AN
EVOLUTIONARY THEORY OF CONFLICT
RESOLUTION
BETWEEN RELATIVES:
ALTRUISM, MANIPULATION,
COMPROMISE
Norio Yamamura (山村則男)
DepartmentofNatural Sciences, Saga Medical School, Nabeshima, Saga 849,Japan
and
Masahiko Higashi (東正彦)
Faculty ofScienceandTechnology, Ryukoku University, Seta, Otsu520-21, Japan
Many
cases
of conflict between relativesover
the evolution of social behaviorare
known ($e$.
$g.$,Dawkins, 1976; Trivers, 1985), butno
generaltheory incorporates theconsequences
ofconflict. Herewe
show how compromise solutionsmay
evolve. We derive the compromise solutionbyincoIporating conflictcosts into the fitnessevaluation. Specifically, for donor-recipientconflict concemingaltruism,
we
find thataltruismevolvesmore
easily thanHamilton’sRule(Hamilton, 1964)wouldpredict forthe
case
withno
effective manipulation bytherecipient, whereas in theopposite case, where the donor camotresist therecipient’s manipulation, the behavior evolves less easily than the Inverse Hamilton’s Rule would predict. The theory also indicates conditions under which
no
compromise is reached, and physical conflictis manifested.For the Hymenoptera, ithas been debated whetherthe evolution of sterile workercastes is duetokin selection fordaughters’ $al\alpha uistic\sim$behavior towardtheir mother(Hamilton, 1964),
or
to the development ofthe mother’s manipulation which forces “unwiUing” daughters toserve
her(Alexander, 1974; Chamov, 1978).Trivers (1974) considered the problem of parent-offspring conflict
over
parentalinvesmlent. In
many
cases
besides these theexistence
of conflicthas been stressed,butthere hasbeen remarkably little work
on
theimportant problem of where theconflict should lead. As in the
case
of mother-daughterconflict inthe evolution of sterile workers, settlement ofthe conflict has been consideredto be simplya
matterofconquest by the stronger (e.g.,mother’s
manipulation).
But both sides engaged inany
conflictare
expected topay
some
cost, and if the costsare
taken intoaccount, it
seems
that the outcome shouldbe affected bynot only the relativestrengths oftheplayers, but also by theirrelative benefits (or losses) whentheywin
(or lose)the conflict.
Here
we
presenta
general scheme by which rulesmay
be derived for theconflict. Akey idea inthis scheme is the incorporation ofconflictcosts into the inclusive fitness evaluation. We illustrate the general scheme,using
as a
modelcase
the donor-recipient conflictover
the evolutionofaltruisticbehavior.Consider the evolution of
an
altruistic behavior by the donor(hereafterreferredto
as
D) that decreases itsown
fitness by$C$and increases by$B$the fitness of therecipient (hereafter R). A symmetricgenetic relation between$D$ and $R$is assumed
with degree of relatedness $r$
.
The condition for the altruistic behavior of$D$ (without$R’s$ control) tobe favoured by selectionis thatthe inclusive fimess of$D$ is greater
whenit perfonns this altruistic behavior than whenit does not: $W_{D^{-}}C+rB>W_{D}$,
where $W_{D}$ is $D’ s$ fitness without
any
social interaction (Hamilton, 1964). Fromthis,Hamilton‘sRule immediately follows:
$\frac{B}{C}>\frac{1}{r}$
.
(1)On the otherhand, the condition for this altruisticbehavior to increase$R’s$
inclusive fimess is $W_{R}+B+r(- C)>W_{R}$, where $W_{R}$ is $R’s$ fitness without
any
socialinteraction.
From this followsa
differentrelationship,旦$>$ ’
(2)
which
may
be called the Inverse Hamilton‘s Rule. Even if the recipientcould force the donortoperfonn the altruistic behavior, the recipient shouldnot doso
whencondition (2)does nothold.
