772
油 圧
と 空
気 圧
研
究
論文
非 対 称 シ リ ン ダ を有 す る電 気.油
圧 サ ー ボ シ ス テ ム のDSPに
よ る
ZPETCと
線 形 化 を用 い た 特 性 改 善 に 関 す る研 究*
鈴
木
勝
正**, 福
島
総 一 郎***
Improving
on the Electrohydraulic
Servo
System
with Nonsymmetrical
Cylinder
by ZPETC
and Linearization
Using
DSP
Katsumasa
SUZUKI,
Souichirou
FUKUSHIMA
A DSP (digital signal processor) and a feedforward compensation method called ZPETC (zero phase
er-ror tracking control) are applied to an electrohydraulic servo system with a nonsymmetrical cylinder to
improve on the frequency responses of the system. ZPETC is a control algorithm, rendering the transfer
function between the input and actual output close to unity. This algorithm assumes the controlled system
to be linear. However, the relationship between the input and flow rate at the servo valve is nonlinear.
Another nonlinear factor is added when the cylinder is nonsymmetrical. Therefore, these nonlinearities
should be removed. The nonlinearity of the servo valve is compensated for by using the detected load
pressure, and the effect of the nonsymmetrical cylinder is compensated for by using the detected sign of
the input. The DSP performs the calculations for ZPETC and for linearization. The effects of improving
the frequency responses of the system by this digital signal processing technique are investigated.
Keywords: Hydraulics, Electrohydraulic Servo System, Nonsymmetrical Cylinder, DSP, ZPETC,
Linearization
1 緒 論 電 気 油 圧 サ ー ボ シ ス テ ム は その パ ワー の大 き さ,速 応 性 を生 か して建 設 機 械 や 産 業 機 械 な ど多 くの分 野 で 利 用 され て お り,そ の精 度,高 速 応 答性,信 頼 性 へ の 要 求 が ます ます厳 し くな っ て きて い る.ま た近 年 の エ レ ク トロニ クス の発 展 に お い て,デ ィジ タ ル処 理 技 術 の高 速 化,高 精 度 化 は め ざ ま しい もの が あ り,単 な る ア ナ ロ グ技術 の置 き換 え に と ど ま らず そ の特 性 を生 か して 新 し い発 展 を見 せ て い る.そ こで 著 者 らは,電 気.油 圧 サ ー ボ シ ス テ ム に求 め られ る高 い性 能 を実 現 す るた め,高 速 デ ィ ジタ ル処 理 が可 能 なDSP(デ ィ ジ タル ・シ グナ ル ・プ ロ セ ッサ)を 導 入 し,ZPETC(ゼ ロ ・フ ェ イ ズ ・エ ラ ー.ト ラ ッキ ン グ ・コ ン トロー ル)1)と い う フ ィー ド ・フ ォ ワ ー ド式 の デ ィ ジ タ ル 制 御 アル ゴ リズ ム を利 用 して,シ ス テ ム全 体 の周 波 数 特 性 を改 善 す る こ とを 目的 として研 究 を進 め て い る.す で に,対 称 形 油 圧 シ リ ンダ を持 つ 位 置 制御 シ ス テム を 対 象 に して その 特 性 を改善 し良 好 な結 果 を得 て い る2). 本 論 文 で は,一 般 的 に使 用 され る油圧 シ リン ダの 多 くが非 対 称 す なわ ち シ リ ンダ両 側 の 受圧 面 積 が 等 し く な い構 造 に な って い る こ とを考 慮 し,非 対 称 形 油 圧 シ リ ン ダ を持 つ シ ス テム3)を対 象 に して そ の性 能 を向 上 させ る.