ランニングにおける下腿と後足部間の協調性パターン
8
0
0
全文
(2) 下. と後足部間の協調性パターン. 333. 膝関節障害を発生しやすいことが明らかになっている。 このように,下. と後足部でどちらがより大きく動くの. か,つまりセグメントの動きの優位性を知ることは障害 発生メカニズムを理解するうえで重要であると考えられ る。しかし,後足部回内 / 下 内旋比の方法においても, 相互相関関数の問題である時系列(同じタイミング)で の 2 つのセグメントの運動の関係性は明らかにできない。 これらの問題を解決できる手法のひとつに,modified vector coding technique( 以 下,MVCT) が あ る. 12). 。. この手法は,時系列で 2 つの関節角度の比率を算出する ことができる。さらに,近年 Needham ら. 13). はこの手. 法を応用して 2 つのセグメントの運動学的な関係性と優 位性を 4 つの‘協調性パターン’に分類する方法を提唱 している。この手法を用いることで,ランニングにおけ る同一時系列での下. と後足部間の運動学的な関係性と. 優位性を解明することができる。 よって,本研究は Needham ら. 13). が提唱した協調性. 図 1 前方および外側からの右下 貼付位置. と足部の反射マーカー. パターンの分類を用いて,健常成人を対象にランニング 中の下. と後足部間の協調性パターンを分類することを. 目的とした。. ランニングを慣れたことを確認してから計測を実施し た。課題動作は各被験者につき 10 ストライド計測され た。動作計測には赤外線カメラ 13 台を含む 3 次元動作. 方 法. 解析装置(Vicon MX: Oxford Metrics Inc)を使用し,. 1.対象者. サンプリング周波数は 100 Hz とした。. 対象者は下肢に整形外科的疾患や神経学的疾患の既往 がなく,かつ扁平足を評価できる too many toe sign. 14)15). 3.データ解析. が陽性でない健常成人男性 10 名とした(年齢 22.6 ± 3.1. 課題動作中に計測された反射マーカー位置に対し,遮. 歳,身長 171.7 ± 5.0 cm,64.8 ± 8.0 kg) 。対象者には事. 断周波数 6 Hz の 2 次 Zero-lag Butterworth low-pass filter. 前に口頭および書面にて十分な説明を行い,同意を得た. を施した。本研究において,セグメントは下. うえで実施した。なお,本研究は所属機関である新潟医. を定義した. 療福祉大学の倫理審査委員会の承認(17786-170210)を. するため,下. 得たうえで実施した。. する後足部の内転 / 外転角度をカルダン角 Xyz sequence. と後足部. 16)20). (表 1) 。下 と後足部の相対角度を算出. に対する後足部の回内 / 回外,下. に対. (X;底屈 / 背屈,Y;回内 / 回外,Z;外転 / 内転)にて 2.実験手順. 算出した. 21‒23). ‒3)24). 。本研究では先行研究 1. に準じて後. 外旋,後足部外転を下. 内旋として定義. 対象者に対し直径 9.5 mm の体表マーカーを右下. と. 足部内転を下. 足部に貼付した。反射マーカーの貼付部位は妥当性. 16). した。この方法は立脚期において適用でき,正確に下. 16). の軸回旋を表現できることが報告されている. と再現性. 17)18). が確認されている Leardini foot model. に準じ,脛骨粗面,腓骨頭,内果,外果,踵骨(アキレ. 24). 。解析区. 間は立脚期とし,100% 時間正規化を行った。. ス腱付着部),載距突起,腓骨筋腱滑車,舟状骨,立方骨, 第 1 中足骨底,第 2 中足骨底,第 1 中足骨頭,第 2 中足. 4.下. 骨頭,第 5 中足骨頭,母趾とした(図 1)。. 下. 先行研究. 19). は,77.3%(1,065 人中の 823 人)の対象. と後足部間の協調性の定量化 と後足部間の協調性の定量化には MVCT. 用いた。近位セグメントである下. 12). を. を横軸,遠位セグメ. 者が裸足ランニング中に後足部で接地することを報告し. ントである後足部を縦軸にとる angle-angle diagram を. ている。よって,本研究の課題動作はトレッドミル(ミ. 作成し,時系列でプロットされた値の成す角度(coupling. ナト医科学,Auto Runner AR-100)上での後足部接地. angle;図 2)を算出した(式 1) 。. ランニングとした。なお,ランニング速度はジョギング 1) 程度の速度に設定した(2.5 m/s) 。限りなく定常のラ. ンニング動作に近似させるため,トレッドミル上にて 1 分以上設定された速度で練習し,対象者がトレッドミル. ………………………………(1) .
