THE THESIS OF DOCTOR OF PHILOSOPHY
Study on Multi Spherical
Underwater Robots with
Hybrid-propulsion Devices and Acoustic
Communication Systems
Shuoxin Gu
Graduate School of Engineering
Kagawa University
Abstract I
Ph.D. thesis of Dr. Shuoxin Gu
Abstract
Underwater robots have been promoted a significant interest in monitoring the marine environment. When underwater robots face complex tasks, the individual's high efficiency and flexibility are the basis for accomplishing the task, and the effective cooperation and cooperation between the multiple robots are the advanced task of completing the complex tasks. The propulsion system as the main power for the underwater robot will extremely influence the hydrodynamic performance, efficiency and flexibility of the robot. The wireless communication as a key technology for the underwater robot will also implement the underwater observing, communication, cooperation or collaboration of multiple robots.
To address these issues, the Fourth-generation Spherical Underwater Robot (SUR IV) with hybrid propulsion devices including vectored water-jet and propeller thrusters and acoustic communication systems is proposed in this thesis.The diversity of the movement modes of hybrid propulsion devices are also proposed for the different targets as remote or hover and general or silent. To analyze the hydrodynamic characteristics of the hybrid thruster and SUR IV, the Computational Fluid Dynamics (CFD) simulations are calculated in ANSYS CFX by using the multi-reference frame method. The simulation results show the better hydrodynamic performance of the SUR IV. The thrust experiment
Abstract
to evaluate the performance of the novel hybrid thruster is also conducted to verify the good characteristic of the hybrid propulsion device. Then, in order to evaluate the performance of the SUR IV, multi-DoF motions including the surge, heave and yaw for the SUR IV, were carried out in the swimming pool. The better improvement of the overall robot is assessed by the experimental results.
The communication system is established between base station and multi-SURs by using the acoustic modem with the advantages as multipath noise rejection, compact size, low error rate and power consumption. The communication principles are proposed as the basis of implementation of the instruction set with multi-channel communication. The characteristics of the communication system are evaluated and verified by communication accuracy and cooperation motion experiments.
For widespread use of the spherical underwater robot, developments of the efficiency, motion state, stability, hydrodynamic performance, communication or cooperation are necessary and significant. Thus, this thesisis involved in the above aspects and provides a perception for this kind of research.
Contents III Ph.D. thesis of Dr. Shuoxin Gu
Contents
Abstract ... I Contents ... III Acknowledgements ... V Declaration ... VII Chapter 1 Introduction ... 1 1.1 Thesis Scope ... 1 1.2 Literature Review ... 3 1.3 Thesis Objectives ... 12 1.4 Thesis Overview ... 13Chapter 2 Mechanical design of the hybrid propulsion devices ... 17
Chapter 3 Hydrodynamic analysis of SUR IV ... 19
Chapter 4 Development and design of the SUR IV ... 21
Chapter 5 Performance evaluation and improvement of SUR IV . 23 Chapter 6 Acoustic communication and cooperation between base station and Multi-SURs ... 25
Chapter 7 Concluding Remarks ... 27
7.1 Contributions and achievement ... 27
7.2 Future Discussions ... 30
Publication List ... 33
Acknowledgements V
Ph.D. thesis of Dr. Shuoxin Gu
Acknowledgements
The author would like to present her most sincere and significant gratitude to her supervisor, Professor Shuxiang Guo, for his patient guidance, valuable suggestions, wise insight, and friendly encouragement throughout the research in her doctoral course. He also provides her with first class resources. His conscientious academic spirit and modest, open-minded personality inspire me both in academic study and daily life.
The author also would like to extend her special thanks to her vice-supervisors and thesis committee members, Prof. Hideyuki Hirata, Prof. Keisuke Suzuki and Prof. Shoichi Maeyama. Thank them for their valuable advice and suggestion on her research, which is vital to the accomplishment of this thesis. The author has improved the thesis greatly with their suggestions and advice.
The author would like to record her gratitude to the following people: Firstly, the author wants to express her thanks to the secretaries Miss. Hamaguchi and Miss. Goto for their help in the daily life in the laboratory. Then, the author would like to express her thanks to all her classmates, especially to her group members Dr. Liang Zheng, Dr. Yaxin Li,Dr. Ruochen An, Dr. Maoxun Li, Mr. Yi Yao, Mr. Wenbo Sui, Mr. Hongbiao Yang and Mr. Ke Wang for their active ideas and hard working. At the same time, the author wishes to extend her thanks to Dr.
VI Study on Multi Spherical Underwater Robots with Hybrid-propulsion devices and Acoustic Communication systems
Zixu Wang, Dr. Peng Shi, Dr. Yi Liu, Mr. Dapeng Song, Mr. Ziyi Yang, and Mr. Weiwei for their advices or help on her life in Japan. Finally, the author would like to acknowledge the efforts of all her laboratory members again.
