3 種の食物連鎖型 prey-predator モデルに現れる反応拡散系の
定常解の a priori 評価と非定数定常解の存在
加瀬 肇
1
導入と主結果
prey-predatorモデルは被食者(prey)と捕食者(predator)との関係をモデル化したものであり, 昔から多くの研究がなされている. prey-predatorモデルには様々なモデルが考えられているが,拡 散効果を考えたもっとも単純なモデルは次の古典的なLotka-Volterraモデルである.
−d1∆u=u(a−kv), in Ω,
−d2∆v=v(−b+hu), in Ω,
∂u
∂n = ∂v∂n = 0, on ∂Ω,
但し,a, b, k, h, d1, d2>0,nは外向き法線ベクトル, Ω⊂RN (N ≥1)は滑らかな境界をもつ有界領 域とし,u(x), v(x)はそれぞれ被食者,捕食者の場所xでの密度を表している.このLotka-Volterra モデルに対しては [17]において空間不均一な定常解は存在しないことが証明されている.ここで
Turingの拡散誘導不安定化という現象を紹介する.これは拡散がない場合には安定であった平衡点
が拡散を入れることで不安定化し非一様な定常パターンが生まれるというものである. Turingの 拡散誘導不安定化が起こり,非一様な定常パターンをもつprey-predatorモデルとしてAllee効果 と呼ばれる効果を含めたモデルが考えられている. Allee効果とはある密度までは繁殖率に良い影 響があるが大きすぎると悪い影響を及ぼしてしまう効果である. [15], [20], [3]では次のAllee効果 を含んだ被食,捕食関係にある2種のモデルが考察されている.
∂u
∂t −d1∆u=u(a1+a2u−a3u2−kv), in Ω×(0,∞),
∂v
∂t −d2∆v=v(−1 +u−v), in Ω×(0,∞),
∂u
∂n = ∂n∂v = 0, on ∂Ω×(0,∞),
u(x,0) =u0(x)≥0, v(x,0) =v0(x)≥0, in ¯Ω,
(1.1)
−d1∆u=u(a1+a2u−a3u2−kv), in Ω,
−d2∆v=v(−1 +u−v), in Ω,
∂u
∂n = ∂v∂n = 0, on ∂Ω,
(1.2)
但し, a1 ≥0, a3, k, d1, d2 >0とし,u0(x)とv0(x)は恒等的に0でないΩ¯ 上の連続関数とする. Allee効果はa2 >0の場合が対応するが本論文ではa2の符号は不定とする. a1+a2> a3ならば この方程式はただ1つの正値定数解 (u∗, v∗)をもつ.
[15]では特異摂動法を用いて1次元の(1.2)に対してd1が小さい場合に遷移層をもつ解を構成し, [20]では解の構成だけでなくその安定性も解析している. また f(u, v) =u(a1+a2u−a3u2−kv) とおき, θ∗ = ∂f∂u(u∗, v∗) =u∗(a2−2a3u∗)とするとき, [3]において θ∗ ≤0ならば (u∗, v∗)は常微 分方程式としてだけでなく,いかなる拡散係数d1, d2に対しても漸近安定であることがわかってい る.さらに θ∗ >0ならば d1が小さく d2が大きいときに写像度の理論を用いて (1.2)の正値非定 数解が存在することが示されている. θ∗が正であってもある程度小さいならば常微分方程式とし て(u∗, v∗)は漸近安定になるので,この結果は(1.2)がTuringの拡散誘導不安定化が起こる一例で あることを示唆している.
本論文では, 2種のモデル(1.1),(1.2)にvを捕食するwという種を加えた次の3種の食物連鎖モ デルを考える.
