Title
脚の振り降ろしを利用した起き上がり運動における角運動
量条件( 本文(Fulltext) )
Author(s)
伊藤, 聡; 阪, 圭央; 川崎, 晴久
Citation
[日本ロボット学会誌] vol.[21] no.[8] p.[932]-[939]
Issue Date
2003-11-15
Rights
The Robotics Society of Japan (日本ロボット学会)
Version
出版社版 (publisher version) postprint
URL
http://hdl.handle.net/20.500.12099/27393
932 日 本 ロ ボ ッ ト学 会 誌Vol.21 No.8, pp.932∼939, 2003
学 術 ・技 術 論 文
脚 の 振 り降 ろ しを利 用 した起 き上 が り運 動 に お け る
角 運 動 量 条 件
伊
藤
聡*1*2阪
圭
央*1川﨑
晴
久*1
Angular
Momentum
Condition
for Stand-Up
Motion
Using
the
Leg Swing
Movement
Satoshi
Ito*1*2, Yoshihisa
Saka*l
and Haruhisa
Kawasaki*1
In this paper, we consider a stand-up motion from a face-up lying posture by means of swing-down movement of a leg. Because whether the motion is feasible or not depends on the angular velocity of the leg swing, we propose a method to calculate it approximately. This calculation is based on the phase plane analysis and on conservation of angular momentum. The main problem there is how to evaluate the motion during the rotation around hip, where angular momentum has an effect of the gravity. Here, we calculate it using the initial and final position of COG in the hip rotation phase. This method enables us to estimate a necessary angular velocity without solving dynamic equation. Finally, we examine the effectiveness of the method by simulation and experiments with our constructed robot.
Key Words: Stand-up Motion, Leg Swing Velocity, Conservation of Angular Momentum, Phase Plane Analysis, Knee Joint 1.は じ め に 人 間 に代 表 され る2足 歩 行 は 多 脚 歩 行 に 比 べ て 不 安 定 な 歩 行 動 作 で あ り,路 面 状 況 の 変 化 や 周 囲 の 環 境 な ど外 乱 の 影 響 を 受 け や す い.歩 行 動 作 途 中 に お い て 外 乱 の 影 響 を 受 け た 場 合,対 応 しき れ ず 転 倒 して しま う こ と は十 分 起 こ り う る.人 間 の 場 合, 歩 行 中 に転 倒 して もす ぐ に 起 き 上 が り,本 来 の 目 的 す な わ ち 歩 行 動 作 に復 帰 す る こ と が 可 能 で あ る.歩 行 ロ ボ ッ トの 研 究 で は 安 定 した 歩 行 動 作 を 実 現 させ る こ と を 目 的 と し た もの が 主 で あ る が,転 倒 した 場 合 に本 来 の 目 的 行 動 で あ る 歩 行 動 作 に 復 帰 す る 手 法 を考 え て お く こ と も,歩 行 ロ ボ ッ トの 実 用 化 を考 え る 場 合 に重 要 と な る. 起 き上 が り運 動 を 仰 向 け状 態 か ら考 え た 場 合,人 間 が 行 う動 作 は 多 様 で あ る.通 常,我 々 はFig.1(a)の よ う に 体 を ひ ね っ て い っ た ん う つ 伏 せ 状 態 に な り,そ の 後 手 を床 に つ い て 体 重 の 支 持 点 を増 や し,手 足 の 冗 長 な 自 由 度 を利 用 し て静 的 な 安 定 性 を常 に確 保 し な が ら起 き上 が る と い う 戦 略 を と る.一 方 で は, Fig.1(b)の よ う に 腰 関 節 を使 っ て 脚 を振 り降 ろ し,体 を う ま く 畳 む こ と に よ っ て 一 度 し ゃ が ん だ 姿 勢 に な り,そ の 後 バ ラ ン ス を と り な が ら 立 ち 上 が る と い う 方 法 も と れ る. .この場 合,体 重 を 支 持 しな い とい う 意 味 で は 手 を必 要 と しな い.そ の 代 わ りに 体 を巧 み に 伸 縮 させ,運 動 量 を 重 力 に抗 した 起 き上 が りに 利 用 す る.つ ま り,手 と い う機 構 お よ び 自 由 度 が 減 少 す る 分,脚 の 振 り等 で 得 ら れ る 反 動 を う ま く利 用 して い る と考 え られ る.こ れ は 運 動 量 を利 用 す れ ば 少 な い 自 由 度 で の 起 き 上 が り運 動 が 実 現 で きる こ と を示 唆 して い る.