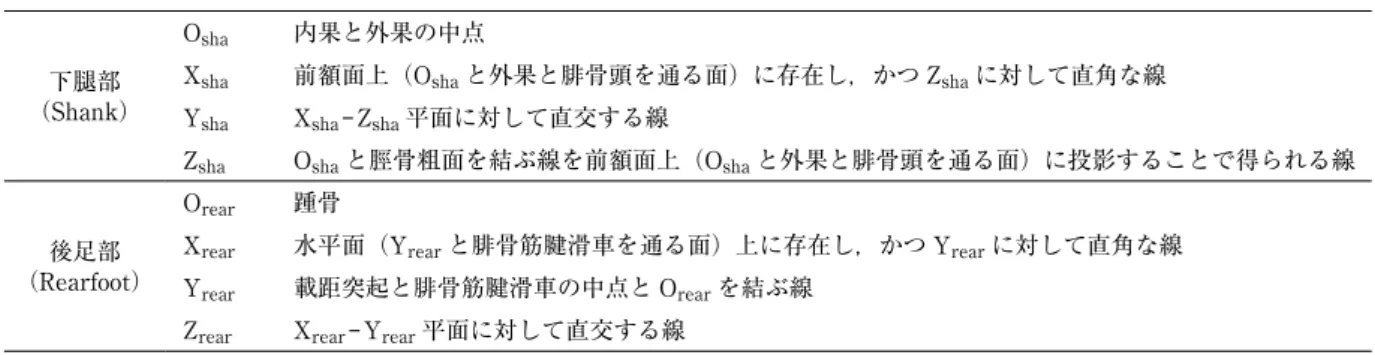
(3) 334. 理学療法学 第 44 巻第 5 号. 表 1 セグメントの座標系の定義. 下 部 (Shank). 後足部 (Rearfoot). Osha. 内果と外果の中点. Xsha. 前額面上(Osha と外果と腓骨頭を通る面)に存在し,かつ Zsha に対して直角な線. Ysha. Xsha ‒ Zsha 平面に対して直交する線. Zsha. Osha と脛骨粗面を結ぶ線を前額面上(Osha と外果と腓骨頭を通る面)に投影することで得られる線. Orear. 踵骨. Xrear. 水平面(Yrear と腓骨筋腱滑車を通る面)上に存在し,かつ Yrear に対して直角な線. Yrear. 載距突起と腓骨筋腱滑車の中点と Orear を結ぶ線. Zrear. Xrear ‒ Yrear 平面に対して直交する線. * X 軸−左右方向(右方向が+),Y 軸−前後方向(前方向が+),Z 軸−上下方向(上方向が+). 図 2 代表的な 1 被験者の 1 試行における下 と後足部の angle-time plot と angle-angle diagram Angle-angle diagram では近位セグメントの下 を横軸(プラスが外旋,マイナスが内旋),遠位セグメン トの後足部を縦軸(プラスが回外,マイナスが回内)とした.プロットされた値の成す角度より,時系列で coupling angle を算出した.Coupling angle は 0 ∼ 360°の範囲に存在し,99 コマ分のデータが算出される.. γ j,i は coupling angle を示し,0°≤ γ ≤ 360°の範囲で 算出される。x j,i と yj,i はそれぞれ下. と後足部角度を. 表しており,i はストライド j 歩目の % 立脚期を示す。 Circular statistics を用いて. 25). ,coupling angle は被験. 値から次の 4 つの協調性パターンに分類する; 1)In-phase with proximal dominancy (下 +下. 内旋と後足部回内あるいは外旋と回外の連鎖 の動きが大きい). 者内,被験者間で平均処理された(補遺)。. 2)In-phase with distal dominancy. 次に,ベクトル長を求め(式 2) ,ばらつきの指標で. (下. ある coupling angle variability(CAV i)を算出した(式 26). 3) 。. 内旋と後足部回内あるいは外旋と回外の連鎖. +後足部の動きが大きい) 3)Anti-phase with proximal dominancy (下 +下. ……………………………………(2). . …………………………(3). の動きが大きい). 4)Anti-phase with distal dominancy (下. . 外旋と後足部回内あるいは内旋と回外の連鎖. 外旋と後足部回内あるいは内旋と回外の連鎖. +後足部の動きが大きい) 運動連鎖では下. 5.協調性パターンの分類 Needham ら. 27). の 報 告 に 基 づ き,coupling angle の. 内旋と後足部回内がペア,下. と後足部回外がペアになることが報告されている そのため,下. 外旋 5)28). 。. 内旋と後足部回内あるいは外旋と回外が.
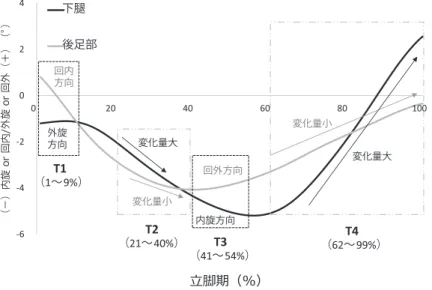
