令和元年度 修士論文
電磁波群遅延特性を用いた
金属管内の異物検出法
指導教員 本島 邦行 教授
群馬大学大学院理工学府 理工学専攻
電子情報・数理教育プログラム
学籍番号 t181d055 長谷川 勇気
目次
1 序論 ... 1 2 関連理論 ... 2 2.1 S パラメータ ... 2 2.2 円形導波管の電界分布 ... 4 2.3 遮断周波数 ... 5 2.4 位相速度と群速度 ... 6 2.4.1 位相速度... 6 2.4.2 群速度 ... 6 2.5 波長短縮 ... 7 2.6 電磁波の位相特性 ... 7 2.7 群遅延 ... 7 2.8 群遅延差分 ... 9 3.実験環境 ... 11 3.1 ベクトルネットワークアナライザ(VNA) ... 11 3.2 GUI アプリケーション ... 12 3.3 金属管 ... 13 3.3.1 直線型金属管 ... 13 3.3.2 U 字金属管 ... 14 3.3.3 T 字型金属管 ... 15 3.4 入射方式 ... 16 3.4.1 同軸導波管変換器、矩形円形変換器 ... 16 3.4.2 直線型プローブ ... 17 3.5 異物 ... 18 3.5.1 石粉粘土... 18 3.5.2 スライム... 19 3.6 評価方法 ... 19 4. 実験結果 ... 20 4.1 直線型金属管 ... 20 4.1.1 入射方式:矩形円形変換器 ... 21 4.1.2 入射方式:プローブ ... 23 4.2 U 字型金属管 ... 25 4.2.1 入射方式:矩形円形変換器 ... 26 4.2.2 入射方式:プローブ ... 27 4.3 T 字型金属管(1 回分岐) ... 294.3.1 入射方式:矩形円形変換器 ... 30 4.3.2 入射方式:プローブ ... 32 4.4 2 回分岐金属管 ... 34 4.4.1 入射方式:矩形円形変換器 ... 36 4.4.2 入射方式:プローブ ... 44 4.5 変換器とプローブの比較... 50 5. まとめ ... 52 5.1 結論 ... 52 5.2 今後の課題 ... 52 6. 謝辞 ... 53 7. 参考文献 ... 54 研究業績 ... 55
1
1 序論
地熱発電所や温泉などの施設で使用されている金属管の配管設備は,長期使用によりス ケールなどの異物が発生し、管を閉塞することで重大な事故を引き起こす可能性があるた め,定期的な異物検査が必要である。 金属管における異物検査法の一般的な手法には,放射線を用いた手法(1)による金属管内の 可視化や,工業用内視鏡を用いた目視での確認などがある。これらは,精度よく管の異物を 検出できるが,放射線を用いた手法は放射線の扱いが難しいという欠点があり,工業用内視 鏡を用いた手法は内視鏡を挿入する際に、金属管を一部分解体する必要があるために非破 壊による検査ができないという欠点がある。また,これらの手法に共通して,管全体の検査 をする場合に膨大な手間と時間を要する。 本手法では円形導波管に見立てた金属管内に電磁波を伝搬させ,伝送特性の群遅延を解 析することで管内の異物を検出することを目的とする。本手法では,管長に関わらず短時間 で管内部の異物検出が可能となり,管が壁などの内部を通っているような場所であっても 計測が可能である。また,熱交換器などの湾曲部を多数持つ複雑な配管であっても検査可能 である。 今日までに,電磁波を用いた金属管内検査法に関する技術的報告(2)~(4)がされている。ま た,著者らも過去に電磁波を用いた金属管内検査法に関する技術的報告(5)~(9) をしている。 しかし,従来の手法(5)~(9)では,反射波の時間波形を用いて異物検出を行っていたため,異物 までの距離は推定可能であるが,金属管が分岐している場合には分岐による反射波が生じ るため,異物が存在する経路までは推定できず,不完全であった。 本稿では,位相特性から求められる「群遅延」を用いた新たな異物検出法を提案する。本 手法は分岐金属管であっても,異物が存在する経路を推定することができるため,電磁波を 用いた金属管内検査法の汎用化が期待される。しかし,手法では異物までの距離を推定する ことができないため,分岐金属管の異物検出を行うには先行研究(6)の手法と併用する必要が ある。2
2 関連理論
本章では、本研究を進めるにあたって必要な理論について記述する。 2.1 S パラメータ S パラメータとは、高周波回路や高周波電子部品の特性を表す回路パラメータである。こ れらは回路網の反射特性、伝送特性を表している。 図 2.1.1 2 端子対回路網 図 2.1.1 のような 2 端子対回路網でよく使用され、入力側の端子対を Port1、出力側を Port2 とすると次のように定義される。 [𝑏𝑏1 2] = [ 𝑆11 𝑆12 𝑆21 𝑆22] [ 𝑎1 𝑎2] (2.1.1) 式(2.1.1)の𝑆11, 𝑆21, 𝑆12, 𝑆22は次のような意味を持つ。 ・𝑺𝟏𝟏Port1 から Port1 への反射係数を表している。絶対値のデシベル表示は Port1 の反射損失を 表している。 𝑆11= 𝑏1 𝑎1 | 𝑎2=0 反射損失 𝑅𝐿 = −20 log10|𝑆11| (2.1.2)
