2004 年度 卒業論文
心理的尺度による
感情付き歩行動作制御法の構築
Csontruction of the walking motion wiht emotion control method by psychological measure
提出日 :2005 年 2 月 2 日
指導教授
白井克彦 教授
早稲田大学 理工学部 情報学科
1G01P094-2
松井 和教
Kazunori Matsui
目 次
第1章 序論 5
1.1 研究背景 . . . . 5
1.2 本研究の目的 . . . . 5
1.3 構成 . . . . 6
第2章 感情付き歩行動作制御システム 7 第3章 心理的尺度 9 3.1 心理的尺度の定義 . . . . 9
3.2 心理的尺度の獲得方法 . . . . 9
3.2.1 BVHデータとは . . . . 9
3.2.2 スペクトル情報への情報量圧縮 . . . . 14
第4章 実験 16 4.1 実験方法 . . . . 16
4.2 実験結果 . . . . 17
4.2.1 「楽しく歩く」動作の結果 . . . . 17
4.2.2 「怒って歩く」動作の結果 . . . . 18
4.2.3 「悲しく歩く」動作の結果 . . . . 19
4.2.4 考察 . . . . 19
第5章 完成したシステム 21
第6章 まとめと今後の予定 23
6.1 まとめ . . . . 23 6.2 今後の予定 . . . . 23
図 目 次
2.1 インタフェースのイメージ . . . . 8
3.1 人体モデル . . . . 11
3.2 関節の3回転軸 . . . . 12
3.3 BVHファイル . . . . 14
4.1 実験風景イメージ . . . . 17
4.2 「楽しく歩く」動作の結果 . . . . 17
4.3 「怒って歩く」動作の結果 . . . . 18
4.4 「悲しく歩く」動作の結果 . . . . 19
5.1 完成したシステム . . . . 21
表 目 次
4.1 「楽しいにおける心理的尺度」とαの値 . . . . 20 4.2 「怒りにおける心理的尺度」とαの値 . . . . 20 4.3 「悲しいにおける心理的尺度」とαの値 . . . . 20
第 1 章 序論
1.1 研究背景
近年、ディジタルコンテンツの流通に伴い、アバターや映画制作等に対して3DCGア ニメーションの使用頻度が増加している。さらに、家庭用PCの機能向上や利用者層の 拡大により、個人レベルでの3DCGアニメーション制作の需要も高まっている。個人を 対象にした場合には、複雑な操作が要求されるのではなく、簡単に操作できるものでな ければ受け入れられない。しかしながら、3DCGアニメーションを作成するにあたって、
人間を登場させる機会が多いにもかかわらず、人間を表現する上で欠かせない、感情付 き動作を表現することはキーフレームアニメーションや数値入力、さらにモーションキャ プチャ等、個人レベルで扱うには複雑であり、高い技能と熟練を要するだけでなく、コス トの面でも非常に困難なものとなっている。
そこで、個人レベルでも簡単に扱えるような直感的な制御により、3DCGアニメーショ ンが作成できるディジタルアクタシステムの構築が必要である。本稿では、簡単で尚且 つ直感的に動作が生成できるインタフェースを持つディジタルアクタシステムの構築を 試みる。
1.2 本研究の目的
本研究の目的は、CGキャラクタの感情をもった動作を簡単で尚且つ直感的に生成でき るシステムを構築することにある。
なお、本研究では感情付き動作の対象として、最も基本的で尚且つ多様性を保持する 動作である、歩行動作に限定して取り扱う。
第1章 序論
1.3 構成