本 稿 で は,こ の よ うな 観 点 か ら, 仰 向 け の 状 態 か ら起 き上 が る 運 動 につ い て考 察 し て み る. 起 き上 が り運 動 に 関 して は,単 純 な ロ ボ ッ トか ら ヒ ュ ー マ ノ イ ド まで 様 々 な 報 告 が な され て い る.単 純 な 機 構 の もの と して は 中 久 喜 ・山藤[1][2]ら の よ う に慣 性力 や 遠 心 力 を有 効 に 利 用 し て 起 き上 が る 運 動 を 実 現 す る試 み や,森 本 ・銅 谷[3]の よ う に 強 化 学 習 に よ りロ ボ ッ トに 運 動 を獲 得 させ る研 究 な ど が あ る.ま た ヒ ュ ー マ ノ イ ドに よ る 起 き上 が りに は,直 立 状 態 へ の 復 帰 の 実 現 を 目的 と し た 金 広 らの 研 究[4],ロ ボ ッ トの 身 体 を通 し た環 境 と の イ ン タ ラ ク シ ョ ン に着 目 し引 き込 み 現 象 に よ り起 き上 が り運 動 を生 成 した 高 橋 らの 研 究[5],エ ン ター テ イ ン メ ン トと し て のSONY SDR-4X[6]が あ る.ヒ ュ ー マ ノ イ ドの 場 合,多 く は 手 を 利 用 して 起 き上 が る もの が 多 く,本 稿 で 関 心 を も つ 方 法 に つ い て の 報 告 は 少 な い.一 方,単 純 な ロ ボ ッ トに よ る起 き上 が りで は,そ の 機 構 の 簡 便 さ ゆ え 本 稿 で 着 目 して い る よ う な ダ イナ ミカ ル な動 作 を 利 用 して い る.学 習 に 基 づ く手 法 は環 境 が 変 動 して も再 学 習 す れ ば 運 動 が 獲 得 され る点 で 優 れ て は い る が, 起 き 上 が りが で き る ロ ボ ッ トを設 計 す る た め の 目安 と な る よ う な モ ー タ の 必 要 速 度 と い っ た 条 件 は,ロ ボ ッ トが 完 成 して 学 習 が 終 了 した 後 の 解 析 で しか 明 ら か に な ら な い.脚 の 振 りを 利 用 原 稿 受 付2002年9月12日 *1岐 阜 大 学 工 学 部 *2理 化 学 研 究 所 バ イオ ・ミ メテ ィッ クコ ン トロー ル 研 究 セ ン ター *1Faculty of Engineering , Gifu University *2Bio -mimetic control research center, RIKEN
脚 の 振 り降 ろ しを 利 用 した 起 き上 が り運 動 に お け る 角 運動 量 条 件 933
Fig.1 Stand-up motion strategies
した 起 き上 が り運 動 の 場 合,そ の 条 件 は 脚 を振 り降 ろ す と き の 角 運 動 量 の 大 き さ に 集 約 され る と本 稿 で は考 え る.そ こ で,こ の 条 件 を導 き 出 す こ と を 主 目 的 に 起 き上 が り運 動 の 解 析 を 行 っ て い く.こ の 脚 の振 り降 ろ し時 に必 要 な 情 報 が 事 前 に 分 か る と, ロ ボ ッ トの 設 計,特 に モ ー タ の 選 定 時 に お い て 非 常 に 有 用 と な る.本 稿 で は,起 き上 が り運 動 の途 中 で 表 れ る しゃが ん だ 姿 勢 を 指 定 す る こ と に よ り,必 要 な 脚 の 振 り降 ろ しの 角 運 動 量 を 見 積 も る 方 法 を提 案 す る.こ の と き,回 転 時 の 姿 勢 を 一 定 に保 つ と い う条 件 を課 す が,こ れ に よ り解 析 が 容 易 に な り,運 動 方 程 式 を 陽 に解 く こ とな く角 運 動 量 の 算 出 が 可 能 な こ とが 利 点 とな る.
2.起
き上 が り運 動 の 解 析
2.1モ デ ル と問 題 設 定 脚 を振 る 動 作 に は 胴 部 と 脚 部 の2リ ン クが 必 要 で あ る が,起 き上 が る こ と を 目 標 と し た 場 合,膝 関 節 の 動 きが 重 要 な 役 割 を 担 っ て い る と考 え ら れ る.脚 を振 り下 ろ す と き に は 膝 を 伸 ば し 脚 部 の 慣 性 モ ー メ ン トを大 き くす る こ と で,胴 部 を 起 こ す の に 必 要 な 大 き な 運 動 量 を 得 て い る.一 方,着 地 す る と き に は膝 を 折 り,慣 性 モ ー メ ン トを 小 さ くす る こ と で 系 全 体 を 回 転 しや す く して い る.そ こ で,本 稿 で は腰 関 節,足 関 節 だ け で な く膝 関 節 の 自 由 度 も も っ た3自 由 度4リ ン ク モ デ ル が 必 要 十 分 な 身 体 的 条 件 と 考 え,こ の 機 構 で の 起 き上 が り運 動 を 考 え る. 考 察 す る 運 動 の 本 質 は,仰 向 け 状 態 時 に 脚 を 振 っ て 得 ら れ る 運 動 量 を,起 き上 が る た め に 利 用 す る と い う点 で あ る.そ の 解 析 に は 矢 状 面 内 の 運 動 を 考 え れ ば 十 分 で あ る.以 下 で は,床 面 は 水 平 で 滑 べ ら な い も の と仮 定 して 解 析 す る. 脚 の 振 り降 ろ し を利 用 した 起 き 上 が り と してFig.2の よ う な 運 動 を取 り上 げ る.ま ず,仰 向 け状 態(1)よ り脚 を 持 ち上 げ,適 当 な角 度 で 振 り戻 す(2).そ して,振 っ た 脚 を あ る 角 度 で 急 減 速 させ る(3)と そ の た め の トル ク が 胴 部 を持 ち 上 げ る よ う に 作 用 す る.こ の と き体 を 折 り畳 み(4),そ の 姿 勢(5)を 保 ちつ づ け る と,腰 回 りの 回 転 が 起 き,足 部 が 地 面 に接 地 す る(6).