3 ・𝑺𝟐𝟏
Port1 から Port2 への伝送係数を表している。絶対値のデシベル表示は Port1 から Port2 へ の挿入損失を表している。 𝑆21= 𝑏2 𝑎1 | 𝑎2=0 挿入損失 𝐼𝐿 = −20 log10|𝑆21| (2.1.3) ・𝑺𝟏𝟐
Port2 から Port1 への伝送係数を表している。絶対値のデシベル表示は Port2 から Port1 へ の挿入損失を表している。 𝑆12= 𝑏1 𝑎2 | 𝑎1=0 (2.1.4) ・𝑺𝟐𝟐
Port2 から Port2 への反射係数を表している。絶対値のデシベル表示は Port2 の反射損失を 表している。 𝑆22= 𝑏2 𝑎2 | 𝑎1=0 (2.1.5) 式(2.1.1)~(2.1.5)より、それぞれ対応する入射波(𝑎1, 𝑎2)を代入すれば、反射波や入射波 を計算することができる。従来の手法(5)~(9)においては、反射係数𝑠 11より求められる反射波 の振幅特性を用いて異物検出を行っていたが、本手法は伝送係数𝑆21から求められる位相特 性を用いる。
4 2.2 円形導波管の電界分布 図 2.2.1 円筒座標系 円形導波管内の電磁界は、管軸方向に特有の形態を持ち、𝑇𝐸𝑚𝑛モードと𝑇𝑀𝑚𝑛モードとい う 2 つのモードで表現される。𝑇𝐸𝑚𝑛モードは、電波の進行方向には電界成分を持たず、管 軸方向と垂直な方向に電界成分を持つ。その電界変化により、管軸方向と垂直な方向に磁界 成分を持つ。𝑇𝑀𝑚𝑛モードは、電波の進行方向(管軸方向)に電界成分を持ち、その電界変 化によって、管軸方向に磁界成分を持つ。ここで、図 2.2.1 のように円筒座標系を(r, ϕ, z)と 定めると、𝑇𝐸𝑚𝑛モードの各電磁界成分は、 𝐸𝑟= 𝑗𝐻𝑚𝑛 𝜔𝜀 𝑘02− 𝑘 𝑧2 𝑚 𝑟 𝐽𝑚( 𝑗𝑚𝑛′ 𝑅 𝑟) { 𝑠𝑖𝑛(𝑚𝜃) −𝑐𝑜𝑠(𝑚𝜃) (2.2.1) 𝐸𝜃 = 𝑗𝐻𝑚𝑛 𝜔𝜀 𝑘02− 𝑘 𝑧 2 𝑗𝑚𝑛′ 𝑅 𝐽𝑚 ′ (𝑗𝑚𝑛 ′ 𝑅 𝑟) { 𝑐𝑜𝑠(𝑚𝜃) 𝑠𝑖𝑛(𝑚𝜃) (2.2.2) 𝐸𝑧= 0 (2.2.3) 𝐻𝑟= −𝑗𝐻𝑚𝑛 𝑘𝑧2 𝑘02− 𝑘 𝑧2 𝑗𝑚𝑛′ 𝑅 𝐽𝑚 ′ (𝑗𝑚𝑛 ′ 𝑅 𝑟) { 𝑐𝑜𝑠(𝑚𝜃) 𝑠𝑖𝑛(𝑚𝜃) (2.2.4) 𝐻𝜃= 𝑗𝐻𝑚𝑛 𝑘𝑧2 𝑘02− 𝑘 𝑧 2 𝑚 𝑟𝐽𝑚( 𝑗𝑚𝑛′ 𝑅 𝑟) { 𝑠𝑖𝑛(𝑚𝜃) −𝑐𝑜𝑠(𝑚𝜃) (2.2.5) 𝐻𝑧= 𝐻𝑚𝑛𝐽𝑚( 𝑗𝑚𝑛′ 𝑅 𝑟) { 𝑐𝑜𝑠(𝑚𝜃) 𝑠𝑖𝑛(𝑚𝜃) (2.2.6) m,n:整数、 𝐻𝑚𝑛:𝑇𝐸𝑚𝑛モードの係数、 𝑅:円形導波管の半径
5 𝐽𝑚:m 次 Bessel 関数、𝐽𝑚′ :一階微分した m 次 Bessel 関数、𝑗mn′ :𝐽𝑚′ の n 番目の根 𝑘0= ω√με:波数、 𝑘𝑧 = √𝑘02− ( 𝑗𝑚𝑛′ 𝑎 ) 2 :𝑇𝐸𝑚𝑛モードの z 軸方向の波数 となる。次に、𝑇𝑀𝑚𝑛モードの各電磁界成分は、 𝐸𝑟= −𝑗𝐸𝑚𝑛 𝑘𝑧 2 𝑘02− 𝑘𝑧2 𝑗𝑚𝑛 𝑅 𝐽𝑚 ′ (𝑗𝑚𝑛 𝑅 𝑟) { 𝑐𝑜𝑠(𝑚𝜃) 𝑠𝑖𝑛(𝑚𝜃) (2.2.7) 𝐸𝜃 = 𝑗𝐸𝑚𝑛 𝑘𝑧 2 𝑘02− 𝑘𝑧2 𝑚 𝑟 𝐽𝑚( 𝑗𝑚𝑛 𝑅 𝑟) { 𝑠𝑖𝑛(𝑚𝜃) −𝑐𝑜𝑠(𝑚𝜃) (2.2.8) 𝐸𝑧 = 𝐸𝑚𝑛𝐽𝑚(𝑗𝑚𝑛 𝑅 𝑟) { 𝑐𝑜𝑠(𝑚𝜃) 𝑠𝑖𝑛(𝑚𝜃) (2.2.9) 𝐻𝑟= −𝑗𝐸𝑚𝑛 𝜔𝜀 𝑘02− 𝑘 𝑧2 𝑗𝑚𝑛 𝑅 𝐽𝑚 ′ (𝑗𝑚𝑛 𝑅 𝑟) { −sin(𝑚𝜃) cos(𝑚𝜃) (2.2.10) 𝐻𝜃= −𝑗𝐸𝑚𝑛 𝜔𝜀 𝑘02− 𝑘 𝑧2 𝑗𝑚𝑛 𝑅 𝐽𝑚 ′ (𝑗𝑚𝑛 𝑅 𝑟) { cos(𝑚𝜃) sin(𝑚𝜃) (2.2.11) 𝐻𝑧= 0 (2.2.12) 𝐸𝑚𝑛:𝑇𝑀𝑚𝑛モードの係数、 𝑗mn:𝐽𝑚の n 番目の根 𝑘𝑧 = √𝑘02− ( 𝑗𝑚𝑛 𝑎 ) 2 :𝑇𝑀𝑚𝑛モードの z 軸方向の波数 2.3 遮断周波数 遮断周波数とは,円形導波管でモードが伝搬する最低周波数である。遮断周波数は,管内 の電磁波伝搬モードによって異なり, TE モードの遮断周波数𝑓𝑐_𝑇𝐸は式(2.3.1)、 TM モー ドの遮断周波数𝑓𝑐_𝑇𝑀は式(2.3.2)で与えられる。 𝑓𝑐_𝑇𝐸= 𝑗𝑚𝑛′ 2𝜋𝑅√𝜀𝜇 (2.3.1) 𝑓𝑐_𝑇𝑀 = 𝑗𝑚𝑛 2𝜋𝑅√𝜀𝜇 (2.3.2) 𝜀:管内の誘電率、 𝜇:管内の透磁率 本稿では、内径 28mm の金属管を用いる。表 2.3.1 に内径 28mm の円形導波管における各 モードの遮断周波数を示す。