本論文では、第2章で目標とするインターフェースについて述べ、第3章でそのイン ターフェースの構築法について述べる。第4章では心理的尺度を獲得するための実験方 法と得られた結果に対する考察を述べ、第5章ではそれをもとにして実装したシステム について述べる。第6章でまとめと今後の予定について述べる。
第 2 章 感情付き歩行動作制御システム
目標とするインタフェース
ディジタルアクタシステムのインタフェースは数値入力等の複雑なものではなく、ユー ザが容易に使用出来、尚且つ直感的なイメージを反映出来る必要がある。その1つとし て、スライダーの操作によって感情付き歩行動作を制御するインタフェースを提案する。
従来の研究では「大きく歩く」のような物理歩行動作に対して、内挿・外挿を用いる ことで動作を生成することが可能であることが明らかになっている[2]-[4]。また、感情付 きの歩行動作を内挿・外挿を用いることによって制御した前例があるが[1]、単純に物理 的変化を均等に変化させたものであるため、感情の変化が均等に変化しているか否かは 明らかではない。感情付き歩行動作を物理歩行動作と同様に内挿・外挿によるスライダ によって制御させるためには、スライダの1目盛り毎に均等に感情の変化を感じること ができる必要がある。そのためには、従来には無かった新たな指標を用いる必要がある。
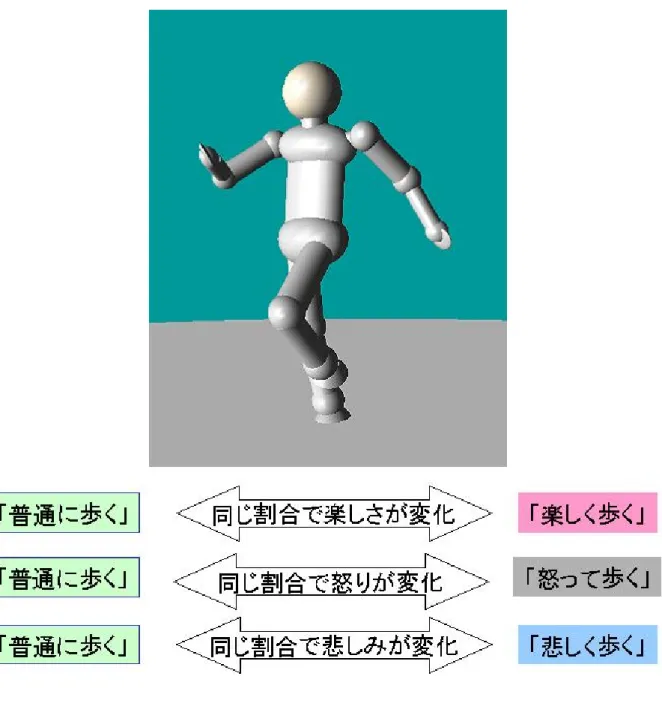
そこで、心理的評価による心理的尺度を用意して、それを均等に変化させることで、感情 も均等に変化させることが可能になる。本稿では、心理的尺度によって、「普通に歩く」
動作から「楽しく歩く」動作、「普通に歩く」動作から「怒って歩く」動作、「普通に歩 く」動作から「悲しく歩く」動作のそれぞれの感情付き歩行動作の感情の強さを、均等 に且つ連続的に変化させる3つのスライダを持つインタフェースを作成を目標とする。
第2章 感情付き歩行動作制御システム
図 2.1: インタフェースのイメージ
第 3 章 心理的尺度
3.1 心理的尺度の定義
心理的尺度とは「楽しく歩く」動作、「怒って歩く」動作、「悲しく歩く」動作それぞ れに存在し、「普通に歩く」動作から「楽しく歩く」動作、「普通に歩く」動作から「怒っ て歩く」動作、「普通に歩く」動作から「悲しく歩く」動作のそれぞれの感情付き歩行動 作の感情の強さを均等に変化させる心理的な評価による尺度のことを言う。
例えば、「普通に歩く」動作から「楽しく歩く」動作を均等に変化させる心理的尺度を
「楽しいにおける心理的尺度」と呼ぶことにする。
3.2 心理的尺度の獲得方法
物理動作と同様に「普通に歩く」動作から「楽しく歩く」動作、「普通に歩く」動作か ら「怒って歩く」動作、「普通に歩く」動作から「悲しく歩く」動作それぞれの内挿・外 挿による歩行動作データを作成し分析する。
モーションキャプチャによって収録された10人分の「普通に歩く」動作、「楽しく歩 く」動作、「怒って歩く」動作、「悲しく歩く」動作のBVHデータを用いた。
3.2.1 BVH データとは
BVH形式のファイルフォーマットは、モーションキャプチャーデータの収録・販売を 行っているBiovision社によって定義された。BVHとはBioVision Hierarchical dataの略 である。
BVHファイルは、2つのデータから構成されている。1つはモーションを行うオブジェ クトの構造を記述したものである。オブジェクトは19の関節パーツの連結として定義さ
第3章 心理的尺度 れている。この19関節の連結を階層構造を用いて記述したものが階層構造データである。
このオブジェクトはオブジェクト初期姿勢と呼ばれ、本研究で用いたオブジェクト(人 体モデル)を図式化すると図3.1になる。オブジェクトの定義はパーツを記号「{」「}」を 用いて再帰的に表現され、以下の様に記述されている。
¶ ³
HIERARCHY ROOT Hips {
OFFSET 0.0000 0.0000 0.0000
