受動歩行機の足形状最適化による歩行安定化
福島 俊彦 (東京大学)・○兵頭 和幸 (福岡工業大学)
Gait Stabilization of Passive Dynamic Walker by Optimization of Foot Shape
Toshihiko FUKUSHIMA (The University of Tokyo) and
○
Kazuyuki HYODO (Fukuoka Institute of Technology)
Passive dynamic walk is excellent at energy efficiency, but has some problems keeping gait stabilization in a real envi-ronment. There is one of problems that passive dynamic walker falter in some envienvi-ronment. To resolve this problem, it is experimentally known that specific foot shape confines pitch and roll swing to keep from faltering. In this paper, we report the method to optimize foot shape based on gait stabilization to improving gait performance.
Key Words: Passive Dynamic Walker, Shape Optimization, Biped Walking, Constraint Mechanism, Genetic Algolithm
1.
序 論 受動歩行は自身のダイナミクスを生かし,緩やかな斜面を 重力の力で下り歩く.外力を補償するのではなく,利用する ことで歩行するため,エネルギー効率が高い1).しかし,受 動歩行には外乱を補償するアクチュエータがなく,安定歩行 可能な環境は非常に限らており,実環境での歩行安定性には いくつかの課題が残されている. 歩行安定性の課題の一つに比較的急な傾斜角において歩行 が成立せず,歩行機が転倒するという課題が挙げられる.2次 元サジタル平面での仮想的なシミュレーションにおいて,歩 行が成立するのは傾斜角領域は非常に狭く,3次元空間にお いてはピッチ回転に加え,ロール回転やヨー回転による運動 も加わり,歩行可能条件はよりシビアなものとなる. この歩行安定性の課題に対して,歩行機の足形状に着目し 歩行安定性の向上を図った研究がある.浅野ら2)は2次元平 間において,円弧足形状の持つ力学的効果を解析した.さら に,兵頭ら3)は 3次元実空間において,足裏に特殊な形状を 設けることにより,歩行機のロール運動とピッチ運動を同期 させ,歩行機の過剰な倒れこみを抑制できることを実験的に 示した. しかし,3次元空間で歩行機の足形状を解析的に設計する ことは困難であり,兵頭らの足形状設計方法は試行錯誤によ るものであった.そこで,本研究ではより多くの環境におい て安定歩行可能な足形状を系統的に設計することを目的とし た.まず,歩行安定性を考慮した足形状最適化手法を提案し, 3次元シミュレーションにより足形状の最適化を行った.次 に,歩行性能の向上を評価し,歩行性能向上要因について考 察した.2.
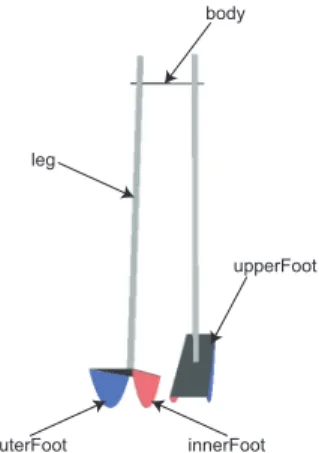
提 案 手 法 足形状を遺伝的アルゴリズムを用いて最適化する.以下に 示す4つのフェーズを繰り返し実行することにより足形状の 最適化を行う. body upperFoot innerFoot outerFoot legFig. 1 3D simulation model
Table 1 Composition of 3D simulation model
Element Piece n Body body 1 Leg leg 2 upperFoot 2 Foot innerFoot 2 outerFoot 2 フェーズ1:足形状生成 与えられた種を用いて3次元足形状を生成する. フェーズ2:歩行シミュレーション 3次元動力学シミュレータOpenHRP3を用いて与えられ た足形状で歩行シミュレーションを行う. フェーズ3:評価値を計算 3. 3節で述べる評価関数を用いて歩行の評価を行う. フェーズ4:最適解探索 Matlab OptimizationToolboxを用いて最適解を探索する.