6 表 2.3.1 内径 28mm の円形導波管における各モードの遮断周波数 TE モード 𝑇𝐸11 𝑇𝐸01 𝑇𝐸31 𝑇𝐸41 遮断周波数[GHz] 6.274 10.41 14.32 18.17 TM モード 𝑇𝑀01 𝑇𝑀11 𝑇𝑀21 𝑇𝑀02 遮断周波数[GHz] 8.196 13.06 17.50 18.81 このように、各モードの遮断周波数は異なるので、測定する周波数帯を限定することによ って、指定したモードだけを伝搬させることができる。 2.4 位相速度と群速度 円形導波管内を伝搬する波は群速度によって伝搬する。群速度を用いることによって、 2.8 節で後述する群遅延の理論値を求めることができる。 2.4.1 位相速度 位相速度𝑣𝑝は波の山などの特定の位置が移動する速度のことである。位相速度は以下の ような式で与えられる。 𝑣𝑝= 𝜔 𝑘 (2.4.1) 式(2.5.1)に TE,TM モードの波数𝑘𝑧を代入すると ・TE モードの位相速度 𝑣𝑝_𝑇𝐸= 𝜔 √𝑘02− ( 𝑗𝑚𝑛′ 𝑅 ) 2 (2.4.2) ・TM モードの位相速度 𝑣𝑝_𝑇𝑀= 𝜔 √𝑘02− ( 𝑗𝑚𝑛 𝑅 ) 2 (2.4.3) 2.4.2 群速度 群速度𝑣𝑔とは、複数の波を重ね合わせた時の波が移動する速度のことである。群速度は以 下の式で与えられる。 𝑣𝑔(𝑓) = 𝑑𝜔 𝑑𝑘 = 𝑐√1 − ( 𝑓𝑐_𝑚𝑜𝑑𝑒 𝑓 ) 2 𝑓𝑐_𝑚𝑜𝑑𝑒 :各モードの遮断周波数 𝑓:周波数 (2.4.4)
7 2.5 波長短縮 波長短縮とは、空気以外の物質に高周波を流した際、波長が短くなり、伝搬速度が遅く なるという特性を表す。その短縮率は物質の比誘電率に依存する。この短縮率は波長短縮 率といい、式(2.5.1)で与えられる。
𝑣 =
1
√𝜀
𝜀 ∶ 物質の比誘電率 (2.5.1) 2.6 電磁波の位相特性 本手法では、計測によって得られた伝送特性(𝑆12または𝑆21)から得られる位相特性𝜙(𝑓) を利用する。位相特性は以下の式で与えられる。 𝜙(𝑓) = tan−1[𝐼𝑚{𝑆21(𝑓)} 𝑅𝑒{𝑆21(𝑓)} ] (2.6.1) 2.7 群遅延 群遅延𝑇𝑔𝑑は、位相の周波数微分で定義される。群遅延は以下のような式で与えられる。 𝑇𝑔𝑑(𝑓) = −𝑑𝜙(𝑓) 𝑑𝑓 (2.7.1) ここで、𝑑𝜙(𝜔)は離散的なデータであるため、以下のように微分する。 𝑇𝑔𝑑(𝑓) = −𝜙(𝑓 + 𝑑𝑓) − 𝜙(𝑓 − 𝑑𝑓) 2𝑑𝑓 𝑑𝑓:周波数ステップ (2.7.2) 本手法では、異物による群遅延の変動を読み取ることで異物を検出する。図 2.7.1 に群遅延 が変動する仕組みを示す。
8 図 2.7.1 群遅延に変動がする仕組み まずは、「異物が無い場合」について説明する。基本モードであるTE11モードの遮断周波数 6.274GHz(表 2.3.1 より)以上の周波数において、電磁波は入射側から終端まで妨げられ ることなく伝搬する。そのため、伝送特性𝑆21の位相はのこぎり波のような形になり、その 傾きを表す群遅延は殆ど変動しない。続いて、「異物がある場合」では、管内に異物がある ことによって内径が小さくなり、遮断周波数が増加する。また、異物を通過することによっ て波長短縮が起きる。そのため、電磁波の伝搬が妨げられてしまう。よって、群遅延が変動 する。本手法では、このような群遅延の変動を読み取ることによって、異物を検出する。
9 群遅延を用いる利点としては、以下の 2 つがある。 ・位相には不定性(ϕと2𝜋𝑛 + 𝜙が同じ値に見える)があるため、その傾きを表す群遅延は、 周波数に依存した位相変化を視覚的に分かりやすくとらえることができる。また、閾値を明 確に設定することができる。 ・先行研究(5)~(9)とは違い、電磁波の振幅ではなく位相を用いるため、長距離による減衰や、 分岐による減衰などに影響されにくい。また、分岐部による反射の影響を受けない。 2.8 群遅延差分 今回の評価は、群遅延の測定値𝑇𝑔𝑑_𝑒𝑥と理論値𝑇𝑔𝑑_𝑡ℎの差分をとった、「群遅延差分 𝑇𝑔𝑑_𝑑𝑖𝑓𝑓𝑒𝑟𝑒𝑛𝑐𝑒」によって行う。理論値と群遅延差分は以下のような式で与えられる。 𝑇𝑔𝑑_𝑡ℎ(𝑓) = 𝑙 𝑣𝑔(𝑓) 𝑙:ポート間の伝搬距離 (2.8.1) 𝑇𝑔𝑑_𝑑𝑖𝑓𝑓𝑒𝑟𝑒𝑛𝑐𝑒(𝑓) = |𝑇𝑔𝑑_𝑒𝑥− 𝑇𝑔𝑑_𝑡ℎ| (2.8.2) 以上の式より求められた群遅延差分のグラフは下図のようになる。本稿では理論値を求め るとき𝑇𝐸11モードの群速度を用いる。 図 2.8.1 群遅延差分の導出(グラフ)
10 群遅延差分を用いることによって、次のような利点が得られる。 ・先行研究(5)~(9)では、「検査対象の金属管」と「同形で異物の無い金属管」の測定値を比較 して行っていたが、今回は「検査対象の金属管」との比較に理論値を用いているため、「検 査対象の金属管」のみで検査を行える。 ・理論値と差分をとることで、群遅延に変動が生じない部分が 0ns に固定され、閾値の設定 が簡単になる。
11
3.実験環境
3.1 ベクトルネットワークアナライザ(VNA) 本実験に用いるベクトルネットワークアナライザ(Hewlett Packard 製、型番 8720D)の 写真を図 3.1.1 に、実験の様子を表した写真を図 3.1.2 に示す。。 図 3.1.1 実験に用いる VNA 図 3.1.2 実験の様子 実験では、金属管の測定したい経路の両端に VNA を接続し、S パラメータを測定する。こ こで得られた𝑆21より、群遅延差分を導出する。12 3.2 GUI アプリケーション
