原 著
遂行課題を事前認識している事が,課題開始肢位に与える影響
藁 科 孝 佑
1)国 宗 翔
1)川 﨑 純
2) 1)秋岡・西代医院
2)四條畷学園大学リハビリテーション学部
キーワード
バランス・開始肢位・COM・COP・軌跡長
要 旨
[目的]重心移動課題において,事前に重心移動方向を認識することにより,重心移動方向へ身体重心位置が 変位すると考えた.そこで重心移動方向の認識が,開始肢位の center of pressure(以下 COP)・center of mass (以下 COM)に与える影響を明らかにした. [方法]対象者を測定開始前に運動方向を指示する認識群(n=17)と,動作開始の合図と共に運動方向を指示 するランダム群(n=12)に分類した.測定には三次元動作解析装置と床反力計を用いた.動作開始前 20 秒 間の立位時の COP,COM,COP 軌跡長・COM 軌跡長を算出した. [結果]認識群において,COM は 20 秒間の立位時に重心移動方向へ変位していた(p<0.05)が,COP は両群 共に重心移動方向への変位はなかった.軌跡長は両群共に COM に比べ COP の方が長かった(p<0.05). [考察]COM を COP の変位により調整していることが示唆された.また重心移動課題では,運動方向を認識 していると事前に COM が変位するため,高い信頼性,再現性が得られないことが示唆された.【はじめに】
現在,65 歳以上の高齢者の総人口に占める割合(高齢 化率)は 23.1%と言われている1).また総人口が減少す る中で,高齢者が増加することにより高齢化率は上昇し, 平成 25 年には 25.2%,平成 47 年には 33.7%になるとも 言われている. 高齢者において,介護が必要となった主な原因の第 3 位が転倒・骨折であると報告されており2),高齢者の死 亡原因としても上位に位置している.転倒による骨折は 身体機能の低下,自立性の損失を起こし,高齢者の施設 入所の主要な原因となる.また,生命予後の悪化や医療 費の増大を引き起こすと言われている3).そのため高齢 者の転倒予防対策は今まで以上に必要になると考えられ る.ヒトは,自身の質量中心(center of mass:以下 COM) の投影点を支持基底面内に保持することで安定した姿勢 を確立できる.臨床で求めるバランス能力とは,COM の制御能力と解釈され,簡単には「身体を平衡状態に保持 する能力」と定義される4).また,臨床では functional
reach test5),timed up & go test6),Cross test7,8) などが動的バランスを評価する試験として知られている. 床反力計や重心動揺計を利用して COM,足圧中心 (center of pressure:以下 COP)の動揺面積や移動距離, 総軌跡長を測定する研究も多く,臨床でも簡便に用いら れている評価の一つである.しかし,COP の動揺の中心 は,遂行すべき課題によっても容易に変化する9)という ことが明らかになっており,単一の課題では COP の基 本位置が回数毎に変化することが予想される.さらに, ヒトの随意運動の背景には,無意識かつ自動的に行われ る姿勢の制御がある10).姿勢制御は,随意運動の前に行
わ れ る 仕 組 み (aAPAs : accompanying anticipatory postural adjustments)と,随意運動中に行われる仕組 み(pAPAs:preparatpry anticipatory postural adjust- ments)があると言われている11).
これらのことにより,課題を認識することで,COM と COP の位置が変化すると考えた.COM と COP の位 置が変化するのであれば,動作課題の重心移動方向が事 前に認識されているような評価法では,高い信頼性,再
現性が得られない.そこで我々は重心移動課題における 運動方向の認識の有無が,開始肢位の COM と COP に 与える影響を明らかとするために,動作開始前の COM と COP を算出し、それぞれの比較検討を行うこととし た.