3.
足形状最適化 3. 1 シミュレーション歩行機シミュレーションで用いる歩行機はBody,Leg及びFoot の3つの要素で構成され,さらにFoot要素はupperFoot,
-0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 -0.1 -0.05 0 z [m] x [m] Bezier curve Controll Point
Fig. 2 Expression of individual ex) l = [0−0.05−0.05−0.1− 0.05− 0.05 − 0.1 − 0.1 − 0.05]T
innerFoot, outerFootの3パーツからなる(Fig.1, Table.1).
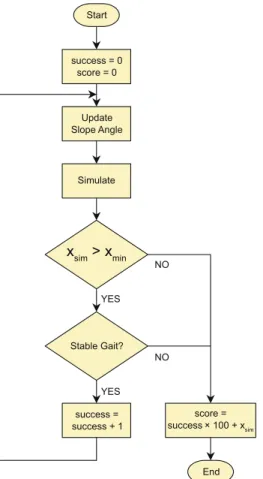
実機を製作する際に安易に形状変更が可能であり,さらに3 次元的な形状を表現するためにinnerFoot及びouterFootの 2枚板構造とし,それぞれが独立に形状を変更できる構成と した. また,自由度は股関節が左右それぞれ1自由度ずつの計2 自由度とした. 3. 2 個体表現 一般に個体表現は少ない次元数で多くの形状を表現できる ことが好ましい.そのためinnerFoot,outerFootの板パー ツの形状をそれぞれ9つの制御点を用いたベジェ曲線で構成 した.この制御点群のy座標を歩行機進行方向側から羅列し た実数値ベクトルlを個体とした(Fig.2). 3. 3 評価関数 歩行安定性を考慮した評価関数を検討した.歩行機の運動 は環境の変化に対して鋭敏である.環境変化の要素としては 斜面の傾斜角変化や摩擦力変化等,様々な要素が考えられる. 本研究ではまず,これらの要素のなかでもより運動への影響 が大きい傾斜角の変化に対してロバストな足形状を設計する ことを目的とした.そのため本評価関数では安定歩行可能な 傾斜角領域の大きさを評価とした.つまり,安定歩行可能傾 斜角領域が大きな個体がエリートとなる. 本節では,3. 3. 1節及び3. 3. 2節で安定性の議論を行い, 3. 3. 4節及び3. 3. 5節で本評価関数の詳細を述べる.その後 3. 3. 6節で本評価関数の妥当性を確かめる. 3. 3. 1 平衡点の安定性 受動歩行を含むリミットサイクルを形成する運動の解析方法 のひとつに,ポアンカレ写像に着目する解析方法がある4) 5). ポアンカレ写像とは,状態空間上において,ある条件を満たす ポアンカレ断面上の1点から,その点が次にポアンカレ断面 を交差する点へのリターンマップを与えるものである6).本 研究では股関節角と股関節角速度の2次元状態空間のポアン カレ断面に着目することにより,運動を1次元の離散的な状 態遷移として捉え解析を行った. 次に,どこのポアンカレ断面を用いて解析するかであるが, 受動歩行は連続的な脚の振りと離散的な脚の切り替えを併せ 持つハイブリッドシステムとして考えることができる.この ハイブリッドシステムにおいて着地直後の状態,つまり状態 空間における離散的なジャンプ直後の状態が重要であるとい う知見がある1).この知見から本研究においてもジャンプ直 後の状態に着目し解析を行った.また,ジャンプ直後の状態 xについて平衡点xf が存在するとき,歩行は局所漸近安定 であると言える1). 3. 3. 2 局所漸近安定と大域的漸近安定 歩行機が安定歩行可能な傾斜角ϕは限定されている.歩行 機の歩行モードは閾値ϕ1, ϕ2, ϕ3を用いて以下の4つのモー ドで表すことができる.(ただし,ϕ1< ϕ2< ϕ3) 歩行不可能モード ϕ < ϕ0であるとき,脚が重力により供給されるエネルギー が歩行により消費するエネルギー(地面と脚が衝突するこ とにより消費するエネルギーと斜面を下ることにより消費 するポテンシャルエネルギー)を下回り歩行機は歩行を行 わない. 単歩行周期モード ϕ1≤ ϕ < ϕ2であるとき,歩行機は重力から受けるエネル ギーと歩行により消費するエネルギーが吊り合い,安定歩 行を行う.