自動計測用の GUI アプリケーション「GIN(Graphical Interface for vNa HP8720D)」を 開発した(平成 29 年、著者作)。図 3.2.1 に GIN の画面を示す。 図 3.2.1 GIN のスクリーンショット このアプリケーションは、VNA を GPIB 通信によって制御する。通信環境を図 3.2.2 に示 す。 図 3.2.2 通信環境 GIN によって VNA から吸い出した S パラメータから様々なパラメータ(インピーダンス や反射波、群遅延)を自動計算することができる。
13 3.3 金属管 本実験では、内径 28mm、外径 32mm の円形金属管を用いる。円形金属管の写真を図 3.3.1 に示す。 図 3.3.1 金属管 本実験では、以下のような 3 種類の金属管で異物検出を行う。 3.3.1 直線型金属管 写真と寸法を図 3.3.2 に示す。 図 3.3.2 直線型金属管
14 長さは 150mm と 300mm のものを用意した。この 2 つと後述の金属管を組み合わせて、 様々な長さ、形状の金属管を作ることができる。 3.3.2 U 字金属管 写真と寸法、直線型金属管との組み合わせを図 3.3.3 に示す。 図 3.3.3 U 字金属管 U 字型金属管は、単体では短いため直線型金属管と組み合わせて用いる。U 字管単体の長 さは2×75×π 2 + 100 ≅ 336𝑚𝑚とする。
15 3.3.3 T 字型金属管 写真と寸法を図 3.3.4 に示す。 図 3.3.4 T 字型金属管 T 字型金属管は、2 つの直線型金属管を溶接して作られており、分岐部は滑らかな円形を維 持している。図 3.3.4(c)のように、2 つ組み合わせて分岐を増やすこともできる。
16 3.4 入射方式 本実験では、2 つの入射方式を用いる。 3.4.1 同軸導波管変換器、矩形円形変換器 1 つ目は、同軸導波管変換器(サンケン電気製、型番:STW-100,周波数範囲 8.2GHz~ 12.4GHz)と矩形円形変換器を用いた入射方式である。同軸導波管変換器から電磁波を入射 し、矩形円形変換器によって同軸導波管変換器の矩形型から、金属管に合わせた円形型へと 変換して電磁波を伝搬させる。図 3.4.1 に変換器の写真、寸法を示す。 図 3.4.1 変換器 この入射方式では、金属管接続部からプローブまでの距離が 175mm であるため、電磁波の 伝搬距離は「金属管の長さ+350mm」とする。また、測定帯域は 8.2~10GHz とする。8.2GHz 以下は同軸導波管変換器の周波数範囲によって使うことができず、10GHz 以上は表 2.3.1 より高次モードが発生してしまうため、この帯域とした。
17 3.4.2 直線型プローブ 2 つ目は、プローブ挿入用の金属管と直線型プローブ(長さ 7.75mm)を用いた入射方式 である。直線型プローブの写真を図 3.4.2 に示す。 図 3.4.2 直線型プローブ 本実験では、測定したい経路の両端にプローブ挿入用の金属管を接続し、そこに給電用プロ ーブを挿入する。同様に、測定しない経路の終端には終端用プローブを挿入する。終端用 50 Ω抵抗は、終端からの反射波をおさえ、別の経路に影響を及ぼさないようにする役割がある。 この入射方式では、プローブ挿入用金属管の端からプローブまでの距離が 100mm であるた め、電磁波の伝搬距離は「金属管の長さ+200mm」とする。また、測定帯域は基本モード が励振している 6GHz~10GHz とする。
18 3.5 異物 3.5.1 石粉粘土 本実験で用いる異物として、主成分がタルクで構成されている石粉粘土を採用した。石粉 粘土の写真や寸法、金属管へ挿入する様子、想定している異物(スケール)を図 3.5.1 に示 す。 図 3.5.1 石粉粘土 この異物は、図 3.5.1(c)のような実際の配管設備に発生するシリカスケールを想定している。 シリカスケールとは、水に含まれるシリカが熱や圧力により,ケイ酸マグネシウムなどのケ イ酸塩として管の内壁に析出することで管を詰まらせる異物である。よって,殆どの金属管 で発生する恐れがある。また,シリカは高温の水に対する溶解度が極めて大きいため、温泉 地や地熱発電プラントに発生しやすい特徴がある(10)。4 章の実験では、基本的に水を充分含 ませたものを用いるが、4.1.1 項では乾燥させたものも用いる。
