自動運転システムにおける情報処理技術の最新動向:1.自動運転の開発動向
5
0
0
全文
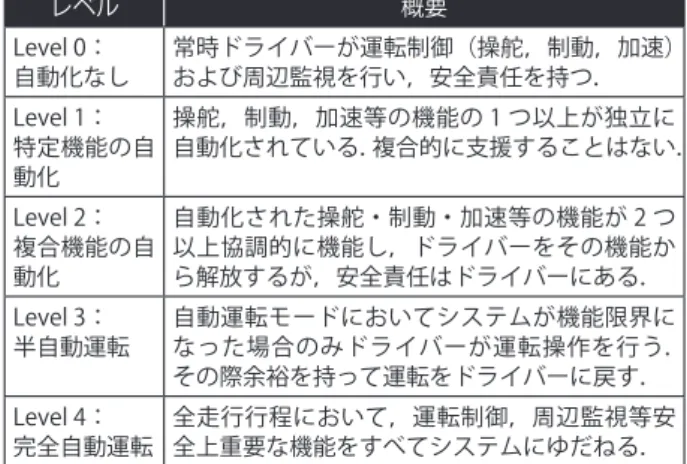
(2) ❶ 自動運転の開発動向. 発される.そうしたクルマは,ハードウェア技術の. 通ルール”に則り,停止を含む走行可否や最適な経. 延長線上として数年のうちに十分実現されるものと. 路を「判断」する必要がある.その上で,想定した. 見込まれるが,今後は,そのシステムにどのような. 経路を正確に走るデータを生成し,電子制御ユニッ. 走行アルゴリズム(ソフトウェア)を入れるのか,. ト(Electronic Control Unit:ECU)やアクチュエー. 誰がそれを作るのか,さらにアルゴリズムの正確さ. タに出力(運転)し「操作」を実行する必要がある.. のみならず,ネットワークセキュリティやプライバ シーが十分に担保された上で常に正しい命令を走行. * 自動運転とセンサフュージョン. 系に対して入力し続けられるのか,ということが重. 環境認識をカメラ画像だけで実現するのは難しい.. 要な問題になる.そして,それはおおむねハードウ. カメラ自体の画像認識技術は非常に高度化している. ェアの問題ではなくソフトウェアの問題と言える.. が,その高解像度化に伴い,全体から「どこに何が あるか」を認識するとなると計算負荷が幾何級数的 に高くなり,システムのコストが高くなってしまう.. 自動運転に必要な認識技術. そこで,カメラだけでなくレーダやレーザ光線で空. * 自動運転と認識,判断,操作. 間上のオブジェクトを把握する技術(Light Detection. そもそも普通の運転と自動運転とはどこが違うの. and Ranging:LIDAR)など各種センサを複合的に組. か.普通の運転は人間がドライバーとしてアクセル,. み合わせ,信号の位置を把握する.交差点内の信号. ハンドル,ブレーキを操作し,さらに視覚を用いて. のみならず,雪でも雨でも昼でも夜でも,走行する周. ☆3. 周囲を確認しながら安全の責任をもって走る. .こ. 囲 360 度の環境情報を正確に認識できるようにする.. れに対して自動運転では,人間がアクセル,ハンドル,. ただし,それぞれのセンサには得意・不得意があ. ブレーキを操作する必要がなくなり,周囲の監視義. る.たとえばカメラであれば距離は正確には分から. 務もなくなり,システムが人間の代わりに運転する.. ないが色が分かり文字認識が可能となる.レーダや. このシステムの一部として走行アルゴリズムのソ. LIDAR は色は分からないが空間中の方向や距離が分. フトウェアが走る.高速道路を自動走行するアルゴ. かる.こうして各種センサを複合的に融合する技術. リズムを記述するのは比較的簡単だが,一般道路に. をセンサフュージョンといい,何がどこにあるかと. おけるアルゴリズムは非常に複雑だ.一般道路には. いうことを正確に把握する.さらに,センサフュー. 信号があり,道路標識があり,歩行者がいて,自転. ジョンの先に,車線逸脱警報や前方衝突警報,死角. 車やバイクもいる.そこに何が飛び込んでくるか分. 認識や ACC(Adaptive Cruise Control)の高度化など. からない.対向車や信号,歩行者の動きを予測して. のアプリケーションも構築される.また,センサフ. 適切なタイミングで右左折しなければいけない.こ. ュージョンもシステム上のソフトウェアで解決する.. うした状況に対して人間が意識,無意識に行ってい る「認識」 , 「判断」,「操作」を代替するアルゴリズ. * 高精度 3 次元地図データベースの重要性. ムを開発しなければならない.. 上記のように「どこに何があるか」を認識する場. まず「認識」のためにはセンサによる環境セン. 合,各種センサのみならず地図に頼ることも重要と. シングが必要だ.たとえば“3 つ先”の交差点を曲. なる.現在のカーナビゲーション用の地図は基本的. がろうとした際に,人間であれば“3 つ先”の“信. に人間に経路を案内するために十分な 2 次元の情. 号”は難なく分かる.また,それ以前に自分の“直. 報で構成されている. ☆4. 近”の“信号”が“赤”になれば止まらないといけ. ☆ 3. ない.同時に異なる場所の複数の信号を認識し,自. ☆ 4. 身や同乗者の安全,快適,安心等の状況を鑑み, “交. .一方,自動運転用には空間. まさに NHTSA の Level 0 〜 Level 3 の定義は自動運転との対比に おいて,“普通の運転”を説明しているとも言える. 現在のカーナビゲーション用の地図でも見かけ上は 3 次元のよう に表示されるものもある.. 情報処理 Vol.57 No.5 May 2016. 437.
