抵抗ネットワーク型
近接覚センサアレイの研究開発
長 谷 川 浩 章
電 気 通 信 大 学 大 学 院 情 報 理 工 学 研 究 科 博 士( 工 学 )の 学 位 申 請 論 文
2013 年 3 月
近接覚センサアレイの研究開発
博士論文審査委員会
主査 : 下条 誠 教授
委員 : 木田 隆 教授
委員 : 金子 正秀 教授
委員 : 明 愛国 准教授
委員 : 長井 隆行 准教授
著作権所有者
長谷川 浩章
2013
Hiroaki Hasegawa Abstract
In this dissertation, a net-structured, high-speed proximity sensor array designed to facilitate safe and rapid robot activity is presented. For robots, high-speed detection of nearby and non-contact objects is important because of the reduced time-to-contact periods.
In order to achieve an appropriate sensing speed, we propose a net-structure proximity sensor system (NSPS) that is capable of covering a large sensing area and which achieves a 1-millisecond response time. The NSPS system consists of an array of infrared reflec- tive proximity sensors that have been efficiently integrated by resistor network circuitry.
These sensors require only six external wires and three output signals to detect the cen- ter position of, and the approximate distance to, an object regardless of the number of detecting elements.
The dissertation consists of five parts and nine chapters. The first part addressed the problems of sensing system for autonomous robots. The common combination of vision, force and tactile sensors sometimes misses the object close to but noncontact of the robot, and shorter time-to-contact makes the high-speed detection of the existence of the nearby objects important. The second part, we introduced the structure and principle of Network- Structured Proximity Sensor Array (NSPS). Next we verified the response characteristics of the system was verified by testing a 5×5 NSPS prototype and demonstrated the applications for human interface and robotics utilizing its response speed. The third part, we proposed several improvements for NSPS; the relative measurement between two total current outputs that enables distance measurement method independent of the reflectance and shape of the objects, PIN photodiode based sensor array for microsecond response and spread-spectrum based multi-sensor coexistence. The fourth part, the application for
multifingered robot hand. In this part, we fabricated the NSPS to cover the fingertips and the palm of three-fingered robot hand, and then implemented simple proportional- integral control law using distance and x-y position output of the NSPS that runs every millisecond. The robot hand achieved the tracking and capturing motion of the objects in translational motion at 500 mm/s velocity. The last part we present the conclusion and future works.
長 谷 川 浩 章
概 要
本 研 究 で は ,赤 外 線 反 射 型 近 接 覚 セ ン サ の 効 率 的 な 出 力 統 合 を 実 現 す る 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ を 提 案 し ,実 用 的 な セ ン サ シ ス テ ム の た め の 要 素 技 術 開 発 と ,セ ン サ フィー ド バック に 基 づ い た 実 ロ ボット シ ス テ ム の 応 答 向 上 に よ り,そ の 有 効 性 の 確 認 に 取 組 ん だ .
本 論 文 は 全9章 か ら 構 成 さ れ ,そ の 内 容 の 要 旨 は 以 下 の 通 り で あ る . 第1章 序 論
第1章 で は ,自 律 ロ ボット の 制 御 に お け る 近 接 覚 セ ン サ の 重 要 性 に つ い て 論 じ る .ま た ,関 連 す る 先 行 研 究 に つ い て 紹 介 し ,そ れ ら の 問 題 点 に つ い て 整 理 し た 後 ,提 案 す る セ ン サ シ ス テ ム の 位 置 づ け と 研 究 目 的 を 述 べ る .
第2章 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 動 作 原 理
第2章 で は ,近 接 覚 セ ン シ ン グ に お け る 大 面 積 化・多 数 検 出 点 の 統 合 に お け る 既 存 手 法 の 問 題 点 で あ る 配 線 数 と 計 測 時 間 の 増 大 を 踏 ま え , 抵 抗 ネッ ト ワ ー ク 型 近 接 覚 セ ン サ ア レ イ を 提 案 し た .本 セ ン サ は 赤 外 線 反 射 量 を 電 流 と し て 出 力 す る フォト リ フ レ ク タ を ア レ イ 化 し ,そ の 出 力 電 流 か ら 格 子 状 の 抵 抗 素 子 ネット ワ ー ク を 用 い て ,総 和 お よ び 一 次 モ ー メ ン ト を 演 算 す る 事 が 可 能 で あ る .そ の 基 礎 と な る 抵 抗 回 路 網 の 動 作 に つ い て モ デ ル 化 を 行 い ,フォト リ フ レ ク タ の 特 性 と 回 路 方 程 式 を も と に ,物 体 の3次 元 位 置 を 回 路4端 の 電 圧 か ら 求 め る こ と が 可 能 で あ る こ と を 示 し た .
第3章 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 基 礎 特 性 の 確 認
第3章 で は ,前 章 で 論 じ た 動 作 原 理 に 基 づ く5×5セ ン サ ア レ イ を 試 作 し , そ の 設 計 上 の 留 意 点 に つ い て 述 べ た .さ ら に 試 作 し た セ ン サ ア レ イ の 基 礎 的 な 性 能 評 価 と し て ,位 置 出 力 ,距 離 出 力 特 性 ,お よ び 過 渡 応 答 特 性 と 移 動 物 体 へ の 追 従 性 能 を 確 認 し た .そ の 結 果 ,セ ン サ 面 か ら50[mm]以 内 で は
実 用 的 な 出 力 が 得 ら れ る こ と ,1[ms]以 内 の 高 速 な 応 答 速 度 が 実 現 で き て い る こ と を 確 認 し た .こ れ ら の 評 価 を 通 じ ,ロ ボット 制 御 に お い て 十 分 な 応 答 特 性 が 達 成 で き た こ と を 確 認 し た .
第4章 抵 抗 ネット ワ ー ク の 派 生 形 態
第4章 で は ,応 用 上 の 要 求 に 基 づ く 抵 抗 ネット ワ ー ク の 変 形 例 を と り あ げ た .第2章 の 基 本 回 路 網 を 基 礎 と し て ,後 述 す る2種 類 の 変 形 を 行 い そ の 動 作 に つ い て 解 析 し た .( 1 )抵 抗 ネット ワ ー ク 内 の 部 品 数 削 減 を 目 的 と し た 簡 易 型 抵 抗 ネット ワ ー ク:基 本 型 回 路 網 で 大 規 模 な セ ン サ ア レ イ を 校 正 し た 場 合 に 生 じ る ,素 子 数 に 比 例 し た 抵 抗 素 子 数 の 増 加 を 緩 和 で き る 回 路 構 成 を 考 案 し た . ( 2 )柱 状 物 体 側 面 を 継 ぎ 目 な く 覆 い ,360度 全 周 の 検 出 を 実 現 す る 全 方 位 近 接 覚 セ ン サ:移 動 ロ ボット の 全 周 を 覆 い ,全 方 向 か ら の 物 体 接 近 を 検 知 で き る リ ン グ 状 セ ン サ を 考 案 し た .こ れ は ,円 筒 側 面 を 覆 う 検 出 素 子 を ,抵 抗 回 路 網 の4辺 に 割 り 当 て ,xy軸 の 位 置 出 力 で 物 体 位 置 を 表 す る こ と に よ り,360度 全 方 位 か ら の 物 体 接 近 の 検 知 が 可 能 と なった .