19 3.5.2 スライム 本実験に用いる異物としてスライムを採用した。スライムを金属管へ入れる様子を表し た写真を図 3.5.2 に示す。 図 3.5.2 スライム 今回用いたスライムは、お湯と PVA 洗濯のり、ホウ砂飽和水溶液を 1:1:0.2 の割合で混 ぜたものである。この異物は、4.1.1 項において金属管が水で満たされている状態を再現す るために用いる。 3.6 評価方法 異物検出の評価は、実験から得られた群遅延差分に閾値を設けることで行う。本実験での 閾値は 150ns とする。この閾値は経験則に則って設定した。異物が無い経路であっても最 大 120ns ほどの群遅延差分が発生するため、150ns を閾値とした。群遅延差分に 150ns 以 上の変動が発生した場合、測定した経路上に異物が存在するとみなす。それに対し、変動が 発生しなかった場合、測定した経路上に異物は存在しないとみなす。
20
4. 実験結果
本章では、実験結果から得られた群遅延差分のデータを評価していく。また、各入射方式 における VNA の設定を表 4.1 に示す。 表 4.1 VNA の設定 測定周波数[GHz] データポイント数 変換器 8.2~10 1601 プローブ 6.0~10 3202 4.1 直線型金属管 実験環境を表 4.1.1 に、異物の挿入位置を表した図を図 4.1.1 に示す。 表 4.1.1 実験環境 入射方式 変換器 プローブ パラメータ 伝搬距離 650mm(石粉粘土) 800mm(スライム) 500mm 異物 石粉粘土(含水、乾燥) スライム 石粉粘土(含水) 図 4.1.1 異物挿入位置 図 4.1.1 で表した金属管の a 端と b 端に変換器やプローブを装着して測定を行う。石粉粘21 土は図 3.5.1 のものを 2 つつなげ、長さを 100mm にして挿入する。また、図 4.1.1(b)のよ うにスライムは長さ 150mm の金属管を完全に満たした状態で用いる。 4.1.1 入射方式:矩形円形変換器 本項では、以下の 3 つの異物を用いる。 ・石粉粘土(含水) ・石粉粘土(乾燥) ・スライム 石粉粘土(含水、乾燥)によって、異物に含まれる水分量が群遅延にもたらす影響を調べる。 また、スライムでは金属管に水を満たした状態を再現し、水で満たされている金属管におい て本手法が有効であるかを調べる。本項では、 (a)異物を挿入しない場合 (b)石粉粘土(含水)を挿入した場合 (c)石粉粘土(乾燥)を挿入した場合 (d)スライムを挿入した場合 の4パターンで実験を行った。経路 a→b の伝送特性より求めた群遅延差分のグラフを図 4.1.2 に示す。 (a) 異物無し (b) 石粉粘土(含水)
22 (c) 石粉粘土(乾燥) (d) スライム 図 4.1.2 金属管:直線型金属管、入射方式:変換器 の場合における群遅延差分 閾値 150ns による評価を表 4.1.2 に示す。 表 4.1.2 閾値による評価 閾値を超える:○ 超えない:× (a)異物無し × (b)石粉粘土(含水) ○ (c)石粉粘土(乾燥) × (d)スライム ○
23 これらの結果より、以下の 2 つのことが考えられる。 ・異物に含まれる水分が群遅延差分に影響を与える 図 4.1.2(b)、(c)を比較すると、明らかに群遅延差分の変動に違いがある。石粉粘土に含 まれる水分量以外の条件は同じであるため、水が群遅延差分の変動を起こしていると考え られる。水が群遅延差分の変動を起こす原因としては、その誘電率による波長短縮が考えら れる。石粉粘土の主成分であるタルクは比誘電率 1.8、水の比誘電率は 81 であるため、異 物の含水量は波長短縮率に大きな影響を与える。そのため、比誘電率が低い石粉粘土は電磁 波の伝搬に殆ど影響を与えず、水を含む石粉粘土は電磁波の伝搬を妨げる。よって、今回想 定しているシリカスケール以外の異物であっても、水を含んでいるものであれば本手法に よる異物検出が有効であると考えられる。 ・管が水で満たされている状態では、本手法は無効である 図 4.1.2(d)の結果より、金属管をスライムで満たしたときに群遅延差分の変動が発生して いるため、本手法を用いるためには排水をしてから検査を行う必要がある。 4.1.2 入射方式:プローブ 本項では、 (a)異物を挿入しない場合 (b)石粉粘土(含水)を挿入した場合 の 2 パターンで実験を行った。経路 a→b の伝送特性より求めた群遅延差分のグラフを図 4.1.3 に示す。 (a) 異物無し
24 (b) 石粉粘土(含水) 図 4.1.3 金属管:直線型金属管、入射方式:プローブ の場合における群遅延差分 本項では、7~9.5GHz の範囲で評価を行っていく。図 4.1.3 の結果より、異物の有無によ って群遅延差分の変動が異なっている。よって、本手法は入射方式をプローブとした場合 でも異物検出が可能であると考えられる。
25 4.2 U 字型金属管 実験環境を表 4.2.1 に、異物の挿入位置を表した図を図 4.2.1 に示す。 表 4.2.1 実験環境 入射方式 変換器 プローブ パラメータ 伝搬距離 1286mm 1136mm 異物 石粉粘土(含水) 石粉粘土(含水) 図 4.2.1 異物の配置図 4.1 節と同様に、a 端、b 端に変換器やプローブを装着して実験を行う。本節では、 (a)異物位置 A へ異物を挿入する場合 (b)異物位置 B へ異物を挿入する場合 (c)異物を挿入しない場合 の 3 パターンで実験を行った。