このとき平衡点xf は唯一存在し,歩行は1歩 行周期となる(大域的漸近安定). 多歩行周期モード ϕ2≤ ϕ < ϕ3であるとき,歩行機は重力から受けるエネル ギーと歩行により消費するエネルギーが吊り合い,安定歩 行を行う.ただし,平衡点xf は複数存在し,歩行は多歩 行周期となる(局所的漸近安定). 転倒モード ϕ3≤ ϕであるとき,歩行機は重力から受けるエネルギーを 歩行により消費しきることができず,歩行機は加速し転倒 する. 大域的漸近安定であるか否かは定常状態においてジャンプ直 後の状態xが一定であるか否かによって判定可能である7). 3. 3. 3 歩行評価方法 評価の手法として,より多くの環境で大域的漸近安定歩行 が可能な個体をエリートとした.つまり,評価値は大域的漸 近安定領域の大きさ(ϕGS = ϕ2− ϕ1)となる.評価手法の フローチャートをFig.3に示す.Fig.3中の安定判定条件は 3. 3. 4節に述べる条件を用いる.また,xsim はシミュレー ション時間中に歩行機が移動した距離であり,xminは安定 判定を行う最低歩行距離である.歩行機の移動距離xsimが xmin以下の場合は歩行不可能と判断した.本シミュレーショ ンではxmin= 1.5[m]とした.また,歩行機が転倒した場合 にはScore = Score− 10のペナルティを与えた. 3. 3. 4 安定判定方法 本研究において,モデルは個体ごとに変化するため,平衡 点xf を解析的に求めることは困難である.そこで,大域的漸 近安定の条件である「ジャンプ直後の状態が一定である」と いう条件を満たすとき,歩行を安定と判断した. さらに,本研究ではシミュレーション時間の関係から,歩 行が定常状態となりxが平衡点xfに収束するまで観測する ことが困難である.そのため,3. 3. 5節に述べる収束判定条 件を用いて「ジャンプ直後の状態xがある1状態xf への収 束が見込まれる」という条件を安定判定条件とした.
Start success = 0 score = 0 score = success × 100 + xsim success = success + 1 Update Slope Angle
x
sim> x
min NO YES Stable Gait? End NO YES SimulateFig. 3 Flowchart: Fitness function
3. 3. 5 収束判定方法 3. 3. 4節で述べた「ジャンプ直後の状態xがある1状態xf への収束が見込まれる」か否かの判定アルゴリズムを示す. 1. k歩目のジャンプ直後の状態を左脚と右脚がなす角度qk及 び角速度q˙k+(Fig.4)を用いて状態量xkを定義する(Fig.5). x+k = [ qk+ ˙ qk+ ] (1) 2. k歩目の状態量x+k とk + 1歩目の状態量x+k−1の差分を 用いて新たな状態量ykを定義する(Fig.6). yk=|x+k − x + k−1| (2) 3. 各個体ごとに歩幅が異なるためykを正規化し,状態量zk を定義する(Fig.7). zk= yk (x+k + x+k−1)/2 (3) 4. データの平滑化のためzkの移動平均をとったものをzk′ とし,最小二乗法を用いてzk′ をae bkに近似する (a, bは 定数)(Fig.7). zk′ ≈ ae bk ( 4) 5. b < 0であったとき該当個体は収束が見込まれると判定 する. -0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4
Angle of hip joint [rad]
An g u la r ve lo ci ty o f h ip j o in t [ra d /s] Jumpping point