第5章 物 体 反 射 率・寸 法 に 依 存 し な い 距 離 計 測 法
第5章 で は ,光 電 流 総 和 の 相 対 値 計 測 に よ り 検 出 物 形 状・反 射 特 性 の セ ン サ 距 離 出 力 へ の 影 響 を 軽 減 す る 補 償 手 法 を 提 案 し た .本 近 接 覚 セ ン サ ア レ イ は 検 出 素 子 群 の 光 電 流 に つ い て 総 和 を 出 力 す る こ と か ら ,単 体 で は 距 離 検 出 特 性 の 物 体 依 存 性 が 大 き い と い う 問 題 を 抱 え て い た .こ の 問 題 に 対 し , 検 出 素 子 の 光 軸 方 向 に 光 路 差 を 付 け た 近 接 覚 セ ン サ ア レ イ を 設 け,両 者 の 検 出 電 流 比 に 着 目 す る こ と で ,検 出 対 象 物 の サ イ ズ と 反 射 率 の 影 響 を 軽 減 で き る こ と を 実 験 に よ り 示 し た .
第6章 フォト ダ イ オ ー ド 受 光 型 へ の 拡 張
第6章 で は ,さ ら な る 高 速 化 と フォト ト ラ ン ジ ス タ 以 外 の 検 出 素 子 へ の 応 用 性 を 確 認 す る た め ,受 光 素 子 と し てPIN型 フォト ダ イ オ ー ド を 用 い た 検 出 回 路 を 開 発 し た .こ こ ま で 使 用 し た 抵 抗 回 路 網 を 基 礎 と し て ,マ イ ク ロ ア ン ペ ア オ ー ダ ー の 微 少 電 流 増 幅 を 行 う た め ,ト ラ ン ス イ ン ピ ー ダ ン ス 回 路 を 応 用 す る .ト ラ ン ス イ ン ピ ー ダ ン ス 回 路 の 動 作 を 想 定 し 回 路 端 末 条 件 を 変 更 し た 変 形 例 に つ い て 解 析 を 行った .ま たAC特 性 に つ い て も モ デ ル 化 を 行った 上 で 検 出 回 路 を 設 計 し ,そ の 応 答 特 性 と ,高 速 な 移 動 物 体(HDDス ピ
第7章 多 セ ン サ 共 存 を 考 慮 し た 変 調 方 式
第7章 で は ,複 数 ロ ボット で の 近 接 覚 セ ン サ ア レ イ 使 用 を 考 慮 し た 変 調 方 式 の 検 討 を 行った .フォト ダ イ オ ー ド 受 光 型 セ ン サ ア レ イ に よ り 得 ら れ た 帯 域 幅 を 活 用 し ,ス ペ ク ト ラ ム 拡 散 変 調 を 応 用 し た 駆 動 / 信 号 処 理 方 式 を 用 い る こ と で ,セ ン サ シ ス テ ム 間 で の 協 調 が 不 要 な 複 数 セ ン サ 共 存 が 可 能 で あ る こ と を シ ミュレ ー ション お よ び 実 機 信 号 の 処 理 に よ り 示 し た .
第8章 ロ ボット ハ ン ド へ の 応 用
第8章 で は ,抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 持 つ 応 答 性 能 を 活 用 し た ロ ボット ハ ン ド シ ス テ ム に つ い て 述 べ た .視 覚 セ ン サ に お い て オ ク ル ー ジョン が 顕 著 と な る 物 体 表 面 か ら 数 十mmの 至 近 距 離 で ,リ ア ル タ イ ム に 物 体 位 置 情 報 を 得 る こ と の で き る 当 セ ン サ を 利 用 し た ハ ン ド シ ス テ ム を 構 築 し た .手 掌 お よ び 三 指 の 指 先 部 を 覆 う 近 接 覚 セ ン サ ア レ イ に よ り,リ ア ル タ イ ム で の 手 先 位 置 お よ び 指 先 距 離 の 制 御 に よ る ア プ ロ ー チ・把 持 動 作 を 実 装 し ,500[mm/s]の 直 線 移 動 物 体 に 対 す る 追 従・捕 獲 を 達 成 し た .
第9章 結 論
第9章 で は ,当 研 究 の 成 果・結 論 を ま と め た 上 で ,今 後 の 課 題 と 展 望 に つ い て 述 べ る .
i
目 次
1 序 論 1
1.1 ロ ボット に お け る 外 界 セ ン シ ン グ . . . . 1
1.2 従 来 研 究 . . . . 1
1.3 当 研 究 の 目 的 . . . . 7
1.4 本 論 文 の 構 成 . . . . 8
2 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 動 作 原 理 11 2.1 概 要 . . . . 11
2.2 セ ン サ の 構 造 と 動 作 原 理 . . . . 12
2.2.1 検 出 素 子 の 座 標 系 . . . . 14
2.2.2 検 出 素 子 周 辺 の 回 路 と 基 礎 方 程 式 . . . . 15
2.2.3 抵 抗 ネット ワ ー ク の 境 界 条 件 . . . . 16
2.2.4 光 電 流 の 1 次 モ ー メ ン ト . . . . 16
2.2.5 総 電 流 と 重 心 位 置 . . . . 18
2.3 セ ン サ 出 力 の 解 釈 . . . . 19
2.3.1 光 電 流 分 布 と 1 次 モ ー メ ン ト の 関 係 . . . . 19
2.3.2 例 1:平 坦 な 円 盤 . . . . 20
2.3.3 例 2:球 体 . . . . 21
2.3.4 例 3:傾 斜 し た 平 板 . . . . 22
2.4 ま と め . . . . 23
3 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 基 礎 特 性 25 3.1 概 要 . . . . 25
3.2 試 作 セ ン サ の 設 計 . . . . 25
3.2.1 フォト リ フ レ ク タ の 検 出 特 性 . . . . 25
3.2.2 検 出 素 子 の 配 置 . . . . 26
3.2.3 抵 抗 ネット ワ ー ク の 定 数 設 計 . . . . 28
3.2.4 演 算 回 路 . . . . 28
3.3 検 出 性 能 の 評 価 . . . . 30
3.3.1 1次 モ ー メ ン ト 出 力 の 確 認. . . . 30
3.3.2 位 置 検 出 特 性 . . . . 31
3.3.3 距 離 検 出 特 性 . . . . 32
3.3.4 過 渡 応 答 特 性 . . . . 33
3.4 考 察 . . . . 34
3.5 ま と め . . . . 40
4 抵 抗 ネット ワ ー ク の 派 生 形 態 41 4.1 概 要 . . . . 41
4.2 簡 略 型 回 路 網 . . . . 41