こ れ は ロ ッ ドが片 側 に しか な い た め製 作 が 容 易 で あ る こ と,シ ー ル箇 所 が 少 な くて 済 む こ とに起 因 して 多 く用 い られ て い る.し か し,そ の た め特 性 が 移 動 方 向 に よ っ て異 な る非 線 形 と な る.と こ ろ が この FFC(フ ィー ド ・フ ォ ワー ド ・コン トロー ル)は 制御 対 象 が線 形 で あ る こ とを前 提 とし てい るの で,対 象 の 線 形 化 補 償 を行 う必 要 が あ る。 そ こで 非対 称 シ リンダ お よ びサ ー ボ弁 部 の 持 つ非 線 形 性 に対 して線 形 化 補償 を行 う. 2 主 な 記 号 A1、A2 : シ リ ンダ 受圧 面 積 gc : ゲ イ ン定 数 i : サ ー ボ 弁 入力 電 流 k=A2/A1 : 受 圧 面積 比 * 平 成9年4月3日 原 稿 受 付 ** 武 蔵 工 業 大 学機 械 シ ス テム 工 学 科 (所在 地 〒158東 京 都 世 田谷 区 玉堤1-28-1)M : 負荷 質 量 p : 圧 力 ps : 供給 圧 力 pL : 負 荷 圧 力 q : 流 量 s : ラプ ラ ス演 算 子 T : サ ンプ リン グ タ イム vc : シ リ ンダ速 度 x : スプ ー ル変 位 xe : 線 形 化補 償 器 入 力 xi : 線 形 化補 償 器 出力 y : シ リン ダ変 位 yd : 目標値 yz : フ ィー ドフ ォ ワー ドコ ン トロー ラ出 力 z : z変 換 演 算 子 α : サ ー ボ弁 の 定数 3 制 御 系 の 構 成 Fig.1に 実 験 装 置 の概 略 図 を示 す.非 対称 形 油 圧 シ リンダー をサ ー ボ弁 で 駆動 して 負荷 質 量 の位 置決 め 制 御 を実施 す る.サ ー ボ弁 の スプ ー ル 変位 をギ ャ ップ セ ンサ で,出 力 ポー トの圧 力 を半 導 体 式圧 力計 で,ま た シ リンダ変 位 を ポテ ン シ ョ メー タで そ れ ぞ れ検 出 で き る よ うに な って い る.シ グナ ル ジ ェネ レー タ で 目標 値 信 号 を与 え,制 御 の た め の演 算 処 理 をDSPで 行 う. Fig.2に 制 御 系 の 構 成 を示 す.シ リ ン ダ 変 位yの フ ィー ドバ ッ クに よ り位 置 の制 御 を行 う.ス プー ル変 位xを サ ー ボ ア ン プ 入 力部 に フ ィー ドバ ッ クす る こ と に よ り,マ イ ナ ルー プ を形 成 し,サ ー ボ弁 ス プー ル変 位xの 位 置 決 め性 能 を向 上 させ て い る.検 出 し た負 荷 圧 力pLと 偏 差 信 号xeの 符 号 を利 用 して 制 御 対 象 の線 形 化 補 償 を 実施 す る.ZPETCを 用 い たFFCに よ っ て シ ス テム の 周 波数 特 性 を向 上 させ る.こ れ ら線形 化 補 償 お よ びFFCをDSPに よ って 高速 で処 理 す る. 4 線 形 化 補 償 Fig.3に 示 す 非 対称 形 シ リン ダ を有 す るス プー ル弁 サー ボ モー タ部 の 特性 を調べ る に 当 た りス プ ー ル弁 は ゼ ロ重 合 で スプ ー ル とス リー ブ 間お よび シ リ ンダ摺 動 部 に は漏 れ が ない もの と仮 定 し,作 動 油 の 圧縮 性 を無 視 す る と,シ リン ダ速 度 νcと流 量q1,q2と の 関係 は3) (1) た だ しq1,q2を 初 め 変 数 の 符 号 はFig.3に 示 す 矢 印 の 方 向 を 正 とす る.ま た νcの正 を 引 き 側 方 向,負 を 押 し
Fig.1 Schematic diagram of the test rig
Fig.2 Block diagram of the control system
774
油
圧
と 空
気 圧
側 方 向 と表 現 す る. シ リン ダに働 く油 圧 力fは (2) こ こ で 出 力圧 力pLお よ び受 圧 面 積 比kを 次 式 で定 義 す る. (3) (4) 流 量 と,サ ー ボ弁 の ポー ト前 後 の 圧 力 差 の 関係 は, スプ ー ル 変位xの 正 負 に よ って 異 な る. (5) (6) 式(1),(5),(6)よ り (7) 式(3),(7)よ り (8) (9) 式(8),(9)を 式(5),(6)に 代 入 す る と (10) (11) x<0の 場 合 (12) (l3) 式(1)、(12),(13)よ り (14) 式(3),(14)よ り (15) (16) 式(15),(16)を 式(12)、(13)に 代 入 す る と (17) (18) 以上 の式 よ り,ス プ ー ル変 位 の 正 負 に よ っ て特 性 が 異 な る こ と を含 め て,ス プー ル変 位 とサー ボ弁 出 力 流 量 の 関係 が 非 線 形 に な る. こ こ で シ リン ダ速 度 νcを次 の よ うに入 力信 号xeに 比 例 す る よ うに 線 形化 す る事 を考 え る. (19) こ こ で比 例 定 数 αlは便 宜 的 に次 式 で与 え る。 