Last but not least, the author gives special appreciation to her family, especially her parents of their love, patience and support. They provided me with a strong financial guarantee and spiritual support. Without them, I might fall down with countless setbacks. The most important thing to thank is my husband, Dr. Linshuai Zhang. Whether in life, in research or in spirit, we can support each other, make progress together, and advance in unison. This experience of growing together gave me a lot of love and courage to face any difficulties.
I am extremely glad and proud to be in the doctoral course of Kagawa University, thanks for all the support that the University has provided to me.
Declaration VII
Ph.D. thesis of Dr. Shuoxin Gu
Declaration
I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning, except where due acknowledgment has been made in the text.
Chapter 1 Introduction 1
Ph.D. thesis of Dr. Shuoxin Gu
Chapter 1
Introduction
1.1 Thesis Scope
The underwater environment is full of unknowns, and there are many situations that humans have not developed and observed. he exploration and discovery in the unknown ocean are developed more and more quickly, so the unmanned underwater vehicles (UUVs) are also widely used in oceanographic research. In general, the UUVs could be listed in two categories according to different control methods: Remotely Operated Vehicles (ROVs) which are controlled by a remote human operator and Autonomous Underwater Vehicle (AUVs) which controlled independently without direct human input [1]. Usually, ROVs are connected to the base station as ship or tower by the umbilical cables. Due to this control method, the costs of labor and equipment are really high and the operation range is limited by the length of cables [2]-[3].
With the unceasing underwater exploration of the ocean, autonomous underwater vehicles (AUVs) have also been improved and developed for underwater detection. If AUVs in the unknown underwater environment can still maintain adequate flexibility and sensitivity, they can be suitable for a variety of complex underwater tasks. The IFREMER L’Eqaulard AUV was probably the first AUV which deployed for marine geoscience
2 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
[4]-[5]. The evolution of the exploration and discovery in the ocean is flourish recently. The AUVs are used in oceanographic study at large [6]-[7]. The different applications correspond to different configuration, size, propulsion methods, equipped function and control method of the AUVs. Robots need to rely on a lot of sensors, such as the GPS sensor, gyroscope sensor, depth sensor, communication module and so on, to make their functions more perfect, but also to ensure the suitable size and sufficient power [8]-[9].
Spherical Underwater Robot (SUR) is a kind of special structural underwater robot which has better compression performance. Due to its overall symmetry, there are no coupling items in fluid dynamics calculation, and the hydrodynamic parameters are also equal. Therefore, it has more extensive application. Considering the spherical shape has the advantages of high stability, flexibility and zero turning radius. There are many researchers in the world who are committed to developing spherical robots. Anirban Mazumdar et al. developed a ball shaped underwater robot which was completely smooth and used jets to propel and maneuver through water-filled environments such as the inside of nuclear powerplants [10]. MIT researchers also unveiled an oval-shaped submersible robot smaller than a football, flattened on one side and able to slide along an underwater surface to perform ultrasound scans [11]. But these two kinds of robots are both designed for special environments such as pipelines or confined spaces, with relatively simple forward and backward motion.
Chapter 1 Introduction 3
Ph.D. thesis of Dr. Shuoxin Gu
1.2 Literature Review
Based on the different configuration, size, propulsion modes, shapes, functions and materials, the AUV will correspond to different applications. The streamlined configuration is required for high-speed movements [12]. For Torpedo shape AUV, high speed and mapping can be understood as its advantages, and there are many mature products in the market, such as Bluefin-12 [13], Hugin 1000 [14], Sparus II AUV[15], ARCS and DOLPHIN [16] and so on. Figure 1-1 shows a small scaled streamlined AUVx which uses less than half the energy
when driving through the water than the previous design [17]. The flow field numerical simulation of an underwater vehicle with streamlined shape was carried out. The simulation results can play an important role in the optimal design of pump jet thruster and the hydrodynamic
Figure 1-1 Predecessor of the AUVx (µAUV2, left) and AUVx (right) in direct comparison [17]
4 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
characteristics of underwater vehicle [18]. The spherical shape also employs in an amphibious robot which can both walk on land and swim under water [19]-[21]. MIT researchers designed a robot called “Omni-Egg” which is smooth, spheroidal and completely appendage-free [22]. It used a novel pump-jet system built into the streamlined shell. Researchers at Harbin Engineering University also developed a spherical underwater robot with three water-jet thrusters [23]-[24]. A novel spherical underwater vehicle as shown in Figure 1-2 are designed for flooded mine tunnel exploration characterized by an innovative manifold system [25].