(4) 下. と後足部間の協調性パターン. 335. 図 3 下 と後足部間の協調性パターンの分類 Coupling angle の値を,図に示す 4 つの協調性パターンに時系列で分類した. この協調性パターンは 45°刻みで分類されている.たとえば,60°の coupling angle は in-phase with distal dominancy に分類され, 「下 外旋と後足部回外 が起こり,かつ後足部が下 外旋と比較してより回外する」という協調性パ ターンとなる.なお,下線は動きが優位なセグメントを表している. D;Distal segment,P;Proximal segment.. 生じた場合は in-phase とし,下. 外旋と後足部回内あ. 地し,その後は回内方向へと運動していた(図 4;T1) 。. るいは内旋と回外が生じた場合は anti-phase と定義し. 立脚期 41% 以降は回外方向への運動を示していた。立. た。さらに,in-phase もしくは anti-phase のなかでどち. 脚期約 21 ∼ 40%(図 4;T2)および 62 ∼ 99%(図 4;. らのセグメントがより大きく動いているかを示すため. T4)のフェーズでは,下. に,下. なり,下. が後足部に対して大きく動いた場合は proxi-. mal dominancy(近位セグメントが優位) ,後足部が下 に対して大きく動いた場合は distal dominancy(遠位. と後足部角度の変化量が異. が後足部よりも急峻に動いていた。また,図. 4 の T3 のフェーズで下. は内旋方向へ運動しているが,. 後足部は回外方向へ運動していた。. セ グ メ ン ト が 優 位 ) と 定 義 し た。 た と え ば,60 °の. 吸収期の下. と後足部間の協調性パターンにおいて,. coupling angle は in-phase with distal dominancy に 分. 踵接地時の下. と後足部間の協調性パターンは anti-. 類され,「下. phase with distal dominancy(下. が下. 外旋と後足部回外が起こり,かつ後足部. 外旋と比較してより回外する」という協調性パ. 外旋と後足部回内+. 後足部回内の動きが大きい)を示していた。その後は. ターンの解釈となる(図 3)。. coupling angle は 減 少 し, 協 調 性 パ タ ー ン は in-phase. ランニングには吸収期(立脚期前半)と推進期(立脚. with distal dominancy(下. 期後半)の 2 つのファンクショナルフェーズが存在す. 回内の動きが大きい) ,in-phase with proximal domi-. る. 29). 。吸収期は後足部回内ピーク値で推進期に切り替わ 5). nancy(下. 内旋と後足部回内+後足部. 内旋と後足部回内+下. 内旋の動きが大き. るため ,後足部回内ピーク値タイミング(立脚期 42%). い)に変化した(図 5)。協調性パターンの割合は in-. で 2 つのフェーズに分けた。被験者間で平均処理された. phase with proximal dominancy がもっとも大きな割合. coupling angle を吸収期と推進期で各協調性パターンに. を占めていた(図 6;48.8%)。. 分類した。本研究のすべての解析は Scilab-5.5.2(Scilab. 