The
gap
between conditions (1) and (2) impliesa
conflict. If$B/C$lies between$r$and $1/r$ , i.e.,
$r< \frac{B}{C}<\frac{1}{r}$
then$D$ shouldnotperfonn the altruistic behavior [because condition(1) does not
hold], whereas $R$ should attempt to make$D$ perfonn;he altruistic behavior
[because condition (2) doeshold] (seeFig. 1). Notice that the conflict regionis
reducedwith$r$,banishing when $r=1$; thereexists
no
conflictbetween geneticallyidenticalindividuals. Onthe contrary, when $r=0$, the $con^{b}flict$regionexpands to
the whole regionofpositive values of$B$ and$C$
.
However, ifcosts involved in theconflict
are
takeninto accountin the inclusivefitness evaluation, then this potential conflict
may
havean
evolutionaryresolution.Here, by costs involvedinthe conflict,
we mean
reduction inthe fimess ofthe recipient inmanipulating the donor and that of the donorin resisting againstthe recipient’s control. Thereexists in the $(C, B)$-space
a
critical line that divides theconflictregiondefined by condition (3) intotwo sub-regions. Inthe sub-region
above the line the donorisselected to avoid conflictby perforning thealtruistic
behavior, whereas in the sub-region belowthe line the recipient shouldavoid
conflictbynotattempting tomanipulate the donor. Tluis compromiseline forthe
donor-recipient conflictis
$\frac{B}{C}=\frac{2kr+r^{2}+1}{k(r^{2}+1)+2r}$ (4)
Aderivation follows.
Suppose thatparameters $(C, B)$ take values thatfallinthe conflictregion defined
by condition (3). Let$d_{D}$ and$d_{R}$,respectively, denote the costspaid by $D$ and$R$ in
pursuing theconflict, and
assume
that $R$win dominate $D$inthe conflict when$u_{R}>$$d_{D}$,whereas $D$ will dominate $R$when$kd_{R}<d_{D}$
.
Thatis, inorder for$D$toresist
$R$,it
has topay
$k$timesas
much costas
$R$ does; thus,$k$represents the degree ofThen, $D$ and$R$ willevolveto increase theirconflict costs inorderto rival each
other. When they build theircosts
up
to $d_{D}(=u_{R)}$ and$d_{R}$, respectively, theinclusive fitness that $D$ would
eam
in thecase
ofwinning the conflict should bereduced to $W_{D}- kd_{R}+r(- d_{R})$, and that of$R$ to $W_{R}- d_{R}+B+r(- C- kd_{R})$
.
(Notethat the costofconflictpaid by
one
side contributesa ne
ative effecttonot onlv itsown
fitness. but also to the other’s inclusivefimess through theirrelatedness $r.$) As the conflictcosts $(d_{R})$ increase,the inclusive fitness of$D$ (or R) will decline towardthe value thatit would take ifit yieldedto the otherinthefirst place. Eventually, the better choice for $D$ (or R) is to yield to $R$(or D), and the altruistic behavior will (orwillnot)evolve.
Theconditionthat$D’s$ inclusive fitness value in the
case
ofwinning is greaterthan itwould be in the
case
ofavoiding theconflict inthe firstplace is givenas
$W_{D}-$$kd_{R}+r(- d_{R})>W_{D}- C+rB$,
or
equivalently$Ckd_{R}^{R}B_{-}+d< \frac{1}{r}$
(5)
The
same
condition for$R$ is givenas
$W_{R}- d_{R}+$$B+r$(-C- $kd_{R}$) $>W_{R}$,or
equivalently
$\frac{B- d_{R}}{C+kd_{R}}<r$
.
(6)[For
a
geometric interpretation in$(C, B)$-space
of conditions (5) and (6),see
Fig. 1and its legend.]
Therefore, the conditionthat$D$ should yield to $R$ andperforn the altruistic
behavior is that for
some
$d_{R}$, both sides of condition (5) becomeequal toeachother, while inequality (6) stillholds. Eliminating $d_{R}$ from thesetwo conditions,
we
$\frac{B}{C}>\frac{2kr+r^{2}+1}{k(r^{2}+1)+2r}\equiv g(r, k)$
.