26 4.2.1 入射方式:矩形円形変換器 経路 a→b の伝送特性より求めた群遅延差分のグラフを図 4.2.2 に示す。 (a) 異物位置 A (b) 異物位置 B (c) 異物無し 図 4.2.2 金属管:U 字型金属管、入射方式:矩形円形変換器 の場合における群遅延差分 閾値 150ns による評価を表 4.2.2 に示す。 表 4.2.2 閾値による評価 閾値を超える:○ 超えない:× (a)異物位置 A ○ (b)異物位置 B ○ (c)異物無し ×
27 図 4.2.2 と表 4.2.2 より、測定経路上における異物の有無によって、群遅延差分の変動が異 なっている。このことから、U 字型金属管において本手法は有効であると考えられる。ま た、図 4.2.2(a),(b)の結果より本手法は管の湾曲による影響を受けずに異物検出が可能であ る。 4.2.2 入射方式:プローブ 経路 a→b の伝送特性より求めた群遅延差分のグラフを図 4.2.3 に示す。 (a) 異物位置 A (b) 異物位置 B (c) 異物無し 図 4.2.3 金属管:U 字型金属管、入射方式:プローブ の場合における群遅延差分
28 本項では、7.5~9.5GHz の範囲で評価を行う。閾値による評価を表 4.2.3 に示す。 表 4.2.3 閾値による評価 閾値を超える:○ 超えない:× (a)異物位置 A ○ (b)異物位置 B ○ (c)異物無し × 図 4.2.3、表 4.2.3 の結果より、異物の有無によって群遅延差分の変動が異なっているた め、入射方式がプローブの場合において異物検出が可能であると考えられる。また、プロ ーブを用いた場合でも金属管の湾曲に関係なく異物を検出できる。
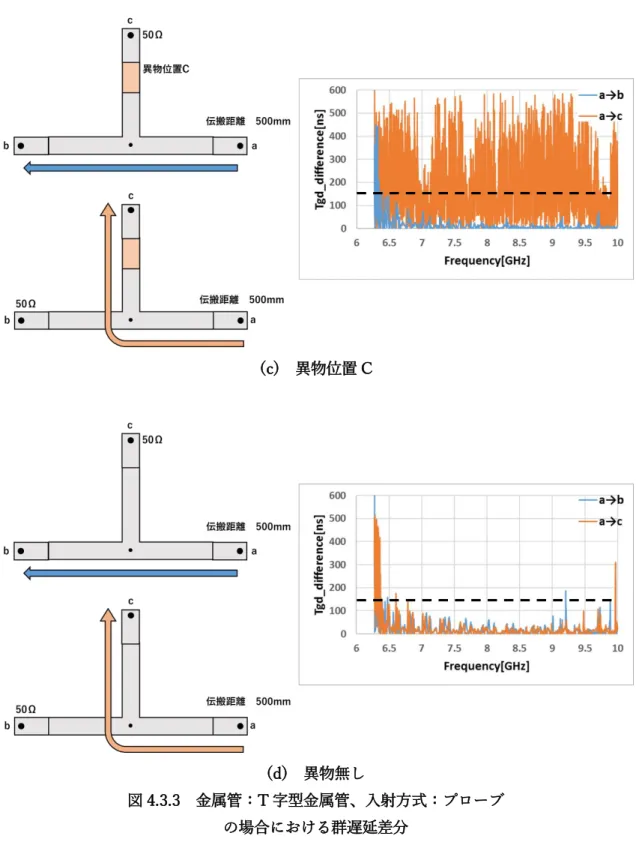
29 4.3 T 字型金属管(1 回分岐) 実験環境を表 4.3.1 に、異物の挿入位置を表した図を図 4.3.1 に示す。 表 4.3.1 実験環境 入射方式 変換器 プローブ パラメータ 伝搬距離 650mm 500mm 異物 石粉粘土(含水) 石粉粘土(含水) 図 4.3.1 異物挿入位置 T 字型金属管での実験手順は以下のようになる。 ①金属管の a 端と b 端に変換器やプローブを装着して経路 a→b の測定を行う。 ②金属管の a 端と c 端に変換器やプローブを装着して経路 a→c の測定を行う。 このような実験を (a)異物位置 A に異物を挿入した場合 (b)異物位置 B に異物を挿入した場合 (c)異物位置 C に異物を挿入した場合 (d)異物を挿入しない場合 の 4 パターンで行った。
30 4.3.1 入射方式:矩形円形変換器
経路 a→b、経路 a→c の伝送特性より求めた群遅延差分のグラフを図 4.3.2 に示す。
(a) 異物位置 A
31 (c) 異物位置 C (d) 異物無し 図 4.3.2 金属管:T 字型金属管、入射方式:変換器 の場合における群遅延差分 閾値による評価を表 4.3.2 に示す。 表 4.3.2 閾値による評価 閾値を超える:○、超えない:× 異物位置 A B C 異物無し 経路 a→b ○ ○ × × a→c ○ × ○ ×
32 図 4.3.2、表 4.3.2 より、金属管の経路上における異物の有無によって、群遅延の変動が 異なっている。また、群遅延の変動が起きた経路の組み合わせによってどの経路上に異物 が存在するか推定することができる。 4.3.2 入射方式:プローブ 経路 a→b、経路 a→c の伝送特性より求めた群遅延差分のグラフを図 4.3.3 に示す。 (a) 異物位置 A (b) 異物位置 B
33 (c) 異物位置 C
(d) 異物無し
図 4.3.3 金属管:T 字型金属管、入射方式:プローブ の場合における群遅延差分
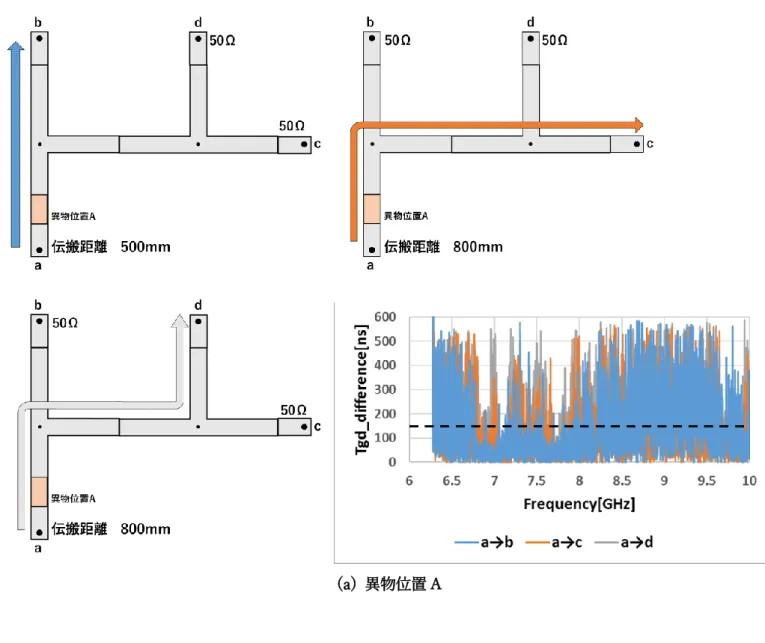
34 本項では、7~9GHz の範囲で評価を行う。閾値による評価を表 4.3.3 に示す。 表 4.3.3 閾値による評価 閾値を超える:○、超えない:× 異物位置 A B C 異物無し 経路 a→b ○ ○ × × a→c ○ × ○ × 図 4.3.3、表 4.3.3 より、プローブを用いた場合でも群遅延差分の変動が起きた経路の組み 合わせから異物の位置を推定することができる。 4.4 2 回分岐金属管 実験環境を表 4.4.1 に、異物の挿入位置を表した図を図 4.4.1 に示す。 表 4.4.1 実験環境 入射方式 変換器 プローブ パラメータ 伝搬距離 経路a→b 650mm 経路a→c a→d 950mm 経路a→b 500mm 経路a→c a→d 800mm 異物 石粉粘土(含水) 石粉粘土(含水) 図 4.4.1 異物の配置図
