個別適合型運転診断・支援サービスを搭載した常時記録型
ドライブレコーダの開発と公道実証実験(FOT)
― 平成 23 年度(本報告) タカタ財団助成研究論文 ―
研究代表者
永井 正夫
研究実施メンバー
研究代表者
東京農工大学
工学府
機械システム工学専攻
教授
永井
正夫
研究協力者
東京農工大学
工学府 機械システム工学専攻 助教
林
隆三
東京農工大学
工学府 機械システム工学専攻 教務職員
池西
俊仁
東京農工大学
工学府 機械システム工学専攻 准教授
ポンサトーン
ラクシンチャラーンサク
東京農工大学
工学府 機械システム工学専攻 助教
佐藤
桂
報告書概要
すべてのドライバに対し適切な運転支援を行う個別適合型運転支援システムの開発を目 的とした.特に追突事故の防止の観点から先行者追従走行場面に着目し,先行車の速度を 用いてドライバの通常運転を再現する規範運転操作モデルを構築した.さらに構築した規 範運転操作モデルと実際の走行データの比較から,規範運転操作モデルとの誤差の分布を 評価することで,注意力低下状態を検出できる可能性を示し,更にその分布の時間変化を 見ることで,注意力低下状態をリアルタイムに検出できる可能性を示した. また都内のタクシー会社に協力を得てドライブレコーダで計測したタクシードライバの 運転データとフィールド実験により得た一般ドライバのデータとを比較し,個人の運転ス タイルの抽出を運転経験と平均車間時間,車間距離の関連の調査により試みた.さらに, 運転行動のような個人差,経験差などによってモデルパラメータがばらつくような個別の 要因を扱う複雑なモデルにも適用可能である階層ベイズ法を用いモデル化を行い,交通事 故発生の大きな原因の一つである急ぎ運転に着目し,この急ぎ運転がどのような特徴量に 関連しているか調査を行った.その結果,減速時の低い速度域以外では良好な急ぎ運転状 態を推定することが可能となった.また,いつもの運転と急ぎ運転に関連する特徴量が, 加速と減速で異なること,また特徴量は個人によって異なっていることが明らかとなった.目次
個別適合型運転診断・支援サービスを搭載した常時記録型ドライブレコーダの開発と公道 実証実験(FOT) 第1 章 緒言 1.1 研究背景 ・・・1 1.2 目的 ・・・3 第2 章 個別適合型運転診断システムの開発 2.1 実験車両および計測機器 ・・・5 2.2 実験コースおよび被験者 ・・・6 2.3 先行車追従走行場面の分析 ・・・7 2.4 規範運転操作モデル ・・・8 2.4.1 通常時の車間距離 ・・・10 2.4.2 ペダル操作ゲイン ・・・12 2.5 規範モデルの妥当性 ・・・13 2.6 注意力低下運転の診断 2.6.1 モデル誤差の分布 ・・・13 2.6.2 通常運転時 ・・・14 2.6.3 注意力低下時 ・・・17 2.6.4 ペダル操作ゲインの時間変化 ・・・20 2.6.5 通常運転時 ・・・21 2.6.6 注意力低下時 ・・・26 2.7 車間距離誤差に基づく運転診断 2.7.1 通常運転時の診断結果 ・・・32 2.8 結言 ・・・37第3 章 常時記録型ドライブレコーダを用いた公道実験 ―個人の運転スタイル抽出のための基礎的検討― 3.1 実験車両および計測機器 ・・・38 3.2 実験コースおよび被験者 ・・・39 3.3 熟練度に対する考察 ・・・40 3.4 個人特性に対する考察 ・・・44 3.5 結言 ・・・46 ―階層ベイズ法による急ぎ運転状態の推定― 3.6 実験コースおよび被験者 ・・・46 3.7 急ぎ運転状態推定手法 ・・・47 3.8 急ぎ運転状態の推定 ・・・49 3.9 急ぎ運転に関連する特徴量の調査 ・・・54 3.10 結言 ・・・57 第4 章 まとめ ・・・58 参考文献 ・・・60
1
第 1 章
緒言
1.1 研究背景 2011 年における日本の交通事故による死者数は 4,611 人であり 11 年連続の減少となった (図 1.1.1) [1].これは衝突安全技術や医療の進歩などにより,交通事故による被害が軽減さ れたためであるが,事故発生件数は年間約80 万件と依然高い数値で推移している.図 1.1.2 に1999 年から 2009 年に発生した車両相互事故の類型別の推移を示す[2].1999 年から依然 として追突事故が最も多く,2009 年においては,追突事故が車両相互の事故のうち約 37% と最多で,次いで約30%の出会い頭が多く起こっている.これまでに追突防止を目的とし たシステムがいくつか開発されたが,これらの従来のシステムは,すでに追突の危険が顕 在化した場合に警報やブレーキ操作介入を行うものであった.現在では,危険の顕在化し ていない領域まで範囲を広げ,ドライバの運転行動の変化を視野に入れた高度な追突防止 システムの研究が展開されている. また堀田らは,事故発生時のドライバの心理状況を調査しており,図 1.1.3 に示すように 急ぎ運転が交通事故発生の大きな要因となっていることを報告している[3].交通事故を未 然に防ぐにはドライバの挙動を把握することが重要であるため,ドライブレコーダ(以下 DR)により計測された事故データやヒヤリハットデータを用い,事故原因を客観的に分析 する研究が行われている[4].このような事故前後の車両情報・映像を記録するDR はタクシ ーやトラック等を中心に普及している.事故低減を目的とした予防安全技術の 1 つに,運 転支援システムが挙げられるが,従来のシステムは平均的ドライバを基準とした運転支援 を行うため,一部のドライバには適切な支援ができず,わずらわしいなどの不快感を与え 警告の効果が薄れやすい問題点がある. 本学では,これらの点を踏まえ,ドライバの走行履歴を蓄積し個人の運転の癖を学習す ることで,すべてのドライバに対し適切な運転支援を行う図1.1.4 に示すような個別適合型 運転支援システムの研究を行ってきた[5,6].2
Fig. 1.1.1 Traffic accident transition
Fig.1.1.2 Statistical data of road accidents classified by accident type 0 200,000 400,000 600,000 800,000 1,000,000 1,200,000 1,400,000 0 2,000 4,000 6,000 8,000 10,000 12,000 14,000 16,000 18,000 1950 1960 1970 1980 1990 2000 2010
N
um
ber
o
f acci
den
ts
[-]
C
as
ual
ty
[p
eo
pl
e]
Fa
ta
litie
s [
pe
op
le
]
years
Fatalities (Inside 24H) Casualty Number of accidents 19990 2001 2003 2005 2007 2009 50 100 150 200 250 300 350 Year N um be r of a cc ide nt s [ thous and]Rear-end
Head-on
Turn right
Others
Turn left
3
Fig.1.1.3 Mental state and driving behavior when accident occurred
Fig. 1.1.4 Diagram of individual adaptive driving assistance system 1.2 目的 図1.1.3 によると,事故時のドライバの 35%以上が注意力低下状態であることから,ドラ イバが注意力低下状態に陥った際に運転を支援する必要があると考えられる.すなわち, 高度な運転支援の実現には,車両周囲の物理的な事故発生のリスクに加えて,時々刻々変 化するドライバの運転に対する注意力の変化も考慮しなければならない.図 1.2 に走行環 境の危険度とドライバの運転状態の変化のイメージを示す.たとえば市街地のような走行 環境の危険度が高い状態であっても,ドライバの注意力が高ければ特に支援をする必要が なく,逆に支援を行うことでドライバに支援のわずらわしさを与え,追突防止システムの 事故低減効果を損ねるおそれがある[7-9].一方で,市街地よりも比較的走行環境の危険度が
4
低い高速道路あっても,その危険度を補えないほどドライバの注意力が低い場合には,危 険を回避する適切な支援が必要である.そこで本研究では注意力の低下したドライバを支 援の対象とし,注意力低下状態の検出について検討した.
Fig. 1.2 Target of the individual adaptive driver assistance systems
さらに個人の運転スタイルの抽出を行うため,都内のタクシー会社に協力を得てドライ ブレコーダで計測したタクシードライバの運転データと,フィールド実験により得た一般 ドライバのデータとを比較しこれらのドライバの運転行動の違いを明らかにした.さらに, 運転行動のような個人差,経験差などによってモデルパラメータがばらつくような個別の 要因を扱う複雑なモデルにも適用可能である階層ベイズ法を用いてモデル化を行うことで, 交通事故発生の大きな原因の一つである急ぎ運転に着目し,この急ぎ運転がどのような特 徴量に関連しているか調査を行った.