(3) 特集 自動運転システムにおける情報処理技術の最新動向. がこれから渡るのか,当面渡らないのか,といった ことや,警察官が手信号で行う交通整理等のジェス チャも点群の分析で認識可能との話もある.また, カメラ画像と異なり点群であれば個人の同定は困難 なため,プライバシー問題が発生しないという可能 性もあり,一石二鳥以上だ.. 図 -1 点群のイメージ:物体の形状や位置を 3 次元的に把握し, その特性から今後の動きも予測する ©Intel Corporation. * Vehicle IoT を利用した見えない世界への対応 ここまでの話は「見える世界」をどう認識するか という話だった.人間ももちろん,見える世界を認. 情報を持つ 3 次元地図が重要となる.たとえば,空. 識してクルマを運転しているが,人間は経験に基づ. 間上の特徴点として信号の XYZ 座標が与えられれば,. き一瞬の兆候からある程度危険を感知しながら,細. 先の交差点の例でも,それらに基づき曲がるべき信. 心の注意を払って運転する.しかし,そこまでセン. 号や止まるべき信号を容易に特定し,効率的で正確. サデータから読み出すことは難しい.. な認識が可能になる.さらに,空間上の複数の与えら. たとえばドイツのアウトバーンでは時速 200km. れた座標から自車位置を正確に逆算することもできる.. でも運転支援を行うことが期待されている.一方,. こうして,各種センサや地図を複合的に利用し,正確. センサはたかだか 200m 先までしか見えず,時速. に自分自身の位置を含め周囲環境を「認識」する.. 200km で 200m を走ると 3.7 秒になる.すなわち,. さらにそうした 3 次元地図では,空間上の特徴. たかだか 3.7 秒先しか見ないで走ることになり非常. 点の位置のみならず,道路の勾配や曲率半径,車線. に危険だ.見えないところでの車線の劣化や事故車. の劣化に関連する反射率,停止線の位置,交通標識. の有無,工事等による車線減少など,先に存在する. 情報や道路組成等々の属性データや,渋滞状況やゲ. リスクをいかに適宜知るかが重要な課題になる.. リラ豪雨等時間とともに変化するダイナミックな状. 対策として冒頭で触れた Vehicle IoT を用いて,過去. 況などを含み,必要なデータを取り出せるようにデ. に走ったクルマのデータを分析し状況を把握するとい. ータベース化されており,自動運転に必要な環境認. う考え方がある(図 -2).不動体や準不動体であれば,. 識をより正確かつ効率的に支援する.. 経時的な処理を経て,統計的予測も含め,計画的な 走行を支援する情報としてデータベース化する.クルマ. * LIDAR による点群処理. 会社は,各社が自動運転車を販売した国々からデータ. LIDAR はレーザ光線の光の粒を物体に照射して,方. を集められるようにグローバル・データセンタを構築し,. 向と跳ね返ってくる時間を計算し,空間上の物体の位. 環境認識を支援する.さらに,地図会社は各社からの. 置や形状を特定する.これをクルマに装着すれば周. 情報を集約し国際規模で地図データベースをアップデ. 辺の物体(動体および不動体)との相対的な距離や位. ートし,クルマ会社に供給するという動きもある.. 置関係が把握可能となる.その上で,周囲のクルマ や歩行者等の 3 次元の物体を 3 次元形状のまま捉え, どの方向から見ても人間やクルマなどを把握すること. 438. 自動運転に必要な判断・操作. もできる(図 -1) .. * 認識から,判断・操作へ. さらに,点群の分析から人間の今後の行動の意図. 自動運転では,システムが環境状況を「認識」す. やジェスチャが分かるとも指摘されている.たとえ. ると同時に,ECU 等のデータから自分の走行状態. ば,歩道上に見つけた人間の位置とともに,その人. も「認識」し,また地図データベースから先の情報. 情報処理 Vol.57 No.5 May 2016.