(7)Likewise, the condition for$R$to yieldto$D$ andnot attempt to inducethe altruistic
behavioris givenby inequality (7)withthe opposite inequalitysign$(<)$
.
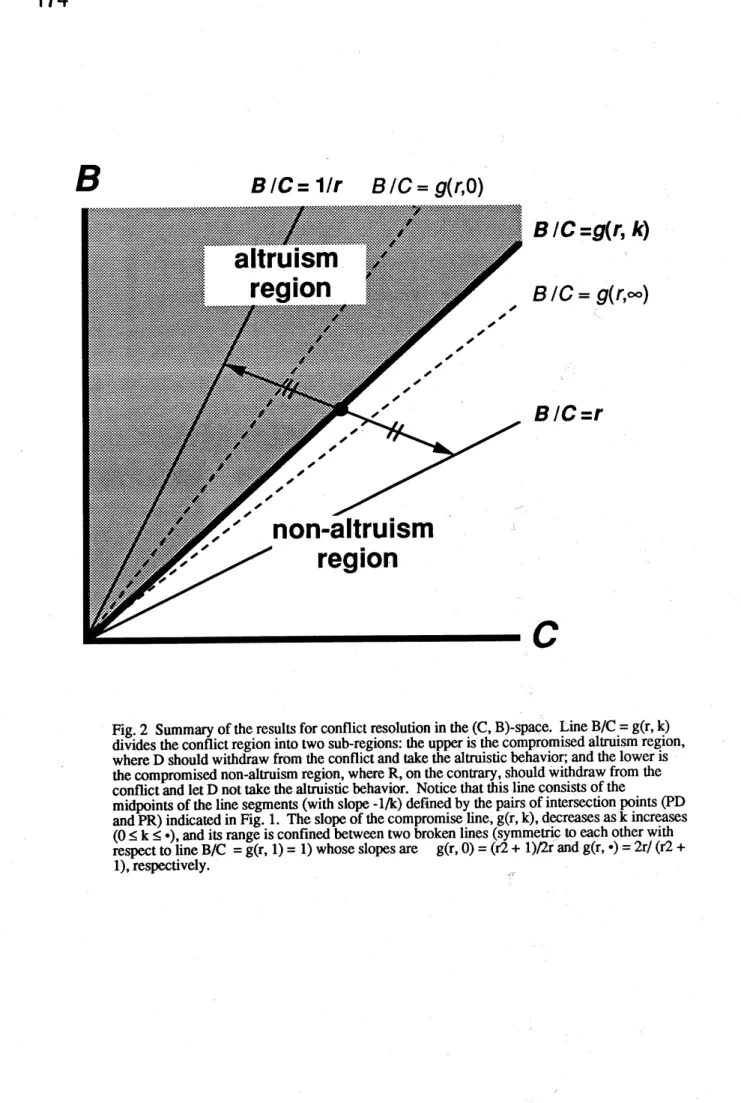
Therefore,the compromise line, whichrepresents the criticalcondition for the evolution of the altruisticbehavior, is givenbyequation(4) (Fig.2).
$J$
$7he$ slope of the compromiseline, $g(r, k)$, decreases withincreasing $k(0<k<\infty)$
and is confined between$g(r, 0)=$ $(r^{2}+1)/2r$ and$g(r, \infty)=2r/(r^{2}+1)$
:
$r \leq\frac{2r}{r^{2}+1}\leq g(r,k)\leq\frac{r^{2}+1}{2r}\leq\frac{1}{r}$ (8)
where $0\leq r\leq 1$ and the equalities of both ends hold only when$r=1$
.
The highestand lowestvalues of$g(r, k)$
are
the arithmeticmean
and the hannonic mean,respectively, of$r$ and $1/r$
.