Chapter 1 Introduction 5
Ph.D. thesis of Dr. Shuoxin Gu
As we know, the propulsion system plays a critical role in controlling the underwater robot. And there are various designs for propulsion device, such as propellers, poles, magneto hydrodynamic drives, sails and oars. Especially, the propeller is the most common propulsion method for the underwater robots and vehicles. Chen et al. [26] proposed a design of foldable propellers for a hybrid-driven underwater glider as illustrated in Figure 1-3. The driven mode of the glider can be changed according to requirements by adjusting the statement of the propellers. And the simulation results show that the drag force can be reduced significantly when the glider is operating in the gliding mode compared with a conventional unfoldable design. Not only that, the propeller is also can be used in biomimetic underwater robots [27]-[29]. Lv et al. [30] developed a type of distributed pump-jet propulsion system (DPJP) with
Figure 1-3 The external structure of a HDUG whose folding propulsion device is aft located on the hull, the two blades can be completely open
6 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
two or four specially designed pump-jet pods located around the axisymmetric underwater vehicle body symmetrically. Watson S. A. et al. developed a micro-spherical underwater robot which used six propellers to generate propulsive force and this robot was designed for monitoring the nuclear storage pond and preventing leakage in wastewater treatment facilities [31]-[34]. However, its propeller thruster cannot adjust direction. A reconfigurable magnetic coupling thruster is designed and developed by researchers in Laboratoire Brestois de Mécaniques et des Systèmes. Based on the radial magnetic coupling as the joint, the vectorial propeller thruster can rotate and not contact directly with the motor [35]-[37]. Water-jet thrusters are also often used on underwater robots, which have the advantages of low noise, low vibration and drag. The research in [38]-[42] has applied this propulsion method to realize the movement of the underwater robot.
AUVs face different working conditions, thus many new underwater technologies are being explored and applied to AUVs. In addition to these applications, underwater bionic robots account for a large proportion of underwater detection. Because of the excellent diving capability of underwater creatures, some underwater robots are designed to mimic their characteristics. Heejoong Kim and Jihong Lee proposed a swimming pattern generator mimicking locomotion of diving beetles with the view point of biomimetics for legged underwater robots [43]. Hyung-Jung Kim et al. developed a turtle-like swimming robot with biomimetic flippers. This robot uses a smart soft composite structure to
Chapter 1 Introduction 7
Ph.D. thesis of Dr. Shuoxin Gu
realize smooth and soft flapping motion [44]. Coincidentally, researchers at Beijing Institute of Technology have also developed an amphibious spherical underwater robot that resembles a turtle. Their focus is on hybrid locomotion evaluation [45]. For documentation purposes, a biomimetic research autonomous vehicle is presented which consists of two different types of thrusters [46]. Researchers in the Tall University of Technology presents a biomimetic underwater robot U-CAT in Figure 1-4 with a novel 4-fin actuation [47]. Research [48] describes an underwater walking robotic system which allows to navigate and map clear shallower-water. These above robots imitate the appearance or
8 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
movement of aquatic creatures to better adapt to the underwater environment. Mollusks are also the key targets of bionics research in underwater robots. Both jellyfish [49]-[51] and octopus [52]-[55] have perfect underwater characteristics that are envied by robots.
Demands determination functions, many underwater robots develop in order to solve the real problem, in addition to satisfying the underwater flexible movement, it also added many functions, such as image recognition, robotic arm, path planning, ocean detection and so on. Researchers Youakim et al. develop a system named “Move it!” which can perform advanced free-floating manipulation to sue the valve-turning and connector plug/unplug benchmarks [56]. A modular robotic system which is shown in Figure 1-5 is investigated for self-reconfiguration to form a desired morphology and remedial action to meet task specific requirements [57]. Researchers at Stanford design the robust Ocean One
(a)Inspection of underwater (b) Object transportation by robots structures through a narrow passage multiple homogeneous
Chapter 1 Introduction 9
Ph.D. thesis of Dr. Shuoxin Gu
hand with utilizes elastic finger joints and a spring transmission to achieve a variety of pinch and wrap grasps. The robot got a vase in the underwater shipwreck, indicating the future potential value of the robot for underwater exploration and archaeology [58]. Other mechanical arms design wants to realize the calculation of the posture or position of the robot to complete the underwater manipulation tasks [59]-[60]. Path planning as an important function of underwater robots, has been studied by many scholars [61].
With the increasing demand, more additional functions like underwater wireless communication, positioning and navigation are applied to the underwater vehicles [62]-[64]. Common underwater wireless communication methods include electronic, acoustic, optical and laser communications [65]. Li et al. [66]in Kagawa University designed a blue LED-based underwater optical communication system for a Father-son robot system. Although the electromagnetic wave is greatly attenuated underwater, researchers in Peking University is inspired by the weakly electric fishes and designed an artificial electrocommunication system for small underwater robots [67]. The laser usually enables high-speed and long distances underwater wireless communication, Wu et al. employs a 450-nm blue GaN laser diode to implement its maximal transmission capacity up to 10 Gbps [68]. Among these underwater communication methods, the UWAC with the advantages of flexibility, convenience and wide spread is payed more attention and used in the underwater wireless communication research.