(4) ❶ 自動運転の開発動向. も参照し,その後どのように走れば 周りの物体にぶつからずに走り抜け. 高精度3次元 地図データベース (逐次更新). 今後走る場所の情報(走行開始前にDL可). られるのか「判断」する.さらに,周 通信は頻繁には 発生しない. 囲も動く中,自分も動きながら“交 通法規を考慮し”走行経路を決定し,. 統計処理・予測 ビッグデータ ディープラーニング 通信: 携帯網,DSRC等. プローブデータ (1分,1時間,1日,1週間,1カ月前....). その経路上をどこまで加速,減速し,. 過去. どこで操 舵し正 確に走るのか 計算 し,結果を運転「操作」として ECU やアクチュエータに直接入力し続け て走る.ぶつかりそうな状況になれ ば,ダメージを最低限にするための 回避行動をシステムが指示する.こ. 200m以上先の地点. 図 -2 Vehicle IoT で見えない世界の情報を収集する. れらは人間で言えば脳が行う.大脳に近い判断と小. 決するアルゴリズムを人間が手作業で逐一プログラミ. 脳的な指示をシステムが代行する必要があり,ここで. ングするのは,現実的に不可能だ.人間の能力を超. 人工知能的な役割が入ってくる.. えるカメラやセンサの搭載が進み,収集すべきデータ. 今日,障害物に当たらない経路を算出する際には. が増えて,通信も発達した.コンピュータの計算能力. ルールベースやリスクポテンシャルに基づき,スプライ. も圧倒的に向上した.しかし,それらを統合的に処. ン曲線やクロソイド曲線を利用して経路を複数作成し,. 理するアルゴリズム開発が自動運転実用化に向けた. そこから最適解を確率論的に決定し,それに沿って走. ボトルネックとなる.こうした中,問題の打開策とな. るように加速,減速,操舵といった「操作」に変換し. り得るのがディープラーニングであり,中でも深層強. 最適な走行を実現する.. 化学習によって,人間の開発より早く走行アルゴリズ. 実はこれでも人間にまったく違和感のない走行を実. ムの生成や最適化が可能になるものと期待される.デ. 現するには限界がある.実際,自動運転車が他の車両. ータセンタで最適化されたアルゴリズムをダウンロー. や人間に及ぼすリスクを最小限にして走行するには,定. ドしコンピュータにのせれば人間が運転しているかの. 常的走行時はもとより,高速道路での入線や渋滞追. ごとく,さらには,それより上手く走る可能性がある.. 従,追い越しのみならず,一般道路の交差点内において,. もちろん,ディープラーニングは万能でないが,実は. 周囲のドライバーや歩行者等の想定や期待からも,自. クルマはその最適な適用分野だ.ディープラーニング. 動運転車が人間が運転するクルマと同じように走行しな. には計算の対象となる大量のデータが必要であり,ク. ければ,タイミング等が合わず事故の原因ともなり得る.. ルマはデータの宝庫でもある.国内クルマメーカの中 には,ベンチャー企業への出資を通じて, ディープラー. * ディープラーニングで最適な走行アルゴリズ. ニングの開発促進に取り組む動きも出てきている.ま. ムを突き止める. た,自動運転の実現やその継続的な情報支援とアル. こうしたことを解決するのも走行アルゴリズムに依. ゴリズム改善のため,クラウドにデータをアップロー. 存する.高速道路ならば車線をキープし,前のクルマ. ドし分析・改善し続ける必要がある.こうしたデータ. との距離を維持し,追い越しと入線を安全に実現で. の流れを構築するために,海外では Vehicle IoT を利. きればよいが,一般道では問題がきわめて複雑にな. 用して自動運転を支援する環境整備が進んでいる.. る.一般道は各国で交通ルールも異なり,地域の暗. 将来的には運転の「うまい」ドライバーの運転特. 黙の了解といったものもある.世界中の多様な走行. 性などをモデル化し,より良いトレーニングデータ. 条件下でどこでも走り抜けるためにあらゆる課題を解. をディープラーニングで深層強化学習し,周りの人. 情報処理 Vol.57 No.5 May 2016. 439.