Thus,even
for theextremecase
($karrow 0$or
$\infty$)thecompromiseline does notreach theboundary lines of the conflict regionunless $r$
$=1$,
as
virtually
no
cost($d_{R}=\Delta_{D}\underline{/karrow 0)}$
duetoitsabsolutedominanceincontrol$(karrow\infty)$.
$\underline{fi}tnessW_{-}+B+\mapsto\gamma(- C- d_{D}).throu\underline{g}h$their relatedness $(r)$
.
Similarlv.even
if$D$has($karrow OI$
.
the cost$d_{L}\underline{oaid}$
by$R$ (inthe efforts ofretaining$D$ for the altruistic servicerelatedness $(r)$
.
This fact hasan
implication that demandsa
revision
ofHamilton’sRule and the InverseHamilton‘sRule,unless conflictcosts
are
allnegligible,as we
see
inthefollowing.First, for the
case
ofno
effective manipulation by $R(karrow 0)$, the threshold valueof$B/C$ forthe altruistic behaviorto evolve for each value of$r$,
$\frac{B}{C}=g(r, 0)=\frac{r^{2}+1}{2r}$ (9)
is much lower than the
one
thatHamilton’s Rule predicts (Fig. 3). Forexample, when$r=1/2$ and 1/4, respectively, Hamilton’sRule predicts that$B/C$mustbe2.0
and
4.0
forthe altruistic behaviorto evolve, whereas thenew
theory predicts that itmustbe
more
than only1.25
and 2.125. Orwhen$B/C$ is 2.0, Hamilton’s Rulepredicts that$r$mustbe
more
than 1/2 for the altruistic behaviorto evolve,whereasthe
new
theory predicts that it must bemore
than only0.268.
For the
case
ofno
effectiveresistance by$R(karrow\infty)$, the threshold value of$B/C$forthe altruistic behaviorto evolve is
$\frac{B}{C}=g(r, \infty)=\frac{2r}{r^{2}+1}$ (10)
This is muchhigherthan the$B/C$ ratiopredicted by the Inverse Hamilton‘s Rule
predicts (Fig. 3). Forexample,when $r=1/4$ and 1/2,respectively, the Inverse Hamilton’sRule predicts that$B/C$must be only
0.25
and0.5
for the altruisticbehaviorto evolve, whereas the
new
theoIy predicts that itmustbemore
than0.471
and0.8.
Or when$B/C$is 0.5, theInverse Hamilton’s Rulepredicts that$r$mustbe less than 1/2for the altruisticbehaviorto evolve, whereas the
new
theory predicts that itmust be less than0.268.
Finally, the theory developed here indicates under what conditions
no
compromise is reached, and physical conflict
may
ensue.
Ingeneral, theparameters $B,$ $C$,and$k$
are
not constant in specific conflictscenes.