10 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
The complexity and uncertainty of the underwater acoustic channel make it as the key technology of this research. Ren et al. proposed an acoustic communication method with low Bit Error Rate which used a hybrid dynamical system to generate a chaotic signal and a corresponding chaotic matched filter to offset the effect of multipath propagation and noise [69]. For multiuser underwater acoustic communication, the multi-chirp rate signals which can be separated from each other by fractional Fourier transform was raised by researchers in Xiamen University [70]. For underwater acoustic communication, the boundary reflections and Doppler shift effects need to be taken into account, Gutiérrez et al. present a modified Rayleigh fading communication channel model [71]. A team of robotic boats as shown in Figure 1-6 can automate self-assemble for forming into floating platforms which will accelerate humanitarian missions or disaster relief [72]. Another research [73] uses
Chapter 1 Introduction 11
Ph.D. thesis of Dr. Shuoxin Gu
an acoustically controlled soft robotic fish to explore the life of underwater creatures.
In our previous research, the First-generation Spherical Underwater Robot (SUR I) equipped with multiple vectored water jet-based thrusts was proposed and designed [74]-[79]. The SUR I can achieve 3-DoF motion underwater. On this basis, [80]-[84] described the development of the second-generation Spherical Underwater Robot (SUR-II). The hydrodynamic analysis was carried out to verify the estimated parameters such as the velocity vectors, pressure contours and drag coefficient [85]-[86]. In the follow-up study, a father-son underwater intervention robotic system was proposed to realize the underwater manipulation for the narrow space exploration [87]-[88]. The next development of the SUR was that [89]-[90] proposed the third-generation spherical underwater robot (SUR III) with four water-jet thrusters. And the acoustic communication methods were also proposed for SUR III [92]. Then [93] proposed the research of the performance evaluation of the SUR III in the static mechanical and hydrodynamic analysis. Based on the previous view, [94] proposed a hybrid propulsion device for the SUR III. However, few designs have taken a hybrid propulsion device on an underwater robot into consideration. The device can provide advantages such as keeping stability and accuracy to the specific location with the low-speed mode, improving velocity to a certain area with the high-speed mode. On the downside, the low-speed mode robot will waste a lot of time for long distance navigation, and
12 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
high-speed robot close to the object with a lot of noise and can’t guarantee the accuracy of position. Therefore, it is extremely important for underwater robots to provide a hybrid propulsion mode of high and low speed, as well as keep quiet in low speed mode during ocean inspections.
1.3 Thesis Objectives
Generally, Due to the advantages of spherical underwater robot, the fourth-generation spherical underwater robot (SUR-IV) with the hybrid propulsion device was designed. In order to achieve the communication and cooperation of the Multi-SURs. The communication system was realized in this research. To achieve the overall objective, this thesis has the following set of sub-objectives:
(1) A novel hybrid propulsion device is designed to realize multi-propulsion modes, high stability, high efficiency and quiet performance. The hybrid propulsion device includes both propeller and water-jet thrusters.
(2) Hydrodynamic analysis is very important for the underwater robot. In order to investigate the reasonability of the robot design, hydrodynamic analysis of the hybrid propulsion device and the SUR IV are carried out.
(3) A novel spherical underwater robot is developed with the hybrid propulsion device. The improvement of the mechanical structure, hardware design and the control method make the robot to achieve high
Chapter 1 Introduction 13
Ph.D. thesis of Dr. Shuoxin Gu
efficiency motion in multi-DoF.
(4) To verify underwater characteristics of multi-DoF motions of the SUR IV, the performance evaluation in DoF as surge, heave and yaw are conducted in a swimming pool. The robot completes the basic motion of forward, diving, floating and rotation.
(5) The communication system between base station and multi-SURs is established by using the acoustic communication modem. The communication principles are formulating as the basic rules for this system. The multi-channel communication and instruction set are developed for the cooperation motion of the Multi-SURs.