(5) 特集 自動運転システムにおける情報処理技術の最新動向. 間やクルマがこういう風に動いてい るから,こういう風に走り抜けるのが. 環境認識. 上に「うまい」走行アルゴリズムを生. 照. 高精度3次元 地図データベース (逐次更新). 他サービスへAPI. ト 走行 デー アルゴリズム プ 強化学習 ッ 分ア 差 適宜アップデート 参. 成する研究開発が必要になる. 今後,走行アルゴリズムの良し悪し. 提供. 正しいといったことを学習し,人間以. 走行状態把握. は,重要な競争要因になり得る.たと えば Level 3 の半自動運転においても,. 第三者サービス提供者. ドライバーが運転している間にその運 転をシステムが学習し,自動運転時 には可能な限り,追い越しや交差点. 地図会社. での右左折などそのドライバーであれ ばどう運転するのか,法規の範囲で. トランス ポーテーション 他交通 サービス事業者 機関. 公共 機関. エネルギー 会社. 図 -3 環境情報を API 化して第三者のサービスに提供する. 再現するようなアルゴリズムが実現す れば,ユーザの満足度も高まる.そうした走行アルゴ. を第三者サービスに API として提供することで,ロ. リズムのソフトウェア的な開発は自動運転車のハード. ボットタクシーといった新たな事業やサービスが創. ウェア的な開発と切り離して考えることが必要である.. 出されることも期待される(図 -3). 欧州では睡眠を取りながら長距離移動する自動運. * 自動運転の可能性 : 自動運転は新市場の開. 転が,ビジネスホテル業界や航空業界に大きな打撃. 拓に向けた“起爆剤”. を与えるといった話もある.逆にその結果,ホテル. ここまでの話をまとめると,自動運転車はセンサ. 業界や航空業界で業態が変化して,たとえばデリバ. を持って環境認識をする.そして,自分の ECU の. リー型ホテルといった,これまでにない,まったく. 状況を分析して走行状態を把握する.これらに加え. 新たなサービス事業を生むかもしれない.もちろん,. て高精度 3 次元地図データベースを参照する.参照. 同じ技術を適用し,流通業界やタクシー,トラック,. した地図が現状と違うとすれば差分をアップロード. バスなど商用車業界でも効率的で安全なサービス提. する.不特定多数のクルマが差分を報告すれば,経. 供や新事業拡大などの可能性が大いに期待できる.. 時的な変化も考慮し統計的処理を経て地図データベ. 世界的に自動運転がこれほど注目を集め,官民学. ースを随時アップデートする.. が協力して研究開発に力を入れている理由は,自動. また,すべてのクルマからデータを取る必要はない. 運転が多くの産業で技術的に大きな波及効果を持つ. が,カメラ映像や点群を正確なセンサを持っているク. からだ.それだけでなく,その技術の実現が社会構. ルマや「うまい運転(車)」から各種データを取得し,. 造や経済発展にきわめて大きな影響を与える可能性. それをクラウド上でディープラーニングし続け,走行ア. もある.情報や人,モノの動きは経済活動の根幹で. ルゴリズムを高度化する.その結果で適宜(年に 1 回,. あり,自動運転の実現はそれらを根本的に変化させ,. 3 カ月に 1 回,毎月など)クルマをアップデートする.. 新たな巨大市場を生む『起爆剤』となり得る. (2016 年 3 月 4 日受付). こうした一連のデータの流れも Vehicle IoT を利用し, さらにこのサイクルを回し続ける必要がある.. 野辺継男 [email protected]. さらにその結果として生まれる,データベースを. 1983 年 NEC 入社.国内外のパソコン開発に従事.2000 年オンラ インゲーム会社立上げ CEO.2004 年日産自動車入社,クルマの ICT 化に従事.2012 年インテル入社,Vehicle IoT および自動運転に従事. 2014 年名古屋大学客員准教授兼務.現在に至る.. 参照すれば,クルマが動いている場所の白線や天気 などさまざまな環境情報が得られる.そうした情報. 440. 情報処理 Vol.57 No.5 May 2016.
(6)
図
関連したドキュメント
[r]
私たちの行動には 5W1H
自動運転ユニット リーダー:菅沼 直樹 准教授 市 街 地での自動 運 転が可 能な,高度な運転知能を持 つ自動 運 転自動 車を開 発
が作成したものである。ICDが病気や外傷を詳しく分類するものであるのに対し、ICFはそうした病 気等 の 状 態 に あ る人 の精 神機 能や 運動 機能 、歩 行や 家事 等の
平均車齢(軽自動車を除く)とは、令和3年3月末現在において、わが国でナン バープレートを付けている自動車が初度登録 (注1)
J-STAGEの運営はJSTと発行機関である学協会等
ポンプの回転方向が逆である 回転部分が片当たりしている 回転部分に異物がかみ込んでいる
2)海を取り巻く国際社会の動向