続 い て 上 体 の 姿 勢 を一 定 に保 つ と足 関 節 回 りの 回転 が 起 き(7),し ゃが ん だ 姿 勢(8)に 移 行 す る.そ の 後,各 関 節 を伸 展 さ せ(9)起 き上 が り運 動 が 達 成(10)さ れ る. 本 研 究 で は腰 お よ び 足 関 節 回 りの 回 転 中 に は 姿 勢 を一 定 に保 つ と仮 定 す るが,回 転 中 に積 極 的 に 姿 勢 を 変 化 させ て 起 き上 が れ る条 件 を 緩 和 す る 方 法 も考 え ら れ る.腰 回 りの 回転 で は そ の 回転 軸 に ア クチ ュエ ー タ は 存 在 せ ず,ま た足 関 節 ま わ りの 回 転 で は 足 部 の 長 さ を歩 行 系 で は 短 く取 る た め 足 関 節 トル ク は 起 き上 が り運 動 に は 利 用 で き な い.こ の よ う な系 の 制 御 はAcrobot[7] で 代 表 さ れ る 劣 駆 動 系 と して 扱 わ れ て い る.そ こ で は非 線 形 性 を う ま く利 用 し て 制 御 系 を 構 成 す れ ば 収 束 性 が 保 証 で き る.そ の 半 面,実 際 の 応 用 で は,制 御 変 数 の 変 換 に計 測 の 難 しい 物 理 パ ラ メ ー タが 多 く入 り所 定 の 状 態 量,例 え ば角 運 動 量 な ど を 正 確 に 得 る こ と が 困 難 な こ と,起 き上 が りの 運 動 は 速 度 が 速 い た め 非 線 形 制 御 を行 う時 間 が 非 常 に 短 い こ と,ま た 短 時 間 で 収 束 性 を 高 め る に は ゲ イ ン を 上 げ る必 要 が あ る が,実 際 の ロ ボ ッ ト 制 御 で は振 動 の 原 因 と な る た め そ れ ほ ど ゲ イ ンが 上 げ られ な い こ と が 問 題 と な る.そ れ よ り も解 析 の 容 易 な条 件,す な わ ち 回 転 中 の 姿 勢 は一 定 で あ る と い う条 件 を 課 して,起 き上 が り運 動 の 計 画 の た め の お お よ そ の 方 針 を 与 え る ア プ ロ ー チ を こ こで は 選 ん だ. 回 転 中 の 姿 勢 が 一定 で あ る こ と を 仮 定 す る と,Fig.2(3)で 減 速 しは じめ る直 前 の 脚 の 速 度(角 運 動 量)の 大 き さ に よ っ て, 起 き上 が り運 動 の 可 否 を 判 定 す る こ とが で き る.つ ま り,こ れ が 適 当 で な く,速 す ぎ る と前 方 へ,遅 す ぎ る と 後 方 へ 倒 れ て し ま う.特 に,最 低 限 必 要 な 速 度 の 条 件 を ク リ ア で き れ ば,起 き 上 が る の に 十 分 な 性 能 を ロ ボ ッ トが 保 持 して い る こ と と な る た め,こ れ を明 ら か に す る こ と は有 用 で あ る.以 降 の 解 析 で は,起 き上 が り に必 要 な脚 の 振 り降 ろ し時 の 速 度 条 件 を 議 論 して い く. な お,Fig.2(8)∼(10)へ は 静 的 安 定 が 保 た れ た 条 件 下 で の 移 行 で あ る.し た が っ て,実 現 は比 較 的 容 易 で あ る と考 え,こ こ で は取 り上 げ な い. 2.2角 運 動 量 に 基 づ い た 解 析 2.2.1方 針 回 転 中心 に よ る ダ イナ ミク ス の 違 い に よ り,腰 回 りの 回転,腰 か ら足 関 節 へ の 回 転 中 心 の 移 動,足 関 節 回 りの 回 転 の 各 相 に 分 け て 解 析 す る.解 析 で は,保 存 量 と して 利 用 で き る 角 運 動 量 に 着 目す る.足 部 の 長 さが 決 ま る と,そ の足 部 で 静 止 で き る 足 関 節 回 りの 回 転 時 の 角 運 動 量 の 範 囲 を 求 め る こ とが で きる.こ の 角 運 動 量 の 範 囲 を脚 の 振 り降 ろ し時 に 還 元 して い く.し た が っ て,解 析 は し ゃが ん だ 姿 勢 か ら 逆 方 向 に 向 か っ て 行 う こ と に な る.Fig.3に 解 析 の モ デ ル と記 号 表 記 を 示 す.Fig.2 A stand-up motion model for analysis
934 伊 藤 聡 阪 圭 央 川﨑 晴 久
Fig.3 Notation used in an analysis
2.2.2足 関 節 回 りの 回 転 足 関 節 回 りの 回転 の 開 始(start)時 に お い て,し ゃ が ん だ 状 態 へ の 移 行 に必 要 とな る 角 運 動 量L(S)Aの 範 囲 を 求 め る.ま ず 勢 い が 足 らず 後 方 に戻 って く る こ とが な い よ うL(s)Aの 下 限 を 求 め る.そ の た め に は 重 心 が 踵 の 真 上 ま で 到 達 で き れ ば よ い.足 関 節 回 りの 回転 で は 姿 勢 は 一 定 と仮 定 した た め,運 動 は 倒 立 振 子 と し て考 え る こ とが で き る.足 関 節 回 りの 回 転 開 始 時 に お け る 重 心 と 回 転 中 心 を結 ぶ 直 線 の 鉛 直 方 向 か ら の 傾 き を θ(s)A,重心 が 踵 の真 上 に きた と きの 傾 き を θ(f)Aとお く と,付 録Aよ り 〓(1) とな る.こ こ でMは 身 体 モ デ ル の 質 量,IAは 足 関 節 回 りの 慣 性 モ ー メ ン ト,gは 重 力 加 速 度,lAは 足 関 節 す な わ ち 回 転 中心 か ら重 心 ま で の 距 離 で あ る. 次 に,勢 い 余 っ て 前 方 に 倒 れ る こ と の な い よ うL(s)Aの 上 限 に つ い て 考 え る.重 心 が 足 関 節 の 真 上 に 到 達 し た 時 点 で 足 関 節 を 固 定 す る と,勢 い の あ る 場 合 は 爪 先 回 りで 回 転 を起 こ す.そ の と き の 角 運 動 量 をL(s)T,重 心 と爪 先 を結 ぶ 直 線 の 長 さ をlT,そ