4.2.1 簡 略 型 ネット 状 近 接 覚 セ ン サ の 構 造 . . . . 41
4.2.2 簡 略 型 回 路 の 測 定 原 理 . . . . 42
4.3 中 空・全 方 位 セ ン サ . . . . 48
4.3.1 方 位 角 の 導 出 方 法 . . . . 50
4.3.2 回 路 構 造 . . . . 52
4.3.3 モ ジュー ル 化 . . . . 54
4.3.4 電 流 分 布 の 中 心 位 置 と 総 電 流 の 導 出 . . . . 55
4.4 ま と め . . . . 62
5 物 体 反 射 率・寸 法 に 依 存 し な い 距 離 計 測 法 65 5.1 概 要 . . . . 65
5.2 提 案 セ ン サ の 構 成 . . . . 67
5.3 検 出 特 性 評 価 . . . . 68
5.4 ま と め . . . . 71
6 フォト ダ イ オ ー ド 受 光 型 へ の 拡 張 73 6.1 概 要 . . . . 73
iii
6.2 フォト ダ イ オ ー ド 受 光 型 近 接 覚 セ ン サ ア レ イ. . . . 73
6.2.1 動 作 原 理 . . . . 74
6.2.2 実 装 を 考 慮 し た 抵 抗 回 路 ト ポ ロ ジ の 選 択 . . . . 77
6.3 設 計 検 討 . . . . 78
6.3.1 初 段 用OPア ン プ の 選 定 . . . . 78
6.3.2 LED点 灯 制 御 部. . . . 78
6.3.3 SPICEシ ミュレ ー ション . . . . 79
6.3.4 試 作 セ ン サ . . . . 79
6.4 評 価 試 験 . . . . 85
6.4.1 位 置・距 離 応 答 特 性 . . . . 85
6.4.2 立 ち 上 が り 特 性 . . . . 86
6.4.3 移 動 物 体 追 従 特 性 . . . . 87
6.5 ま と め . . . . 89
7 多 セ ン サ 共 存 を 考 慮 し た 変 調 方 式 91 7.1 概 要 . . . . 91
7.2 ス ペ ク ト ラ ム 拡 散 の 原 理 . . . . 92
7.2.1 直 接 拡 散 . . . . 93
7.2.2 拡 散 符 号 . . . . 94
7.3 近 接 覚 セ ン サ へ の 適 用 検 討 . . . . 97
7.3.1 シ ミュレ ー ション に よ る 動 作 検 討 . . . . 98
7.4 実 機 信 号 を 使 用 し た 信 号 処 理 系 の 構 築. . . . 98
7.4.1 セ ン サ ハ ー ド ウェア . . . . 98
7.4.2 計 測・信 号 処 理 プ ロ グ ラ ム . . . . 102
7.5 外 乱 光 へ の 耐 性 . . . . 103
7.5.1 低 周 波 外 乱 光 . . . . 103
7.5.2 変 調 光 . . . . 103
7.6 複 数 セ ン サ の 共 存 . . . . 105
7.7 ま と め . . . . 106
8 ロ ボット ハ ン ド へ の 応 用 111
8.1 背 景 . . . . 111
8.2 セ ン サ 搭 載 指 先 の 設 計 と 試 作 . . . . 113
8.2.1 指 先 用 セ ン サ の 設 計 . . . . 113
8.2.2 触 覚・近 接 覚 セ ン サ 搭 載 指 . . . . 114
8.2.3 指 先 セ ン サ の 基 礎 検 出 特 性 . . . . 115
8.3 ロ ボット ハ ン ド シ ス テ ム . . . . 117
8.4 移 動 物 体 捕 獲 動 作 . . . . 118
8.4.1 手 首 位 置 の 調 整 . . . . 120
8.4.2 指 先 距 離 の 調 整 . . . . 121
8.4.3 3指 で の ア プ ロ ー チ 動 作 . . . . 123
8.4.4 接 触 相 で の 制 御 . . . . 123
8.5 実 験 結 果 . . . . 126
8.6 考 察 . . . . 126
8.6.1 手 首 位 置 制 御 . . . . 126
8.6.2 指 先 距 離 制 御 . . . . 127
8.6.3 ア プ ロ ー チ 動 作 . . . . 130
8.6.4 接 触 相 . . . . 131
8.7 ま と め . . . . 131
9 結 論 133 9.1 本 研 究 の ま と め . . . . 133
9.2 今 後 の 課 題 . . . . 135
9.2.1 各 種 要 素 技 術 を 統 合 し た 実 機 シ ス テ ム の 開 発 . . . . 135
9.2.2 視 覚 セ ン サ と の セ ン サ フュー ジョン . . . . 136
9.2.3 動 作 計 画 ア ル ゴ リ ズ ム と の 統 合 . . . . 136
謝 辞 137
参 考 文 献 139
v
A 近 接 覚 セ ン サ ア レ イ へ の レ イ ト レ ー シ ン グ 法 の 適 用 145
A.1 ネット 状 近 接 覚 セ ン サ の 設 計 . . . . 145
A.2 レ イ ト レ ー シ ン グ 法 . . . . 148
A.2.1 光 線 追 跡 法 の 画 像 合 成 分 野 で の 利 用 . . . . 149
A.3 フォト セ ン サ ア レ ー 構 造 に 対 す る レ イ ト レ ー シ ン グ 法 の 適 用 . . 150
A.3.1 光 線 の 追 跡 方 向 に 関 し て . . . . 150
A.3.2 ネット 状 近 接 覚 セ ン サ 出 力 の 算 出 方 法 . . . . 151
A.3.3 レ イ ト レ ー シ ン グ の 流 れ . . . . 151
A.4 シ ミュレ ー ション モ デ ル . . . . 151
A.4.1 投 受 光 部 の シ ミュレ ー ション モ デ ル . . . . 157
A.4.2 反 射 の シ ミュレ ー ション モ デ ル . . . . 161
A.4.3 シ ミュレ ー ション 精 度 に 関 し て . . . . 165
B 対 象 物 面 姿 勢 検 出 に 適 し た ロ ボット ハ ン ド 指 先 セ ン サ の 設 計 167 B.1 ロ ボット ハ ン ド 指 先 の ネット 状 近 接 覚 セ ン サ . . . . 167
B.1.1 対 象 物 面 の 傾 き と 光 電 流 分 布 の 中 心 位 置 の 関 係 . . . . 167
B.1.2 姿 勢 出 力 を 利 用 し た ハ ン ド 指 先 姿 勢 制 御 . . . . 169
B.2 指 先 セ ン サ の 設 計 検 討 課 題 . . . . 169
B.3 設 計 検 討 の 流 れ . . . . 171