た だ し gcは 調 整 可 能 な 定数 で あ る. (20) こ の シ リ ン ダ 速 度 を実 現 す る た め に 必 要 な ス プ ー ル 変 位xと 入 力 信 号xeと の 関 係 は シ リ ン ダ 速 度 と流 量 の 関 係 式(1)に,流 量 と ス プ ー ル 変 位xの 関 係 式(10)また は (17)を代 入 し,式(19)と 比 較 して 求 め ら れ る. xe≧0の 場 合,式(10)を 用 い て (21) xe<0の 場 合,式(17)を 用 い て (22) この スプ ー ル変 位xをFig.2の サ ー ボ ア ン プ 入 力信 号xiと してサ ー ボア ンプ に 与 え る こ とに よ り非 対 称 シ リンダ を有 す る スプ ー ル弁 サー ボモ ー タ部 の 線 形 化補 償 が 行 わ れ る.た だ しこ の 線 形 化 補 償 を行 う場 合, サ ー ボア ンプ 入 力xiと 実 際 の スプ ー ル 変 位xは 一 致 し て い る もの と仮 定 す る。 こ れ らの計 算 に はDSPを 用 い て い る.こ の よ うな 条 件 分 岐 や 平 方 根 の 計 算 な どアナ ロ グで は 困難 な演 算 も 簡 単 に 高 速 で行 え る こ とはDSPの 特 徴 の 一 つ と して あ げ られ る. 5 ZPETC 制 御 対 象 が 不 安 定 零 点 を含 む シ ステ ム で は,単 純 に シ ス テ ムの 逆 数 を取 るFFC(フ ィー ド.フ ォ ワー ド ・ コン トロー ラ)を 用 い る と不 安 定 な零 点 が不 安 定 な極 に な っ て しま い,コ ン トロー ラの 動 作 が 不安 定 に な っ て し ま う.そ こで,制 御 対 象 が不 安 定 な 零点 を含 む シ ステ ム に は次 の よ うなZPETCを 用 い る1). ここ で制 御 対 象 の伝 達 関数 が次 式 の よ うに表 示 で き る もの と仮 定 す る.Fig.3 Spool valve servo motor with nonsym-metrical cylinder
(23) さ ら にβ(z-1)をFFCで 補 償 で き る部 分 とで きな い 部 分 に 分 け 次 の よ うにお く. (24) た だ し Ba(z-1) : 補 償 可 能 な 零 点 を 持 つ 因 数 Bu(z-1) : 補 償 不 可 能 な 零 点 を持 つ 因 数 Bu(z-1)=b0u+b1uz-1+… +bruz-r Bu(z-1)に 関 し て は 位 相 遅 れ を 無 く し,低 周 波 域 で の ゲ イ ン を0dBに す る こ と に し て,次 の よ う に ZPETCの 伝 達 関 数FZPETCが 求 ま る. (25) た だ し
B*u(z-1) = z-rBu(z) = bru+b(r-1)uz-1+…+ bouz-r 次 にZPETCを 実 機 へ 適 用 す る こ と を 考 え る.ま ず 制 御 対 象 の 周 波 数 特 性 を 測 定 し,こ れ を 次 式 の よ う に 2次 遅 れ 要 素 と む だ 時 間 要 素 で 近 似 す る. (26) z領 域 に お け る 伝 達 関 数G(z-1)を 得 る た め,ア ナ ロ グ の 伝 達 関 数G(s)に 双 一 次 変 換 を適 用 す る.ま た,む だ 時 間 要 素 はd=L/Tス テ ッ プ 分 の 遅 れz-dと す る. 次 に 示 す 双 一 次 変 換 の 式 を(26)式に 代 入 し変 換 す る. (27) た だ し離 散 時 間 で の 周 波数 ひず み を補正 す るた め, 式 中 の ωnを次 の変 換 式 に よ りωn'に補正 して お く. (28) 伝達 関数G(z-1)が 次 式 の よ うに 求 ま る. (29) この場 合,伝 達 関 数 の 零点 が-1と な り不安 定 零点 に な る.よ っ てZPETCを 適 用 す る こ とにす れ ば, (30) これ を実 際 に利 用 す る に は(30)式中のz2を 除 い て コ ン トロー ラ を作 成 す る.し た が って む だ 時 間 要 素 の4ス テ ップ と合 わせ て,合 計(4+2)ス テ ップ分 シ ステ ム の 目標 値 信 号 知 を進 め て お く必要 が あ る. 6 実 験 結 果 油 圧 源 の供 給 圧 力ps=6.86MPa,サ ン プ リン グ タ イ ムT=0.2msで 実 験 を行 っ た。 6.1 線 形 化補 償 の結 果 線 形 化 補償 の効 果 につ いて,負 荷 質 量,振 幅,波 形 の各 影 響 を調べ る.Fig.4は 目標 値 と して振 幅0.2mm, 周 波 数60Hzの 正 弦 波 を シ ス テ ム に 加 え た と きの 線 形 化 補 償 前 と後 の シ リン ダ変 位 を示 した もの で あ る.補 償 前 に 見 られ て い た 出 力波 形 の 方 向 に よ る違 いが 線 形 化 補 償 に よ り無 くな り,目 標 値 に 対 して 線 形 な 出 力関 係 が 得 られ て い るこ とが わか る.