の直線 が鉛 直 方向 となす 角 を θ(s)Tと
す る と,付 録Aよ
り
〓(2) で あ れ ば よ い.さ て,爪 先 回 りの 回転 が 始 ま る に は,回 転 中 心 が 足 関 節 か ら移 動 す る必 要 が あ る.こ の と き 回 転 中 心 回 りの 角 運 動 量 は変 化 す る.付 録Bの 解 析 を 用 い る と,足 関 節 回 りの 回 転 終 了(finish)時 の 足 関 節 回 りの 角 運 動 量L(f)TとL(s)Tと の 間 に は 〓(3) と い う 関係 が 成 り立 つ.こ こ で,IGは 重 心 回 りの 慣 性 モ ー メ ン トで あ る.さ ら に そ の前 に は 足 関 節 回 りの 回転 が 起 こ っ て い る. 倒 立 振 子 の位 相 面 で の 軌 道 は次 式 で 表 され る ハ ミル トン系 と し て さ れ る. 〓( 4) 終 了 時 に は,重 心 の 角 度 は θ(f)Aで角 運 動 量 がL(f)Aで あ る か ら, ハ ミル トニ ア ンが 〓(5) の 値 を もつ 軌 道 と な る.こ れ を利 用 す る と足 関 節 回 りの 回 転 開 始 時 の 角 運 動 量L(s)Aが 計 算 で き る.そ の と きの 重 心 の 傾 斜 角 度 は θ(s)Aであ る か ら 〓( 6) 式(2),(3),(6)よ りL(s)T,L(f)Aを 消 去 す る と 〓(7) を得 る. 2.2.3腰 か ら踵 へ の 回 転 中 心 の 移 動 腰 回 りの 回 車云終 了 時 に必 要 な 角 運 動 量L(f)Hの 範 囲 を 求 め る. 付 録Bの 解 析 よ り,L(f)HとL(s)Aの 関 係 は 〓(8) とな る.lHは 腰 部 す な わ ち回 転 中 心 か ら重 心 まで の 距 離,θ(f) Hは腰 回 りの 回 転 終 了 時 にお け る 重 心 の 傾 斜 角 で あ る.し た が っ て 〓(9) が 得 ら れ る. 2.2.4腰 回 り の 回 転腰 回 りの回転 が始 まる瞬 間の 角運動 量 をL(s)Hジ
とす る.腰 回 り
の 回 転 は 脚 の 振 り降 ろ し を止 め る た め の 腰 関 節 の トル クが 上 体 に 作 用 し,そ の 結 果 上 体 が 起 こ され る こ と に よ っ て 実 現 さ れ る. この と き腰 回 りの 全 体 の 角運 動 量 は,腰 関 節 に働 く トル ク に よ っ て は 直 接 的 に は 変 化 しな い.し か し,そ れ に よ り 重心 位 置 が 変 化 す る た め,重 力 の 働 き に よ り間 接 的 に 変 化 して し ま う.角 運 動 量 の 変 化 は外 力 に よ る モ ー メ ン トに 等 しい か ら,そ れ を積 分 す る こ と に よ り腰 回 りの 回転 で の 変 化 量 △Lは 〓脚 の 振 り降 ろ しを利 用 した 起 き上 が り運 動 に お け る角 運 動 量 条 件 935 で 与 え ら れ る.X(t)は 回 転 中 心 す な わ ち 腰 部 を原 点 と し足 側 を 正 の 座 標 系 と と っ た と き の 重 心 の 水 平 座 標 値,t(s)Hお よ びt(f)Hは そ れ ぞ れ 腰 回 り回 転 の 開 始 お よ び 終 了 時 刻 で あ る. こ こ で 水 平 方 向 の 重 心 軌 道 は,腰 回 り回 転 の 初 期 値X(s)Hと 終 了 値X(f)Hの 間 も し くは そ の 近 傍 で 変 化 す る と仮 定 し,△Lを 〓(11) の 範 囲 で 近 似 す る.上 式 に お い てXlargeはX(s)Hお よ びX(f)Hの うち の 大 き い 方,Xsmallは 小 さ い 方 で あ り,△T(=t(f)-t(s)H) は 腰 回 り回 転 の 時 間 で あ る.近 似 の 妥 当 性 に つ い て は 第3.4節 に お い て 考 察 す る.こ の 近 似 に よ る と腰 回 りの 回 転 終 了 時 の 角 運 動 量L(f)Hは 〓(12) の 範 囲 に存 在 す る.式(12)で 与 え られ るL(f)Hは,式(9)の 条 件 を 満 た さ な け れ ば な ら な い.そ の た め に 必 要 なL(s)Hの 条 件 を 両 式 よ り算 出 す る と, 〓(13) で 与 え られ る.こ のL(s)Hの 上 限 お よ び 下 限 をL(s)Hmax,L(s)H minとお く.脚 の振 り降 ろ しで 得 られ る 角 運 動 量Llegは そ の ま ま腰 回 りの 回 転 の 角 運 動 量 の 初 期 値,す な わ ちLleg=L(s)Hジ で あ る
か ら,し ゃが ん だ姿勢 を達 成す る ため に必要 な脚 の振 り降 ろ し
時 の角運動 量 は