Fig. 4 State trajectory: Sign ’∗’ means a point soon after jump 0 10 20 30 40 50 60 70 0 1 2 3 4 5 6 7 8 9 10 k N o rm o f xk Fig. 5 Norm of xk 0 10 20 30 40 50 60 70 0 1 2 3 4 5 6 7 8 9 k N o rm o f yk Fig. 6 Norm of yk 0 10 20 30 40 50 60 70 0 0.2 0.4 0.6 0.8 1 1.2 1.4 k N o rm o f zk data aebk Fig. 7 Norm of zk
1 1.2 1.4 1.6 1.8 2 0.05 0.06 0.07 0.08 0.09 0.10
Slope Angle [rad]
F o o t R a d iu s [ra d ]
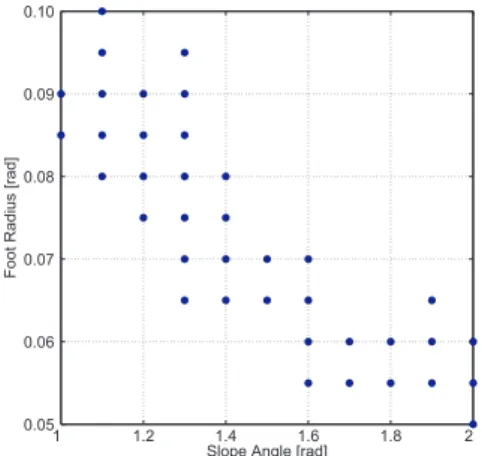
Fig. 8 The relation of stability between foot radius and slope angle
High Energy
Low Energy Supply Energy Surface
Consumption Energy Surface Stability Domain Slope Angle Foot Radius
Fig. 9 The relation of stability between foot radius and slope angle 3. 3. 6 安定判別の妥当性 3. 3. 4節に示した安定判定の妥当性を調査した.Fig.1の3 次元円弧足モデルの足裏円弧半径rと斜面の傾斜角ϕをそれ ぞれ変化させ,半径と傾斜角の各組み合わせに対して3. 3. 4 節に示した安定判別を行った. 結果,円弧半径rと傾斜角ϕの間には相関関係が見られた (Fig.8).Fig.8において,青点印が付いている組み合わせが, 歩行が安定と判定された組み合わせである. また,傾斜角と円弧半径のエネルギーに対する関係性とし て,以下に示す2つの知見がある. 1. 傾斜角が大きくなると重力による供給エネルギーEsupが 大きくなる. 2. 円弧半径が大きくなると遊脚衝突による消費エネルギー Econが小さくなる8). さらに,歩行機が安定歩行可能な円弧半径と傾斜角との関 係を考える.定常状態において,歩行が安定である条件は,重 力による供給エネルギーEsupと歩行による消費エネルギー Econが一致していることである.つまり,Fig.9に示す曲線 部分が安定領域となる.
Fig.9をr-ϕ平面で見たとき,Fig.8に示す分布とFig.9に
示す曲線の形状は,ほぼ同一であり,3. 3. 4節に示した安定 判定は妥当であると判断した. -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 -0.1 -0.05 0 x [m] z [m] foot_inner foot_outer -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 -0.1 -0.05 0 x [m] z [m]
(a) Arc foot
(b) Optimized foot front
Fig. 10 Shape of innerFoot and outerFoot
0 10 20 30 40 50 60 -800 -700 -600 -500 -400 -300 -200 -100 0 100 Generation F it n e ss va lu e Best: -800 Mean: -575.0943 Mean fitness Best fitness
Fig. 11 Evaluation shift
3. 4 結果 Fig.10-(a)に示す円弧足を初期個体とし遺伝的アルゴリズ ムを用いて,最適足形状を探索した.最適化の結果,足形状 は収束を示し(Fig.11),Fig.10-(b)に示す足形状(「最適化 足形状」とよぶ)が得られた.最適化足形状は以下に示す要 素で構成された.ただし,脚の長さをlとする. • innerFoot: 曲率半径 3 4l程度の円弧形状 • outerFoot: 曲率半径1 4l程度の円弧形状と前端部の突起 形状
4.