1.4 Thesis Overview
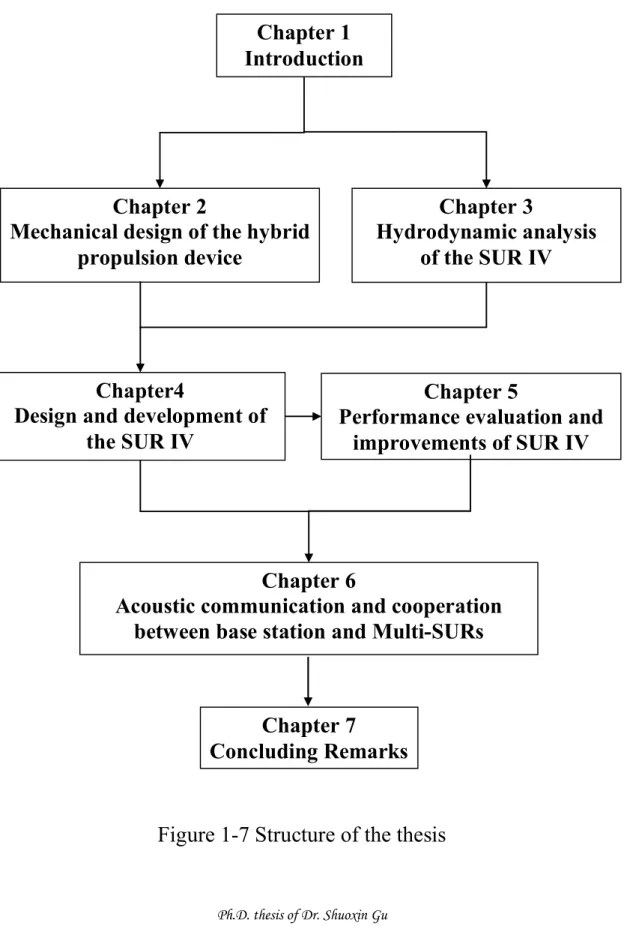
This thesis is organized with the following chapters:
In chapter 2, the mechanical design and static model of the hybrid propulsion device are proposed to realize multi-propulsion mode, high stability, higher efficiency and quiet performance.
In chapter 3, the hydrodynamic analysis for the rationality of the layout of the hybrid thruster is executed. The Computational Fluid Dynamic (CFD) simulation of the SUR IV with drag coefficient is conducted.
In chapter 4, the geometry and motion state of the SUR IV are presented for Multi-DoF motion underwater. The development of the mechanical structure, hardware design and control method for the SUR IV are proposed.
14 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
spherical underwater robot, the motion experiments in multi-DoF are carried out in the swimming pool. The experimental results show the better characteristic of the SUR IV than the previous design.
In chapter 6, the acoustic communication system between base station and multi-SURs is established. The accuracy, effectiveness and timelines of the communication system are verified by series of experiments. The communication principles are proposed for cooperation motions. On that basis, the instruction set with multi-channel communication is developed and achieved.
Chapter 1 Introduction 15
Ph.D. thesis of Dr. Shuoxin Gu
Figure 1-7 Structure of the thesis Chapter 1
Introduction
Chapter4
Design and development of the SUR IV
Chapter 2
Mechanical design of the hybrid propulsion device
Chapter 5
Performance evaluation and improvements of SUR IV
Chapter 7
Concluding Remarks Chapter 6
Acoustic communication and cooperation between base station and Multi-SURs
Chapter 3
Hydrodynamic analysis of the SUR IV
Chapter 2 Mechanical design of the hybrid propulsion device 17
Ph.D. thesis of Dr. Shuoxin Gu
Chapter 2
Mechanical design of the
hybrid propulsion devices
The propulsion system as the main power for the underwater robot will extremely influence its hydrodynamic performance. A novel hybrid propulsion device for the fourth-generation spherical underwater robot (SUR IV) is proposed in this Chapter. To the limited space and mechanism, the novel hybrid propulsion device not only reserves the symmetric structure to maintain balance underwater, but also enhances the better property. And the diversity of the propulsion mode is also proposed for the different target as remoting or hovering. The design of the SUR propulsion device in the previous study introduced at the beginning of this chapter. Due to the single propulsion mode and insufficient power, a new generation of propulsion device with both propeller and water-jet thruster is realized. The static and dynamic simulation are conducted for verifying the stability and rationality of the layout of the hybrid propulsion device. The thrust experiments are executed to confirm the high efficiency of the hybrid propulsion device.
18 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
In this chapter, a brief introduction to the fundamental concepts and mechanical design of the hybrid device for SUR IV has been presented. The structure design of the novel hybrid propulsion device was completed to realize the multi-propulsion mode. The performance of stability, higher efficiency and quiet performance for the proposed hybrid propulsion device was evaluated by experiments.
Chapter 3 Hydrodynamic analysis of SUR IV 19
Ph.D. thesis of Dr. Shuoxin Gu
Chapter 3
Hydrodynamic analysis of SUR
IV
The underwater environment is complicated to the AUV. The hydrodynamic analysis of the SUR III described in this section is for getting theoretical basis which will provide initial conditions of the simulation. In this chapter, the hydrodynamic analysis of the SUR IV was presented as two different motions: surge and heave. The equation (11) shows the relationship between mass, resistance and propulsive force. Although the SUR IV is 1.3kg heavier than SUR III in air, the resistance variety is not greater than the previous research [21]. The variety of mass underwater is less than that in air and the propulsive force is improved significantly, so the speed of the SUR IV will be enhanced. When the robot moves at a constant speed, the acceleration is equal to 0, then from equation (3.11) the resistance can be obtained and is equals to the propulsive force. The movement process of the SUR IV can be inferred, the initial stage is an acceleration process, the propulsive force will be greater than the resistance, then the speed of the robot reaches a constant, the propulsive force will be the same as the resistance, finally the robot
20 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
reaches the target and the speed is slow down, the propulsive force will be less than the resistance.