A
cc
id
en
t R
isk
P
oten
ti
al
Target area
Traffic environment(digital map, surroundings) Driver state
(drowsy, fatigue, hurry)
Low
Bad
(Dangerous)
(Safe)
(Careless)
(Cautious)
Running DistanceD
riv
er
A
tten
ti
on
L
ev
el
High
Good
5
第2章
個別適合型運転診断システムの開発
[10] 予防安全のためのドライバ支援システムの高度化を目指し,実路におけるドライバの運 転データの蓄積から,ドライバ個人の特性および走行環境に適合した運転支援システムの 開発を目的とした.特に追突事故防止の観点から先行者追従走行場面に着目し,ドライバ の普段の運転行動をモデル化することで,注意力低下時の運転行動を検出する手法を提案 した. 2.1 実験車両および計測機器トヨタ自動車株式会社製のCROWN MAJESTA C Type を用いた.本車両には常時記録型 ドライブレコーダ,車間距離計測用レーザーレーダ,GPS ユニットが取り付けられており, 速度,車間距離等の車両情報を記録する. 走行データの記録には,図 2.1 に示す常時記録 型ドライブレコーダを用いた.本システムは大きく分けて「カメラ・画像合成部」,「GPS・ 測位部」,「A/D プローブ部」,「CAN プローブ部」及び「画像同期レコーダ部」の 5 つで構 成される.
Fig.2.1 Hardware configuration of drive recorder
NTSC / DV conversion
RS / USB
conversion USB / HUB
4. PC for DATA RECORDER
1. CAMERA IMAGES
Front, rear, left, right, driver face, legs6-channel image splitter
2. GPS UNIT
Time, longitude, latitude, altitude, vehicle speed, vehicle attitude, odometer
3. VEHICLE DATA SENSORS
Lateral acceleration Steering angle
Longitudinal acceleration Accel. Pedal stroke
Inter-vehicle distance Brake Pedal stroke
6 2.2. 実験コース及び被験者 本研究で実際に走行したコースを図 2.2 に示す.安定した長時間の追従走行における分 析を行うため,中央自動車道調布インターチェンジから河口湖インターチェンジの片道約 85km の実験コースを設定した.本研究ではドライバの注意力低下時の運転を扱うため,運 転開始から30 分~1 時間程度経過した後に発生する眠気に対して,走行するのに約 1 時間 を要するこの実験コースは妥当であるといえる[11].
Fig.2.2 Route for experiment
また本研究では,個人差による運転行動の分析も行うため,2 人のドライバを被験者と してデータ収集を行った.各ドライバの年齢及び運転暦(普通運転免許保有年数),年間走 行距離,自身の自動車保有を表2.2 に示す.
Table 2.2 Characteristics of each driver Driver Age Driving
experience Annual mileage
Automobile ownership A 34 14 years 1,500km × B 23 3 years 12,000km ○
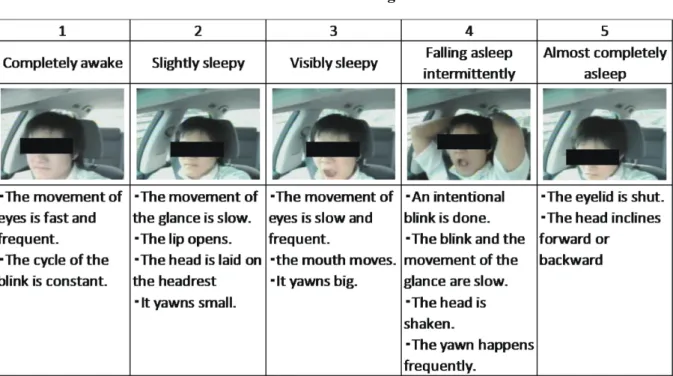
7 2.3 先行車追従走行場面の分析 先行車が存在する場面において,ドライバは先行車の速度変化に応じて自車の速度を調 節し,先行車と安全な車間距離を保って追従走行している.この「速度の調節の仕方」と 「安全な車間距離」はドライバによって異なり,先行車追従走行をモデル化する上では, それぞれのドライバごとに運転行動を分析する必要がある. なお本研究で定義する先行車追従走行場面は以下に示す条件とする. ‐走行速度が高速道路における最低速度60 km/h を超えている ‐車間時間(車間距離を自車速度で除した値)が5 秒以内である ‐追従走行が2 分以上継続している ドライブレコーダにより収集した運転データのうち,車間距離,速度の関係について分 析し,さらにドライバの顔画像からドライバの運転状態の評価を行う.ドライバの顔映像 からドライバの運転行動を把握する研究は数多く存在し,本研究ではドライバの顔画像か らドライバの眠気を客観的に判定するのに有効とされている NEDO 評定を用いる[12]. NEDO 評定は表 2.3 に示す基準でドライバの眠気を 5 段階に判定するものである.本研究 ではこの NEDO 評定を用いて,追従開始から 10 秒間のドライバの顔映像をもとに 5 段階 に判定した.ドライバの顔映像を客観的に判断し,眠気を定量化することで,提案する注 意力低下状態の検出手法の比較データとして用いた.
8 2.4 規範運転操作モデル
実路走行実験によって得られた走行データに基づき,ドライバの追従運転行動である車 間距離と速度のモデル化を行う.まず,ドライバと車両の関係を制御系で模擬すると,図 2.4.1 のようなフィードバック系で表わすことができる[13].
Fig. 2.4.1. Driver-Vehicle system
図の様に,ドライバが車両を運転する際には,周囲環境の情報を認知し,現在の車両の 状況を考慮した上で車両を操作する系になっている.本研究ではこのドライバ-車両系を制 御対象として,ドライバの通常運転を模擬する規範操作モデル,規範モデルと実際の車両 挙動との差異からドライバ状態を推定するアルゴリズム,ドライバ状態に基づき運転を支 援する運転支援システムを付加したシステムを提案する.提案するシステムを図2.4.2 に示 す.
Fig. 2.4.2 Proposed driver assistance system
提案するシステムに含まれている規範運転操作モデルは,ドライバの現在の運転を評価
Driver
Environment
Operation
Vehicle
Motion
-+
+
-Reference Driver-Vehicle Model
Reference
motion
Driver State
Estimation
Deviation
Reference operation
Assistance HMI System
Driver
Environment
Operation
Vehicle
Motion
-+
9
する基準として,ドライバの通常運転を再現するモデルである必要がある.そこで本研究 では,先行車追従場面を図2.4.3 に示すように,先行車に対して自車をばね・マス・ダンパ 系と仮定する[14].
Fig. 2.4.3 Pictorial diagram of car-following state
比較的簡易的なモデルであるが,隊列(プラトゥーン)自動運転のアルゴリズムとして も用いられ,モデルに存在するパラメータを調整することで,ドライバごとに適合した運 転行動の再現が可能であると考えられる.図2.4.2 のモデルにおける自車の運動方程式を式 (2.4.1)に示す.