B.4 光 学 素 子 配 置・指 向 性 に 関 す る 検 討 . . . . 171
B.4.1 素 子 指 向 性 が セ ン サ 姿 勢 出 力 特 性 に 与 え る 影 響 の 検 討 . . 171
B.4.2 フォト リ フ レ ク タ 単 素 子 の 距 離 出 力 特 性 シ ミュレ ー ション 175 B.4.3 素 子 数 と 姿 勢 出 力 特 性 に 関 す る 検 討 . . . . 178
B.4.4 ま と め . . . . 179
B.5 新 規 ハ ン ド 指 先 セ ン サ の 設 計 . . . . 180
B.5.1 素 子 傾 斜 角 度δの 検 討. . . . 181
B.5.2 ハ ン ド 指 先 長 軸 方 向 素 子 数 の 検 討 . . . . 185
B.5.3 フォト リ フ レ ク タ 並 列 接 続 に 関 す る 検 討 . . . . 186
B.6 製 作 し た 指 先 . . . . 186
B.7 シ ミュレ ー ション 検 証 実 験 . . . . 187
B.7.1 実 験 方 法 . . . . 187
B.7.2 実 験 結 果 . . . . 192
B.7.3 従 来 の 指 先 セ ン サ と の 比 較 . . . . 194
B.8 ま と め . . . . 196
vii
図 目 次
1.1 近 接 覚 セ ン サ ベ ー ス ト 制 御 の 概 念 図 . . . . 2
1.2 Johnstonに よ る 光 学 式 近 接 覚 セ ン サ [1] . . . . 3
1.3 Bonenに よ る 光 学 式 近 接 覚 セ ン サ[2] . . . . 3
1.4 Balek ら に よ る グ リッパ 搭 載 型 近 接 覚 セ ン サ[3] . . . . 3
1.5 “RI-MAN”に 搭 載 さ れ た 8x8 マ ト リ ク ス 型 近 接 覚 セ ン サ [4, 5] . . . . 4
1.6 Leeら に よ る 近 接・触 覚 複 合 型 セ ン サ [6] . . . . 5
1.7 Kimら に よ るµ-ILED arrays [7] . . . . 6
1.8 大 村 ら の“切 り 貼 り 触 覚 セ ン サ” [8] . . . . 6
1.9 高 速 多 指 ロ ボット ハ ン ド を 用 い た す べ り 検 出 に 基 づ く 把 持 力 調 節 [9] . . . . 8
1.10 本 論 文 の 構 成 と 研 究 課 題 と の 関 連 . . . . 9
2.1 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 構 造 . . . . 12
2.2 検 出 素 子 の 座 標 と 抵 抗 ネット ワ ー ク の 境 界 条 件 . . . . 13
2.3 検 出 素 子( フォト ト ラ ン ジ ス タ )近 傍 の 等 価 回 路 . . . . 14
2.4 セ ン サ 位 置 出 力 と 物 体 位 置 の 関 係 . . . . 19
2.5 位 置 出 力 xo と 平 面 の 傾 き の 関 係 . . . . 22
3.1 試 作 し た 5×5素 子 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ . . . 27
3.2 RPR-220に お け る ピ ー ク コ レ ク タ 電 流 の 個 体 差 分 布(1000素 子, LED順 電 流If = 40 [mA] ) . . . . 27
3.3 演 算 回 路 の 構 成 . . . . 29
3.4 基 礎 検 出 特 性 評 価 に も ち い た 試 験 装 置. . . . 29
3.5 対 角2素 子 反 応 に よ る 電 流 一 次 モ ー メ ン ト 出 力 機 能 の 確 認 . . . . 31
3.6 各 検 出 点 直 上 で の 位 置 出 力 応 答 特 性 . . . . 32
3.7 距 離 出 力 特 性 . . . . 33
3.8 LED点 灯・消 灯 時 に お け るIall 過 渡 応 答 特 性 . . . . 35
3.9 ヒュー マ ン イ ン タ ー フェー ス と し て の 使 用 例 と 三 次 元 軌 道 の 出 力 36 3.10 移 動 物 体 追 従 実 験 の 様 子 . . . . 37
3.11 1000 mm/sで 移 動 す る 物 体 の 軌 跡xc(t)と セ ン サ 位 置 出 力xo(t)の 比 較 . . . . 38
4.1 簡 略 型 ネット 状 近 接 覚 セ ン サ の 構 造 . . . . 42
4.2 簡 略 型 近 接 覚 セ ン サ 座 標 系 . . . . 43
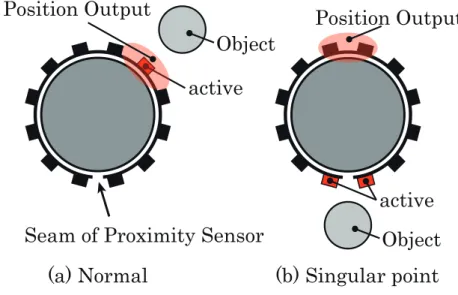
4.3 セ ン サ を 円 筒 に 巻 き 付 け る よ う に 実 装 し た 場 合 に 発 生 す る 継 ぎ 目 . . . . 49
4.4 物 体 に よ る 位 置 出 力(a) 特 異 点 以 外 / (b) 特 異 点 付 近 . . . . 49
4.5 全 方 位 ネット 状 近 接 覚 セ ン サ . . . . 51
4.6 セ ン サ の 実 装 方 法 . . . . 51
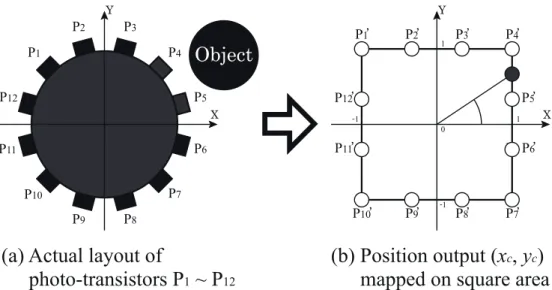
4.7 検 出 素 子 の 円 筒 配 置 と 位 置 出 力 の 関 係. . . . 53
4.8 位 置 出 力 (xc, yc)か ら 方 位 角 出 力ϕへ の 変 換 . . . . 53
4.9 中 心 部 の 内 部 配 線 を 省 略 し た セ ン サ 回 路 . . . . 55
4.10 回 路 の モ ジュー ル 化 . . . . 56
4.11 セ ン サ 座 標 系 . . . . 57
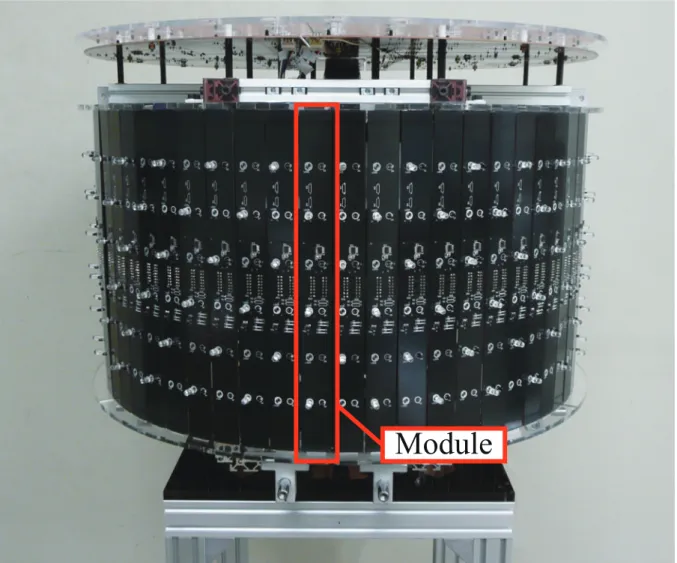
4.12 移 動 ロ ボット 用 全 方 位 近 接 覚 セ ン サ の 外 観 . . . . 63
5.1 距 離 オ フ セット を 使 用 し た 反 射 率 補 償 の 原 理. . . . 66
5.2 距 離 出 力 の 物 体 反 射 率 依 存 性 . . . . 66
5.3 提 案 す る 二 層 化 近 接 覚 セ ン サ の 外 観 . . . . 67
5.4 提 案 手 法 に よ る 処 理 前 の 総 電 流 出 力 . . . . 69
5.5 距 離 に よ る 電 流 比 の 変 化( 反 射 率 が 異 な る 場 合 ) . . . . 69
5.6 距 離 に よ る 電 流 比 の 変 化( 物 体 形 状・寸 法 が 異 な る 場 合 ) . . . . 70