評 価 最適化足形状を2つの観点から評価する.最適化足形状を 持つ歩行機と一般的な円弧足形状を持つ歩行機の大域的漸近 安定領域ϕGSを比較した.ここで,円弧足形状の円弧半径は lとした.この半径は歩行機全体をリムレスホイールと考え た場合,最適な円弧半径となる.結果,最適化足形状は傾斜 角ϕmin= 0.035[rad]からϕmax= 0.120[rad]までで安定歩行可能であり,ϕGS= 0.085[rad]となった.円弧足形状の場
合,ϕGS = 0.050[rad]程度であったことから,最適化足形状
を与えることにより歩行機の大域的漸近安定領域を約70%拡
-5 0 5 -20 -10 0 10 20
Angle of hip joint [rad]
An g u la r ve lo ci ty o f h ip j o in t [ra d /s]
Arc foot Optimized foot
Fig. 12 State trajectory: Arc foot VS Optimized foot: 15[s]-60[s]
Table 2 Comperition between arc foot and optimized foot in stability domain
Type ϕGS Comparision
Arc foot 0.050[rad] 100[%] Optimized foot 0.085[rad] 170[%]
Table 3 Comperition between arc foot and optimized foot in state trajectory
Type SDjump Comparision
Arc foot 0.101 100[%] Optimized foot 0.013 13[%] 4. 1 状態軌道 次に,最適化足形状を持つ歩行機と一般的な円弧足形状を持つ 歩行機のリミットサイクルへの収束度合いを比較した.Fig.12 において,最適化足形状歩行機の歩行は円弧足形状歩行機のそれ と比べ,リミットサイクルへの収束性が高かった.最適化足形 状での着地直後の状態の標準偏差がSDjump= 0.013であっ た.これに対し,円弧形状での標準偏差がSDjump= 0.101 であったことから,最適化足形状を与えることにより歩行機 の状態軌道の収束性を約87%改善した(Table 3).
5.
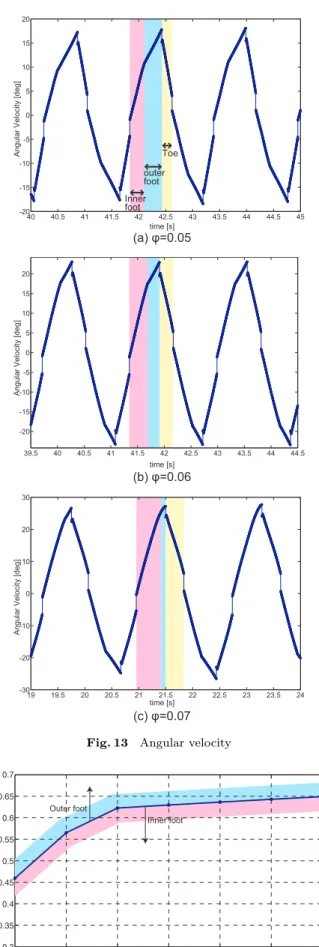
考 察 最適化足形状を持つ歩行機の運動と歩行性能改善要因に関 して考察した. 5. 1 人間の足との比較 本節では最適化足形状を有する歩行機の運動の様子と人間 の歩行の様子を比較し考察する. 実験の結果,遊脚が接地し支持脚となりその後地面から離 れるまでの荷重移動の様子は以下に示す順であった. 1. innerFoot中央円弧部 2. outerFoot中央円弧部 3. outerFoot前方突起部 また,本実験の結果では内側足外側足ともに後方部は斜面 に接地していなかった.そのため,足形状後方部の存在を無 視してよいと仮定すると,最適化足形状には中央部から前方 部にかけて人間の踵,土踏まず,そしてつま先に対応する部 分が存在する.踵から着地し爪先へ重心移動していく様は人 間の歩行と合致するものがあった. さらに,傾斜角ϕが大きくなるにつれて,歩行機は前方突 起部を斜面に突き立て姿勢を維持しようとする様子が観察さ れた.この現象は,先ほどの対応関係とは逆に前方部から中 央部にかけて踵,土踏まずが対応すると考えると説明がつく. つまり,斜面を背中向きに下っている状態である.人間も傾 斜角の大きな斜面や急な階段をを下る場合,傾斜に対して背 中を向け,爪先で着地し踵で体重を支えながら下る歩行方法 を取ると安定して下りられる.歩行機が傾斜角に応じて自ら 歩行方法を選択していたと考えるととても興味深い. 