(
)
{
p m}
(
p m)
mk
x
x
R
c
x
x
x
m
=
−
−
*+
−
(2.4.1) ただし,R*はドライバがとるいつもの車間距離である.ここで m p mx
x
R
=
−
,a
m=
x
m (2.4.2) とすると,式(2.4.1)は式(2.4.2)を用いて,{
m}
m mk
R
R
c
R
ma
=
−
*+
(2.4.3) ただし,amは自車の加速度のモデル値,Rmは先行車と自車との車間距離のモデル値である. さらに,m,c,k をペダル操作ゲインとして,m
k
H
R=
,m
c
H
V=
(2.4.4) とすると,式(2.4.3)は式(2.4.4)を用いて,c
x
m
x
p
k
Usual headway distance
R
*
R
m
10
{
m}
V m R mH
R
R
H
R
a
=
−
*+
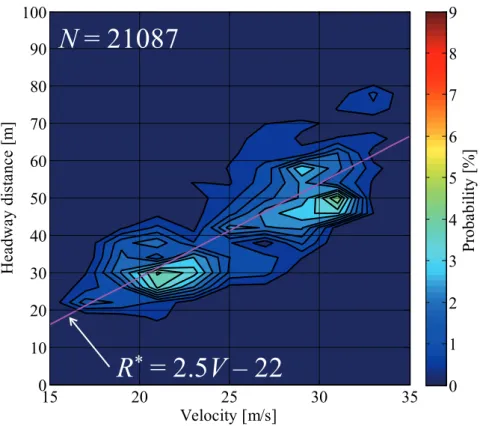
(2.4.5) ただし,HR,HV はドライバの特性により異なるパラメータである.HR はドライバが現在 の車間距離をどの程度すばやく目標とする車間距離にするかを表すフィードバックゲイン であり,HVは自車と先行車との相対速度をどの程度すばやく0 にするかをあらわすフィー ドバックゲインである. 式(2.4.5)に含まれているドライバのいつもの車間距離 R*,車間距離に対するフィードバ ックゲイン HR,速度に関するフォードバックゲイン HVの 3 つのドライバパラメータは, ドライブレコーダにより取得した実際の走行データを用いて同定する.用いる走行データ はそれぞれのドライバにおいて, NEDO 評定の結果で 1(完全に起きている)と判定され た走行データのうち,ランダムに抽出した約10 分間の追従走行データのみを用いる. 2.4.1 通常時の車間距離 先行車追従走行時の車間距離と自車速度の関係を分析した ドライバA における,速度域ごとの車間距離の分布および,横軸が自車速度,縦軸が車 間距離である等高線を図 2.4.1.1 に示し,ドライバ B におけるそれを図 2.4.2.2 に示す.図 中のマゼンタ色の実線は車間距離を自車速度に関する一次関数と仮定し,最小二乗法によ り算出した回帰直線である[15].直線の式は図中に示している.図をみると,両ドライバと もに車間距離と自車速度は比例関係にあるが,それぞれの傾きは異なっている.さらにド ライバB よりもドライバ A の方が車間距離にばらつきがあり,これは車間距離を一定に保 つことにさほど重点を置いていない運転をしていると考えられる.本研究で構築する規範 運転操作モデルのパラメータの一つである目標車間距離R*は図に示した式で定義すること とする.11
Fig. 2.4.1.1 Probability of headway distance (Driver A)
Fig. 2.4.1.2 Probability of headway distance (Driver B) Velocity [m/s] H ead w ay d is ta nc e [ m ] 15 20 25 30 35 0 10 20 30 40 50 60 70 80 90 100 Pr ob ab ility [% ] 0 1 2 3 4 5 6 7 8 9
R
*
= 2.5V – 22
N = 21087
Velocity [m/s] H ead w ay d is tan ce [ m ] 15 20 25 30 35 0 10 20 30 40 50 60 70 80 90 100 Pr ob ab ility [% ] 0 1 2 3 4 5 6 7 8 9R
*
= 1.4V – 1.8
N = 21201
12 2.4.2 ペダル操作ゲイン 式(2.4.5)の制御則におけるペダル操作ゲイン HR,HVを適切に決定することで,時々刻々 変化する先行車の挙動に対するドライバの通常時の操作量だけでなく,速度や車間距離も 推定できる.これにより,ブレーキタイミングの遅れや先行車との接近度合いを検出でき ると考えられる.本研究では,規範モデルの車間距離と現在の車間距離を比較することで 非通常運転を検出するため,通常時の車間距離データを適切に推定することが重要である. そこで,現在の車間距離の実路データとモデルから推定した値の誤差の二乗積分がもっと も小さくなるときのHRとHVを用いる.計算式を式(2.4.6)に示す.
( )
( )
(
)
∫
−
=
T m RT
R
t
R
t
dt
e
1
0 2 (2.4.6) ただし,R は車間距離の実路走行データである.式(2.4.6)を用いて通常運転時の HRと HV をドライバごとに同定し,これをドライバ個人のパラメータとして非通常運転検出をおこ なう.規範運転操作モデルに用いるHRとHVは,2.4.1 節で目標車間距離を算出したデータ と同じデータを用い,データ 1 トリップごとに同定した HRとHVの平均値とする.得られ たペダル操作ゲインを表2.4.2 に示す.Table 2.4.2 Driver parameters Driver Feedback gains
HV HR
A 0.1825 0.0135 B 0.23667 0.036
13 2.5 規範モデルの妥当性 通常運転時における規範運転操作モデルの出力と実際の測定データを比較したところ, 規範操作モデルと実際の速度データはよく合っており,パラメータの調整が妥当であると ともに,先行車の速度入力のみからドライバの通常運転を再現するモデルであるといえる ことが明らかとなった(詳細は紙面の都合上割愛).しかし注意力低下時においては規範操 作モデルと実際の速度データは一部で一致しておらず,規範運転操作モデルよりも実際の 車間距離が増える傾向にあった.これは,注意力が低下することで先行車の挙動に対する ドライバの追従パフォーマンスが低下し,自然と車間距離が開いていってしまっているた めであると考えられた.これらの結果から,この注意力低下時に車間距離が広がる傾向を 定量的に評価し,追従パフォーマンスを示すと考えられる規範運転操作モデルのフィード バックゲインの分析結果と,規範運転操作モデルと実際の車間距離の誤差分布を用いた注 意力低下判定について以下に述べる. 2.6 注意力低下運転の診断 個別適合型運転支援システムのコンセプトでは,ドライバの通常運転モデルと現在の運 転行動データを比較することで非通常運転状態を検出するため,モデルからの逸脱状態を 定量的に評価する必要がある.そこで本節では注意力低下時における車間距離のモデル誤 差を定量的に評価し,追従パフォーマンスを示すと考えられる規範運転操作モデルのフィ ードバックゲインの分析結果と,規範運転操作モデルと実際の車間距離の誤差分布を用い た注意力低下診断について述べる. 2.6.1 モデル誤差の分布 自車速度および車間距離における規範運転操作モデルと実際の測定データの差を分布に することで定量的に評価する.式(2.6.1)に速度誤差,式(2.6.2)に車間距離誤差の評価に用い る計算式を示す.
( )
( )
( )
( )
t
V
t
V
t
V
t
m m V−
=
ε
(2.6.1)( )
( )
( )
( )
t
R
t
R
t
R
t
m m R−
=
ε
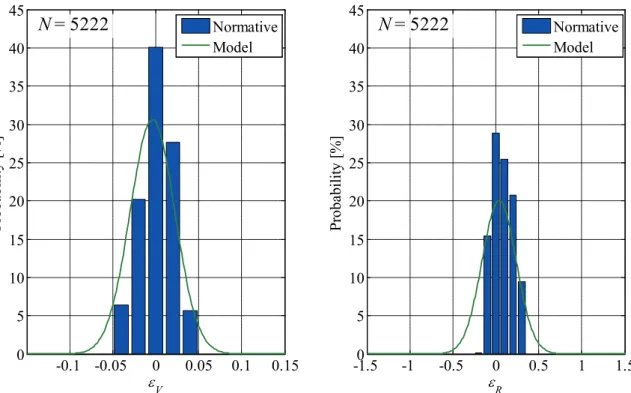
(2.6.2) ただし,V は自車速度の実路走行データ,R は車間距離の実路走行データ,添字 m は規範14 追従運転モデルから出力した値を示す.この指標を用いて分布を作成し,通常運転時,注 意力低下時それぞれの分布について考察する. 2.6.2 通常運転時 まず通常運転時における自車速度および車間距離の分布を図 2.6.2.1~図 2.6.2.4 に示す. 図2.6.2.1,図 2.6.2.2 はドライバ A の 2 例,図 2.6.2.3,図 2.6.2.4 がドライバ B の 2 例であ る. 図2.6.2.1~図 2.6.2.4 の棒グラフは通常運転時における規範運転操作モデルからの誤差分 布であり,実線は規範運転操作モデルの構築に用いたデータのモデル誤差の分布を正規分 布で近似したものである.縦軸は頻度[%]をあらわしており,図中の N はデータ点数であ る.左側が速度に関するモデル誤差εV,右側が車間距離に関するモデル誤差εR であり,横 軸における 0 は規範運転操作モデルとの誤差がないことを表している.これは通常運転時 でもモデル誤差がこの程度発生し,さらにその誤差は個人によって差があるということを 示している.図2.6.2.1,図 2.6.2.2 のドライバ A における規範運転操作モデルの分布(緑色 実線)と図2.6.2.3,図 2.6.2.4 のドライバ B における規範運転操作モデルの分布(緑色実線) を比較すると,ドライバA よりもドライバ B のほうが普段から自車速度や車間距離がモデ ルに近い運転行動であることが分かる.このように規範運転操作モデルとの誤差分布の形 状はドライバによって異なり,注意力低下状態検出をそのドライバの誤差分布を基準にす ることに意義があるといえる.