In sucha
case,bothplayers $D$ and$R$ will evolveto adoptconditional strategies,depending
on
theis
exactly correct,a
compromise willbe reached,as
derived above. Ifone
of thetwo incorrectlyestimates theparameters and ifboththink they
can
winthe conflict,then the conflict will$actua\mathbb{I}y$ start. Specifically, when theparametervalues
are
closeto thecompromise line, then the judgment, whether tofight
or
not, will be difficult.Therefore,
we
can
say
thatthe closer the parametervaluesare
to the compromiseline (i.e., satisfyingthe critical condition (4) for the evolution ofaltmism), the
more
likely it is that
no
compromisewillbe reached,and physical conflict will be actuallyB
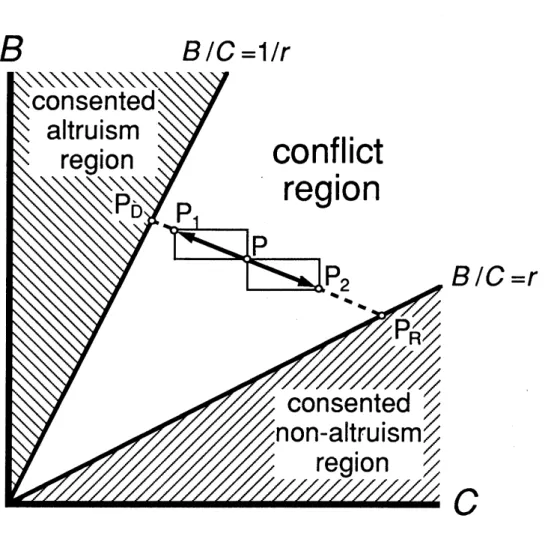
$B/C=1/r$Fig. 1Threeregions in$(C, B)$-spacewith differentimplicationsfor theevolution ofanaltruistic behaviorof
donor(D)towardrecipient(R). Themiddle region definedbycondition(3)is the regionof conflict between$D$
andR. The outerregionsdefinedbyinequalities $B/C>1/r$and$B/C<r$ arethe regionsofconsensusbetween$D$
and$R$:the$fo$–eris the$alm_{1}ism$region,wherein thesenseofevolutionarychoice,R”wants$D”$,and$D$“is
willing”,totakethe$a$]$m_{1}istic$behavior,while thelatter isthenon-altmism region,where$D$”wants”,and$R” is$
willingto $pe itD’$,nottotakethe altruisticbehavior. Whenpoint$P(C, B)$fallsintheconflictregion,$D$and$R$
both wouldhave topaycosts if they pursuedthe conflict. Theconditionthat$D’s$inclusive fitnessvaluein the
caseof winningisgreaterthan it wouldbe in thecaseofavoidingthe conflict in the firstplace,givenas
inequality(4),can
oe
interpretedasbeingthat$Pl(C- kdR, B+dR)$,the pointobtainedbyshifting$P(C, B)$with$P2$$obtainedbyshiftingP(C,B)withvector(kdR,- dR),isstilllocatedabovelineB/C=vector$($C+kdR,B$-dR),thepoint
($- kdR,$dR),isstilll$\propto$$atedbelowlineB/C=l/r.ThesameconditionforR,givenasinequality(5),isthat$
$r$. As$dR$(theconflictcost)increases,the varying pointsPl andP2approachesthecritical lines$B/C=1/r$and
$B/C=r,$$respec\dot{0}vely$. IxtPDand$PR$,respectively, denote the$inters\infty tion\mu ints$thatPland P2meetwhen they
reachthose lines. Then,theconditionfor$D$tolose theconflictgamecan&statedthatPlreaches$PD$,while P2
Fig.2 Summary of the results for conflict resolution in
the.
$(C, B)$-space. Line$B/C=g(r, k)$divides theconflictregion intotwo sub-regions:theupperis the compromised altruism region, where$D$should withdraw ffom the conflict and take the$al\alpha uistic$behavior;and the lower is
the compromised non-altruism region, where$R$,onthecontrary,should withdrawffomthe
conflict and let$D$nottake the$altruis\dot{u}c$behavior. Notice that thislineconsistsof the
midpoints oftheline segments(withslope-l$/k$)definedbythe pairs ofintersectionpoints(PD andPR)indicated in Fig. 1. Theslopeofthe compromiseline,$g(r, k)$,decreasesas$k$increases
$(0\leq k\leq\cdot)$,andits rangeis confined betweentwobrokenlines(symmetrictoeach other with
respecttoline$B/C=g(r, 1)=1)$whoseslopesare $g(r, 0)=(r2+1)Qr$and$g(r, \cdot)=2r/(r2+$
$r$
Fig.3 The linesrepresentingthecritical conditions for the altruism evolution
representedasthe relations of$B/C$to$r$that Hamilton’s Rule predicts (thefirst
lme fromthetop),thenewtheory predicts for thecaseofnoeffective
manipulation by$R(kE0)$ (thesecond line fromthetop),itpredicts forthecase
ofnoeffectiveresistanceby$R(kE\cdot)$ (the second line from thebottom),and