According to the influence of edges and gaps in the SUR IV, two kinds of methods were given to analyze the drag coefficient. In surge motion, the drag coefficient is 0.4 which can be selected according to the Reynolds number. Thirdly, the hydrodynamic model for CFD simulation was established. Some relevant parameters and conditions were presupposed in the pre-processing. And the pressure contours, velocity vectors and velocity streamlines were obtained from the post-processing. The maximum pressure occurred in the top, bottom and near the edge in heave motion. The maximum resistance was obtained in down motion. The drag coefficient was calculated by hydrodynamic equation and it equals to 0.386. This indicates that edges and gaps effect little. The calculated drag coefficient in surge motion is 0.394, it has a 1.5% error compared with the chosen one, which indicates the robot can be similarly considered as a sphere.
Chapter 4 Development and design of the SUR IV 21
Ph.D. thesis of Dr. Shuoxin Gu
Chapter 4
Development and design of the
SUR IV
In our previous research, a spherical underwater robot was proposed with multi vectored water-jet thrusters. The first and second-generation spherical underwater robots both owned three vectored water-jet thrusters which are evenly distributed around the shell of the robot. In order to enhance the power management, the third-generation spherical underwater robot (SUR III) was developed with four vectored water-jet thrusters symmetrically distributed.
As the conceptual design of the hybrid propulsion device was mentioned in Chapter 2. Although the vectored water-jet thruster has the advantage as low noise, but the propulsive thrust is limited by the space and structure. The propeller thruster is often employed in the propulsion systems for underwater robots. Its good power performance and reliability are all we need. However, the noise of the propeller is higher than the vectored water-jet thruster. Therefore, a novel generation spherical underwater robot is proposed with the hybrid propulsion device. In the underwater mission, using the hybrid mode or propeller mode can quickly and effectively close to the target, then switch the
22 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
water-jet propulsion mode to reduce the noise near the target.
In this chapter, the development and design of the novel spherical underwater robot are discussed. The SUR IV still uses four sets of hybrid thrusters units in a symmetrical circular arrangement. We have improved the machining accuracy of the spherical shell, so that the opening of the spherical shell can ensure the free movement of the hybrid propulsion unit and the appearance. At the same time, a tripod fixed to the lower spherical shell is used to support the weight of the waterproof bin. For the hardware design, three functional control system are used for the SUR IV as propulsion system, localization system and communication system.
Chapter 5 Performance evaluation and improvement of SUR IV 23
Ph.D. thesis of Dr. Shuoxin Gu
Chapter 5
Performance evaluation and
improvement of SUR IV
In order to evaluate the performance of the novel SUR IV, some experiments are carried out in this Chapter. The prototype of the SUR IV is shown in Figure 5-1. The underwater characteristics of the SUR IV are also the focus of this research. The underwater experiments were completed in a swimming pool with the length of 25 meters, the width of 11 meters and the depth of 1.1 meters. The experiments are divided into the following cases: high-speed forward motion in surge, diving and floating motion in heave, and rotation motion in yaw.
In this chapter, the underwater performance of the SUR IV in 3 DoF was evaluated in the swimming pool. Experiments including high-speed forward motion, diving and floating motion, and rotation motion were completed and compared with the previous design. The experimental result displays that the linear speed of the hybrid propulsion mode is 33.3% higher than that of the SUR III. The efficiency of other motions is also enhanced by comparing with the previous design. The design of the novel SUR IV has achieved our intended purposes.
Chapter 6 Acoustic communication and cooperation between base station and Multi-SURs 25
Ph.D. thesis of Dr. Shuoxin Gu
Chapter 6
Acoustic communication and
cooperation between base
station and Multi-SURs
The wireless communication as the key technology for the underwater robot will implement the underwater observing, cooperation or collaboration. As we mentioned in Chapter 4, the Underwater Acoustic Communication System (UWAC) is used for the SUR IV. Considering that UWAC needs to overcome the multi-path effects, time-varying effects, narrow available bandwidth and doppler effects, a Micron data modem is chosen as the communication module. This modem uses the CHIRP signal which can change the frequency with time to achieve the acoustic communication. The hardware of the UWAC system is established in Chapter 4. This system as a subsystem serves the overall control of the SUR IV. With the relative movement of the underwater robot in actual work in mind, the mobile acoustic communication is proposed. The influence of the Doppler shift and propagation loss underwater for the SUR IV are analyzed.