〓(1 4) で あ る.腰 関 節 回 りの 脚 部 の 慣 性 モ ー メ ン トをIlegと お け ば, 脚 の 振 り降 ろ し時 の 角 速 度 ω の 範 囲 が 〓 (15) と し て 与 え られ る. 3.シ ミ ュ レ ー シ ョ ン と 実 験 3.1シ ミ ュ レ ー シ ョ ン ・モ デ ル 第2.2節 で 展 開 し た起 き 上 が り運 動 解 析 の 検 証 を行 う た め に シ ミュ レ ー シ ョ ン を 行 っ た.シ ミ ュ レー シ ョ ンで は,第3.5節 で 述 べ る ロ ボ ッ トに 基 づ い た モ デ ル を 用 い る.し か し,足 部 に つ い て は,床 と の 接 触 の 扱 い を 容 易 に す る た め,以 下 の よ う な 単 純 化 を行 っ た.床 と の接 触 を簡 単 に す る に は 足 部 を無 視 した 3リ ン ク系 と して 扱 う方 法 が あ る.し か し,足 部 の 質 量 は 脚 の 振 り降 ろ し時 の 慣 性 モ ー メ ン トに 影 響 を与 え る た め,こ の 場 合 は 適 切 で は な い.そ こで,足 部 は 大 き さ0,慣 性 モ ー メ ン トが 十 分 小 さ い(0.000001)の 質 点 と考 え た.そ の 他 の リ ン ク の 長 さお よ び 質 量 はTable2に 従 う.慣 性 モ ー メ ン トは足 部 以 外 は 均 質 な 線 密 度 を 持 つ 剛 体 と して 概 算 した. 3.2起 き 上 が り運 動 時 の 姿 勢 の 設 定 足 関 節 回 りの 回 転 中 で は,し ゃが ん だ状 態 に とるべ き腰 お よび 膝 関 節 角 度 を あ ら か じめ 実 現 しそ れ を 維 持 す る が,こ の と き回 転 中 心 回 りの 慣 性 モ ー メ ン トが 小 さ く な っ た 方 が 起 き上 が り に は 有 利 で あ る.そ こ で,両 関 節 と も140[deg]屈 曲 させ た 状 態 を し ゃが ん だ 姿 勢 と して 指 定 し た.ロ ボ ッ トで は 関 節 を160[deg] ま で 屈 曲 させ る こ とが で き る が,可 動 限 界 の 値 を設 定 す る と無 理 な力 が 加 わ っ た 場 合 に 破 損 し や す い た め,少 し余 裕 を も たせ た 値 を 与 え た. 脚 の 振 り降 ろ し時 に は 膝 関 節 を 伸 展 させ 慣 性 モ ー メ ン トを 大 き く させ た 方 が 必 要 な 角 運 動 量 を得 る に も小 さ な 角 速 度 で す み, 短 時 間 で の 急 激 な加 速 を少 しで も減 らす こ とが で きる.し た が っ て,振 り降 ろ し時 の 脚 の 角 速 度 は,膝 関 節 を真 っ直 ぐ に 伸 展 さ せ た状 態 で 計 算 した.ま た,腰 回 転 中 の 角 運 動 量 変 化 を 見 積 も る に は 脚 を 振 り降 ろ す 瞬 間 の 腰 関 節 角 度 を 指 定 しな け れ ば な ら な い.腰 関 節 を 伸 展 さ せ る ほ ど重 心 が 足 側 に移 動 し,起 き上 が り に は 有 利 で あ る.し か し,伸 展 させ す ぎ る と振 り降 ろ し た 脚 の 運 動 を 静 止 させ る 前 に足 先 が 地 面 につ い て し ま う,あ る い は 腰 回 り 回転 の 短 時 間 内 に と る べ き し ゃが ん だ姿 勢 が 腰 の 屈 曲 量 の 増 大 に よ り実 現 で きな い とい う状 況 が 生 じ,そ れ ほ ど伸 展 さ せ た 姿 勢 を与 え る こ と もで き な い.そ こ で,こ こ で は 脚 が 鉛 直 状 態(腰 関 節 の 屈 曲90度)と 水 平 状 態(0度)の 中 間 と な る 腰 関 節 の 屈 曲 が45度 の姿 勢 を 指 定 した.し ゃが ん だ 姿 勢 と脚 を 振 り降 ろ す 瞬 間 の 二 つ を指 定 す る こ と に よ りXlargeとXsmallが 計 算 で きる. 本 稿 で 製 作 し た 起 き上 が りロ ボ ッ トで は,足 関 節 か ら爪 先 ま で の距 離(8[cm])を 比 較 的 長 く と っ た.そ こで 勢 い 余 っ て 前 方 に倒 れ る こ とは 少 な い と考 え,特 に 起 き上 が り に 角 速 度 の 下 限 値 の み を計 算 す る. 3.3条 件 設 定 シ ミュ レー シ ョ ンで は,膝 関 節 を伸 ば し腰 関 節 を90度 屈 曲 さ せ た 状 態 を初 期 状 態 と して 与 え た.そ して 脚 の 振 り降 ろ しに 続 い て 起 き る腰 回 り回 転 の 時 間 を △Tと し,そ の 時 間 内 に は し ゃ が ん だ姿 勢 が と れ る よ う運 動 を 指 定 す る.こ の と き不 用 意 に 膝 関 節 を屈 曲す る と足 部 が 地 面 に接 地 して し ま う た め,腰 関 節 と 足 関 節 の 屈 曲 の タ イ ミ ン グ を 工 夫 し た.そ の 後 はFig.2の よ う に 第3.2節 で 指 定 した 姿 勢 を 維 持 す る.起 き 上 が りは 踵 と 上 体 重 心 と の 水 平 距 離 が,足 関 節― 踵 間 の 長 さ3[cm]の 範 囲 に 入 っ た 場 合 に 成 功 と み な し,シ ミュ レ ー シ ョ ン を 終 了 す る.数 値 計 算 に は4次 のRunge Kutta法 を き ざ み 時 間0.1[ms]で 用 い た. 3.4計 算 結 果 と シ ミ ュ レ-シ ョ ン 以 上 の 設 定 の も と 第2.2節 の 解 析 に 従 っ て計 算 し た 各 変 数 値 をTable1に 示 す.な お,使 用 した モ デ ル で は 足 部 が 質 量 を も ち,足 部 の 接 地 に よ りそ の 運 動 量 が す べ て 失 わ れ る.し た が っ て,β の 計 算 は こ れ を 考 慮 し た次 式 を用 い て い る. 〓(16) 記 号〓 は,足 部 を 除 い た 部 分 に 対 して 計 算 した 量 で あ る.ま た, △Tは 付 録Cに 従 い,L(f)Hminと モ ー タ の 最 大 連 続 トル ク値 (TM=0.0284[Nm])よ り見 積 も っ た.こ の と きXmaxの 近 似 値 と してXlargeを 用 い た. 起 き上 が り運 動 は,振 り降 ろ し時 の 角 速 度 が ωminよ り も大 き け れ ば 可 能 な は ず で あ る.そ こ で 角 速 度 の 目 標 値 と して そ れ よ り も少 し大 き な値2.85[rad/s]と した と こ ろ,起 き上 が れ る こ と 日本 ロボ ッ ト学 会 誌21巻8号 107 2003年11月936 伊 藤 聡 阪圭 央 川﨑 晴 久