Fig. 4 Wave forms observed before and after linearization is used. Sinusoidal wave in-put of 60 Hz and amplitude 0.2 mm.
Fig . 5 Wave forms observed before and after linearization is used. Sinusoidal wave in-put of 60 Hz and amplitude 0.6 mm.
776
油 圧
と 空
気 圧
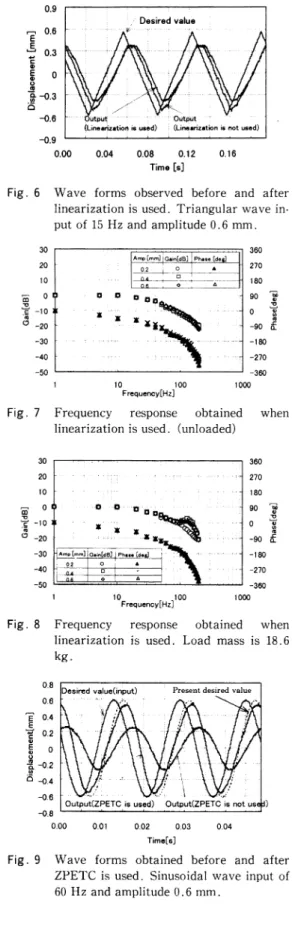
Fig.5は 目標 値 の 振 幅 を0.6mmと 変 えて,線 形 化 補 償 前 後 の シ リン ダ変 位 を観 測 した もの で あ る.振 幅 の 変 化 に よ らず,線 形 化 補 償 の効 果 が 現 れ,押 し側,引 き 側 と も シ リン ダ変 位 が 等 し くな っ て い る こ とが わか る. Fig.6は 目標 値 と して 三角 波 を 入 力 した場 合 の 線 形 化補 償 前後 の 観 測 結 果 を示 して い る.高 周 波 の 周 波数 成分 を含 む三 角 波 を 目標信 号 と して も線 形 化 補償 に よ り シ リン ダ変 位 の 正 負 に よ る変 位 の違 いが 無 くな りシ ス テ ム を線 形 に して い るこ とが わか る. Fig.7,8は 線 形化 補 償 後 の シ ス テ ムに つ い て 振幅 と,負 荷 を変 えて 周 波 数 応 答 を計 測 した結 果 を示 す. Fig.7は 無 負荷,Fig.8は 負 荷 質 量 を付 け,そ れ ぞ れ 振 幅 を0.2mm,0.4mm,0.6mmと 変 え て周 波 数 応 答 を測 定 し た.負 荷 状 態,振 幅 に 関 わ らず シ ス テム は100Hz付 近 ま で ほ ぼ 同 一 の 周 波 数 特 性 を 示 して い る.こ れ に よ り フ ィー ドフ ォ ワー ド補償 を行 う制 御 対 象 に 必 要 な 線形 性 を得 る こ とが 出来 て い る こ とが わ か る.ま た140Hz 付 近 で ゲ イ ンの 上 昇 が 見 られ る.こ れ は シ リンダ部 の 共振 現 象 に よ る もの と思 わ れ る. 6.2 ZPETCの 結 果 ZPETCに よ るフ ィー ドフ ォ ワ ー ド補 償 の パ ラ メー タを決 定 す るに 当た り,Fig.8に 示 され た線 形化 補 償 後 の制 御 対 象 の 周 波 数 応 答 を用 い て式(26)のパ ラ メー タ に 関 し て ωn。=2π×10orad/s,ζ=2,む だ 時 間L= 2.0mSと 決 定 した.こ の値 を も とにZPETCを 作 成 した. Fig.9にZPETC利 用 前後 の シ リン ダ変 位 の観 測結 果 を示 す.目 標 値 と して振 幅0。6mm,周 波 数60Hzの 正 弦 波 を入 力 して い る.ZPETC利 用 前 に 比 べZPETC利 用 後 の シ リン ダ変 位 は 振 幅 が補 償 さ れ ま た位 相 ず れ も少 な くな っ て い る こ とが わ か る。 な お,シ ステ ム に 与 え る 目標 値ydは 現 在 よ りd+2=12ス テ ップ分,前 の値 を与 え る.そ こで 図 の観 測 波形 に お い て 目標値 と出 力 に は12ス テ ップ(2.4ms)分 の ず れが 現 れ る こ とに な る. 破 線 は 目標 値 を12ス テ ップ分 遅 らせ て表 示 した もの で こ れ が現 在 の 目標 値 で あ り,出 力 は これ に 追従 して い る. Fig.10に 三 角 波 を入 力 してZPETC利 用 前 後 の 結 果 を示 して い る.ZPETC利 用 前 に 比 べ 高 周 波 成 分 も補 償 され て い る こ とが わ か る.