CHANNELS 6 Xposition Yposition Zposition Zrotation Xrotation Yrotation JOINT LeftHip
{
OFFSET 3.4300 -0.0000 -0.0000
CHANNELS 3 Zrotation Xrotation Yrotation JOINT LeftKnee
{
OFFSET 0.0000 -18.4700 0.0000
CHANNELS 3 Zrotation Xrotation Yrotation JOINT LeftAnkle
{
OFFSET -0.0000 -17.9500 0.0000
CHANNELS 3 Zrotation Xrotation Yrotation End Site
{
OFFSET -0.0000 -3.1200 0.0000 }
} } }
JOINT RightHip
...
µ ´
オブジェクトの構造データの開始位置は、”HIERARCHY”というキーワードで開始さ れる。そして、その行に続く”ROOT”はオブジェクトを定義する階層構造の一番上位にあ るパーツを示している。人間を表すオブジェクトの場合、腰を表現するパーツを”ROOT”
として定義する。また、その他のパーツは、パーツが接続されている関節を定義してあ
第3章 心理的尺度
LeftHip
LeftKnee
LeftAnkle
RightHip
RightKnee
RightAnkle Hip
Chest Chest2 RightColler LeftColler
RightShoulder
RightWrist RightElbow LeftElbow
LeftWrist
Head Neck
LeftHip
LeftKnee
LeftAnkle
RightHip
RightKnee
RightAnkle Hip
Chest Chest2 RightColler LeftColler
RightShoulder
RightWrist RightElbow LeftElbow
LeftWrist
Head Neck
図 3.1: 人体モデル
り、”JOINT”と表現してある。
次にキーワード”OFFSET”であるが、この後に続く3つの数字はROOTからの位置を 定義してある。3つの数字はそれぞれX軸、Y軸、Z軸の順番で定義されている。
その下に続くキーワード”CHANNELS”はパーツが持つことのできるパラメータの数を 定義してある。”ROOT”には回転情報のほかオブジェクト全体の位置を示す情報が必要で あるため位置が3軸、回転が3軸の合計6つのパラメータを定義されている。”JOINT”は 初期姿勢から求められる”ROOT”からの相対位置から位置を計算できるため”JOINT”に 繋がるパーツの3軸の回転の情報のみが定義される。従って、”ROOT”は”CHANNELS 6
第3章 心理的尺度 Xposition Yposition Zposition Zrotation Xrotation Yrotation”の様に定義され、”JOINT”
は”CHANNELS 3 Zrotation Xrotation Yrotation”の様に定義されている。
最後にオブジェクトの先端(例えば手の先や足の先)は”End Site”として”ROOT”から の位置を定義してある。
BVHを構成するもう1つのデータはフレーム毎の”ROOT”の位置データと”JOINT”及 び”ROOT”の回転データである。各関節におけるZrotation、 Xrotation、 Yrotationの 回転軸は、図3.2のように設定されている。
X軸 Y軸 Z軸 X軸 Y軸 Z軸
図 3.2: 関節の3回転軸
フレームデータはキーワード”MOTION”から開始する。フレームデータは、先ほどの 階層構造の定義データに続き、以下の様に記録されている。
第3章 心理的尺度
¶ ³
...