15
Fig. 2.6.2.1 Comparison of velocity and headway deviation of vehicle behavior between the reference model and the normative driving (Driver A, Trip No. 5)
Fig. 2.6.2.2 Comparison of velocity and headway deviation of vehicle behavior between the reference model and the normative driving (Driver A, Trip No.29)
-0.1 -0.05 0 0.05 0.1 0.15 0 5 10 15 20 25 30 35 40 45 εV Pr ob ab ility [% ] Normative Model -1.50 -1 -0.5 0 0.5 1 1.5 5 10 15 20 25 30 35 40 45 εR Pr ob ab ility [% ] Normative Model
N = 5222
N = 5222
-0.1 -0.05 0 0.05 0.1 0.15 0 5 10 15 20 25 30 35 40 45 εV Pr ob ab ility [% ] Normative Model -1.50 -1 -0.5 0 0.5 1 1.5 5 10 15 20 25 30 35 40 45 εR Pr ob ab ility [% ] Normative ModelN = 4158
N = 4158
16
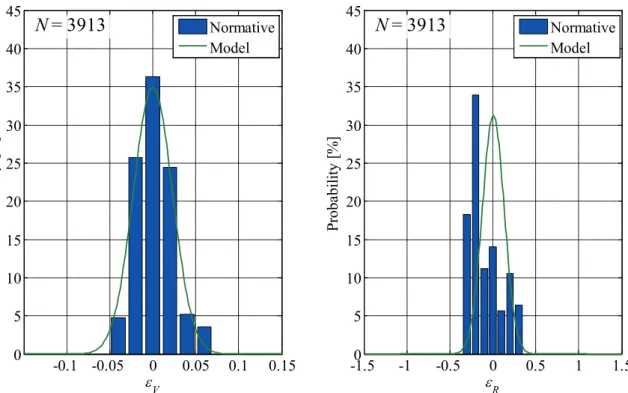
Fig. 2.6.2.3 Comparison of velocity and headway deviation of vehicle behavior between the reference model and the normative driving (Driver B, Trip No. 5)
Fig. 2.6.2.4 Comparison of velocity and headway deviation of vehicle behavior between the reference model and the normative driving (Driver B, Trip No. 17)
-0.1 -0.05 0 0.05 0.1 0.15 0 5 10 15 20 25 30 35 40 45 εV Pr ob ab ility [% ] Normative Model -1.50 -1 -0.5 0 0.5 1 1.5 5 10 15 20 25 30 35 40 45 εR Pr ob ab ility [% ] Normative Model
N = 3913
N = 3913
-0.1 -0.05 0 0.05 0.1 0.15 0 5 10 15 20 25 30 35 40 45 εV Pr ob ab ility [% ] Normative Model -1.50 -1 -0.5 0 0.5 1 1.5 5 10 15 20 25 30 35 40 45 εR Pr ob ab ility [% ] Normative ModelN = 6605
N = 6605
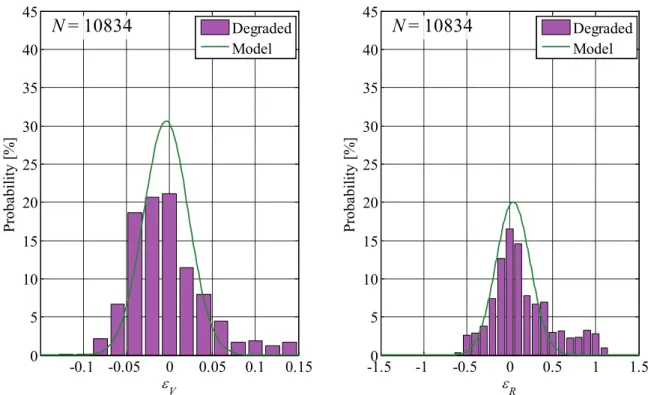
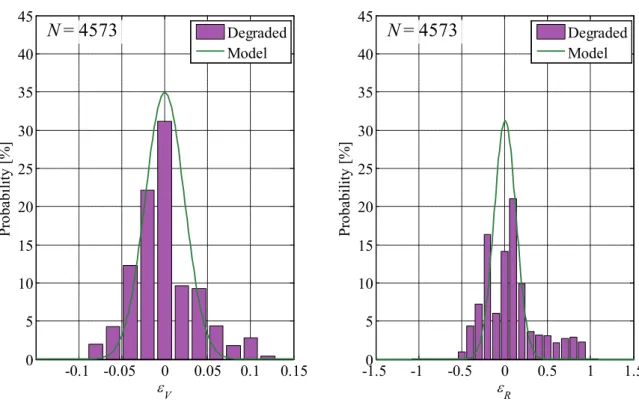
17 2.6.3 注意力低下時 次に注意力低下時における自車速度および車間距離の分布を図2.6.3.1~図 2.6.3.4 に示す. 図2.6.3.1,図 2.6.3.2 はドライバ A の 2 例,図 2.6.3.3,図 2.6.3.4 がドライバ B の 2 例であ る. 図2.6.3.1~図 2.6.3.4 の棒グラフは注意力低下時における規範運転操作モデルからの誤差 分布であり,実線は規範運転操作モデルの構築に用いたデータのモデル誤差の分布を正規 分布で近似したものである.縦軸は頻度[%]をあらわしており,図中の N はデータ点数で ある.左側が速度に関するモデル誤差εV,右側が車間距離に関するモデル誤差εRである. ドライバA,ドライバ B ともに自車速度および車間距離の誤差は通常運転よりも大きく, さらに車間距離の誤差は通常運転時よりも規範モデルとの誤差が正側にシフトする場合が あることがわかる.これは先行車の動きに対して通常運転時よりも注意していない,すな わち追従パフォーマンスが低下していると考えられる.このように,規範運転操作モデル と実際の車間距離の誤差の分布を定量的に評価することで,ドライバ注意力低下状態を推 定可能であると考えられる.
18
Fig. 2.6.3.1 Comparison of velocity and headway deviation of vehicle behavior between the reference model and the degraded driving (Driver A, Trip No. 34)
Fig. 2.6.3.2 Comparison of velocity and headway deviation of vehicle behavior between the reference model and the degraded driving (Driver A, Trip No. 41)
-0.1 -0.05 0 0.05 0.1 0.15 0 5 10 15 20 25 30 35 40 45 εV Pr ob ab ility [% ] Degraded Model -1.50 -1 -0.5 0 0.5 1 1.5 5 10 15 20 25 30 35 40 45 εR Pr ob ab ility [% ] Degraded Model
N = 10834
N = 10834
-0.1 -0.05 0 0.05 0.1 0.15 0 5 10 15 20 25 30 35 40 45 εV Pr ob ab ility [% ] Degraded Model -1.50 -1 -0.5 0 0.5 1 1.5 5 10 15 20 25 30 35 40 45 εR Pr ob ab ility [% ] Degraded ModelN = 4245
N = 4245
19
Fig. 2.6.3.3 Comparison of velocity and headway deviation of vehicle behavior between the reference model and the degraded driving (Driver B, Trip No. 23)
Fig. 2.6.3.4 Comparison of velocity and headway deviation of vehicle behavior between the reference model and the degraded driving (Driver B, Trip No. 24)
-0.1 -0.05 0 0.05 0.1 0.15 0 5 10 15 20 25 30 35 40 45 εV Pr ob ab ility [% ] Degraded Model -1.50 -1 -0.5 0 0.5 1 1.5 5 10 15 20 25 30 35 40 45 εR Pr ob ab ility [% ] Degraded Model
N = 4573
N = 4573
-0.1 -0.05 0 0.05 0.1 0.15 0 5 10 15 20 25 30 35 40 45 εV Pr ob ab ility [% ] Degraded Model -1.50 -1 -0.5 0 0.5 1 1.5 5 10 15 20 25 30 35 40 45 εR Pr ob ab ility [% ] Degraded ModelN = 4387
N = 4387
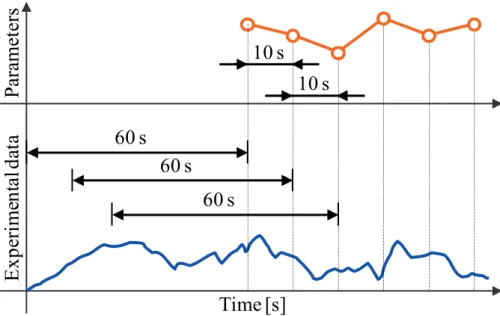
20 2.6.4 ペダル操作ゲインの時間変化 前節では,モデル誤差の分布からドライバの注意力低下状態を定量的に検出する手法を 述べた.本節では,モデル誤差の分布から評価した注意力低下状態の裏付けとして,規範 モデルにおけるペダル操作ゲインの時間変化を調査し,追従パフォーマンスの低下の定量 化について考察する. 時々刻々変化するフィードバックゲインの同定は,現在から過去60 秒間の運転データを 用い,それを 10 秒ごとに再計算する手法を用いて同定する.これは,本研究室が DS で行 った研究に用いた値を改良し,設定した.