ま た位 相 ず れ も正 弦 波 の 場合 と同様 に補 償 され て い る. Fig.11に 振 幅 を0.2mm,0.4mm,0.6mmと してZPETC 利 用後 の周 波 数 応 答 を示 す.補 償 に よ り各 振 幅 と も特 性 が 向上 して い る こ とが わ か る. ここ で振 幅0.4mm,0.6mmに お い て ゲ イ ンの 補償 で き る周 波数 限 界 に違 いが あ る.こ れ は各 振 幅 での 補 償 限 界 周 波数 に お い て流 量 が 飽 和 す る ため 限界 が 生 じ る もFig. 6 Wave forms observed before and after linearization is used. Triangular wave in-put of 15 Hz and amplitude 0.6 mm.
Fig. 7 Frequency response obtained when linearization is used. (unloaded)
Fig. 8 Frequency response obtained when linearization is used. Load mass is 18.6 kg.
Fig. 9 Wave forms obtained before and after ZPETC is used. Sinusoidal wave input of 60 Hz and amplitude 0.6 mm.
の と思 わ れ る.こ の よ う にZPETC利 用 に よ りサ ー ボ 弁 吐 出流 量 の 限 界 まで補 償 で きて い るこ とが わか る. 7結 論 非 対 称 シ リン ダ を持 つ 電気 油 圧 サ ー ボ シス テ ム の特 性 を 向上 させ るた め,DSPを 利用 して,ZPETCと 線形 化 補 償 を実 施 した 結 果,以 下 の成 果 が 得 られ た. 1: 線 形 化 補 償 に よ り,目 標 変 位 の方 向 や 振 幅 に依 ら ず シ ス テム を線 形 化 す るこ とが で き,フ ィー ドフ ォ ワー ド補 償 を実 施 す る際 に制 御 対 象 に必 要 と され る 線形 性 を達 成 す る こ とが で きた. 2: ZPETCと い う フ ィー ドフ ォ ワ ー ド補 償 に よ り, 高 周 波域 ま で シ ス テム の 周 波数 応 答 を向 上 させ る こ とが で きた. 参 考 文 献
1) Tomizuka,
M.:
"Zero phase error tracking
algorithm
for
digital
control",
Trans.
ASME, Journal
of Dynamic systems,
Mea-surement and Control, 109-1 (1985), 65/68
2) 鈴 木,浮 田: DSPを 利 用 し た 電 気 ・油 圧 サ ー ボ シ ス テ ム の 特 性 改 善 に 関 す る 研 究,日 本 機 械 学 会 論 文 集(C編),61巻582号(平7年2), 606/611 3) 高 橋,高 橋:"非 対 称 シ リ ン ダ を 有 す る ス プ ー ル 弁 式 サ ー ボ モ ー タ 系 の 動 特 性",日 本 機 械 学 会 論 文 集(B編),45巻399号(昭 和54-1), 1686/1695
Fig. 10 Wave forms obtained before and after ZPETC is used. Triangular wave input of
15 Hz and amplitude 0.6 mm.
Fig. 11 Frequency response obtained when ZPETC is used.


![For copies of the original instructions see [7]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)