35 2回分岐金属管での実験手順は以下のようになる。 ①金属管の a 端と b 端に変換器やプローブを装着して経路 a→b の測定を行う。 ②金属管の a 端と c 端に変換器やプローブを装着して経路 a→c の測定を行う。 ③金属管の a 端と d 端に変換器やプローブを装着して経路 a→d の測定を行う。 このような実験を (a)異物位置 A に異物を挿入した場合 (b)異物位置 B に異物を挿入した場合 (c)異物位置 C に異物を挿入した場合 (d)異物位置 D に異物を挿入した場合 (e)異物位置 E に異物を挿入した場合 (f)異物を挿入しない場合の の 6 パターンで行った。
36 4.4.1 入射方式:矩形円形変換器
経路 a→b、経路 a→c、経路 a→d の伝送特性より求めた群遅延差分のグラフを図 4.4.2 に示 す。
37 (b) 異物位置 B
38 (c) 異物位置 C
39 (d) 異物位置 D
40 (e) 異物位置 E
伝搬距離 650mm 伝搬距離 950mm
41 (f) 異物無し
図 4.4.2 金属管:2 回分岐金属管、入射方式:変換器 の場合における群遅延差分
42 閾値による評価を表 4.4.2 に示す。 表 4.4.2 閾値による評価 閾値を超える:○、超えない:× 異物位置 A B C D E 異物無し 経路 a→b ○ ○ × × × × a→c ○ × ○ × ○ × a→d ○ × × ○ ○ × 図 4.4.2、表 4.4.2 より、T 字金属管の時と同様に、群遅延の変動が起きた経路の組み合わ せによってどの経路上に異物が存在するか推定することができる。 2.6 節で前述した、「先行研究(5)~(9)とは違い、電磁波の振幅ではなく位相を用いるため、 長距離による減衰や、分岐による減衰などに影響されにくい。」という利点の検証を本項 で行う。式(2.1.3)より、2 回分岐金属管の𝑆21を用いて、電磁波の伝搬にどの程度の挿入損 失が生じるかを調べる。今回は、以下の挿入損失を比較した。図 4.4.3 に比較する金属管 の経路を示す。 ・直線型 650mm ・直線型 950mm ・2 回分岐 経路 a→b 650mm ・2 回分岐 経路 a→c 950mm ・2 回分岐 経路 a→d 950mm
43
図 4.4.3 挿入損失を比較する経路
これら 5 つの経路の挿入損失は以下のようになる。
44
図 4.4.4 のグラフより、分岐回数が多くなるにつれて損失が大きくなる。また、分岐のと きに直進する方が損失は少ないことが分かる。図 4.4.2 の結果と結び付けると、位相特性 を用いる本手法では、損失に影響されることなく異物検出を行えると考えられる。
4.4.2 入射方式:プローブ
経路 a→b、経路 a→c、経路 a→d の伝送特性より求めた群遅延差分のグラフを図 4.4.5 に 示す。
45 (b) 異物位置 B
46 (c) 異物位置 C
47 (d) 異物位置 D
48 (e) 異物位置 E
49 本項では、8~10GHz の範囲で評価を行う。閾値による評価を表 4.4.3 に示す。 表 4.4.3 閾値による評価 閾値を超える:○、超えない:× 異物位置 A B C D E 異物無し 経路 a→b ○ ○ × × × × a→c ○ × ○ × ○ × a→d ○ × × ○ ○ × (f) 異物無し 図 4.4.5 金属管:2 回分岐金属管、入射方式:プローブ の場合における群遅延差分
50 図 4.4.5、表 4.4.3 より、群遅延の変動が起きた経路の組み合わせによってどの経路上に異 物が存在するか推定することができる。 4.5 変換器とプローブの比較 本稿では、2 つの入射方式を用いて異物検出を行った。本節では、2 つの入射方式の実験 結果より比較を行っていく。以下の実験結果の比較を行う。 ・図 4.3.2(d) T 字金属管 入射方式:変換器 異物無し ・図 4.4.2(f) 2 回分岐金属管 入射方式:変換器 異物無し ・図 4.3.3(d) T 字金属管 入射方式:プローブ 異物無し ・図 4.4.5(f) 2 回分岐金属管 入射方式:プローブ 異物無し 図 4.5.1~4.5.2 にこれらの結果をまとめる。 図 4.5.1 入射方式:変換器(異物無し) 図 4.5.2 入射方式:プローブ(異物無し)
51 図 4.5.1、4.5.2 を比較すると以下の 2 点が異なる。 ・変換器では、「金属管の分岐の仕方」に関わらず、全ての周波数帯域を用いることができ る。 本手法の異物検出は、「異物を挿入しない場合」において群遅延差分が閾値を超えない 周波数帯で行っている。図 4.5.2(a)と(b)を比較すると、プローブは金属管の形状によっ て、その周波数帯が変化する。それに比べ、変換器は金属管の形状に関係なく全ての測定 帯域を使うことができる。よって、変換器は様々な形状の金属管において、異物検出に用 いる周波数帯のことを考えなくてよい。 ・プローブの方が「異物が無い経路」における群遅延差分の値がわずかに大きい 矩形円形変換器とプローブの長所、短所を以下の表 4.5.1 に示す。 表 4.5.1 変換器とプローブの長所、短所 青:長所 赤:短所 変換器 プローブ 金属管の形状に 影響されるか 影響されない、 形状に関わらず異物検出にすべて の周波数帯域を使うことができる 影響される、形状によって異物検 出に使える周波数帯域が異なる 異物が無い経路 の群遅延差分 100ns 程度 120ns 程度 コスト 高い、金属管の径が変わればそれ に対応したものを作る必要がある 低い、金属管の径が変わっても アンテナの長さを変えればよい