∂u
∂t −d1∆u=u(a1+a2u−a3u2−kv), in Ω×(0,∞),
∂v
∂t −d2∆v=v(−1 +u−v−w), in Ω×(0,∞),
∂w
∂t −d3∆w=w(−α+βv−γw), in Ω×(0,∞),
∂u
∂n = ∂n∂v = ∂w∂n = 0, on∂Ω×(0,∞),
u(x,0) =u0(x)≥0, v(x,0) =v0(x)≥0, w(x,0) =w0(x)≥0, in ¯Ω,
(1.3)
−d1∆u=u(a1+a2u−a3u2−kv), in Ω,
−d2∆v=v(−1 +u−v−w), in Ω,
−d3∆w=w(−α+βv−γw), in Ω,
∂u
∂n = ∂v∂n = ∂w∂n = 0, on ∂Ω,
(1.4)
但し, α, β, γ, d3 > 0, w0(x)は恒等的に0でないΩ¯ 上の連続関数とする. 2節で詳しく述べるが a1+a2 > a3, βα > u1
∗−1ならば, (1.3)の正値定数解(u∗, v∗, w∗)がただ1つ存在して(u∗, v∗, w∗)→ (u∗, v∗,0) (γ → ∞)となることがわかる.
本論文で得られた主な結果として(1.4)の正値解に対するa priori評価と正値非定数解の非存在, 存在に関する定理を述べる.
定理 1.1 (上からのa priori評価) a1+a2 > a3とすると(1.4)の正値解は次を満たす. maxΩ¯ u < u∗∗+, max
Ω¯ v < u∗∗+ −1, max
Ω¯ w < β
γ(u∗∗+ −1).
但し, u∗∗+ はa1+a2u−a3u2 = 0の正値解であり a1+a2 > a3より u∗∗+ >1である.
定理 1.2 (下からのa priori評価) a1+a2 > a3とすると,d >0に対してΛ = Λ(a1, a2, a3, k, d,Ω)>
0 (Λ≤u∗−1)が定められる(詳細は4節で述べる). そのΛに対して βΛ> αとする.このとき,
ある定数C1 =C1(a1, a2, a3, k, d,Ω) >0, Ci =Ci(a1, a2, a3, k, α, β, γ, d,Ω)>0 (i= 2,3)が存在 して, di≥d(i= 1,2,3)ならば (1.4)の正値解は次を満たす.
minΩ¯ u > C1, min
Ω¯ v > C2, min
Ω¯ w > C3.
今, 0 = µ0 < µ1 < µ2 < · · · を Ω上の −∆の相異なるNeumann固有値とする.また θ∗ =
∂f
∂u(u∗, v∗) =u∗(a2−2a3u∗)とする.このとき,θ∗→θ∗ (γ → ∞)となっていることに注意する.定
理1.1のa priori評価を用いて次の正値非定数定常解の非存在定理を得ることができる.
定理 1.3 (非定数解の非存在) a1+a2 > a3とする.このとき,
1. あるd˜1 >0とd˜3 >0が存在して, µ1d1 >d˜1, µ1d2 > u∗∗+ −1, µ1d3 >d˜3ならば(1.4)は正 値非定数解をもたない.
2. あるd˜2 >0が存在して, µ1d1 > a1+ 2|a2|u∗∗+, µ1d2 >d˜2, µ1d3 > β(
u∗∗+ −1)
ならば(1.4) は正値非定数解をもたない.
さらに定理1.1と1.2を用いることで以下の正値非定数定常解の存在定理が得られる. 定理 1.4 (非定数解の存在) a1+a2 > a3, θ∗ > 0とする. µ1は単純とし, θd∗
1 ∈ (µ1, µ2)とする. すると定理1.2で述べた d = 2µθ∗
2 に対する Λ = ˆˆ Λ(a1, a2, a3, k,Ω) > 0 ( ˆΛ ≤ u∗ −1)が定まる. βΛˆ > αとし, 十分大きい γ0 > 0に対して γ ≥ γ0 とする.このとき,ある d >ˆ 0が存在して d2, d3 ≥dˆに対して(1.4)は正値非定数解をもつ.
µ1が単純となる領域については2次元の細長い楕円領域[2],握り手の部分が細長いダンベル型領 域[11], [1]などがある.