【方 法】
対象は健常成人 29 名(年齢 20.9±1.6 歳,身長 1667.8 ±110.7 mm 体重 61.4±16.8 kg,足長 246.8±16.8 mm) とした.本研究について十分な説明を行い,同意の得ら れた者を被験者とした. 対象者には,Plug-in Gait マーカーセットに従い,全 身に赤外線反射マーカーを 39 点添付した(図 1).測定 開始前に運動方向を指示する認識群(n=17)と,動作 開始の合図と共に運動方向を指示するランダム群(n= 12)に分類した.開始肢位は,上肢を腹部の前に置き,足 幅を 20 cm とした.動作課題は 20 秒間の自然立位後,4 秒間で前方または後方へ最大重心移動を行い,その後 4 秒間で静止立位へ戻る動作とした(図 3).試行中は 60 Hz の リ ズ ム の 音 を メ ト ロ ノ ー ム ( KORG 社 製 : MERONOME MA-30)で鳴らし続け,前方,後方各 4 回の計 8 回行った. 計測には三次元動作解析装置 Vicon Nexus(Vicon Motion Systems社,MX-T40S 8 台,サンプリング周波 数:200 Hz)を用いた.床反力計(AMTI 社製,サンプ リング周波数:1000 Hz)2 枚を使用した.得られた自然 立位時(20 秒間)のデータから COP,COM,前後方向 の COP 軌跡長,前後方向の COM 軌跡長を算出した.COP, COMの軌跡長は 200 Hz で算出した.COM,COP の位 置は両外果の中点からの距離を足長で補正し,課題別に比 較する事とした.COM・COP 軌跡長は足長で補正し,足 長の平均で正規化した後,課題別に比較する事とした. 図 1 マーカー貼付位置(39 点) 両前頭部,両後頭部,両肩峰,両上腕外側,両外側上顆,両前腕外側,両手関節内側,両手関節外側,両第 2 中手骨 頭,胸骨柄,剣状突起,第 7 頸椎棘突起,第 10 胸椎棘突起,右肩甲骨,両上前腸骨棘,両上後腸骨棘,両大腿外側, 両膝関節外側,両下腿外側,両外果,両踵部,両第 2 中足骨頭図 2 開始肢位 上肢を腹部の前に置き,足幅を 20 ㎝とした.
【結 果】
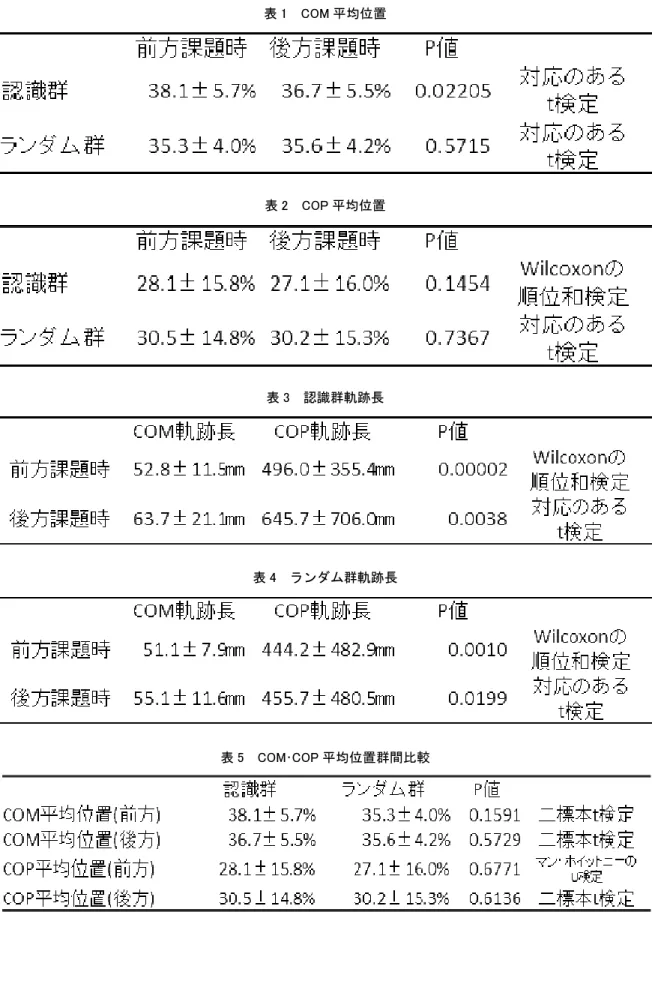
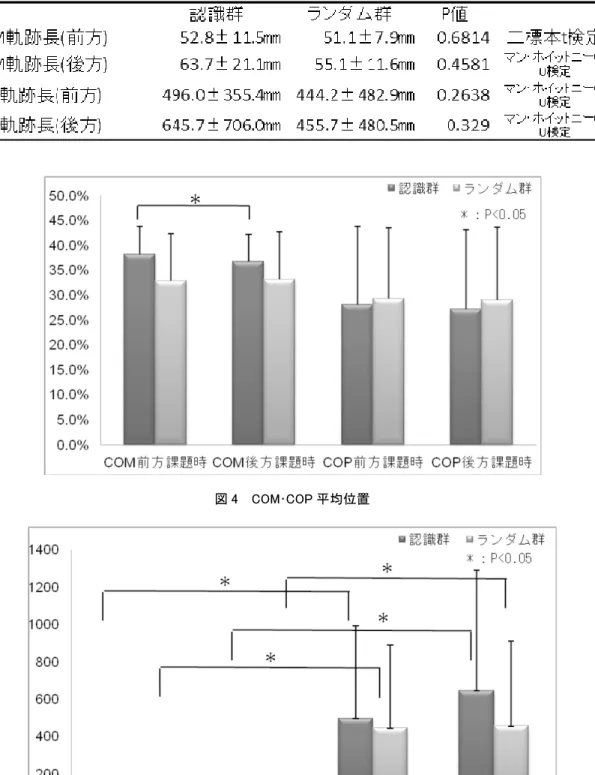
認識群では,前方課題時の COM 平均位置と,後方課 題時の COM 平均位置に有意な差を認めた(p<0.05)が, ランダム群では認めなかった(表 1).COP 平均位置に 関しては,認識群,ランダム群共に差を認めなかった(表 2).認識群では,前方移動時(p<0.001),後方移動時 (p<0.05)共に COM 軌跡長と COP 軌跡長に有意な差を 認めた(表 3).ランダム群でも同様に,前方移動時 (p<0.001),後方移動時(p<0.05)共に COM 軌跡長と COP軌跡長において有意な差を認めた(表 4).COM, COP における平均位置と軌跡長のそれぞれの群間比較 では有意な差を認めなかった(表 5.6). なお,各試行の比較には,Shapiro-Wilk 検定をそれぞ れ行い,対応のある t 検定または Wilcoxon の順位和検 定を用いた.群間比較には,Shapiro-Wilk 検定をそれぞ れ行い,二標本 t 検定またはマン・ホイットニーの U 検 定を用いた.有意水準は 5%とし,統計処理には R(2.8.1) を使用した.【考 察】