推進期の下. Enterprise)を用いてプログラミング処理を行った。. phase with proximal dominancy(下 外+下. 結 果 踵接地時,下. と後足部間の協調性パターンは anti内旋と後足部回. 内旋の動きが大きい)から開始し,その後. coupling angle はさらに減少した。立脚期 60% 以降の は内旋位を示していた。踵接地後,下. は立脚期 9% まで外旋方向へ運動し(図 4;T1) ,そ. 協 調 性 パ タ ー ン は in-phase with proximal dominancy (下. 外旋と後足部回外+下. 外旋の動きが大きい)を. の後は内旋方向へと運動していた。立脚期 60% 以降は. 示していた(図 5) 。協調性パターンの割合は in-phase. 外旋方向への運動を示していた。後足部は回外位で踵接. with proximal dominancy がもっとも大きな割合を占め.
(5) 336. 理学療法学 第 44 巻第 5 号. 図 4 全被験者における下 と後足部角度の加算平均波形 Time1(T1;1 ∼ 9%)と Time3(T3;41 ∼ 54%)はそれぞれ下 外旋と後足部回内がペア, 下 内旋と後足部回外がペアになっているフェーズを示している(つまり本研究では anti-phase に分類される).Time2(T2;21 ∼ 40%)と Time4(T4;62 ∼ 99%)は下 と後足部で角度変化量が異なり,下 が後足部に対して優位に動いているフェーズを 示している(つまり本研究では proximal dominancy に分類される) .. 図 5 下 と後足部間の coupling angle と CAV 吸収期と推進期は後足部回内ピーク値タイミング(42%)を基準に分けられた. D;Distal segment,P;Proximal segment.. ていた(図 6;65.5%) 。ばらつきの指標である coupling. ある。. angle variability(CAV)は立脚期を通して低値を示し,. 本研究は先行研究. 一定の値で立脚期を推移していた(図 5) 。. して後足部接地ランニングを実施した。本研究で算出さ れた下. 考 察. 1). を参考にランニング速度を規定. 内旋 / 外旋と後足部回内 / 回外角度(図 4)は. 先行研究の結果. 1)3). を支持している。そのため,本研. 本研究で明らかになった主たる知見は 2 つある。1 つ. 究における立脚期の下. めは,図 4 の T1 および T3 のフェーズにおいて,下. coupling angle は,間接的に妥当性が高いことが考えら. と後足部間の協調性パターンは anti-phase を示してい. れる。. たことである(図 5) 。2 つめは,in-phase with proximal. 1 つめの知見に関して,T1 では下. dominancy の割合が吸収期と推進期でもっとも多くの. 部回内方向,T3 では下. 割合を占めていたことである(図 6)。本研究はこれま. 運動が生じているため,T1 と T3 のフェーズでは anti-. で解明されていなかったランニング中の下. phase に分類された。この結果は,これまで報告されて. と後足部間. の協調性パターンを明らかにした新規性の高い知見で. きた下. と後足部角度を基に算出された. 外旋方向と後足. 内旋方向と後足部回外方向へ. 内旋と後足部回内,下. 外旋と後足部回外は運.