定理1.4は(1.4)に対してTuringの拡散誘導不安定化が起こる1つの十分条件を示唆したこと
になるが,本論文ではより一般的な十分条件も得ている.また,上で述べた定理以外にも2種のモデ ル(1.1), (1.2)に対する[3]の結果を3種のモデル(1.3)に拡張した結果も与えている.
本論文の内容は以下の通りである. 2節で(1.3)の定数解の構造とこの論文で用いる知られてい る結果を述べて, 3節では(1.3)の解の時間発展の挙動と θ∗≤0のときの(u∗, v∗, w∗)の局所的,大 域的漸近安定性を調べる. 4節では定理1.1と1.2の証明を与える. 5節では定理1.3の証明を与え, さらに定理1.4をより一般的な形で述べてその証明を与える.また6節では(1.2)でd2 → ∞とし たshadow系と(1.4)でd2, d3 → ∞としたshadow系の正値非定数解の存在を示す. 7節では(1.1)
と(1.3)についての数値シミュレーションの結果を紹介する.
2
準備
2.1 定数解の構造
この小節では(1.3)の定数解について考える.
(u, v, w)を(1.3)の0でない定数解とする. (1.3)2式はw=−1 +u−vと書き換えられる.これ を(1.3)の1式と3式に代入すると,それぞれv =−k1(
a3u2−a2u−a1
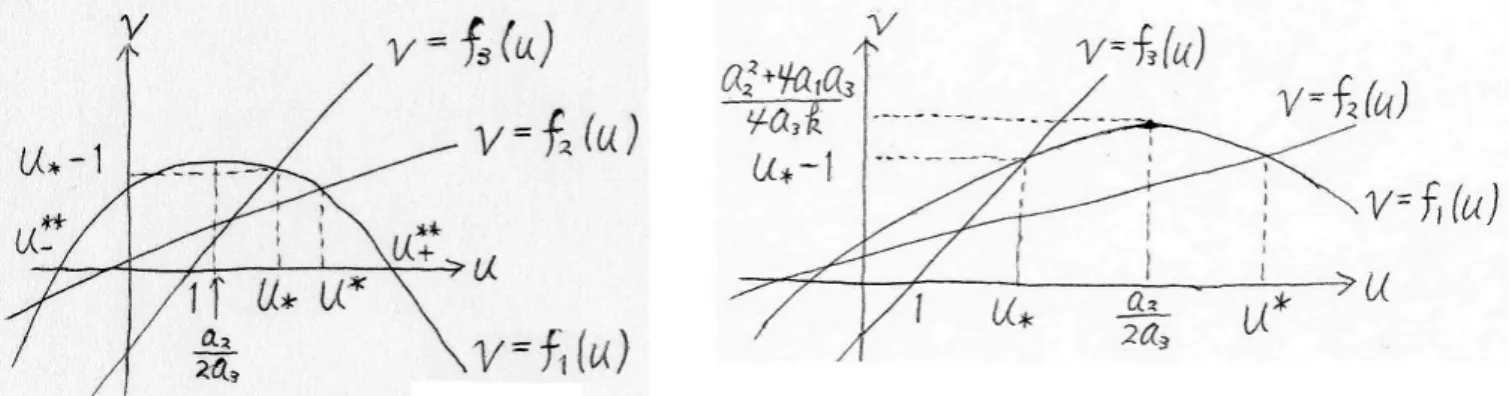
),v = β+γγ u+αβ+γ−γとなる. ここで f1(u) =−k1(
a3u2−a2u−a1)
,f2(u) = β+γγ u+ αβ+γ−γ,f3(u) =u−1とおく. a1+a2> a3 はf1(1)>0と同値であり,これを仮定することで v=f1(u)とv=f3(u)の交点(u∗, v∗)がただ1 つ存在する. (u∗, v∗)は(1.1)の正値定数解で次のように書ける.
u∗= a2−k+√
(a2−k)2+ 4a3(a1+k)
2a3 >0, v∗ =u∗−1>0.