Table 1 Simulation parameters and calculation results
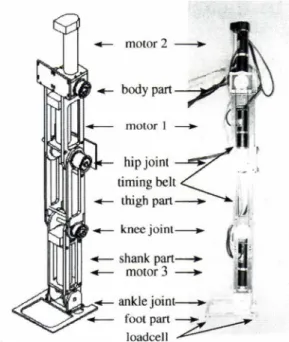
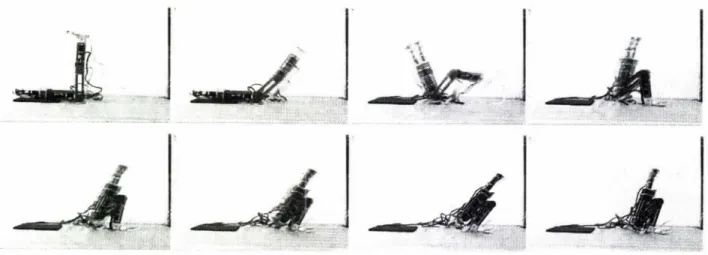
Fig. 4 Simulation result が 確 認 で き た.シ ミュ レー シ ョ ン動 作 で の 角 速 度 は2,84[rad/s] よ り も少 し大 き な 値 で あ っ た.シ ミュ レ ー シ ョ ンで の 回 転 中 心 回 りの 角 運 動 量 の 変 化 をFig.4(a)に 示 す.L(s)AがTable1の L(s)Aminよ り も わ ず か に 大 き な 値 で あ る こ と,L(f)HとL(s)Aの 比 (0.250/0.224=1.12)が β に 近 い こ と な ど シ ミュ レ ー シ ョ ン と計 算 値 は よ く 一 致 し て い る.Fig.4(b)は,腰 回 転 時 の 回 転 中 心 を 原 点 と した と きの 重 心 の 水.平座 標 の 時 間 変 化 を 示 して い る.網 の か か って い な い 部 分t∈[0.5052,0.7062]が 腰 回 り回 転 で,ハ ミル トニ ア ンで は 運 動 が 規 定 で き な い 範 囲 で あ る.重 心 はXsmall=0.0205とXlarge=0.0223の 範 囲 に は お さ ま っ て は い な い が,角 運 動 量 の 変 化 を 評 価 す る の は式(10)の よ う に 積 分 値 す な わ ち 水 平 座 標 軸 と作 る部 分 の 面 積 で あ る.腰 回 転 開 始 時 お よ び 終 了 時 に は,全 体 が 腰 を 中 心 に起 き上 が り方 向 に 回 転 して い る た め,重 心 の 水 平 座 標 の 変 化 速 度 は と も に正 で あ る. した が っ て,水 平 座 標 の 時 間 変 化 はFig.4(b)の よ う に 増 加 の あ と減 少 しそ の 後 また 増 加 す る と い う 波(∼)型 を 示 す.特 に 腰 回 転 時 の 運 動 つ ま り膝 を 伸 ば して 振 り降 ろ す 姿 勢 か ら し ゃ が ん だ 姿 勢 まで の 変 化 を う ま く設 計 す れ ば,Fig.4(b)の よ う に対 称 性 の 高 い 軌 道 と な る.こ れ を 積 分 す る と,多 くの 場 合 初 期 値 お よ び 終 了 値 の 間 の 値 で 近 似 で き る.こ の シ ミュ レ ー シ ョ ン で も,曲 線 の 作 る 部 分 の 面 積 △L=0.072(=0.250-0.178)は, 水 平 線Xsmnllと/Ylargeが 作 る 長 方 形 の 面 積(MgXsmall△T= 0.069,MgXlarge△T=0.075)で 上 下 が 抑 え ら れ て い た.し た が っ て,腰 回 転 中 の 角 運 動 量 に つ い て 本 稿 で 提 案 した 方 法 で 妥 当 な評 価 が で き て い る こ と に な る. 3.5ロ ボ ッ トに よ る 実 験 実 験 で はFig.5の よ うな4リ ン ク3関 節 ロ ボ ッ トを利 用 す る. 腰 ・膝 お よ び 足 関 節 は 、 同 じ性 能 のDCモ ー タ(20[W],ギ ア 比 約53:1)を 使 用 して い る.DCモ ー タに はエ ン コ ー ダが 装 着 さ れ,各 関 節 変 位 が 検 出 で き る.ま た,足 部 が 床 面 に接 地 した こ と を判 断 で き る よ う,足 部 の 各 隅 に 床 反 力 を 測 る 力 覚 セ ンサ (ロ ー ドセ ル 〉 を装 着 し て い る.Table2に 各 部 の リ ン ク の 質 量,長 さ を 示 す.足 関 節― 踵 間3[cm],足 関 節― 爪 先 間8[cm] で,足 関 節 の 高 さ は3[cm]で あ る. 実 験 は シ ミュ レー シ ョン と 同 様 の 初 期 状 態 か ら行 っ た.制 御 と し て は 設 定 した 角速 度 が で る よ う な 目標 軌 道 を 作 成 し,そ れ に
Fig. 5 Designed robot for stand-up motion
脚 の振 り降 ろ し を利 用 した 起 き上 が り運 動 にお け る角 運 動 量 条 件 937
Fig. 6 Robot experiment
Table 2 Mass and length of each link
Fig. 7 Trajectories of hip and knee joint angle in robot
experi-ment
対 す る 非 線 形 補 償 な しの 関 節 空 間 高 ゲ イ ンPD制 御 を行 っ た.ゲ イ ン は 振 動 が 起 きな い 最 も大 きい も の を選 ん だ.角 速 度 が ωmin よ り も大 き け れ ば 起 き上 が れ る こ と,慣 性 モ ー メ ン トな ど の い くつ か の パ ラ メ ー タ は そ の 真 値 が 正 確 に は 分 か ら な い こ と,制 御 で の 位 相 遅 れ な ど を考 慮 し,目 標 角 速 度 と して,ωminよ り大 き く き り の よ い 値3.0[rad/s]を 設 定 した と こ ろ,し ゃが ん だ 姿 勢 に 到 達 で き た.そ の と き の 様 子 をFig.6に 示 す.Fig.7は モ ー タの エ ン コ ー ダ 値 よ り得 ら れ た 腰 お よ び 膝 関 節 角 度 の 変 化 で あ る.差 分 に よ り角 速 度 は 目標 の3.0[rad/s]以 上 は で て い る こ と を 確 認 した. 4.