Fujikawa, S., Linden, D., Daughtry, C., and McCarty, G.: Acquisition of NIR-green-blue Digital Photographs from Unmanned Aircraft for Crop Monitoring, Remote Sensing, 2010, 2 (2010), pp. 290–305.
[9] Laliberte, A., Herrick, J., Rango, A., and Winters, C.: Acquisition, Orthorectification, and Object-based Classification of Unmanned Aerial Vehicle (UAV) Imagery for Rangeland Monitoring, Photogrammetric Engineering and Remote Sensing, 76, 6 (2010), pp. 661– 672.
[10] Turner, D., Lucieer, A., and Watson, C.: Development of an Unmanned Aerial Vehi-cle (UAV) for Hyper Resolution Vineyard Mapping Based on Visible, Multispectral, and Thermal Imagery, Proceedings of 34th International Symposium on Remote Sensing of Environment, 2011.
[11] Lechner, A., Fletchera, A., Johansen, K., and Erskinea, P.: Characterising Upland Swamps Using Object-based Classification Methods and Hyper-spatial Resolution Imagery Derived
from an Unmanned Aerial Vehicle, International Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 1, 3 (2012), pp. 101–106.
[12] Nebiker, S., Annen, A., Scherrer, M., and Oesch, D.: A Light-weight Multispectral Sensor for Micro UAV-opportunities for Very High Resolution Airborne Remote Sensing, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXVII-B1, 2008, pp. 1193–1200.
[13] Gay, A., Stewart, T., Angel, R., Easey, M., Eves, A., Thomas, N., and Kemp, A.: Devel-oping Unmanned Aerial Vehicles for Local and Flexible Environmental and Agricultural Monitoring, Proceedings of the Remote Sensing and Photogrammetry Society 2009 An-nual Conference, 2009, pp. 471–476.
[14] Antic, B., Culibrk, D., Crnojevic, V., and Minic, V.: An Efficient UAV Based Remote Sensing Solution for Precision Farming, BioSense - The First International Workshop on ICT and Sensing Technologies in Agriculture, Forestry and Environment, 2009.
[15] Primicerio, J., di Gennaro, S., Fiorillo, E., Genesio, L., Lugato, E., Matese, A., and Vaccari, F.: A Flexible Unmanned Aerial Vehicle for Precision Agriculture, Precision Agriculture, 13, 4 (2012), pp. 517–523.
[16] Berni, J., Zarco-Tejada, P., Suarez, L., and Fereres, E.: Thermal and Narrowband Mul-tispectral Remote Sensing for Vegetation Monitoring from an Unmanned Aerial Vehicle, IEEE Transactions on Geoscience and Remote Sensing, 47, 3 (2009), pp. 722–738. [17] 鈴木真二: 大学における無人機の研究教育への活用, 航空と宇宙, 670 (2009), pp. 6–12. [18] Nagai, M., Chen, T., Ahmed, A., and Shibasaki, R.: UAV Borne Mapping by Multi
Sensor Integration, The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Vol. XXXVII-B1, 2008, pp. 1215–1221.
[19] 石井一暢, 杉浦 綾, 深川知久, 野口 伸, 柴田洋一: マルチスペクトルイメージングセンサを 用いた生育診断システムの構築 (第 1 報), 農業機械学会誌, 68, 2 (2006), pp. 33–41. [20] 半谷一晴, 石井一暢, 野口 伸: 衛星画像とヘリコプタ画像を利用した小麦の穂水分推定, 環
研究業績
学術誌
[1] Chiba, K., Kamei, T., Ito, T., Sugai, S., Ohta, S., and Satori, S. Generation of Normalized Difference Vegetation Index Map for Precision Agriculture Using Small-Type Unmanned Aerial Vehicle. Journal of Advanced Mechanical Design, Systems, and Manufacturing, in
review.
[2] 亀井 卓也, 伊藤 那知, 菅井 慎也, 太田 諭志, 佐鳥 新, 千葉 一永. 精密農業高度化のた めの小型無人航空機を用いた正規化植生指数マップ作成. 航空宇宙技術, Vol.12, 2013, pp.111-117.
国外発表
[1] Chiba, K., Kamei, T., Ito, T., Sugai, S., Ohta, S., and Satori, S. Generation of Normalized Difference Vegetation Index Map for Precision Agriculture Using Small-Type Unmanned Aerial Vehicle. AVIATION, AIAA Aviation and Aeronautics Forum and Exposition, Atlanta, Georgea, USA, June 2014.
[2] Kamei, T., Ito, T., Ohta, S., Satori, S., and Chiba, K. Mapping of Normalized Differ-ence Vegetation Index for Precision Agriculture by Small-Type Unmanned Aerial Vehicle. Asia-Pacific International Symposium on Aerospace Technology, APISAT, Takamatsu, Japan, November 2013.
国内発表
[1] 伊藤 那知, 太田 諭志, 亀井 卓也, 菅井 慎也, 佐鳥 新, 千葉 一永 CubeSat 搭載用マルチ スペクトルカメラの開発. 第 22 回スペース・エンジニアリング・コンファレンス, 東京, 2013 年 12 月 [2] 亀井 卓也, 高野 哲也, 千葉 一永 GPS を用いた小型無人航空機のリアルタイム管理. 日本 機械学会 設計工学・システム部門講演会, 沖縄, 2013 年 10 月. [3] 亀井 卓也, 伊藤 那知, 太田 諭志, 佐鳥 新, 千葉 一永小型無人航空機を用いた正規化植生 指数マッピング. 日本機械学会 設計工学・システム部門講演会, 沖縄, 2013 年 10 月. 32[4] 伊藤 那知, 太田 諭志, 亀井 卓也, 菅井 慎也, 佐鳥 新, 千葉 一永, 佐々木 正巳, 三橋 龍一 CubeSat 搭載用マルチスペクトルカメラの設計. 第 57 回宇宙科学技術連合講演会, 米子, 2013 年 10 月. [5] 亀井 卓也, 高野 哲也, 千葉 一永 GPS を使用した小型無人航空機のリアルタイム管理. 日 本機械学会 北海道支部講演会, 函館, 2013 年 9 月. [6] 亀井 卓也, 伊藤 那知, 太田 諭志, 佐鳥 新, 千葉 一永精密農業への利用を目指した小型無 人航空機による正規化植生指数マップ作成. 日本機械学会 北海道支部講演会, 函館, 2013 年 9 月. [7] 亀井 卓也, 伊藤 那知, 太田 諭志, 佐鳥 新, 千葉 一永小型無人航空機を用いた正規化植生 指数マップ作成. 日本航空宇宙学会年会講演会, 東京, 2013 年 4 月. [8] 高野 哲也, 亀井 卓也, 菅井 慎也, 千葉 一永 GPS を用いた小型無人航空機の管理システ ム. 第 10 回北海道宇宙科学技術創成センター学術講演会, 札幌, 2013 年 2 月. [9] 亀井 卓也, 伊藤 那知, 太田 諭志, 佐鳥 新, 千葉 一永小型無人航空機を用いた地表画像取 得. 第 10 回北海道宇宙科学技術創成センター学術講演会, 札幌, 2013 年 2 月. [10] 齋藤 慎之介, 伊藤 那知, 上山 善弘, 亀井 卓也, 佐鳥 新, 三橋 龍一, 千葉 一永北海道工業大 学の宇宙開発. University Space Engineering Consortium Workshop, 札幌, 2012 年 12 月. [11] 亀井 卓也, 伊藤 那知, 上山 善弘, 千葉 一永, 佐鳥 新小型無人航空機を用いた地表画像取