(6) 下. と後足部間の協調性パターン. 337. 図 6 吸収期と推進期における下 と後足部間の協調性パターンの割合 D;Distal segment,P;Proximal segment.. ‒3). 動連鎖関係にあるという先行研究結果 1. と異なった. 的知見になり得ると考えられる。. 見解を示した。しかし,先行研究が用いている相互相関. 本研究結果は,ランニング障害患者や扁平足などの足. 関数は,波形の類似性を立脚期全体で運動連鎖として評. 部変形患者と比較できるデータになり得ると考えている。. 価するため,時系列で 2 つのセグメントの動きの関係性. たとえば,代表的なランニング障害のひとつである大. を評価することができない。実際に,Pohl ら たランニング中の下. が示し. と後足部角度(歩幅通常条件)は. 膝蓋関節痛は,ランニング中に生じる下. の過剰な内旋. が障害発生要因のひとつとして考えられている. 9)34). 。そ. 内旋と後足部. のため,大 膝蓋関節痛患者に対し MVCT を適用させ,. 外旋と後足部回外に強い運動連鎖が生じたこ. coupling angle を基に協調性パターンに分類した場合,. 本研究と同様であるにもかかわらず,下 回内,下. 3). とを報告している。本研究より,吸収期前半(1 ∼ 9%). 本研究結果(図 6;吸収期)と比較して in-phase with. では下. 外旋と後足部回外,推進期前半(41 ∼ 54%). proximal dominancy(下. では下. 内旋と後足部回外が生じ,必ずしも下. 内旋と. の動きが大きい)の協調性パターンの割合が増加する可. 外旋と後足部回外の運動連鎖は生. 能性が考えられる。協調性パターンの変化は障害発生要. 後足部回内および下. 内旋と後足部回内+下. 因に関与することが報告されているため. じないことが明らかになった。 2 つめの知見に関して,図 4 の T2 より,下. 内旋は. 内旋. 32). ,下 と後足. 部間の協調性パターンの変化も障害発生要因に関与する. 後足部回内と比較して角度変化が急峻であり,角度変化. かもしれない。. 量が大きくなっていた。同様に,図 4 の T4 においても. 本研究には 3 つの限界がある。1 つめは,課題動作を. 下. 後足部接地ランニングとしたことである。裸足ランニン. 外旋は後足部回外と比較して角度変化量が大きく. 19). ,. なっていた。Coupling angle はこの角度変化量の大きさ. グでは後足部接地が多いことが報告されているが. を表し,この値より協調性パターンに分類するため,吸. 中足部接地や前足部接地が多いことも報告されてい. 収 期 お よ び 推 進 期 に お い て in-phase with proximal. る. dominancy の割合が多くなったと考えられる。障害発. いにより後足部と下. 生メカニズムを考えるうえで,2 つのセグメントの動き. いるため,中足部接地と前足部接地のランニングでは本. の優位性を理解することは重要であり,後足部回内 / 下. 研究結果と異なる可能性がある。2 つめは,裸足でラン. 内旋比が低いと膝関節障害のリスクが高まることが報. ニング動作を実施したことである。本研究は足部にマー. 告されている. 5)10)11). の後足部回内 / 下. 。しかし,Rodrigues ら. 30). は従来. 内旋比の方法は時系列で比率を算出. できないため,障害発生の検出に有用でないことを報告 している。これまで,体幹と骨盤間 ント間. 12)33). 31)32). ,足部セグメ. で協調性パターンを分類した先行研究は報. 告されているが,下. と後足部間で分類した研究は報告. されていない。本研究は相互相関関数や後足部回内 / 下 内旋比では評価できない,時系列での下. と後足部に. おける運動の関係性と優位性を明らかにした新たな基礎. 35)36). 。さらに,先行研究 2)は足部接地パターンの違 の角度は変化することを報告して. カーを貼付するために裸足でランニングを実施したが, Eslami ら. 37). は裸足とサンダル着用下では下. と後足部. の angle-angle diagram が異なることを報告している。 3 つめは,後足部外内転を下 と下. 内外旋と定義し,後足部. の 2 つのセグメントの運動として捉えたことであ. る。多くの先行研究. 1‒3)24)37). でこの方法は用いられて. おり,実際に本研究結果(図 4)は先行研究 した結果となった。しかし,下. 角度は大. 1). と類似. に対する下. の運動を算出することが一般的である。また,この方.