お わ り に 本 稿 で は,仰 向 け状 態 か ら 直 立 状 態 へ の 脚 の振 り降 ろ し を 利 用 し た 起 き 上 が り運 動 に つ い て 考 察 して き た.運 動 の 成 否 は 脚 の 振 り降 ろ し時 の 角 速 度 で 決 ま る と考 え,そ の 値 を 角 運 動 量 に 基 づ い て 計 算 す る 方法 を提 案 した.シ ミ ュ レ ー シ ョ ンお よ び実 験 に よ り,提 案 した 方 法 の 妥 当性 ・有 効 性が 示 され た.こ の 方 法 は,倒 立 振 子 モ デ ル に基 づ い た 位 相 面 解 析 と 角 運 動 量 保 存 則 に基 づ い て い る.計 算 時 に 問 題 に な る の は,腰 回 りの 回 転 中 に 系 全 体 が 重 力 か ら受 け る影 響 を ど う評 価 す る か で あ る.本 稿 で は,重 心 の 水 平 位 置 の 初 期 状 態 ・終 了 状 態 を 用 い て そ れ を概 算 す る 方 法 を と っ た.こ れ に よ り ダ イナ ミ ク ス を解 く こ と な く必 要 な 角 速 度 を 見 積 も る こ とが で き る よ う に な っ た.た だ し,腰 回 りの 回 転 が 長 い 場 合 や 重 心 の 軌 跡 が 複 雑 に な る場 合 に つ い て は 改 良 す べ き 点 が 残 さ れ て い る と考 え る. 謝 辞 本 研 究 は,日 本 学 術 振 興 会 科 学 研 究 費 補 助 金 (13750215)の 補 助 を う け た.こ こ に 感 謝 の 意 を表 し ま す.参
考
文
献
[1] 中 久喜 一雄,山 藤 和 男:“ 曲 率 を も つ3つ の リ ン ク で 構 成 さ れ た ロ ボ ッ トの 運 動 制 御(第一 報,ロ ボ ッ トの コ ン セ プ ト と ダ イ ナ ミ ッ ク な 制 御)”,日 本 機 械 学 会 論 文 集(C編),vol.58, no.555, pp3299-3306, 1992. [2] 中 久 喜一 雄,山 藤 和 男:“ 曲 率 を も つ3つ の リ ン ク で 構 成 さ れ た ロ ボ ッ トの 運 動 制 御(第二 報,ロ ボ ッ ト の さ ま ざ ま な 動 作)”,日 本 機 械 学 会 論 文 集(C編),vol.59, no.559, pp.850-854, 1993, [3] 森 本 淳,銅 谷 賢 治:“ 強 化 学 習 を 用 い た 高 次 元 連 続 状 態 空 間 に お け る 系 列 運 動 学 習― 起 き上 が り 運 動 の 獲 得 ”,電 子 情 報 信 学 会 誌, vol.J82-D-II, no.11, pp.2118-2131, 1999. [4] 金 広 文 男,稲 葉 雅 幸,冲上 博 充:“ 倒 れ て も 起 き あ が る こ と の で き る 人 間 型 ロ ボ ッ ト”,第13回 日 本 ロ ボ ッ ト学 会 学 術 講 演 会 予 稿 集,vol.1, pp.195-196, 1995. [5] 高 橋 正 仁,宮 腰 清 一,國 吉 康 夫,柿 倉正 義:“ 振 動 子 を 用 い た 脚 の 振 り に よ り 引 き 起 こ さ れ る 身 体 の 振 り の 制 御”,第19回 日 本 ロ ボ ッ ト学 会 学 術 講 演 会 講 演 論 文 集,pp.1151.1152, 2001. [6] http://www.sony.co.jp/[7] M.W. Spong: •gThe swing up control problem for the acrobot,•h
IEEE Control Systems, pp.49-55, 1995.
付録A.倒
立 振子 の角運動量 と転倒 方向
倒立 振子 の運 動 の位相 面上 の振 舞 いは
〓(A.1) で 定 義 さ れ る ハ ミル トニ ア ン の 大 き さ に よ り区 別 で き る.こ こ でIは 転 倒 中 心 回 りの 倒 立 振 子 の 慣 性 モ ー メ ン ト,Lは 回 転 中 心 回 りの 角 運 動 量,θ は.重心 と 回 転 中 心 を結 ん だ 直 線 が 鉛 直 方 向 か ら な す 角 度,Mは 倒 立 振 子 の 質 量,gは 重 力 加 速 度,lは 回 転 中心 か ら重 心 ま で の 距 離 で あ る.回 転 中心 の 真 上 にあ る 不 安 定 平 衡 点 す な わ ち位 相 面 の 原 点 を 通 る 軌 道 は,θ=L=0を 代 入 す る こ と に よ り,ハ ミル トニ ア ンの 値 が 日本 ロボ ッ ト学 会 誌21巻8号 109 2003年11月938 伊 藤 聡 阪 圭 央 川﨑 晴 久
Fig. 8 Behavior on phase plane
H=Mgl≡H0(A.2) と して 規 定 で き る.し た が っ て,Fig.8に 示 す よ う に,H>H0 の 場 合 は倒 立 振 子 は 不 安 定 平 衡 点 を通 り越 して 前 方 へ 倒 れ,一 方H<H0の 場 合 は 不 安 定 平 衡 点 を超 え ら れ ず 後 方 に 転 倒 す る. この ハ ミル トニ ア ンで 表 され た 関 係 を角 運 動 量 で 表 現 し て み る. 原 点 を通 る 軌 道 は 〓(A.3) で あ る.右 辺 第2項 を左 辺 に 移 行 し,両 辺 に21を か け た後 平 方 を と る こ と に よ り,原 点 を通 る 場 合 の 角 運 動 量 は θの 関 数 と して 〓( A.4) で 表 さ れ る.し た が っ て,角 運 動 量 がL0(θ)よ り大 きい か 小 さ い か に よ っ て,前 方 か 後 方 か の ど ち ら に倒 れ る か が 判 定 で き る. な お,重 心 が 真 上 まで 到 達 す る必 要 が な く,手 前 の 鉛 直 方 向 か らの 角 度 ρま で で よ い場 合 は,式(A.4)は 〓(A.5) で 置 き換 え ら れ る.