CHANNELS 3 Zrotation Xrotation Yrotation JOINT Head
{
OFFSET -0.0000 5.1900 0.0000
CHANNELS 3 Zrotation Xrotation Yrotation End Site
{
OFFSET -0.0000 4.1400 0.0000 }
} } } } } MOTION Frames: 200
Frame Time: 0.0333333
12.330000 −7.790000 0.430000 −7.260000 −26.570000 −8.930000 · · · 0.000000 0.000000 0.000000 −0.100000 0.120000 −4.370000 · · ·
... ... ... ... ... ... . ..
µ ´
”MOTION”の次の行に続く”Frames:”はデータ全体の長さを示すパラメータである。例 では200となっているので、このBVHは200フレーム記録されてることになる。次に続 く”Frame Time:”は1フレームあたりの秒数を示すパラメータである。例では”0.0333333”
すなわち30分の1秒である。つまり、このBVHは30Hzのモーションを記録しているこ とになる。
この下に続くデータ列が”ROOT”の位置情報及び各関節の回転情報が行方向に時系列 順に記録されている。このデータ列は、登場した”JOINT”順に”CHANNELS”で指定され たパラメータが右方向に記述される。BVHデータとは、19関節からなる人体モデルを定 義し、各関節(joint)についてのローカルな座標系での回転角度(19関節×3軸方向)、
及び体の中心(Hip)の位置情報(position)から成る移動情報(19関節×3軸方向)の
第3章 心理的尺度 時系列データ(計60パラメータ×フレーム数(30fps))より構成されている(図3.1、3.3 参照)。
4.91 -15.04
3.72 -1.95
-52.03 45.77
43.30
5.34 -16.48
……
3.47 ……
-2.11 -52.70
45.89 42.81
Head-Y Head-X
Hip-X ……
Hip-Z Hip-pZ
Hip-pY Hip-pX
4.91 -15.04
3.72 -1.95
-52.03 45.77
43.30
5.34 -16.48
……
3.47 ……
-2.11 -52.70
45.89 42.81
Head-Y Head-X
Hip-X ……
Hip-Z Hip-pZ
Hip-pY Hip-pX
……
…
……
…
……
…
……
…
……
…
……
…
……
…
position joint
フレ ーム 数
60パラメータ
図 3.3: BVHファイル
3.2.2 スペクトル情報への情報量圧縮
歩行動作における関節動作は全て周期的な運動をするため、それらの時系列データは 周期信号として捉えることが可能である。よって、全関節動作の時系列データは式(1)の ようにフーリエ級数で近似できる。
Θm(t) =
∑∞ n=−∞
Cmnei2πnT t (3.1)
各係数は関節運動を周波数領域に変換したときの各成分から求める。Θm(t)は求める 関節の曲げ角度であり、時間tの関数になる。mは関節運動番号であり、本稿で扱う19 関節×3軸方向の関節運動を示す。nは高調波の次数であり、| Cmn |は関節運動番号m の関節運動をフーリエ変換したときの第n高調波のスペクトル強度である。
第3章 心理的尺度 また、過去の研究より、人物動作における関節動作は、全て第3高調波までのスペクト ル情報で十分動作を再現可能であることが示されている[1]。歩行データごとに被験者の 個性などが含まれているため、それらを排除する必要がある.そこで、それぞれの歩行動 作10人分のデータを平均し、そのそれぞれを「普通に歩く」動作、「楽しく歩く」動作、
「怒って歩く」動作、「悲しく歩く」動作の代表とする。「普通に歩く」動作のスペクトル データの平均をCmn、感情付き歩行動作のスペクトルデータの平均をCmn, とすると、そ の物理的な変化に対応した特徴量ωmnは(2)式より求まる。
ωmn =Cmn, −Cmn (3.2)