5. 2 自己安定化 本節では最適化足形状を有する歩行機の安定領域拡大要因 について考察する. はじめに,いくつかの傾斜角において,最適化足形状を与 えた歩行機の定常歩行時の股関節角速度の時間変化をFig.13 に示す.桃色背景区間が内側足形状支持区間であり,水色背 景区間が外側足形状支持区間であり,黄色背景区間が爪先支 持区間である.歩行機がロール振動を行いながら運動するの で,先に内側足形状が接地し後から外側足形状が接地する. また,両側足形状が同時に設置している時間は瞬間的であり 無視することができる. ここで,角速度の時間微分(Fig.13におけるグラフの傾き) はトルクの大きさに比例する.この事実から,歩行機は自ら, 遊脚振り抜き時は比較的大きなトルクを発揮し勢い良く遊脚 を振り抜き,その後,遊脚の接地に備え出力トルクを抑えて いることがわかる.また,円弧足形状の歩行機において,円 弧の曲率が大きくなると股関節に発生するトルクが大きくな るという知見がある9).本実験結果とこの知見を合わせ考え ることにより,先に曲率の大きな内側足形状が接地し,その 後曲率の小さな外側足形状にタイミングよく切り替わること により安定した歩行を実現していると言える. 次に,傾斜角ϕ = 0.05[rad] 0.08[rad]における傾斜角ϕと 内側足形状と外側足形状の支持時間比R = Tinn Tinn+Tout との 関係をFig.14に示す.傾斜角ϕが大きくなると曲率の大き い内側足形状の支持時間比が大きくなることがわかる.この 結果から,歩行機は傾斜角に応じて,自らのロール振動を調 節することにより,曲率の時間平均値を変化させ,歩行を安 定化していると言える. さらに,傾斜角に応じて3次元空間での曲率が異なる足形 状の支持時間比が変化する現象を低次元化し,仮想的な2次 元平面での運動として捉え直すと,歩行機は傾斜角に応じて 足形状を変化させていると捉えられる(Fig.15).つまり,環 境の変化に応じて歩行機は自ら逐次最適な足形状を選択し続 けているという捉え方である.この捉え方は,浅野ら9)が今 後の課題としていた足裏曲率が一定でない場合の最適形状設 計に対し,一定の示唆を与えられたと言える.40 40.5 41 41.5 42 42.5 43 43.5 44 44.5 45 -20 -15 -10 -5 0 5 10 15 20 (a) φ=0.05 39.5 40 40.5 41 41.5 42 42.5 43 43.5 44 44.5 -20 -15 -10 -5 0 5 10 15 20 19 19.5 20 20.5 21 21.5 22 22.5 23 23.5 24 -30 -20 -10 0 10 20 30 (b) φ=0.06 (c) φ=0.07 time [s] An g u la r Vel o ci ty [d e g ] An g u la r Vel o ci ty [d e g ] An g u la r Vel o ci ty [d e g ] time [s] time [s] Inner foot outer foot Toe
Fig. 13 Angular velocity
0.05 0.055 0.06 0.065 0.07 0.075 0.08 0.3 0.35 0.4 0.45 0.5 0.55 0.6 0.65
Slope Angle [rad]
Inner-Outer Rate
0.7
Inner foot Outer foot
Fig. 14 Time rate of inner foot shape and outer foot shape
(a) Low slope angle
(b) High slope angle Inner
foot
Oute r foot front
Fig. 15 Virtual 2D foot shape
6.