52
5. まとめ
5.1 結論 実測実験において、群遅延特性を用いた金属管内の異物検出を行うことができた。本手法 群遅延の「実測値」と「理論値」の差分である「群遅延差分」の変動を解析することで、直 線型金属管のような単純な形状の金属管だけでなく、2 回分岐金属管のような複雑な形状の 金属管であっても異物がある位置を推定することができる。本手法は異物に含まれる水分 によって群遅延の変動が起きているため、今回対象としたシリカスケール以外であっても 水分を含む異物を検出することができる。また、長距離伝搬や分岐による損失がある場合で も、問題なく異物の位置を推定することができる。しかし、本手法では異物が存在する大体 の位置を推定できても、詳細な位置までは明らかにできないため、その点では先行研究の手 法と併用する必要がある。 本稿では「変換器」と「プローブ」という 2 つの入射方式を用いた。金属管の形状に対す る汎用性で言えば、「変換器」が優れているが、コスト面では「プローブ」が優れている。 5.2 今後の課題 入射方式の 1 つである、プローブの改良が挙げられる。今回用いたプローブは金属管の 形状によって異物検出に用いることができる周波数帯域が異なり、汎用性に欠けている。 そのため、変換器のような、汎用性の高いプローブの改良を行うことが求められる。ま た、測定手法の改良が挙げられる。今回異物として主に用いたのは外径 28mm、内径 20mm、管軸方向への長さ 100mm の石粉粘土である。この異物は管の断面積のおよそ 49%を埋めるほど大きなサイズであるため、測定環境を見直すことで、さらに小さなサイ ズの異物を検出可能にする必要があると考えられる。53
6. 謝辞
本論文を作成するにあたり、3 年間ご指導ご鞭撻を頂きました本島邦行教授に心より感謝 いたします。また、修士学位論文の主査を引き受けてくださった山越芳樹教授ならびに、副 査を引き受けてくださった三輪空司准教授に厚く御礼申し上げます。並びに、研究室の先輩 や同輩、後輩方には日々、研究の手助けをいただきました。この場を借りて深く御礼申し上 げます。 最後に、本研究の一部は、一般社団法人日本ボイラ協会の平成31 年度研究助成を受けたも のであることを付記し、関係各位に心より感謝致します。54
7. 参考文献
(1)松田淳:「デジタル X 線非破壊検査技術」, 真空, 54 巻, 1 号, pp.13-20 (2011-3) (2)片桐拓也・佐々木幸太・遊佐訓孝・橋爪秀利:「配管内管軸方向割れ検出のための TE モ ードのマイクロ波を用いた配管広域一括検査技術の開発」, 日本機械学会論文集, 84 巻, 859 号, p.17-00375, (2018-3) (3)廿日出好・奥野伸也・田中三郎:「HTS SQUID を用いた非破壊検査技術の開発‐金属 配管への SQUID NDE の適用‐」, 信学技報, 106 巻, 139 号, pp.47-52 (2006-6)(4)K. Abbasi, S. Ito, and H. Hashizume : “Microwave Detection of Longitudinal Crack and Identification of Its Location instraight Pipe”, Journal of Power and Energy Systems, Vol.2, No.2, pp.538-544 (2008) (5)鶴淵健太・廣木星也・本島邦行・羽賀望:「電磁波伝搬特性解析による金属管内欠陥検 出法」, 電学論 D, 137 巻, 10 号, pp.786-790, (2017-10) (6)竹内良・本島邦行・羽賀望:「電磁波伝搬特性を用いた金属管内の欠陥検出法」, 電学論 D, 136 巻, 5 号, pp.364-372 (2016-5) (7)米田佑樹・羽賀 望・ 本島邦行:「マイクロ波を用いた円形金属管内部における変形検 出の試み」,電学論 D.133 巻,9 号,pp.868-875 (2013-9) (8)原弘和・本島邦行・松原雅昭:「変形導波管内における電磁波伝搬解析」, 信学論 C, 93 巻, 9 号, pp.331-334 (2010-9) (9)佐藤和也・本島邦行・松原雅昭:「変形部を有する円形導波管の電磁波伝搬解析」, 信学 論 C, 94 巻, 7 号, pp.193-196 (2011-7) (10) 細井学・今井秀喜:「地熱熱水からのシリカスケール付着防止のための基礎研究」, 日 本地熱学会誌, 4 巻, 3 号, pp.127-142 (1982)
55