5.7 各 種 対 象 物 に 対 す る 距 離 推 定 結 果 の 比 較 . . . . 70
6.1 フォト ダ イ オ ー ド 型 ネット 状 近 接 覚 セ ン サ. . . . 74
6.2 ト ラ ン ス イ ン ピ ー ダ ン ス 回 路 に よ る 電 流 / 電 圧 変 換. . . . 75
ix
6.3 応 答 特 性 シ ミュレ ー ション モ デ ル (Sheet 1/2) . . . . 80
6.4 応 答 特 性 シ ミュレ ー ション モ デ ル (Sheet 2/2) . . . . 81
6.5 ス テップ 応 答 シ ミュレ ー ション . . . . 82
6.6 試 作 セ ン サ 外 観 . . . . 82
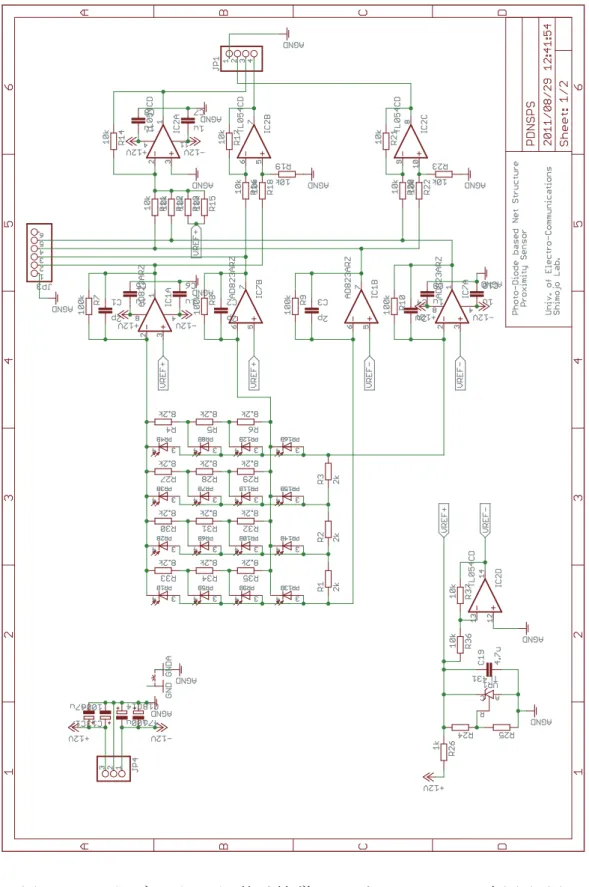
6.7 フォト ダ イ オ ー ド 型 近 接 覚 セ ン サ ア レ イ の 回 路 図 (1/2) . . . . 83
6.8 フォト ダ イ オ ー ド 型 近 接 覚 セ ン サ ア レ イ の 回 路 図 (2/2) . . . . 84
6.9 距 離・位 置 出 力 特 性 . . . . 85
6.10 位 置 出 力 特 性 . . . . 86
6.11 試 作 セ ン サ ア レ イ に お け るLED駆 動 パ ル ス 入 力 応 答 . . . . 87
6.12 移 動 物 体 追 従 特 性( 各 出 力 の 時 間 変 化 ) . . . . 88
6.13 移 動 物 体 追 従 特 性( 物 体 軌 道 ) . . . . 88
7.1 直 接 拡 散 型 通 信 機 の 構 成 . . . . 93
7.2 n次 のM系 列 発 生 回 路. . . . 94
7.3 Gold符 号 発 生 器. . . . 97
7.4 セ ン サ 二 系 統 共 存 時 の シ ミュレ ー ション モ デ ル. . . . 99
7.5 シ ミュレ ー ション 結 果:2セ ン サ 共 存 時・直 接 光 の 入 射 を 想 定 . . . 100
7.6 フォト ダ イ オ ー ド 型 近 接 覚 セ ン サ ア レ イ( ス ペ ク ト ラ ム 拡 散 変 調 対 応 化 改 造 後 ) . . . . 102
7.7 直 接 ス ペ ク ト ラ ム 拡 散 実 験 用VIの 全 体 図 . . . . 104
7.8 外 乱 光 耐 性 の 確 認(20W白 熱 電 球 外 乱 ) . . . . 105
7.9 動 作 波 形(20W白 熱 電 球 外 乱 ) . . . . 106
7.10 TOF式 距 離 画 像 セ ン サ に よ る 外 乱 光 耐 性 の 確 認. . . . 107
7.11 TOFセ ン サ 外 乱 下 で の 近 接 覚 セ ン サ の 動 作 波 形. . . . 107
7.12 外 乱 光 源(TOFセ ン サ 変 調 光 )の 距 離 に よ る 近 接 覚 セ ン サ 出 力 に お け るSNRの 変 化 . . . . 108
7.13 近 接 覚 セ ン サ2系 統 同 時 動 作 の 様 子 . . . . 108
7.14 セ ン サ 間 距 離50mm時 の セ ン サ 動 作 波 形 . . . . 109
8.1 把 持 動 作 に お け る 近 接 覚 セ ン シ ン グ の 位 置 づ け. . . . 112
8.2 試 作 し た 触 覚・近 接 覚 セ ン サ 搭 載 指 の 外 観 . . . . 114
8.3 距 離 検 出 特 性 . . . . 116
8.4 位 置 検 出 特 性 . . . . 116
8.5 多 指 ロ ボット ハ ン ド シ ス テ ム の 構 成 . . . . 118
8.6 3指8自 由 度 ロ ボット ハ ン ド と 各 セ ン サ の 搭 載 位 置 . . . . 119
8.7 補 正 後 の 総 電 流–距 離 特 性 . . . . 122
8.8 指 先–物 体 表 面 間 距 離 制 御 動 作 の 様 子 . . . . 124
8.9 セ ン サ 出 力 と 指 先 水 平 方 向 変 位 の 変 化. . . . 125
8.10 追 従・捕 獲 動 作 中 の 指 先 近 接 覚 セ ン サ の 出 力 変 化( 各 指 に お け る 距 離 推 定 値 ) . . . . 127
8.11 追 従・捕 獲 動 作 中 に お け る 触 覚 セ ン サ 出 力 の 時 間 変 化. . . . 128
8.12 追 従・捕 獲 動 作 の 流 れ . . . . 129
A.1 反 射 光 分 布 の 中 心 位 置 の 解 釈 . . . . 146
A.2 反 射 光 分 布-対 象 物 距 離 . . . . 146
A.3 ネット 状 近 接 覚 セ ン サ の 設 計 パ ラ メ ー タ. . . . 147
A.4 画 像 合 成 に お け る レ イ ト レ ー シ ン グ . . . . 149
A.5 光 線 追 跡 シ ミュレ ー ション の 概 要 . . . . 152
A.6 簡 易 フ ロ ー チャー ト1 . . . . 153
A.7 簡 易 フ ロ ー チャー ト2 . . . . 154
A.8 ファー フィー ル ド と ニ ア フィー ル ド . . . . 157
A.9 LED点 光 源 モ デ ル . . . . 158
A.10球 受 光 部・円 板 受 光 部 モ デ ル . . . . 159
A.11θinの 計 算 . . . . 160
A.12コ サ イ ン コ レ ク タ の 外 観 . . . . 160
A.13二 次 光 線 追 跡 . . . . 161
A.14反 射 点Bか ら 出 射 さ れ る 光 線 . . . . 162
A.15拡 散 反 射 モ デ ル . . . . 163
A.16乱 数 に よ る 完 全 拡 散 反 射 の モ デ ル . . . . 165
B.1 指 先 セ ン サ . . . . 168
B.2 対 象 物 の 傾 き と 反 射 光 分 布 中 心 位 置 の 関 係. . . . 168
xi
B.3 ロ ボット ハ ン ド へ の ネット 状 近 接 覚 セ ン サ の 実 装 . . . . 169
B.4 ピッチ 方 向 の 姿 勢 出 力 情 報 . . . . 170
B.5 ヨ ー 方 向 の 姿 勢 出 力 情 報 . . . . 170
B.6 光 学 素 子 指 向 性-姿 勢 出 力 特 性 シ ミュレ ー ション 条 件 . . . . 172
B.7 半 値 角(Half Value Angle,HVA):光 学 素 子 の 指 向 性 . . . . 172
B.8 指 向 性-姿 勢 出 力 特 性 の 変 化 . . . . 173