26 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
acoustic modems with the aid of localization system. Experiments in the tank verify the BER of the UWAC system is 0. Further, the experiments in the pool also proved the accuracy, effectiveness and timeliness of the communication system. In order to realize the communication and cooperation between base station and Multi-SURs, the instruction set with multi-channel communication was established. The instruction set includes conventional, unconventional and reduced instructions. The maximum number of accommodated robots for multi-channel is 255 in this research. Finally, the communication and cooperation experiments show that the base station, master robot and slave robot can cooperate well with each other to finish some simple tasks.
Chapter 7 Concluding Remarks 27
Ph.D. thesis of Dr. Shuoxin Gu
Chapter 7
Concluding Remarks
7.1 Contributions and achievement
Autonomous underwater robots are ordinary instruments for underwater investigation. Human demands for underwater exploration are like snowballing and continues to grow. The work efficiency, movement mode, hydrodynamic characteristics, and functional development of an underwater robot are all goals that are urgently needed to break through. This thesis focused on the development of a novel spherical underwater robot to enhance the efficiency, hydrodynamic power and functions. A hybrid propulsion device was proposed for the novel SUR with propeller and water-jet thruster to enhance the efficiency and hydrodynamic performance. Facing the complex task, single robot is not enough, the function as acoustic communication is established for the communication and cooperation of multi-SURs. The objectives of this thesis can be summarized as the following points:
(1) A novel hybrid propulsion device needs to be designed to realize multi-propulsion modes, high stability, high efficiency and quiet performance. The hybrid propulsion device includes both propeller and water-jet thrusters.
28 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
order to investigate the reasonability of the robot design, the hydrodynamic analysis and simulation of the hybrid propulsion device and the SUR IV should be carried out.
(3) A novel spherical underwater robot needs to be developed based on the hybrid propulsion device. The improvement of the mechanical structure, hardware design and the control method should make the robot to achieve high efficiency motion in multi-DoF.
(4) To verify underwater characteristics of multi-DoF motions of the SUR IV, experiments in multi-DoF as surge, heave and yaw need to be conducted to evaluate the performance of the novel SUR.
(5) In the face of complex tasks, considering the limited role of single spherical underwater robot, the cooperation motion between multi-SURs based on underwater communication needs to be included in our objectives.
In order to achieve these objectives, a lot of works have done in this research and achieved some results. The contributions and achievements to this research can be summarized in the following areas,
(1) A novel hybrid propulsion device with water-jet and propeller thrusters was designed to realize multi-propulsion mode as hybrid, propeller and water-jet mode in Chapter 2. The static simulation results show the better stability of the hybrid propulsion device than before. The CFD simulation results also show the good hydrodynamic performance of the novel propulsion devices. The experimental results show the characteristics of high stability, higher efficiency and
Chapter 7 Concluding Remarks 29
Ph.D. thesis of Dr. Shuoxin Gu
quiet performance of the propulsion device. This kind of propulsion device also can quickly switch the high-speed and low-speed motion. (2) The hydrodynamic analysis was developed for the spherical underwater robots with drag coefficient calculating in Chapter 3. The CFD simulation results show that although the SUR IV is not a perfect and closed sphere, its drag coefficient in different DoF still conforms to the spherical feature. This discovery provides a direction for the subsequent robot design, and also provides theoretical and experimental basis for the underwater drag coefficient of the spherical robot.
(3) A novel spherical underwater robot based on the hybrid propulsion device was proposed to achieve high efficiency motion in multi-DOF as surge, sway, heave and yaw in Chapter 4. The details of the structure design with the hybrid propulsion device and other parts of the robot was presented. The hardware with the application of sensors was introduced as the development of functions for this kind of design. The software design of the novel SUR also provided to express the control strategy of the single SUR or multi-SURs. This part will provide the basis and guidance for the future research in the related field.
(4) To verify the characteristics of the novel SUR IV. Experiments in multi-DoF of the SUR IV were carried out in the swimming pool. The basic motions as forward, diving, floating and rotation were all evaluated with the SUR IV. The high work efficiency of hybrid mode
30 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
of the robot was performed in all motions in experiments. The good stability was played in forward motion and diving motion.
(5) The acoustic communication system between the base station and Multi-SURs was achieved with the aid of the localization system in Chapter 6. The acoustic modems were equipped to establish 500 meters of horizontal communication and 150 meters of vertical communication. The experimental results show the accuracy, effectiveness and timelines communication of this system. The communication principles as the basis of the communication and cooperation motion between base station and multi-SURs were provided. These principles are rules for subsequent learning on cooperation motion. The instruction set, including conventional instructions, unconventional instructions and reduced instructions, is implemented that consists of different character lengths, multi-functions and multi-channels. The establishment of the instruction set reduces the communication frequency and increases the diversity of communication capabilities. The multi-channel communication was established with the maximum number of accommodated robots as 255.