さらに、(3)式によって、16段階の内挿・外挿動作データAαを作成する。
Aα =Cmn+α×ωmn(α= 0.0,0.2,· · ·,3.0) (3.3) これらの式によって、「楽しく歩く」動作、「怒って歩く」動作、「悲しく歩く」動作そ れぞれ16段階の内挿・外挿による歩行動作データを作成し心理的評価を行う実験をし、
その評価値を分析することによって心理的尺度を獲得する。
第 4 章 実験
「楽しいにおける心理的尺度」、「怒りにおける心理的尺度」、「悲しいにおける心理的 尺度」を獲得するために実験を行う。
4.1 実験方法
まず、作成した「普通に歩く」動作から「楽しく歩く」動作を内挿・外挿した16段階 の歩行動作を被験者にランダムに提示し、「普通に歩く」を0点、被験者がイメージする 最も「楽しく歩く」動作を100点として、それぞれの動作に点数をつけてもらう。ただ し、被験者がイメージする最も「楽しく歩く」動作よりもさらに楽しいと感じる歩きが あれば、100点以上の点数をつけても構わないものとする。次に、被験者がつけた最高点
を100点として0〜100点になるように正規化し、それを被験者の数で平均を取り、さら
に0〜100点に正規化する。これを「楽しいにおける心理的尺度」とする。これを「普通
に歩く」動作から「怒って歩く」動作と、「普通に歩く」動作から「悲しく歩く」動作に も同様に行う。
第4章 実験
図 4.1: 実験風景イメージ
4.2 実験結果
4.2.1 「楽しく歩く」動作の結果
0 10 20 30 40 50 60 70 80 90 100 110
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 3.0 αの値
楽し いに おけ る心 理的 尺度
図 4.2: 「楽しく歩く」動作の結果
第4章 実験 0.0≤α≤2.4で全体的に増加し、それ以降は減少に転じる。0.0≤α ≤0.6では、ほと んど変化が見られない。0.6≤α≤1.4は振動している。
4.2.2 「怒って歩く」動作の結果
0 10 20 30 40 50 60 70 80 90 100 110
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 3.0 αの値
怒り にお ける 心理 的尺 度
図 4.3: 「怒って歩く」動作の結果
0.0≤α≤2.6で全体的に増加し、それ以降は減少に転じる。0.0≤α≤0.4、0.8≤α≤ 1.2ではほとんど変化が見られない。1.2≤α≤1.8は振動している。
第4章 実験
4.2.3 「悲しく歩く」動作の結果
0 10 20 30 40 50 60 70 80 90 100 110
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 3.0 αの値
悲し いに おけ る心 理的 尺度
図 4.4: 「悲しく歩く」動作の結果
0.0≤α≤2.2で全体的に増加し、それ以降は減少に転じる。0.0≤α≤0.2ではほとん ど変化が見られない。0.8≤α≤1.4は振動している。
4.2.4 考察
「楽しく歩く」動作、「怒って歩く」動作、「悲しく歩く」動作の全てにおいて、αの値 が増加するに従って、心理的尺度が始めは増加し、あるところで減少に転じるという傾 向が見られた。心理的尺度が増加する部分だけを用い、さらにその部分で振動している 部分は平均を取ることによって、心理的尺度を10点毎に変化させれば、1目盛り毎に感 情の強さを変化させるスライダが作成可能であると考えられる。これによって、心理的 尺度とそれに対応する内挿・外挿におけるαの値の関係を示す次の表を得た。
実際の動作と違い、感情付き歩行動作のアニメーションではαの値が1.0以上となる外 挿、つまり誇張した動作が重要だと言える。
第4章 実験 表 4.1: 「楽しいにおける心理的尺度」とαの値
楽しいにおける心理的尺度 αの値
0 0
10 0.6239
20 0.8911
30 0.8996
40 0.9080
50 1.3131
60 1.6013
70 1.6820
80 1.7627
90 2.1007
100 2.4
表 4.2: 「怒りにおける心理的尺度」とαの値
怒りにおける心理的尺度 αの値
0 0
10 0.6624
20 1.1196