本研究は,健常成人を対象に,重心移動課題において 運動方向の認識の有無が,開始肢位の COM と COP に 与える影響を明らかにすることを目的として,それぞれ の比較・検討を行った. 図 3 動作課題 20 秒間の自然立位後,4 秒間で前方または後方へ最大重心移動を行い,その後 4 秒間で自然立位 へ戻る動作とした.表 1 COM 平均位置
表 2 COP 平均位置
表 3 認識群軌跡長
表 4 ランダム群軌跡長
表 6 COM・COP 軌跡長群間比較 図 4 COM・COP 平均位置 図 5 COM・COP 軌跡長 本研究より重心移動課題時に,開始前から移動方向を 認識している事で,静止立位時の COM が重心移動方向 へ予め変位しているという結果が得られた.これは,重心 移動という課題を認識することで,aAPAs の作用によっ て重心移動課題より前に,重心移動方向へ COM を変位 させていると考えた.重心移動方向を認識することで COM の変位を認めるのであれば,Functional Reach Test の様な開始肢位からの移動距離を測定する評価で
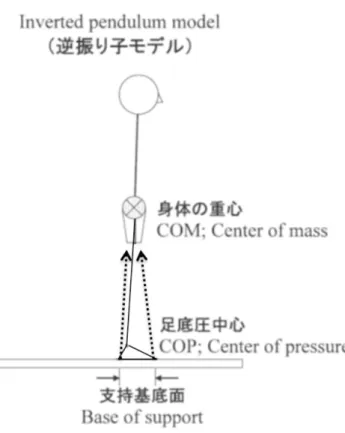
図 6 静止立位時の逆振り子モデル(長谷11)より引用一部改変)
安静姿勢では,COP に対する COM の位置により転倒する方向は決まるが,矢上面上 では COP を前後に移動させることにより,COM の位置を保持し,転倒を避けている. ankle strategy での制御では,重心の前後移動に伴う背屈・底屈が起こり,COP は背屈 の際には後方,底屈の際には前方に移動している. は,重心移動方向を認識している事で,高い信頼性,再 現性が得られないと考える.しかし,臨床現場で動的バ ランス評価を行う際は,患者に重心移動方向を認識させ ずに行うのは困難であり,転倒の危険を伴う.その為, 立位動的バランス評価を行う際には,Cross test の様な, 重心移動を行った全方向の最大値及び面積を測定するか, 開始肢位からの重心位置が影響しない評価法を用いるこ とが有用であるとことが示唆された. 長谷は,COP は COM に同期して変位する9)として いる.逆振り子モデルを考えた際,安静姿勢では,COP に対する COM の位置により転倒する方向は決まる(図 6).矢上面上では COP を前後に移動させることにより, COM の位置を保持し,転倒を避けている.また,立位 において,矢上面の姿勢制御は ankle strategy が担って いると Plamen らは述べている12).ankle strategy での
制御では,重心の前後移動に伴う背屈・底屈が起こる. これにより,COP は背屈の際には後方,底屈の際には前 方に移動させていると考えられる.この COP の前後移 動が COM の位置を調整しているため,認識群,ランダ ム群の COP 平均位置に差を認めなかったのだと考えた. 今回の研究では,運動方向の認識の有無が,開始肢位 の COM と COP に与える影響を明らかとした.しかし, COMと COP の継時的な変化や関節角度,筋活動につい ての検討を行っていない.これらを同時に測定していく ことで,より信頼性,再現性の高い動的バランス評価法 を検討できると考える.