Fig. 2.6.4.1 Data processing in parameters identification
Pa
ra
m
et
er
s
60 s
Exp
er
im
en
ta
l d
at
a
10 s
60 s
60 s
10 s
Time [s]
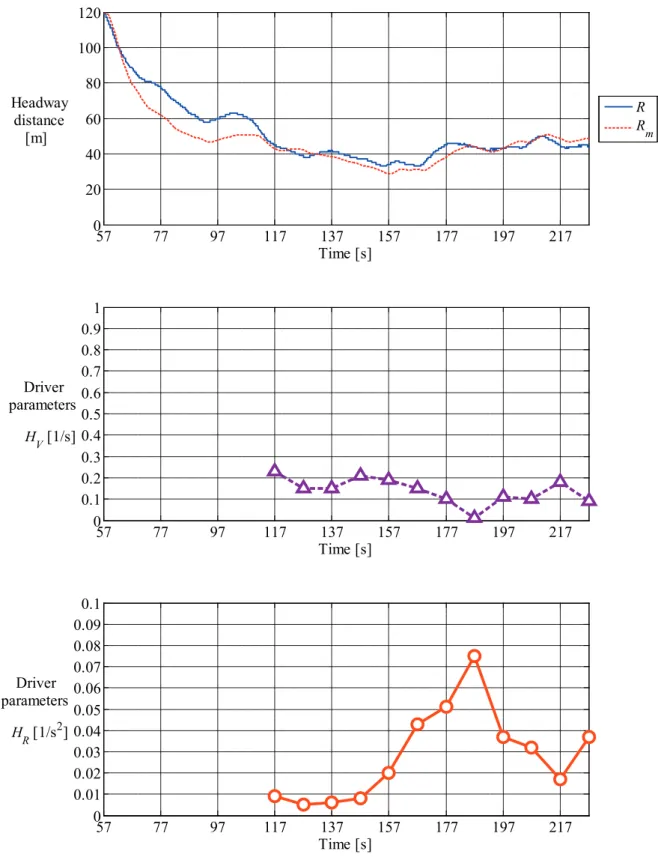
21 2.6.5 通常運転時 まず通常運転時におけるドライバフィードバックゲイン HV およびドライバフィードバ ックゲインHRの分布を図2.6.5.1~図 2.6.5.4 に示す.図 2.6.5.1,図 2.6.5.2 はドライバ A の 2 例,図 2.6.5.3,図 2.6.5.4 がドライバ B の 2 例である. ドライバA において,HVは図2.6.5.1 の例で 0.01~0.23 1/s,図 2.6.5.2 の例では 0.10~0.57 1/s となり,HRは図2.6.5.1 の例で 0.005~0.075 1/s2,図 2.6.5.2 の例では 0.005~0.021 1/s2 となっている.また,ドライバB において,HVは図2.6.5.3 の例で 0.11~0.25 1/s,図 2.6.5.4 の例では0.05~0.41 1/s となり,HRは図 2.6.5.3 の例で 0.003~0.008 1/s2,図2.6.5.4 の例で は0.001~0.041 1/s2となっている.これは,通常運転時のドライバの追従パフォーマンス の時間変化を示している.
22
Fig. 2.6.5.1 Temporal change of parameters at the normative driving (Driver A, Trip No. 5)
57 77 97 117 137 157 177 197 217 0 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 57 77 97 117 137 157 177 197 217 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s] Driver parameters HV [1/s] 57 77 97 117 137 157 177 197 217 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 Time [s] Driver parameters HR [1/s2]
23
Fig. 2.6.5.2 Temporal change of parameters at the normative driving (Driver A, Trip No. 29)
11590 1179 1199 1219 1239 1259 1279 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 11590 1179 1199 1219 1239 1259 1279 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s] Driver parameters HV [1/s] 11590 1179 1199 1219 1239 1259 1279 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 Time [s] Driver parameters HR [1/s2]
24
Fig. 2.6.5.3 Temporal change of parameters at the normative driving (Driver B, Trip No. 5)
16480 1668 1688 1708 1728 1748 1768 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 16480 1668 1688 1708 1728 1748 1768 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s] Driver parameters HV [1/s] 16480 1668 1688 1708 1728 1748 1768 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 Time [s] Driver parameters HR [1/s2]
25
Fig. 2.6.5.4 Temporal change of parameters at the normative driving (Driver B, Trip No. 17)
119 139 159 179 199 219 239 259 279 299 319 339 0 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 119 139 159 179 199 219 239 259 279 299 319 339 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s] Driver parameters HV [1/s] 119 139 159 179 199 219 239 259 279 299 319 339 0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 Time [s] Driver parameters HR [1/s2]
26 2.6.6 注意力低下時 次に注意力低下時におけるドライバフィードバックゲイン HV およびドライバフィード バックゲイン HRの分布を図2.6.6.1~図 2.6.6.4 に示す.図 2.6.6.1,図 2.6.6.2 はドライバ A の2 例,図 2.6.6.3,図 2.6.6.4 がドライバ B の 2 例である.ドライバフィードバックゲイン HVが1 1/s の時およびドライバフィードバックゲイン HRが0.1 1/s2の時は,規範運転操作 モデルの車間距離が実際の車間距離と大きく異なるために,パラメータの同定が不可能で あった結果である. ドライバA において,HVは図2.6.6.1 の例で 0.01~0.49 1/s,図 2.6.6.2 の例では 0.20~0.40 1/s となり,HRは図 2.6.6.1 の例で 0.001~0.046 1/s2,図 2.6.6.2 の例では 0.001~0.006 1/s2 となっている.また,ドライバB において,HVは図2.6.6.3 の例で 0.03~0.85 1/s,図 2.6.6.4 の例では0.01~0.36 1/s となり,HRは図2.6.6.3 の例で 0.001~0.017 1/s2,図2.6.6.4 の例で は0.005~0.018 1/s2となっている. これを見ると,まずHVにおいては値が大きく変わる,あるいは値が小さいままになって しまい,これは,相対速度に対するフィードバックが突然強く起こったり,緩やかになっ たりを繰り返しているといえ,さらにもともと減衰係数を表すことを考えると,相対速度 に対する減衰が不安定であるともいうことができる. 次に HR においては,パラメータ同定が不可能だったものを除くと,ドライバ A は通常 運転時よりも低い値となり,ドライバB は通常運転時と変わらないあるいは多少低いとい う結果になっている.これは,ドライバA は注意力が低下すると自らの目標車間距離に現 在の車間距離を調節する能力が低下し,車間距離にばらつきが現れると考えられるが,ド ライバB の場合は注意力が低下しても自分の目標車間距離に近い車間距離で走行すること ができるといえる. すなわち,それぞれのフィードバックゲインの値が低い場合には,規範運転操作モデル における車間距離と相対速度のフィードバック系が十分に働いていないことを意味する. この場合,割り込み車両などの自車前方の急な状況変化に対して,減速開始タイミングな どが遅れる可能性があると考えられ,フィードバックゲインを見ることで,非常に危険な 状況に陥る前兆をとらえることができると考えられる.