また, θ∗ = u∗(a2−2a3u∗) = u∗ {
a2−(a2−k+√
(a2−k)2+ 4a3(a1+k) }
< ku∗ が成立して いる.
(1.3)の正値定数解がただ1つ存在するための十分条件は a1+a2 > a3, 0< f2(u∗)< u∗−1で ある. 0< f2(u∗)は常に成立しているので,f2(u∗)< u∗−1だけを考えればよい.この条件を書き 換えると αβ > u1
∗−1になる.しかしf1(u)の頂点(
a2
2a3,a22+4a4a 1a3
3k
)の位置に注目して2つの場合に分 けて考えるとより詳しい情報が得られる.
1. a1+a2 > a3, 2aa2
3 ≤u∗ (θ∗≤0と同値)の場合.
この場合は 0< f2(u∗)< u∗−1は (1.3)の正値定数解がただ1つ存在するための必要十分 条件になっている.また正値定数解が2つあることはない.
2. a1+a2 > a3, 2aa2
3 > u∗ (θ∗>0と同値)の場合.
この場合は「f2(u∗)< u∗−1」または「f2(u∗) =u∗−1, β+γγ < f1′(u∗)」ならば (1.3)の正値 定数解がただ1つ存在する. β+γγ < f1′(u∗)を書き換えるとf1′(u∗) = a2−2ak3u∗,k > a2−2a3u∗ より,γ < k−a(a2−2a3u∗
2−2a3u∗)になる.
また (1.3)の正値定数解が2つ存在するための必要十分条件はf2(u∗)> u∗−1,f2 (a2
2a3
)≤
a22+4a1a3
4a3k である.条件を書き換えるとそれぞれ βα < u1
∗−1, 4a3kα−(a22+ 4a1a3)β ≤ {a22 − 2a2k+ 4a3(a1 +k)}γとなる.しかし θ∗ > 0は a22−2a2k+ 4a3(a1 +k) < 0と同値なの で4a3kα−(a22+ 4a1a3)β <0でなければならない.この条件を書き換えると αβ > a24a3k
2+4a1a3
となる.グラフより a22+4a4a 1a3
3k > u∗ −1となっているので, a24a3k
2+4a1a3 < αβ < u1
∗−1, γ ≤
a22+4a1a3
|a22−2a2k+4a3(a1+k)|β−|a2 4a3kα
2−2a2k+4a3(a1+k)| が正値定数解が2つ存在するための必要十分条件 である.
図1. 2aa2
3 ≤u∗ (θ∗ ≤0)のグラフ(左)と2aa2
3 > u∗ (θ∗>0)のグラフ(右).
以上のことをまとめると次の命題が得られる.
命題 2.1 a1+a2 > a3とする. (1.3)の正値定数解がただ1つ存在するための十分条件は, β
α > 1
u∗−1 または a2 2a3
> u∗, β
α = 1
u∗−1, γ < a2−2a3u∗ k−(a2−2a3u∗)
である. また(1.3)の正値定数解が2つ存在するための必要十分条件は
a2
2a3 > u∗, 4a3k a22+ 4a1a3
< β
α < 1
u∗−1, γ ≤ a22+ 4a1a3
|a22−2a2k+ 4a3(a1+k)|β− 4a3kα
|a22−2a2k+ 4a3(a1+k)|である. そこでただ1つの正値定数解を(u∗, v∗, w∗)とすると, (u∗, v∗)はv=f1(u)とv=f2(u)の交点な
ので次のように書ける.
u∗ =
a2− β+γkγ +
√(
a2−β+γkγ )2
−4a3
(α−γ β+γk−a1
) 2a3
, v∗ = γ
β+γu∗+α−γ
β+γ, w∗=−1+u∗−v∗. 故に(u∗, v∗, w∗) →(u∗, v∗,0) (γ → ∞)となる.また,グラフより u∗ < u∗となっていることも わかる. θ∗は次の不等式を満たしている.