【ま と め】
健常成人 29 名において,重心移動課題における運動方 向の認識の有無が,開始肢位の COM と COP に与える 影響について検討した. 事前に重心移動方向を認識していることで,重心移動 方向へ COM が変位していることが明らかとなった.そ のため,立位動的バランス評価を行う際には,重心移動を行った全方向の最大値及び面積を測定するか,開始肢 位からの重心位置が影響しない評価法を用いることが有 用であるとことが示唆された. また,COP の変位により COM の位置は調整されてい ることが示唆された.
【引用文献】
1)平成 23 年版高齢社会白書 高齢化の状況及び高齢 社会対策の実施状況に関する年次報告.第 1 章,第 1 節,1,高齢化の状況 2)厚生労働大臣官房統計情報部編.平成 19 年国民生 活調査.厚生統計協会 3)奈良 勲 鎌倉矩子 監修.標準理学療法学・作業 療法学 老年学 第 2 版.93-94 4)柊 幸伸:支持基底面積と重心移動域の実測とその 比較.理学療法科学,23(2):229‐234, 2008 5)Duncan PW, Weiner DK, Chandler J:Functi-onal reach: a new clinical measure of balance. Journal of Gerontology, 45(6):M192-7,1990 6)Podsiadlo D, Richardson S:The timed "Up &
Go":a test of basic functional mobility for frail elderly persons. Journal of the American Geriatrics Society, 39(2):142-148, 1991 7)福山勝彦,丸山仁司:Cross Test と他のバランス検 査との関係.理学療法科学,25(1):79-83, 2010 8)石川 朗,武藤美穂子 他:平衡機能検査を目的とし た Cross test の有効性.理学療法科学,21(3):186-194, 1994 9)長谷公隆:立位姿勢の制御.リハビリテーション医 学,43,542-553,2006 10)高草木薫:姿勢筋緊張の調整と運動機能.Clinical neuroscience,28,733-737,2010
11)B Schepens, et al.:Independent and convergent signals from the pontomedullary reticular forma- tion contribute to the control of posture and movement during reaching in the cat. Journal of neurophysiology,92:2217-2238,2004
12)Plamen G, et al.:Feedforward ankle strategy of balance during quiet stance in adults. Journal of Physiology,514:915-928,1999
Knowing beforehand the task that subjects will do, it affects their
posture at starting task.
Warashina Kosuke
1)Kunimune Sho
1)Kawasaki jun
2)1)
Akioka Nishindai hospital
2)
Shijonawate gakuen university, Faculty of rehabilitation
Key words
balance
・natural standing posture・COM・COP・track length
Abstruct
[Objective] It was thought that the center of mass (: COM) will change in advance when evaluating the movement of the COM of the operation if people had been commanded the direction before the movement. If this hypothesis was defined the current appraisal method would not be able to obtain high reliability and reproducibility because people have been already known the direction of movement. So the purpose of this study was to clarify the effect on COM and the center of pressure (: COP) by presence or absence of recognition of the direction of movement.
[Methods] Subjects were classified into two groups. “Recognized group” was instructed direction of movement in advance (n=17), and “Randomized group” indicated the direction of movement at the same time of the operation (n=12). Subjects stood twenty seconds and they continuously carried out the movement of the COM. Force plate and three-dimensional motion analysis systems were used for this study. Then, their COP in natural standing posture was measured. Their COM, COP and their track length in natural standing posture were calculated and evaluated. The obtained data were compared between each trial.
[Result] The results of this study were that the position of COM of “Recognized group” had been displaced the direction of movement in advance when they were natural standing posture (p<0.05). However, the position of COP didn’t have significant difference between both groups. Besides, the track length of COP was longer than that of COM in both groups (p<0.05).
[Discussion] Therefore, their natural standing posture changed by the task.
In addition, It suggested that the movement of COP controlled the position of COM. by the above, knowing it in advance doesn't give completely confidence and repeatability.