結 論 遺伝的アルゴリズムを用いて,歩行安定性を考慮した足形 状最適化を行い,受動歩行機の3次元空間における安定歩行 領域を拡大することに成功した.また,定性的ではあるが歩 行機自身の持つ自己安定化の原理について考察した.この結 果,歩行機が環境の変化に対して自らの身体特徴を生かし運 動を変化させることにより,歩行を安定化しているという新 たな示唆を与えた. 本研究を通して,歩行機の持つ形態の重要性を確認した. 今後,環境の変化に応じて形態を変化させる制御手法を検討 する. 参 考 文 献1)T. McGeer. Passive dynamic walking. The International Journal of Robotics Research, Vol. 9, No. 2, pp. 62–82, 1990.
2)F. Asano and Z.W. Luo. Efficient dynamic bipedal walking using effects of semicircular feet. Robotica, Vol. 29, No. 3, pp. 351–365, 2011.
3)K. Hyodo, T. Oshimura, S. Mikami, and S. Suzuki. Sta-bilizing passive dynamic walk under wide range of envi-ronments by constraint mechanism fitted to sole of foot. Journal of Robotics and Mechatronics, Vol. 21, No. 3, p. 403, 2009.
4)Y. Sugimoto and K. Osuka. Stability analysis of passive-dynamic-walking focusing on the inner structure of poincare map. In Advanced Robotics, 2005. ICAR’05. Proceedings., 12th International Conference on, pp. 236– 241. IEEE, 2005.
5)M. Wisse, A.L. Schwab, R.Q. van der Linde, and F.C.T. van der Helm. How to keep from falling forward: el-ementary swing leg action for passive dynamic walkers. Robotics, IEEE Transactions on, Vol. 21, No. 3, pp. 393– 401, 2005.
6)H. Poincar´e. Science and hypothesis. Science Press, 1905. 7)Y. Ikemata, A. Sano, and H. Fujimoto. A physical prin-ciple of gait generation and its stabilization derived from mechanism of fixed point. In Robotics and Automation, 2006. ICRA 2006. Proceedings 2006 IEEE International Conference on, pp. 836–841. IEEE, 2006.
8)田崎勇一, 井村順一. 平面受動 2 足歩行における足形状の省エネ ルギー効果の考察. 日本ロボット学会誌 = Journal of Robotics Society of Japan, Vol. 23, No. 1, pp. 131–138, 2005-01-15. 9)F. Asano, M. Yamakita, and K. Furuta. Virtual passive dynamic walking and energy-based control laws. In Intelli-gent Robots and Systems, 2000.(IROS 2000). Proceedings. 2000 IEEE/RSJ International Conference on, Vol. 2, pp. 1149–1154. IEEE, 2000.
![Fig. 2 Expression of individual ex) l = [0 −0.05−0.05−0.1− 0.05 − 0.05 − 0.1 − 0.1 − 0.05] T](https://thumb-ap.123doks.com/thumbv2/123deta/6340880.628926/2.892.88.426.119.214/fig-expression-individual-ex-l-t.webp)
![Fig. 12 State trajectory: Arc foot VS Optimized foot: 15[s]- 15[s]-60[s]](https://thumb-ap.123doks.com/thumbv2/123deta/6340880.628926/5.892.84.429.115.341/fig-state-trajectory-arc-foot-vs-optimized-foot.webp)