θ∗ =u∗(a2−2a3u∗) =u∗
a2−
a2− kγ β+γ +
√(
a2− kγ β+γ
)2
−4a3
(α−γ β+γk−a1
)
< kγ β+γu∗ この節で述べた θ∗とθ∗が満たす不等式は重要なのでここでまとめておく.
命題 2.2 a1+a2 > a3とする.このとき, θ∗ < ku∗が成立する.さらに βα > u1
∗−1 を仮定すると, θ∗ < β+γkγ u∗が成立する.
2.2 準備
この小節では記号の定義や知られている結果を紹介する.この小節で紹介するもの以外にも利用 する補題があるがそれらはそれぞれの節で紹介する.
u∈C( ¯Ω)に対して,∥u∥∞= supx∈Ω¯|u(x)|とする. 0< σ <1に対して, C1,σ( ¯Ω) =
{
u∈C1( ¯Ω)| sup
x,y∈Ω,x̸=y
|Du(x)−Du(y)|
|x−y|σ <∞ }
である. さらに非負の整数m, nに対して,
Cm;n(Ω×(0,∞)) = {
u∈C(Ω×(0,∞))|Dsxu,∂ju
∂tj ∈C(Ω×(0,∞)) (1≤ |s| ≤m, 1≤j≤n) }
とする. 但し,s= (s1, s2,· · · , sN),|s|=s1+s2+· · ·+sN,Dsxu= ∂s1x1∂s∂2|xs2|u···∂sNxN である.
また 0< l <1,ρ >0, r= 0,1,Dtr= dtdrr に対して, C2+l( ¯Ω) =
{
Dsu∈C( ¯Ω) (|s| ≤2)| sup
0<|x−y|≤ρ, x,y∈Ω¯
|Dsu(x)−Dsu(y)|
|x−y|l <∞ (|s|= 2) }
. C2+l;2+l2 ( ¯Ω×[0, T]) ={
DxsDrtu∈C( ¯Ω×[0, T]) (2r+|s| ≤2)|A <∞, B <∞} . 但し,
A= sup
0<|x−y|≤ρ, (x,t),(y,t)∈Ω¯×[0,T]
|DsxDrtu(x, t)−DxsDrtu(y, t)|
|x−y|l (2r+|s| ≤2).
B = sup
0<|t−t′|≤ρ,(x,t),(x,t′)∈Ω¯×[0,T]
|DsxDtru(x, t)−DsxDtru(x, t′)|
|t−t′|l+2−2r−|s|2 (1≤2r+|s| ≤2).
補題 2.1 (Lp評価[4]) u∈H1(Ω)は次の方程式の弱解とする.
−∆u=f, in Ω,
∂u
∂n = 0, on ∂Ω,
このとき,f ∈L∞(Ω)ならば任意のp >1に対してu∈W2,p(Ω)であり,∥u∥W2,p(Ω) ≤C(∥f∥Lp(Ω)+
∥u∥Lp(Ω))となる定数C(p, N,|Ω|)>0が存在する.
補題 2.2 (埋め込み定理) p > N ならば W2,p(Ω)は C1,σ( ¯Ω) (0< σ <1)にコンパクトに埋め込 める.
証明.
[4]より,p > Nに対して W2,p(Ω)はC1,σ( ¯Ω) (0< σ <1)に連続に埋め込める.さらに 0< σ′ <
σ <1に対して,C1,σ( ¯Ω)はC1,σ′( ¯Ω)にコンパクトに埋め込める.よって定理の主張がいえる. 補題 2.3 (放物型の最大値原理) Ω⊂RN を有界な開集合, D(x, t), b(x, t), c(x, t)∈C( ¯Ω×[0, T], D≥D0 >0とし,u(x, t)∈C( ¯Ω×[0, T])を次の不等式の古典解とする.
∂u
∂t =D(x, t)∆u+b(x, t)· ∇u+c(x, t)u, in Ω×(0, T).
このとき, ∂u∂n+β(x)u≥0 on ∂Ω×(0, T] (β(x)≥0)とすると u≥0 in ¯Ω×[0, T]となる. さらに Ωが連結ならば,