27
Fig. 2.6.6.1 Temporal change of parameters at the degraded driving (Driver A, Trip No. 34)
11460 1196 1246 1296 1346 1396 1446 1496 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 11460 1196 1246 1296 1346 1396 1446 1496 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s] Driver parameters HV [1/s] 11460 1196 1246 1296 1346 1396 1446 1496 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 Time [s] Driver parameters HR [1/s2]
28
Fig. 2.6.6.2 Temporal change of parameters at the degraded driving (Driver A, Trip No. 41)
24490 2469 2489 2509 2529 2549 2569 2589 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 24490 2469 2489 2509 2529 2549 2569 2589 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s] Driver parameters HV [1/s] 24490 2469 2489 2509 2529 2549 2569 2589 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 Time [s] Driver parameters HR [1/s2]
29
Fig. 2.6.6.3 Temporal change of parameters at the degraded driving (Driver B, Trip No. 23)
12440 1264 1284 1304 1324 1344 1364 1384 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 12440 1264 1284 1304 1324 1344 1364 1384 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s] Driver parameters HV [1/s] 12440 1264 1284 1304 1324 1344 1364 1384 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 Time [s] Driver parameters HR [1/s2]
30
Fig. 2.6.6.4 Temporal change of parameters at the degraded driving (Driver B, Trip No. 24)
19660 1986 2006 2026 2046 2066 2086 2106 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 19660 1986 2006 2026 2046 2066 2086 2106 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Time [s] Driver parameters HV [1/s] 19660 1986 2006 2026 2046 2066 2086 2106 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1 Time [s] Driver parameters HR [1/s2]
31 2.7 車間距離誤差に基づく運転診断 本節では規範運転操作モデルと実際の車間距離の誤差の分布を定量的に評価する手法と, 評価結果について述べる. 注意力低下状態の評価には,規範運転操作モデルと実際の車間距離の誤差を無次元化し た値εRを用いる.過去 60 秒間のデータを用いてεRの分布を作成し,10 秒置きにそれを再 計算することで,誤差分布の時間変化を分析する.作成した分布は図 2.7 のように色の違 いによって表現し,時系列に並べることで可視化する.また,規範運転操作モデルの車間 距離と実際の車間距離の誤差分布のずれを定量的に評価し,現在のドライバの注意力を推 定するため,規範運転操作モデルのモデル誤差を正規分布で近似したものと現在の車間距 離の規範モデルからの誤差分布を比較する.具体的には,近似した正規分布の平均mと分散 σをもとに,式(2.7.1),式(2.7.2)に示すように数値化し,式(2.7.3)のように 2 つの平均をと ったものを推定注意力とする.
1
1+
−
=
m m currentP
σ
m
m
(2.7.1) m currentP
σ
σ
=
2 (2.7.2)(
)
2
2 1P
P
P
=
+
(2.7.3) ただし,P1は分布の平均値の横偏差に対する推定注意力,P2は分布の分散に対する推定 注意力,mcurrentは現在の車間距離のモデル誤差分布の平均,mmは規範運転操作モデルのモ デル誤差分布の平均,σcurrentは現在の車間距離のモデル誤差分布の分散,σmは規範運転操 作モデルのモデル誤差分布の分散であり,P は最終的な推定注意力を示し,注意力が高い 順から1~5 の値で数値化したものである.32
Fig. 2.7 Data processing in distribution of headway distance for attentiveness estimation
2.7.1 通常運転時の診断結果 まず通常運転時における,車間距離の規範運転操作モデルからの誤差分布を時系列に並 べて色によって可視化したものと,推定したドライバの注意力,NEDO 評定結果を図 2.7.1.1 ~図 2.7.1.4 に示す.図 2.7.1.1,図 2.7.1.2 はドライバ A の 2 例,図 2.7.1.3,図 2.7.1.4 がド ライバB の 2 例である.図は上から 1. 実際の車間距離(青実線)と規範運転操作モデルの車間距離(赤破線), 2. 実際の車間距離と規範運転操作モデルの車間距離との誤差分布の時系列, 3. 推定したドライバの注意力, 4. ドライバの顔映像より判定した眠気度合, 5. ドライバのフィードバックゲインの時間変化 を表す. これらの図から,通常運転時には,実際の車間距離と規範運転操作モデルの車間距離の 誤差分布は,規範運転操作モデルのモデル誤差とほぼ等しいことから,分布の平均や分散 を用いた推定注意力でも,NEDO 評定と同様の「完全に起きている」状態と判断されたこ とが分かる. 1 1.5 2 2.5 3 3.5 4 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 0 2 4 6 8 Time
33
Fig. 2.7.1.1 Temporal change of distribution at the normative driving (Driver A, Trip No. 5)
57 77 97 117 137 157 177 197 217 0 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 57 77 97 117 137 157 177 197 217 -1.5 -1 -0.5 0 0.5 1 1.5 Time [s] Deviation εR [-] Pr ob ab ility [% ] 0 10 20 30 40 50 57 77 97 117 137 157 177 197 217 Time [s] Estimated 57 77 97 117 137 157 177 197 217 Time [s] Ground truth G ra de [-] 1 2 3 4 5 57 77 97 117 137 157 177 197 217 0 20 40 60 80 100 Time [s] Driver parameters [-] HV(x10-1) HR(x10-2)
34
Fig. 2.7.1.2 Temporal change of distribution at the normative driving (Driver A, Trip No. 29)
11590 1179 1199 1219 1239 1259 1279 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 1159 1179 1199 1219 1239 1259 1279 -1.5 -1 -0.5 0 0.5 1 1.5 Time [s] Deviation εR [-] Pr ob ab ility [% ] 0 10 20 30 40 50 1159 1179 1199 1219 1239 1259 1279 Time [s] Estimated 1159 1179 1199 1219 1239 1259 1279 Time [s] Ground truth G ra de [-] 1 2 3 4 5 11590 1179 1199 1219 1239 1259 1279 20 40 60 80 100 Time [s] Driver parameters [-] HV(x10-1) HR(x10-2)
35
Fig. 2.7.1.3 Temporal change of distribution at the normative driving (Driver B, Trip No. 5)
16480 1668 1688 1708 1728 1748 1768 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 1648 1668 1688 1708 1728 1748 1768 -1.5 -1 -0.5 0 0.5 1 1.5 Time [s] Deviation εR [-] Pr ob ab ility [% ] 0 10 20 30 40 50 1648 1668 1688 1708 1728 1748 1768 Time [s] Estimated 1648 1668 1688 1708 1728 1748 1768 Time [s] Ground truth G ra de [-] 1 2 3 4 5 16480 1668 1688 1708 1728 1748 1768 20 40 60 80 100 Time [s] Driver parameters [-] HV(x10-1) HR(x10-2)
36
Fig. 2.7.1.4 Temporal change of distribution at the normative driving (Driver B, Trip No. 17)
119 139 159 179 199 219 239 259 279 299 319 339 0 20 40 60 80 100 120 Time [s] Headway distance [m] R Rm 119 139 159 179 199 219 239 259 279 299 319 339 -1.5 -1 -0.5 0 0.5 1 1.5 Time [s] Deviation εR [-] Pr ob ab ility [% ] 0 10 20 30 40 50 119 139 159 179 199 219 239 259 279 299 319 339 Time [s] Estimated 119 139 159 179 199 219 239 259 279 299 319 339 Time [s] Ground truth G ra de [-] 1 2 3 4 5 119 139 159 179 199 219 239 259 279 299 319 339 0 20 40 60 80 100 Time [s] Driver parameters [-] HV(x10-1) HR(x10-2)
37 2.8 結言 先行車追従走行場面における自車を先行車に対するばね・マス・ダンパ系として仮定し, 弾性係数と減衰係数をドライバの追従運転行動における運転パフォーマンスとして表現す ることで,先行車の速度を用いてドライバの通常運転を再現する規範運転操作モデルを構 築した. また構築した規範運転操作モデルと実際の走行データの比較から,ドライバの注 意力低下状態の検出手法について検討した.規範運転操作モデルと実際の走行データを比 較し,その誤差を分布で表したところ,注意力低下時には車間距離の誤差が大きくなり, さらに誤差にもばらつきがあることがわかった. この知見をもとに,規範運転操作モデルとの誤差の分布を評価することで,注意力低下 状態を検出できる可能性を示し,更にその分布の時間変化を見ることで,注意力低下状態 をリアルタイムに検出できる可能性を示した.これは個別適合型運転支援システムのコン セプトである,通常運転との比較により現在の異常運転状態を検出するという点を実現し ているといえる.