B.9 対 象 物-セ ン サ の 距 離・姿 勢 の 関 係 . . . . 174
B.10 焦 点 距 離(OMRON社 製 フォト リ フ レ ク タEESY-1200) . . . . 175
B.11 フォト リ フ レ ク タ 焦 点 距 離 シ ミュレ ー ション 条 件. . . . 176
B.12 フォト リ フ レ ク タ 単 素 子 焦 点 距 離 シ ミュレ ー ション 結 果 . . . . 176
B.13 セ ン サ 検 出 素 子 の 配 置 と 呼 称 の 対 応 . . . . 178
B.14 分 割 数 が 増 加 す る 行 方 向 の 姿 勢 出 力 . . . . 178
B.15 分 割 数 が 変 化 し な い 列 方 向 の 姿 勢 出 力. . . . 179
B.16 新 規 に 製 作 す る ハ ン ド 指 先 形 状 . . . . 180
B.17 提 案 す る 指 先 素 子 配 置 案 . . . . 181
B.18 傾 斜 角 度δの 検 討. . . . 182
B.19 素 子 傾 斜 角 度δ-姿 勢 出 力 特 性 . . . . 182
B.20 各 距 離dに お け る 素 子 傾 斜 角 度δ-姿 勢 出 力 特 性. . . . 183
B.21 傾 斜 角 度δと 距 離 出 力 特 性 の 検 討 . . . . 184
B.22 素 子 傾 斜 角 度δ-距 離 出 力 特 性 . . . . 184
B.23 ハ ン ド 指 先 セ ン サ シ ミュレ ー ション 条 件 . . . . 185
B.24 素 子 数 と 指 先 姿 勢 に 対 す る 距 離 出 力 特 性 . . . . 186
B.25 フォト リ フ レ ク タ 並 列 接 続 . . . . 187
B.26 距 離 出 力 変 動 係 数-指 腹 部 素 子 間 隔ψ . . . . 188
B.27 新 規 製 作 し た ハ ン ド 指 先 セ ン サ . . . . 188
B.28 距 離 出 力 特 性 実 験 装 置 . . . . 189
B.29 ロ ー ル 角 姿 勢 出 力 特 性 実 験 装 置 . . . . 190
B.30 距 離 出 力 特 性 実 験 装 置 . . . . 191
B.31 距 離 出 力 特 性 実 験 結 果-シ ミュレ ー ション 結 果 比 較 . . . . 192
B.32 ロ ー ル 角 姿 勢 出 力 特 性 実 験 結 果-シ ミュレ ー ション 結 果 比 較 . . . . 192
B.33 ピッチ 角 姿 勢 出 力 特 性 実 験 結 果-シ ミュレ ー ション 結 果 比 較 . . . . 193 B.34 ピッチ 角 回 転 距 離 出 力 特 性-シ ミュレ ー ション 結 果 比 較 . . . . 193 B.35 セ ン サ 回 転 中 心 の 差 異 . . . . 195 B.36 ロ ー ル 方 向 姿 勢 出 力 比 較 . . . . 195
xiii
表 目 次
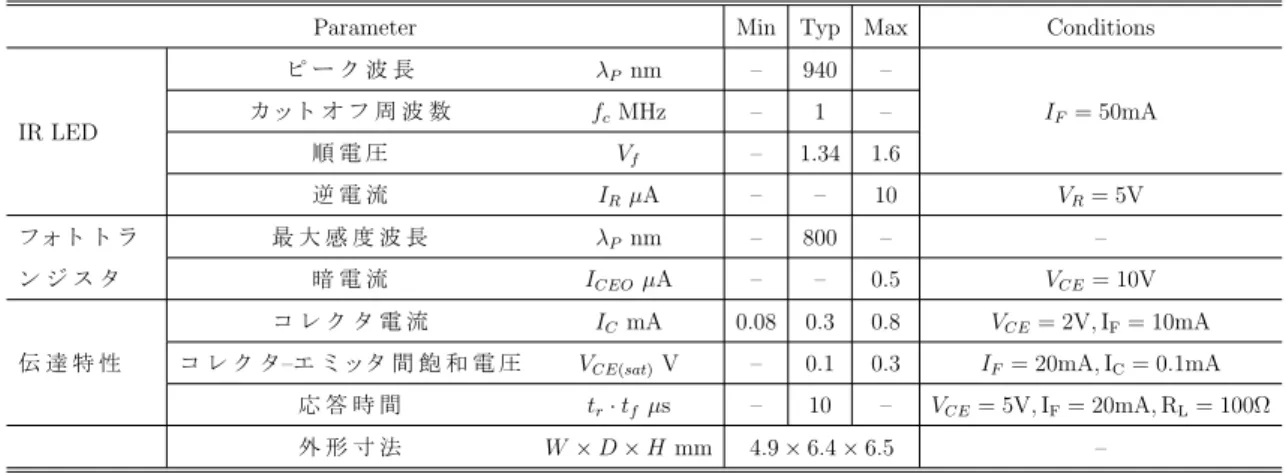
3.1 ROHM RPR-220の 代 表 特 性 . . . . 26
4.1 8パ タ ー ン の モ ジュー ル. . . . 56
7.1 Gold符 号 生 成 の た め のPreferred Pair (n= 5· · ·13)[10] . . . . 96
7.2 シ ミュレ ー ション モ デ ル に お け る 設 計 パ ラ メ ー タ . . . . 101
8.1 制 御 装 置 の 構 成 . . . . 120
B.1 d= 5mmに お け る 姿 勢 出 力 の 反 転 (反 転 し な い:○ 反 転:×) . . . 173
B.2 変 動 係 数 . . . . 185
第 1 章 序論
1.1 ロ ボット に お け る 外 界 セ ン シ ン グ
ロ ボット と 人 間 の 共 存 を 実 現 す る 上 で ,多 様 で 変 化 す る 環 境 で ,安 全 か つ 実 用 的 な 速 度 で 作 業 を 行 え る こ と は 必 須 の 機 能 で あ る .そ の た め に ,外 界 セ ン サ に よ る 環 境 の 検 出 と 認 識 が 行 わ れ る が ,大 別 す る と 非 接 触( 視 覚・距 離・測 域 )セ ン サ と 接 触( 力 覚・触 覚 )セ ン サ が 使 用 さ れ る .し か し ,ロ ボッ ト の 至 近 距 離 に 物 体 が 存 在 し ,か つ 非 接 触 の 場 合 こ の2種 類 の 組 み 合 わ せ で は 物 体 の 見 落 と し が 生 じ て し ま う.カ メ ラ 等 の 視 覚 セ ン サ は 視 野 の 制 限 や オ ク ル ー ジョン の 発 生 に よ る 視 覚 情 報 の 欠 落 を 生 じ ,ま た 検 出 原 理 上 ,力 覚・触 覚 セ ン サ で は 接 触 力 の 働 か な い 状 態 で は 一 切 情 報 が 得 ら れ な い た め で あ る .こ う いった 情 報 の 欠 落 の た め ,複 雑 な 環 境 下 で ロ ボット が 安 全 か つ 素 早 く 動 作 す る こ と は 困 難 で あ る .
さ ら に ,ロ ボット 近 傍 に 存 在 す る 物 体 が 運 動 す る 場 合 ,そ のTime to Contact が 短 い こ と か ら ,行 動 を 決 定 し 実 行 す る( 例 え ば 回 避 す る ,一 定 距 離 を 保 ち 追 従 す る ,柔 ら か く 接 触 す る ,衝 撃 力 を 与 え る な ど )う え で の 時 間 的 余 裕 が 短 い と い う 問 題 が あ る .こ の た め と く に 把 持 や マ ニ ピュレ ー ション に お い て は 物 体 と ロ ボット の 相 対 位 置 を 素 早 く 得 る こ と が 重 要 と な る .
1.2 従 来 研 究
こ の 接 触–非 接 触 の 中 間 領 域 で の 物 体 検 出 の た め ,近 接 覚 セ ン サ が 一 般 に 用 い ら れ て い る .近 接 覚 セ ン サ と は 数 セ ン チ メ ー ト ル 内 の 至 近 距 離 へ の 物 体 接 近 を 検 知 す る セ ン サ で あ り,赤 外 線 ,超 音 波 ,渦 電 流 ,静 電 容 量 な ど 各 種 の 検 出 方 式 が 提 案 さ れ て い る .マ ニ ピュレ ー タ に お け る 近 接 覚 セ ン サ
2
第1章 序 論contactNon-
Contact
(a)Past System (b)Proposed System
Occlusion Shadow Vision
Tactile
?