(7) 338. 理学療法学 第 44 巻第 5 号. 法は遊脚期の下 り. 回旋角度に適用することが困難であ. 1). ,さらに地面に後足部が固定されていない足尖離地. 時などの下. 回旋角度は妥当性が低い可能性がある。解. 決策として,スキンモーションエラーを最小限にできる ポイントクラスター法. 38). を適用することで,すべての. 立脚期でより精度の高い下. 回旋角度が算出できるかも. しれない。今後,足部接地パターンや履物の影響,下 回旋角度の算出方法,さらにはランニング障害患者や扁 平足などの足部変形患者における協調性パターンについ ても検証していく必要がある。 結 論 本研究は,健常成人を対象にランニング中の下. と後. 足部間の協調性パターンを分類した。本研究より,ラン ニングの立脚期において下. 外旋と後足部回内および下. 内旋と後足部回外の協調性パターンもあることが明ら かになった。さらに,下. 内旋と後足部回内,下. と後足部回外の運動連鎖のなかで,下. 外旋. がより動く割合. が多くを占めることが明らかになった。本研究結果は, ランニング中に生じる下. と後足部間の運動学的な関係. 性と優位性を理解するうえで基礎的な知見になり得る。 謝辞:本研究の一部は科学研究費(研究活動スタート支 援:16H07304)により実施された。 文 献 1)Pohl MB, Messenger N, et al.: Forefoot, rearfoot and shank coupling: effect of variations in speed and mode of gait. Gait Posture. 2007; 25(2): 295‒302. 2)Pohl MB, Buckley JG: Changes in foot and shank coupling due to alterations in foot strike pattern during running. Clin Biomech. 2008; 23(3): 334‒341. 3)Pohl MB, Messenger N, et al.: Changes in foot and lower limb coupling due to systematic variations in step width. Clin Biomech. 2006; 21(2): 175‒183. 4)Rodgers MM: Dynamic biomechanics of the normal foot and ankle during walking and running. Phys Ther. 1988; 68(12): 1822‒1830. 5)DeLeo AT, Dierks TA, et al.: Lower extremity joint coupling during running: a current update. Clin Biomech. 2004; 19(10): 983‒991. 6)高林知也,江玉睦明,他:走行と歩行の動作様式の違いが 後足部と中足部間の運動連鎖に与える影響.日本基礎理学 療法学雑誌.2015; 18(2): 19‒26. 7)Dubbeldam R, Nester C, et al.: Kinematic coupling relationships exist between non-adjacent segments of the foot and ankle of healthy subjects. Gait Posture. 2013; 37(2): 159‒164. 8)Takabayashi T, Edama M, et al.: Changes in kinematic coupling among the rearfoot, midfoot, and forefoot segments between running and walking. J Am Podiatr Med Assoc. 2016 (In-press). 9)Tiberio D: The effect of excessive subtalar joint pronation on patellofemoral mechanics: a theoretical model. J Orthop Sports Phys Ther. 1987; 9(4): 160‒165. 10)Nawoczenski DA, Saltzman CL, et al.: The effect of foot. structure on the three-dimensional kinematic coupling behavior of the leg and rear foot. Phys Ther. 1998; 78(4): 404‒416. 11)McClay I, Manal K: Coupling parameters in runners with normal and excessive pronation. J Appl Biomech. 1997; 13: 109‒124. 12)Chang R, Van Emmerik R, et al.: Quantifying rearfootforefoot coordination in human walking. J Biomech. 2008; 41(14): 3101‒3105. 13)Needham RA, Naemi R, et al.: A new coordination pattern classification to assess gait kinematics when utilising a modified vector coding technique. J Biomech. 