付録B.回
転 中心の変化 と角運動量
点O_を 中 心 に し て 床 面 上 を 回 転 した ロ ボ ッ トが 床 面 と衝 突 を お こ し,そ の 後 回 転 中 心 がO+に 変 化 した 場 合 を 考 え る.こ の と き,ロ ボ ッ トの 各 関 節 角 度 は 一 定 に保 た れ て い る と仮 定 し て 剛 体 と考 え,そ の 質 量 をM,重 心 回 りの 慣 性 モ ー メ ン トを1 と お く.Fig.9に 示 す よ う に,衝 突 前 後 に お い て,各 回 転 中 心 回 りの 重 心 の 角 速 度 を ω_お よ び ω+,回 転 半 径 をr_お よ びr+, 重 心 の 速 度 をv-お よ びv+,各 回 転 中 心 回 りの 角 運 動 量 をL_ お よ びL_と お く と, 〓(B.6) 〓( B.7) で あ る.衝 突 時 に 加 わ る 撃 力 は 点O+の み か ら働 くた め,O+ 回 りで の 角 運 動 量 は 衝 突 前 後 で 保 た れ る.し た が っ て,重 心 と 点O1お よび 点O2を 結 ぶ 直 線 が鉛 直 方 向 か ら な す 角 度 をそ れ ぞ れ θ-お よ び θ+と そ れ ぞ れ お く と, 〓(B.8) が 成 り立 つ.式(B.6)を 代 入 し,ω_に つ い て 解 く と 〓(B.9) と な り,こ れ を 式(B.7)に 代 入 し て 〓(B.10) の 関 係 を得 る.Fig. 9 Anguler momentum changing with rotation center
付 録C.腰
回 りの 回 転 時 間
腰 回 りの 回転 終 了 時 の 角運 動 量L(f)Hが 与 え られ た とす る.モ ー タ の 最 大 連 続 トル ク τMよ り,腰 回 り の 回 転 時 間 △Tが 最 低 ど の く らい 必 要 か を計 算 す る.重 力 や 腰 関 節 トル クの 影 響 が な け れ ば,腰 回 りの 角 運 動 量 は保 存 さ れ る.こ の 場 合,脚 の 振 り降 ろ し時 の 角 運 動 量 は 腰 回 り回 転 終 了 時 と等 し くL(f)Hで あ っ た と 考 え る こ とが で き る.し か し,実 際 に は こ れ に重 力 の 影 響 が 加 わ る.回 転 中 の 重 心 軌 道 に お け る 回 転 中 心 か ら の 水 平 距 離 の 最 大 値 をXmasと す る と,重 力 に よ る 角 運 動 量 の 増 加 量 は MgXmax△T(C.11) よ り大 き くは な ら な い.振 り降 ろ し た 脚 を 止 め る こ と は,こ の 重 力 の 影 響 を 加 味 し た 角 運 動 量 を腰 関 節 の トル クで △T間 に打 ち 消 す こ と とな る た め 〓( C.12) で あ れ ば よ い こ と と な る.上 体 を 支 え ら れ る と 仮 定 す る と TM-MgXmaxは 正 で あ る必 要 が あ る の で,上 式 を △Tに つ い て 解 く と 〓(C.13) が 得 られ る.な お,こ の 式 で は常 に 最 大 トル クが 出 せ る と 仮 定 して い る た め,実 際 に は こ れ よ り も大 きめ の 値 が 必 要 と な る. JRSJ Vol.21 No.8 110 Nov.,2003脚 の 振 り降 ろ しを利 用 した 起 き上 が り運 動 に お け る 角 運 動 量 条 件 939 伊 藤 聡(Satoshi Ito) 1968年12月10日 生,1991年 名 古 屋 大 学 工 学 部 情 報 工 学 科 卒 業.1993年 同 大 学 大 学 院 工 学 研 究 科 博 士 課 程 前 期 課 程 修 了.1994年 よ り理 化 学 研 究 所 バ イ オ ・ ミ メ テ ィッ ク コ ン トロ ー ル 研 究 セ ン タ ー に 勤 務.1999年,岐 阜 大 学 工 学 部 助 手,現 在 に 至 る.工 学 博 士.計 測 自 動 制 御 学 会,IEEEな ど の 会 員. (日 本 ロ ボ ッ ト学 会 正 会 員) 阪 圭 央(Yoshihisa Saka) 1980年3月9日 生.2002年 岐 阜大 学 工 学部 機 械 工 学 科卒 業,現 在 同大学 院 工 学研 究科 機械 シ ステ ム工 学 専 攻博 士 前 期 課程 在 学 中. 川﨑 晴 久(Haruhisa Kawasaki) 1949年6月27日 生.1974年 名 古 屋 大 学 大 学 院 工 学 研 究 科 修 士 課 程 修 了,同 年 日本 電 信 電 話 公 社(現 NTT)入 社,1990年 金 沢工 業 大 学 教 授.1994年 8月 よ り岐 阜 大 学 工 学 部 教 授,現 在 に 至 る.ロ ボ ッ ト制 御,バ ー チ ャ ル ・リ ア リ テ ィ応 用 ロ ボ テ ィク ス な ど の 研 究 に 従 事,計 測 自 動 制 御 学 会,日 本 機 械 学 会,日 本 バ ー チ ャ ル ・リ ア リ テ ィ学 会,IEEEな ど の 会 員.工 学 博 士.(日 本 ロ ボ ッ ト学 会 正 会 員) 日本 ロボ ッ ト学 会誌21巻8号 111 2003年11月