38
第3章
常時記録型ドライブレコーダを用いた公道実験
[16]―個人の運転スタイル抽出のための基礎的検討―
3.1 実験車両および計測機器 実験車としては日産自動車株式会社製のCube (UA-BNZ11)を用いた.またタクシーの車 両は日産自動車株式会社製のCedric であった.これらの車両には常時記録型ドライブレコ ーダ,車間距離計測用レーザーレーダ,GPS ユニットが取り付けられており,速度,車間 距離等の車両情報を記録する. 走行データ記録には,矢崎計器株式会社と本学が共同開発 した常時記録型ドライブレコーダを用いた.ドライブレコーダの構成図を図 3.1 に示す. このドライブレコーダは車両の信号から車速,ブレーキペダル ON/OFF,本体に内蔵され たセンサから三軸方向加速度,Z 軸方向角速度,GPS からの位置情報,レーザーレーダか らの車間距離を計測する.加速度,角速度の軸方向は,取り付け方向により軸方向は変更 可能である.計測された連続データはコンパクトフラッシュカードへと記録される.39 3.2. 実験コース及び被験者 走行データを収集するためにフィールド実験を行った.実験コースは図 3.2 に示す農工 大工学部周辺,1 周約 12km,30 分のコースを設定した(図 3.2).実験後にはアンケート に答えてもらい急いでいたかなどの確認を行った.被験者は表3.2 に示す 22~33 歳の男性 14 名であり,4 名はペーパードライバ,残り 10 名は日常的に運転しているドライバであ る.各被験者は実験コースを 120~240km 走行し,コースを走行し終えた後,急いでいた か,ヒヤリハットの有無等についてアンケートを行った. また,都内のタクシー会社の協力を得,タクシードライバの運転データを取得した.2 台のタクシー車両を用いて,4 名の被験者に対し,およそ 8 ヶ月間データ収集を行った.
40
Table3.2 Subjects
Subject Age Driving Driving Driving
frequency experience distance [time/month] [year] [km/year]
N1 23 10 5 7000 N2 23 0 2 0 N3 33 5 14 8000 N4 22 0 3 0 N5 23 4 4 1000 N6 23 1 5 100 N7 23 4 4 500 N8 25 2,3/year 3 100 N9 23 1 5 100 N10 23 1 4 300 N11 22 4 5 1500 N12 23 8 4 10000 N13 24 4 5 2000 N14 23 1 4 300 T1 60 30 42 28000 T2 39 30 21 24000 T3 59 14 41 27500 T4 65 12 48 25000
41 3.3 熟練度に対する考察 図 3.3.1~3.3.3 に,被験者 N8,N11,T1 の結果を示す.N8 はペーパードライバ,N11 は一般 ドライバ,T1 はタクシードライバである.横軸はブレーキ開始時加速度,縦軸は車間距離 である. それぞれの被験者を比較すると,タクシードライバは他の被験者に比べ車間距離の平均 と分散が小さいことが分かる.また,ペーパードライバと一般ドライバを比較すると,一 般ドライバの分布はピークを 2 個持っている.ペーパードライバは運転に慣れていないた め,安全のマージンを大きくとり,単独走行する機会が増えると考えられる.また,慎重 に運転しているため,加速度も小さい.一方,一般ドライバは運転に慣れており,ペーパ ードライバよりも追従走行する場面が多くなると考えられる. 図3.3.2 中の追従状態と単独走行の加速度を比較すると,追従時の場合のほうが加速度が 小さい.これは,追従状態おいて個人の車間距離を保つため減速度の小さなブレーキ操作 を行っているためと考えられる.また,タクシードライバのように運転操作に熟練すると, 一定の車間距離の中で追突の回避,前方車との車間距離の調整を行うと考えられるので, ブレーキのタイミングが1 つになると考えられる.
42
Fig.3.3.1 Experimental result (subject: N8)
Fig.3.3.2 Experimental result (subject: N11)
0 0.1 0.2 0.3 0.4 0.5 0 10 20 30 40 50 0 10 20 30 40 50 0 20 40 H ead w ay d is tan ce [ m ] Frequency [-] 0 0.1 0.2 0.3 0.4 0.5 0 50 100 Acceleration [G] Fre que nc y [-] 0 0.1 0.2 0.3 0.4 0.5 0 10 20 30 40 50 0 10 20 30 40 50 0 20 40 H ead w ay d is tan ce [ s] Frequency [-] 0 0.1 0.2 0.3 0.4 0.5 0 50 100 Acceleration [G] Fre que nc y [-]
43
Fig.3.3.3 Experimental result (subject: T1)
これらから,運転の習熟度が上がると,単独走行する機会が減り,追従走行する場面が 増えると考えられる.追従走行は単独走行の場合よりも車間距離が短いので,追従走行が 増えると運転中の平均車間時間は短くなる.結果として,運転の習熟度は車間距離の平均 値に現れると言える. また,車間時間に関しては,運転に慣れているドライバでは常に一定の車間時間でブレ ーキを使用するようになり,習熟度が上がるほど車間時間の平均値,分散共に小さくなる 傾向があることが分かった. 図 3.3.4 は横軸が運転頻度,縦軸が車間時間の平均値である.四角がタクシードライバ, 丸が一般ドライバ,三角がペーパードライバの結果である. 図より,ペーパードライバ は平均車間時間が約4 秒,一般は約 3 秒,タクシードライバは約 2 秒に集中している.ま た,走行頻度が多いほど,車間時間の平均は小さくなっており,それぞれのグループ内で は一般ドライバが最もばらついていることが分かる. 0 0.1 0.2 0.3 0.4 0.5 0 10 20 30 40 50 0 10 20 30 40 50 0 500 1000 H ead w ay d is tan ce [ s] Frequency [-] 0 0.1 0.2 0.3 0.4 0.5 0 500 1000 Acceleration [G] Fre que nc y [-]
44
Fig.3.3.4 Relationship of Variance time Headway and driving frequency
0
5
10
15
20
25
1
1.5
2
2.5
3
3.5
4
4.5
Driving frequency [time/month]
A
ve
ra
ge
of t
im
e he
adw
ay [s
]
taxi
normal
paper
45 3.4 個人特性に対する考察
個人の違いを調べるには,運転状態ごとの運転特性を調査する必要があるため,混合正 規分布を用い,運転状態のクラスタリングを行い,運転状態を分類し調査を行った.
Fig.3.4 Relationship of Average time headway and Acceleration
図 3.4 は,横軸が運転頻度,縦軸が車間距離の分散を示した図である.上段はタクシー ドライバと,3.3 節で説明した一般ドライバの追従走行時,下段はペーパードライバと一般 ドライバの単独走行時の結果である.タクシードライバは車間距離が小さいことから全て 追従走行とし,ペーパードライバは車間距離が大きいことから全て追従走行としている. 追従状態・単独状態共に,熟練度に依らず個人ごとに異なる値となっている.よって,車 間時間の分散はドライバ属性には関連せず,それぞれ異なる値を取っていることから,ド ライバの個人特性を表しているといえる. 0.13 0.14 0.15 0.16 0.17 0.18 0.19 0 0.5 1 1.5 2 2.5 A ve ra ge of t im e he adw ay] Acceleration [G] Normal driver Taxi driver 0.13 0.135 0.14 0.145 0.15 0.155 0.16 0.165 0.17 0.175 0.18 0 2 4 6 8 A ver ag e o f t im e h ead w ay Acceleration [G] Sunday driver Normal driver
46 3.5 結言 個人の運転特性を抽出するため,その基礎的検討として運転経験と平均車間時間,車間 距離の関連を調査したところ,ブレーキ開始時車間時間の平均値と運転の習熟度に関連が あり,習熟度が上がるほど車間時間の平均値は小さくなること,またブレーキ開始時車間 距離の分散,ブレーキ使用中最大加速度は個人によって異なり,習熟度には影響されず, ドライバの個人の運転スタイルは車間距離の分散に現れることがわかった.