2015; 48(12): 3506‒3511. 14)Johnson KA, Strom DE: Tibialis posterior tendon dysfunction. Clin Orthop Relat Res. 1989; (239): 196‒206. 15)Geideman WM, Johnson JE: Posterior tibial tendon dysfunction. J Orthop Sports Phys Ther. 2000; 30(2): 68‒77. 16)Leardini A, Benedetti MG, et al.: Rear-foot, mid-foot and fore-foot motion during the stance phase of gait. Gait Posture. 2007; 25(3): 453‒462. 17)Arnold JB, Mackintosh S, et al.: Repeatability of stance phase kinematics from a multi-segment foot model in people aged 50 years and older. Gait Posture. 2013; 38(2): 349‒351. 18)Deschamps K, Staes F, et al.: Repeatability of a 3D multi-segment foot model protocol in presence of foot deformities. Gait Posture. 2012; 36(3): 635‒638. 19)Nunns M, House C, et al.: Biomechanical characteristics of barefoot footstrike modalities. J Biomech. 2013; 46(15): 2603‒2610. 20)Cappozzo A, Catani F, et al.: Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech. 1995; 10(4): 171‒178. 21)Grood ES, Suntay WJ: A joint coordinate system for the clinical description of three-dimensional motions: application to the knee. J Biomech Eng. 1983; 105(2): 136‒ 144. 22)Cole GK, Nigg BM, et al.: Application of the joint coordinate system to three-dimensional joint attitude and movement representation: a standardization proposal. J Biomech Eng. 1993; 115(4a): 344‒349. 23)Chang R, Rodrigues PA, et al.: Multi-segment foot kinematics and ground reaction forces during gait of individuals with plantar fasciitis. J Biomech. 2014; 47(11): 2571‒2577. 24)McClay I, Manal K: A comparison of three-dimensional lower extremity kinematics during running between excessive pronators and normals. Clin Biomech. 1998; 13(3): 195‒203. 25)Batschelet E: Circular statistics in biology. Academic press, London, 1981. 26)Needham R, Naemi R, et al.: Quantifying lumbar-pelvis coordination during gait using a modified vector coding technique. J Biomech. 2014; 47(5): 1020‒1026. 27)Needham R, Naemi R, et al.: Quantification of rear-foot, fore-foot coordination pattern during gait using a new classification. Footwear Science. 2015; 7(sup1): S32‒S33. 28)Khamis S, Yizhar Z: Effect of feet hyperpronation on pelvic alignment in a standing position. Gait Posture. 2007; 25(1): 127‒134. 29)Dugan SA, Bhat KP: Biomechanics and analysis of running gait. Phys Med Rehabil Clin N Am. 2005; 16(3): 603‒621. 30)Rodrigues P, Chang R, et al.: Evaluating the coupling.