7.2 Future Discussions
In the future, it is essential to continue the research on underwater acoustic communication and cooperation between multi-SURs. Our exploration of the communication and cooperation with multi-SURs is
Chapter 7 Concluding Remarks 31
Ph.D. thesis of Dr. Shuoxin Gu
just beginning, and there are still many unrealized studies that need to be further explored and validated. For example, the array arrangement of multiple robots, the rounding of static objects or dynamic objects by multiple robots, the task planning of multi-robot in 3D space, and so on. The current instruction set also needs to be expanded to accomplish the above tasks.
Publication List 33
Ph.D. thesis of Dr. Shuoxin Gu
Publication List
International Journal Papers
1. Shuoxin Gu, Shuxiang Guo, “Performance Evaluation of a Novel Propulsion System for the Spherical Underwater Robot (SUR III)”, Applied Sciences, Vol. 7, Issue 11, 1196, 2017
2. Shuoxin Gu, Shuxiang Guo, Liang Zheng, “A highly stable and efficient spherical underwater robot with hybrid propulsion devices”, Autonomous robots, in press (Accepted)
International Conference Papers
1. Shuoxin Gu, Shuxiang Guo, Liang Zheng, “Characteristic Evaluation of the Mobile Acoustic Communication for Spherical Underwater Robots (SUR III)”, In Proceedings of 2018 IEEE International Conference on Mechatronics and Automation, pp. 2191-2196, 2018
2. Shuoxin Gu, Shuxiang Guo, Linshuai Zhang, Yi Yao “A Hybrid Propulsion Device for the Spherical Underwater Robot (SUR III)”, In Proceedings of 2017 IEEE International Conference on Mechatronics and Automation, pp.2358-2363, 2017
3. Shuoxin Gu, Shuxiang Guo, Liang Zheng, Ruochen An, “Turning Locomotion Analysis and Performance Evaluation for a Spherical
34 Study on Multi Spherical Underwater Robots with Hybrid-propulsion Devices and Acoustic Communication Systems
Underwater Robot”, In Proceedings of 2019 IEEE International Conference on Mechatronics and Automation, accepted
Others
1. Liang Zheng, Shuxiang Guo, Shuoxin Gu, “The communication and stability evaluation of amphibious spherical robots”, Microsystem Technologies, Vol. 24, pp.1-12, 2018
2. Liang Zheng, Shuxiang Guo, Shuoxin Gu, “Structure Improvement and Stability for an Amphibious Spherical Robot”, Proceedings of 2018 IEEE International Conference on Mechatronics and Automation, pp.1586-1590, 2018
3. Hongbiao Yang, Xiufen Ye, Shuxiang Guo, Shuoxin Gu, Shangze Chen, “Hydrodynamic Analysis of Water-jet Thrusters for the Spherical Underwater Robot (SUR III)”, Proceedings of 2017 IEEE International Conference on Mechatronics and Automation, pp.1354-1359, 2017
4. Linshuai Zhang, Shuxiang Guo, Huadong Yu, Shuoxin Gu, Yu Song, Miao Yu, “Electromagnetic Braking-based Collision Protection of a Novel Catheter Manipulator”, Proceedings of 2017 IEEE International Conference on Mechatronics and Automation, pp.1726-1731, 2017
Biographic Sketch 35
Ph.D. thesis of Dr. Shuoxin Gu
Biographic Sketch
Shuoxin Gu received the B.S. degree at Changchun University of Science and Technology (CUST), China, in 2011 and received the M.S. degree at Jilin University (JLU), China, in 2015. Now, Miss. Gu is as a Ph.D. candidate in Intelligent Mechanical Systems Engineering, Kagawa University (KU), Japan. She has published 2 conference papers and 1 journal paper in recent years. Her current research interests are spherical underwater robotics; bio-inspired robotics.
![Figure 1-1 Predecessor of the AUVx (µAUV2, left) and AUVx (right) in direct comparison [17]](https://thumb-ap.123doks.com/thumbv2/123deta/5737758.1020681/13.892.138.771.710.985/figure-predecessor-auvx-µauv-auvx-right-direct-comparison.webp)
![Figure 1-2 Photographs of the Omni-Egg prototype [25]](https://thumb-ap.123doks.com/thumbv2/123deta/5737758.1020681/14.892.142.745.580.1032/figure-photographs-omni-egg-prototype.webp)

![Figure 1-4 The U-CAT vehicle [47]](https://thumb-ap.123doks.com/thumbv2/123deta/5737758.1020681/17.892.137.769.585.1003/figure-the-u-cat-vehicle.webp)
![Figure 1-5 Concept images depicting possible tasks [57]](https://thumb-ap.123doks.com/thumbv2/123deta/5737758.1020681/18.892.126.760.736.952/figure-concept-images-depicting-possible-tasks.webp)
![Figure 1-6 Floating platform by a team robotic boats [73]](https://thumb-ap.123doks.com/thumbv2/123deta/5737758.1020681/20.892.155.726.719.1038/figure-floating-platform-team-robotic-boats.webp)