―階層ベイズ法による急ぎ運転状態の推定
[17]―
個別適合型運転支援システムの開発において,常時記録型 DR により計測した加減速行 動時の運転行動の調査を行ってきた.その結果,加速度と車間時間の度数分布が急ぎ運転 に関連があること,急ぎ運転時の加減速行動はいつもの運転行動と比べ加速度が大きくな り車間時間が短くなることが確認された.この手法では,いつもの運転を計測しデータベ ースを作成することで,データベースの分布から外れた状態を急ぎ運転として検出するこ とが可能である.しかし,個人による違いや運転経験による違いが,どの特徴量に関連し ているかは不明であること,設定された閾値により2 値的に運転状態が判断されることが 問題点と考えられる. そこで本研究では,階層ベイズ法を用いて急ぎ運転状態の推定を行った.階層ベイズ法 は,従来の統計モデルでは扱いの難しかった個体差・非定常性などの要因をモデル化する ことができる統計的手法であり[18,19],運転行動のような個人差,経験差などによってモデ ルパラメータがばらつくような個別の要因を扱う複雑なモデルにも適用可能である.よっ て,階層ベイズ法によるモデル化を行うことで,急ぎ運転がどのような特徴量に関連して いるかについても調査した. 3.6 実験コース及び被験者 ドライバには普段の運転よりも急いだ運転を行ってもらうため,被験者には 22~33 歳 の男性3 名,日常的に自動車の運転しているドライバを選択した(表 3.6 参照).なお実験 コースは図 3.2 に示したコースと同様である.実験は,ドライバのいつも通りの運転を 16 トリップ,急ぐように指示をした際の運転を 4 トリップ設定したコースで計測を行う.計47
測したデータは,ドライバのいつもの運転と急ぎ運転を学習するための学習データ,提案 手法の評価を行うテストデータに分けて使用する.
Table3.6 Subjects characteristics Information
3.7 急ぎ運転状態推定手法 ここで,イベントデータベクトルx が N 個与えられたとする.このとき,対応する運転 状態をt=(t1,…,tN)で表すと,重みパラメータ w に関する尤度関数が次の式で与えられる.
∏
= − = N n n n t N p 1 1 Tx , ) w | ( ) w | t ( β (3.7.1) 次に, w の事前分布をガウス分布と仮定し,個々の重みパラメータ ωiが異なったハイ パーパラメータαiを持つとする.このような分布は,関連度自動決定(Automatic Relevance Determination: ARD)事前分布と呼ばれている.このときの特徴量の次元を M とすると,ハ イパーパラメータα は α=(α1,…, αM)となり,w の事後確率は次式で表すことができる. ) , 0 | ( ) | w ( 1 1 − =∏
= M i i i N p α w α (3.7.2) ここで,αiは対応する重みパラメータωiの精度である.ハイパーパラメータα に対して 超事前分布 p(α)を導入すると,超事前分布はガウス分布の共役事前分布であるガンマ分布 となる. ) , | ( ) ( Gam aN bN qα = α (3.7.3) ガンマ分布のパラメータをanとbnとする.このとき,このモデルの同時分布と周辺尤度 Drive Frequency [time/month] Driving experience [Year] Driving distance [Km/year] Subject Age A 33 6 14 8000 B 23 8 4 10000 C 22 4 4 100048 は次式で表すことができる. ) ( ) | w)p(w | t ( ) t , w, ( α p α p α p = (3.7.4)
∫ ∫
= p α d dα p(t|w) (w, ,t) w (3.7.5) 上式はw と α について解析的に解くことはできないため,周辺対数尤度は近似法を用い て求める.周辺対数尤度の最適解を求めることで,最適なモデルパラメータw を求める事 ができる.これらより,求めた重みw によっていつもの運転と急ぎ運転との違いを含む特 徴量が選択され,ハイパーパラメータ α によって個人差,運転経験差などが表現されると 考えられる. 識別は,一般的に各状態はたがいに重ならず 1 つの状態に割り当てられるとする.この とき状態Ckに対する事後確率はペイズの定理より以下のように定義できる. ) ( ) exp( ) exp( ) ( ) | ( ) ( ) | ( ) | ( k j j k j j j k k k a a a C p C x p C p C x p x C p σ = = =∑
∑
(3.7.6) )) ( ) | ( ln( k k k p x C p C a = (3.7.7) この式は正規化指数関数として知られており,ロジスティクシグモイド関数の一般化と 見なすことができる.このとき最も簡単なモデルは,入力変数に対して線形であり,各状 態の線形モデルは次式で表すことができる. 0 w w + = x a T k k (3.7.8) これらより,状態Ckに対する事後確率を求める事が出来る.つまり,提案する手法では, 2 値的な状態検出ではなく,各状態における確率として検出することが可能である. 本研究で提案する手法においても,過去の手法と同様,1 回の加速行動又は減速行動を 1 イベントと定義して各特徴量を計測する.特徴量は表 3.7 に示す 20 種類を用い,学習デ ータから階層ベイズ法を用いて各特徴量の重みパラメータ w を決定する.なお,表中の x は車両の左右方向,y は前後方向,z は垂直方向を表す.49
Table3.7 Feature of driving behavior Maximum acc. (x,y,z)
Mean acc. (x,y,z) Maximum angler vel. (θz)
Mean angler vel. (θz) Time of maximum acc. (x,y,z) Headway distance of operation start
Headway distance of operation end Minimum headway distance Time headway of operation start
Time headway of operation end Minimum time headway
Operation start vel. Operation end vel.
Operation time 3.8 急ぎ運転状態の推定 テストデータを用いて急ぎ運転状態の推定を行った.運転状態の決定方法として,各状 態の確率が高いほうを現在の状態であるとして推定し,その精度として全テストデータの うち正しく推定出来た確率によって評価を行った. 被験者 A の加速時と減速時の急ぎ運転推定結果を図 3.8.1-3.8.4 に示す.図中は上から操 作開始時速度が0-20 km/h,20-40 km/h,40-60 km/h の結果であり,線種は青の実線がいつ もの運転の確率,緑の実線が急ぎ運転の確率,赤い破線が実際に急ぎ運転を指示した実験 である.
50
Fig.3.8.1 Training result of acceleration (subject A)
Fig.3.8.2 Training result of deceleration (subject A)
50 100 150 200 250 300 350 400 450 500 0
100
Number of acceleraion event
Pr
ob
ab
ility
[%
] Training (normal) Training (hurry) True Label (hurry)
50 100 150 200 250 300 350 400 450
0 100
Number of acceleraion event
Pr ob ab lility [% ] 20 40 60 80 100 120 0 100
Number of acceleraion event
Pr ob ab lility [% ] Vel.0-20 [km/h] Vel.20-40 [km/h] Vel.40-60 [km/h] 50 100 150 200 250 300 0 100
Number of deceleration event
Pr
ob
ab
ility
[%
] Training (normal) Training (hurry) True label (hurry)
50 100 150 200 250 300 350 400 450 500 0
100
Number of deceleration event
Pr ob ab ility [% ] 50 100 150 200 250 0 100
Number of deceleration event
Pr ob ab ility [% ] Vel.0-20 [km/h] Vel.20-40 [km/h] Vel.40-60 [km/h]
51
Fig.3.8.3 Estimation result of acceleration (subject A)
Fig.3.8.4 Estimation result of deceleration (subject A)
図3.8.1 および 3.8.2 の学習結果より,減速時の 0-20km/h 以外では,適切に学習が行えて いることが分かる.また図3.8.3 および 3.8.4 の推定結果より,減速時の 0-20km/h 以外にお いて約 80%以上の精度で運転状態を推定出来ていることがわかる.しかし 20km/h 以下の速 度域では 60%以下と精度が悪くなった.被験者 B についても被験者 A と同様に減速時 0-20km/h の精度が悪く,それ以外の速度域では約 75%以上の精度で推定出来た.図 3.8.5, 3.8.6 に示すように被験者 C も減速時 0-20km/h の精度は 40%以下と悪く,加速時 40-60km/h 10 20 30 40 50 60 70 80 0 100 Pr ob ab ility [%
] Estimation (normal) Estimation (hurry) True label (hurry)
5 10 15 20 25 30 35 40 45 50 55 0 100 Pr ob ab ility [% ] 2 4 6 8 10 12 14 16 18 0 100
Number of acceleraion event
Pr ob ab ility [% ] Vel.0-20 [km/h] Vel.20-40 [km/h] Vel.40-60 [km/h] 5 10 15 20 25 30 35 40 45 50 55 0 100 Pr ob ab ility [%
] Estimation (normal) Estimation (hurry) True label (hurry)
10 20 30 40 50 60 70 80 0 100 Pr ob ab ility [% ] 5 10 15 20 25 30 35 40 45 50 0 100
Number of acceleraiton event
Pr ob ab ility [% ] Vel.0-20 [km/h] Vel.20-40 [km/h] Vel.40-60 [km/h]