(8) 下. と後足部間の協調性パターン. between foot pronation and tibial internal rotation continuously using vector coding. J Appl Biomech. 2015; 31(2): 88‒94. 31)Seay JF, Van Emmerik RE, et al.: Low back pain status affects pelvis-trunk coordination and variability during walking and running. Clin Biomech. 2011; 26(6): 572‒578. 32)Seay JF, Van Emmerik RE, et al.: Influence of low back pain status on pelvis-trunk coordination during walking and running. Spine. 2011; 36(16): 1070‒1079. 33)Takabayashi T, Edama M, et al.: Quantifying coordination among rearfoot, midfoot, and forefoot segments during running. Sports Biomech. 2016 (In-press). 34)Lee TQ, Anzel SH, et al.: The influence of fixed rotational deformities of the femur on the patellofemoral contact pressures in human cadaver knees. Clin Orthop Relat Res. 1994; (302): 69‒74. 35)Lieberman DE, Castillo ER, et al.: Variation in Foot Strike. Patterns among Habitually Barefoot and Shod Runners in Kenya. PLoS One. 2015; 10(7): e0131354. 36)Hamill J, Russell EM, et al.: Impact characteristics in shod and barefoot running. Footwear Science. 2011; 3(1): 33‒40. 37)Eslami M, Begon M, et al.: Forefoot-rearfoot coupling patterns and tibial internal rotation during stance phase of barefoot versus shod running. Clin Biomech. 2007; 22(1): 74‒80. 38)Andriacchi TP, Alexander EJ, et al.: A point cluster method for in vivo motion analysis: applied to a study of knee kinematics. J Biomech Eng. 1998; 120(6): 743‒749.. 補遺 1.Circular statistics による被験者内および被験者間の 平均処理について (http://jspt.japanpt.or.jp/journal/rigaku-apendix/). 〈Abstract〉. Coordination Pattern between Shank and Rearfoot during Running. Tomoya TAKABAYASHI, PT, MSc, Mutsuaki EDAMA, PT, PhD, Masatoshi NAKAMURA, PT, PhD, Emi NAKAMURA, PT, MSc, Chiaki KANAYA, PT, Bachelor, Soh YANAGI, PT, Diploma, Masayoshi KUBO, PT, ScD Niigata University of Health and Welfare, Institute for Human Movement and Medical Sciences Takuma INAI, PT, MSc Oguma Orthopedics Clinic. Purpose: The present study is aimed at demonstrating the coordination between the shank and rearfoot during running. Method: Ten healthy young men walked barefoot on a treadmill. The coupling angle, representing the coordination between the shank and rearfoot, was calculated by using modified vector coding technique and categorized into four coordination patterns. Results: During the first half of the absorption and propulsion phase, coordination between the shank and rearfoot displayed an anti-phase (shank external rotation and rearfoot eversion, shank internal rotation and rearfoot inversion). Throughout the absorption phase, the coordination pattern with the highest proportion was in-phase with proximal dominancy (shank internal rotation and rearfoot eversion with shank dominancy; 48.8%). Similarly, the coordination pattern with the highest proportion was in-phase with proximal dominancy (shank external rotation and rearfoot inversion with shank dominancy; 65.5%) during the entire propulsion phase. Conclusion: This study demonstrated that coordination between shank external rotation and rearfoot eversion, between shank internal rotation and rearfoot inversion exists during the stance phase. Furthermore, it was demonstrated that the proportion of shank dominancy is higher compared to that of the rearfoot during in-phase coordination. Key Words: Coordination pattern, Shank, Rearfoot. 339.
(9)
図
関連したドキュメント
In the further part, using the generalized Dirac matrices we have demonstrated how we can, from the roots of the d’Alembertian operator, generate a class of relativistic
We present sufficient conditions for the existence of solutions to Neu- mann and periodic boundary-value problems for some class of quasilinear ordinary differential equations.. We
For further analysis of the effects of seasonality, three chaotic attractors as well as a Poincar´e section the Poincar´e section is a classical technique for analyzing dynamic
Tanaka , An isoperimetric problem for infinitely connected complete open surfaces, Geometry of Manifolds (K. Shiohama, ed.), Perspec- tives in Math. Shioya , On asymptotic behaviour
We give a new proof of a theorem of Kleiner–Leeb: that any quasi-isometrically embedded Euclidean space in a product of symmetric spaces and Euclidean buildings is contained in a
It leads to simple purely geometric criteria of boundary maximality which bear hyperbolic nature and allow us to identify the Poisson boundary with natural topological boundaries
We formalize and extend this remark in Theorem 7.4 below which shows that the spectral flow of the odd signature operator coupled to a path of flat connections on a manifold
One important application of the the- orem of Floyd and Oertel is the proof of a theorem of Hatcher [15], which says that incompressible surfaces in an orientable and