Vision
Proximity
Tactile Slip
図1.1 近 接 覚 セ ン サ ベ ー ス ト 制 御 の 概 念 図
フィー ド バック の 先 行 研 究 は ,古 く は1970年 代 よ り 報 告 さ れ て い る .Johnston[1]
やBonenら[2]ら に よ る グ リッパ 先 端 へ の 取 付 を 目 指 し た 光 学 式 セ ン サ ヘッド,
Schoenwald[11]ら に よ る 超 音 波 セ ン サ を 備 え た マ ニ ピュレ ー タ や ,Balek[3]ら に よ る セ ン サ ベ ー ス ト 制 御 が 提 案 さ れ た .
ま た 近 年 で は ,な ぞ り 動 作 に 基 づ く 物 体 形 状 の 認 識[12, 13],電 界 検 出 に よ る pre-touchセ ン シ ン グ を 用 い た 多 指 ハ ン ド に よ る 物 体 追 従[14, 15]や ,光 学 式 近 接 覚 セ ン サ と 確 率 論 的 セ ン サ モ デ ル を 組 み 合 わ せ た 反 射 的 把 持 制 御[16]が 報 告 さ れ て い る .
こ れ ら の 方 式 に 加 え ,Volpeら が 宇 宙 用 マ ニ ピュレ ー タ へ の 応 用 を 想 定 し た 比 較 検 討[17]の 中 で 挙 げ た よ う に ,赤 外 光( 照 度 ,time-of-flight[18],三 角 測 量
[19]),超 音 波 ,静 電 容 量[6]な ど が 使 用 さ れ て い る .
し か し な が ら こ れ ら の セ ン サ の ほ と ん ど は ,単 一 の 検 出 部 に 正 対 す る 限 ら れ た 領 域 内 で の 物 体 検 知 の み を 行 う こ と が で き る .そ れ ゆ え ,た と え ば ロ ボット ハ ン ド の 指 先 ,マ ニ ピュレ ー タ,さ ら に は ロ ボット 全 身 に 検 出 範 囲 を 広 げ る 場 合 ,多 数 の 検 出 点 を 効 率 的 に 統 合 す る こ と が 必 要 と な る .こ の よ う
図1.2 Johnston に よ る 光 学 式 近 接 覚 セ ン サ [1]
図1.3 Bonenに よ る 光 学 式 近 接 覚 セ ン サ[2]
図1.4 Balek ら に よ る グ リッパ 搭 載 型 近 接 覚 セ ン サ [3]
4
第1章 序 論図1.5 “RI-MAN”に 搭 載 さ れ た8x8 マ ト リ ク ス 型 近 接 覚 セ ン サ [4, 5]
な 課 題 は 触 覚 セ ン サ と 共 通 す る も の で あ り,一 般 に は マ ト リ ク ス ス キャン , 組 み 込 み コ ン ト ロ ー ラ,フィー ル ド ネット ワ ー ク の 組 み 合 わ せ に よ り 実 現 さ れ る .多 数 の タ ク セ ル(Taxel:触 覚 に お け る 単 一 の 検 出 点 の こ と)を 統 合 し た ロ ボット 皮 膚 の シ ス テ ム 化 と し て は 以 下 の も の が 報 告 さ れ て い る .[20],[21].
向 井・小 田 島 ら は 介 護 支 援 ロ ボット“RI–MAN”の 開 発 に お い て ,人 と 直 接 接 す る 抱 え 上 げ 動 作 と い う 高 い 安 全 性 を 実 現 す る た め ,柔 軟 な 表 面 に 内 蔵 で き る 面 状 触 覚 セ ン サ シ ー ト を 開 発 し た[4, 5].64個 の 圧 力 セ ン サ 素 子( フ ジ ク ラ FPBS-04A)を ア レ イ 状 に 配 置 し ,分 散 配 置 さ れ た コ ン ト ロ ー ラ に よ り 計 測 が 行 わ れ る .RI-MANで は ,こ の セ ン サ シ ー ト を5カ 所( 上 腕・前 腕・胸 前 面 )に 備 え ,各 セ ン サ よ り0次 ,1次,2次 の 接 触 力 モ ー メ ン ト を 得 て 運 動 を 制 御 し て い る .
一 方 で ,近 接 覚 セ ン サ に お け る 同 様 の 取 り 組 み は 少 な い .Leeら は , PDMS(Polydimethylsiloxane)上 に16×16個 の 電 極 マ ト リ ク ス を 形 成 し た 静 電 容 量 型 触 覚・近 接 覚 複 合 セ ン サ を 開 発 し た[6].22mm角 の 検 出 部 に ,直 交 す る 16列 の 電 極 群 を 形 成 す る こ と で ,接 触 力 に よ る 変 形 か ら 生 じ た 静 電 容 量 の
図1.6 Lee ら に よ る 近 接・触 覚 複 合 型 セ ン サ [6]
変 化 に よ る 触 覚 セ ン シ ン グ と ,電 極-物 体 間 に 生 じ る 静 電 結 合 に よ り 近 接 覚 セ ン シ ン グ を 実 現 し て い る .文 献[12]でWalkerら が 使 用 し た 指 先 が ,複 数 本 の 光 ファイ バ に つ い て 一 端 を 指 の 周 囲 に 並 べ た 検 出 部 を 構 成 し ,他 端 をCMOS イ メ ー ジ セ ン サ に 結 合 す る こ と で ,36点 の 分 布 型 近 接 覚 セ ン サ を 構 成 し て い る .
ま た ,Kimら は ,S字 型 の 銅 箔 にLED・フォト ダ イ オ ー ド を フ リップ チップ 実 装 し ,PDMSに 封 入 す る こ と で ,防 水 か つ 伸 縮 可 能 なLEDア レ イ 光 学 式 近 接 覚 セ ン サ を 構 成 す る こ と に 成 功 し て い る[7].
以 上 に 加 え て ,触 覚 セ ン サ シ ス テ ム の 中 に も ,原 理 上 近 接 覚 セ ン サ へ の 展 開 が 容 易 な も の も 存 在 す る .特 に 大 村 ら の ,“切 り 貼 り 触 覚 セ ン サ”( 図 1.8)[8]は ,等 身 大 ヒュー マ ノ イ ド ロ ボット の 全 身 に1800ヶを 超 え る 触 覚 セ ン サ
6
第1章 序 論2 mm
1.0 Flat Inflated
Strain (%)
Meridional Circumferential 0.8
0.6
Current (mA)
0.4 0.2 Initial 0
Horizontal: ~48%
Diagonal: ~46%
Released
1.0 40
3035 25 2 0 0.8
0.6
Current (mA) V at I = 20 µA (V)
0.4 0.2 0
10 20 30 40
0 Voltage (V) 50 1 10 102 103 104 Cycle 105
0 10 20 30
Voltage (V)40 0 10 20 30 40
50 60
a d e
f g
b
c
5 mm Flat
Ag paste
Inflated
Flat
Inflated
500 µm l
a n o g a i D l
a t n o zi r o H
Stretched, ~48% Stretched, ~46%
200 µm
1 mm
n p
図1.7 Kimら に よ るµ-ILED arrays [7]
Urethane
An urethane foam
A flexible Substrate Photo reflectors
Analog Signal1
LED Switch 1
LED Switch 2
Analog Signal2 Analog
Signal3 Analog Signal4 Vcc
(a) Tactile sensor element.