30 1.2485
40 1.4943
50 1.2718
60 1.7376
70 1.7897
80 2.1274
90 2.4710
100 2.6
表 4.3: 「悲しいにおける心理的尺度」とαの値
悲しいにおける心理的尺度 αの値
0 0
10 0.4132
20 0.5343
30 0.7043
40 0.8431
50 0.9174
60 1.0897
70 1.3228
80 1.3988
90 1.7232
100 2.0
第 5 章 完成したシステム
図 5.1: 完成したシステム
実験によって獲得した、「楽しいにおける心理的尺度」、「怒りにおける心理的尺度」、
「悲しいにおける心理的尺度」それぞれをを0点から100点まで10点毎に変化させた11動 作を生成できるスライダを合計3つ作成することによって、「普通に歩く」動作から「楽 しく歩く」動作、「普通に歩く」動作から「怒って歩く」動作、「普通に歩く」動作から
第5章 完成したシステム
「悲しく歩く」動作が均等に変化する動作が作成できるシステムを実装した。
スライダを操作するだけで感情付き歩行動作が作成できるので、心理的尺度によって、
「普通に歩く」動作から「楽しく歩く」動作、「普通に歩く」動作から「怒って歩く」動 作、「普通に歩く」動作から「悲しく歩く」動作のそれぞれの感情付き歩行動作の感情の 強さを、均等に且つ連続的に変化させる3つのスライダを持つインタフェースを作成す るという目標が達成できた。
第 6 章 まとめと今後の予定
6.1 まとめ
本稿では、「普通に歩く」動作から「楽しく歩く」動作、「普通に歩く」動作から「怒っ て歩く」動作、「普通に歩く」動作から「悲しく歩く」動作のそれぞれの感情付き歩行動 作の感情の強さを均等に変化させるスライダを持つインタフェースを作成を試みた。感 情の強さを判断する指標となる心理的尺度を定義し、実験によって「楽しいにおける心理 的尺度」、「怒りにおける心理的尺度」、「悲しいにおける心理的尺度」を獲得した。それ によって、物理歩行動作と同様に単純に内挿・外挿で歩行動作を変化させるのではなく、
それぞれの心理的尺度を10点毎に変化させるスライダを作成し、そのスライダによって、
ユーザが容易に使用出来、尚且つ直感的なイメージを反映出来るシステムが完成した。
6.2 今後の予定
「楽しく歩く」動作から「悲しく歩く」動作、「楽しく歩く」動作から「怒って歩く」
動作、「怒って歩く」動作から「悲しく歩く」動作のような感情付き歩行動作間でも同様 に動作を作成してこのシステムに実装する予定である。
関連図書
[1] 鵜沼宗利,武内良三, ”コンピュータアニメーションにおける感情を伴った人間の歩行 動作の生成方法,”電子情報通信学会論文誌,D-II,Vol.J76-D-II, No.8,pp.1822
[2] 鵜沼宗利,武内良三, ”感情を伝え合うコミュニケーションを行うインタフェースエー ジェント”情報処理学会研究報告,2004-HI-107 pp33-40
[3] 稲田和彦,佐藤潤一,中川雅通,浜田正弘,前原文雄,”関数近似と逆運動学を用いた人 物動作の生成方法,”画像電子学会研究予稿,94-01-02
[4] 西田諭司,杉浦彰彦,”アクションユニットを用いた人間の動作の分析・作成,”豊橋技 術科学大学
謝辞
本研究を進めるにあたり、研究環境を整え、適切なご助言をいただきました白井先生 に深く感謝いたします。御多忙にも拘らず数々の御指導をしていただいた、東洋大学の 村上先生と、人間科学部の誉田先生には大変感謝しております。お二人のおかげで、本 卒業論文を完成させることができました。同じマルチモーダル感情表出チームのM2の長 船さんと森野さんには本当にお世話になりました。長船さんには研究内容や論文の書き 方について丁寧に詳しく教えていただきありがとうございました。森野さんにはシステ ムを作る上でプログラムについて詳しく教えていただきありがとうございました。もっ とプログラムの勉強をしなければならないと感じています。M1の板野さんには研究の相 談にのっていただいたり、助言をいただきありがとうございました。そして、画像班の みなさんに感謝します。
最後に、精神的にも経済的にも支えてくれた両親に最大限に感謝の気持ちを捧げます。
今年の1月に亡くなった父の冥福を祈ります。