(b) Scanning control. (c) Installed tactile sensor sheet consisting of 120 sensing elements.
図1.8 大 村 ら の“切 り 貼 り 触 覚 セ ン サ”[8]
を 実 装 す る た め ,モ ジュー ル 性 の 高 い シ ス テ ム 構 成 と ,櫛 形 形 状 の フ レ キ シ ブ ル 基 板 に よ り 装 着 部 位 の 曲 面 に 合 わ せ て セ ン サ エ レ メ ン ト の 配 置 を 調 節 で き る 形 状 を 備 え て い る .検 出 原 理 と し て 光 反 射 に よ る 変 形 検 出 を 行 う 事 か ら ,検 出 エ レ メ ン ト 内 の フォト リ フ レ ク タ を 外 部 に 開 放 す る こ と で ,近 接 覚 セ ン サ へ の 応 用 が 可 能 と 考 え ら れ る .
し か し な が ら ,変 化 す る 環 境 中 で の 高 速 な 動 作 を 実 現 す る 観 点 か ら は ,こ れ ら の 一 般 的 な 手 法 は 最 適 と は い え な い .な ぜ な ら ,こ れ ら の 方 式 で は 分 布 情 報 の 空 間 的 な 密 度・分 解 能 に は 優 れ る 一 方 で ,測 定 点 数 に 応 じ て 膨 大 な 配 線 数 ,デ ー タ 取 得・処 理 時 間 ,転 送 の た め の 通 信 帯 域 な ど 多 く の 技 術 的 課 題 を 抱 え て い る た め で あ る .こ の 問 題 点 に よ り,フィー ド バック を 伴った 高 速 な 動 作 を 実 現 す る 上 で 重 要 と な る ,近 接 領 域 で の 環 境 情 報 を 低 遅 延 で 取 得 す る こ と は 困 難 で あ る .
こ れ ま で ,著 者 ら の グ ル ー プ で は ,1000フ レ ー ム 毎 秒 の 高 速 ア ク ティブ ビ ジョン セ ン サ とCenter-of-Pressure (CoP) 触 覚 セ ン サ に よ る セ ン サ フィー ド バッ ク を 組 み 合 わ せ た 超 高 速 マ ニ ピュレ ー ション シ ス テ ム の 研 究 を 行って き た .こ の シ ス テ ム で は ,視 覚・触 覚 セ ン サ ー フィー ド バック に よ る1ミ リ 秒 周 期 で の 制 御 サ イ ク ル を 実 現 し ,こ れ ま で に 高 速 ペ ン 回 し[22]や す べ り 検 出 に 基 づ く 把 持 力 調 節[9]と いった タ ス ク を 達 成 し て き た .し か し な が ら ,視 触 覚 フィー ド バック に よ る マ ニ ピュレ ー ション で は ,近 接 領 域 で の 情 報 欠 落 が 致 命 的 で あ り,と く に 把 持 動 作 に お け る 非 接 触–接 触 状 態 間 の 移 行 に 課 題 を 残 し て い た .
こ の よ う な 速 度 領 域 で 実 用 的 な 面 状 近 接 覚 セ ン サ と そ の 計 測 シ ス テ ム は , こ こ ま で 挙 げ た 既 存 の 各 種 ア プ ロ ー チ の み で は 実 現 困 難 と い え る .
1.3 当 研 究 の 目 的
当 研 究 で は 以 上 の 問 題 点 を 踏 ま え ,高 速 動 作 す る ロ ボット に 適 し た 高 速 応 答 を 実 現 す る 近 接 覚 セ ン サ の 構 成 方 式 と し て ,“抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ”を 提 案 す る .抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ は ア レ イ 状 に 配 置 し た 反 射 型 赤 外 線 セ ン サ( フォト リ フ レ ク タ )と そ れ ら を 結 合 す る 抵 抗 回 路 網 に よ り 構 成 さ れ ,光 電 流 分 布 の1次 モ ー メ ン ト を 算 出 す る こ
8
第1章 序 論Finger1
Plastic Bottle Laser Displacement Sensor
Finger2
Finger2 Finger1
Laser Displacement Sensor
CoP Sensor
Plastic Bottle (weight:100[g],150[g],200[g])
図1.9 高 速 多 指 ロ ボット ハ ン ド を 用 い た す べ り 検 出 に 基 づ く 把 持 力 調 節 [9]
と で 近 接 領 域 で の 物 体 位 置 に つ い て ,素 子 個 数 に 依 存 せ ず1ミ リ 秒 以 内 の 応 答 時 間 を 達 成 す る .本 論 文 で は そ の 基 礎 的 な 検 出 原 理 と ,実 環 境 で 動 作 す る ロ ボット 実 機 に 応 用 す る 上 で の 各 種 問 題 に つ い て 解 決 策 を 提 案 し ,高 速 か つ 実 用 的 な 近 接 覚 セ ン サ の 構 成 方 法 を 提 供 す る .
1.4 本 論 文 の 構 成
本 論 文 は 全9章 で 構 成 さ れ ,各 章 の 概 要 は 下 記 の 通 り で あ る .
第1章 で は ,自 律 ロ ボット の 制 御 に お け る 近 接 覚 セ ン サ の 重 要 性 に つ い て 論 じ る .ま た ,関 連 す る 先 行 研 究 に つ い て 紹 介 し ,そ れ ら の 問 題 点 に つ い て 整 理 し た 後 ,提 案 す る セ ン サ シ ス テ ム の 位 置 づ け と 研 究 目 的 に つ い て 述 べ る .
第2章 で は ,当 研 究 の 基 礎 と な る“抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ”方 式 の 構 造 と 動 作 原 理 を 示 す.
第3章 で は ,動 作 原 理 を 確 認 す る た め ,5×5素 子 の セ ン サ を 設 計・試 作 し , そ の 基 礎 的 検 出 特 性 の 確 認 を 行った .
第2章 抵抗ネットワーク型 近接覚センサアレイの
動作原理
第3章 抵抗ネットワーク型 近接覚センサアレイの
基礎特性の確認 第4章
抵抗ネットワークの 派生形態
第5章 物体反射率・寸法に 依存しない距離計測法
第6章 フォトダイオード
受光型への拡張
第7章 多センサ共存を 考慮した変調方式
Appendix A 近接覚センサアレイへの
レイトレーシング法の 適用
Appendix B 対象物面姿勢検出に 適したロボットハンド
指先センサの設計 第8章 ロボットハンド
への応用
・外乱耐性
・多チャンネル共存
・応答速度向上
・異なる物理量
・大面積化
・360°継ぎ目なし
・特性の事前予測
・多様な物体への対応
・作業に適した検出特性 の実現
・センサ出力を活用する 制御システム
図1.10 本 論 文 の 構 成 と 研 究 課 題 と の 関 連
第4章 で は ,近 接 素 子 の 出 力 統 合 に 用 い る 抵 抗 ネット ワ ー ク に つ い て 変 形 を 行 い ,種々の 応 用 に 適 し た 派 生 形 態 を 示 す.
第5章 で は ,赤 外 線 反 射 に 基 礎 を と す る 当 セ ン サ に お け る ,相 対 値 計 測 に よ る 反 射 特 性 の 補 償 手 法 に つ い て 述 べ る .
第6章 で は ,さ ら な る 高 速 化 を 目 指 し ,受 光 素 子 と し てPIN型 フォト ダ イ オ ー ド を 使 用 可 能 と し た 応 用 形 態 の 設 計 と そ の 検 出 性 能 に つ い て 示 す.
第7章 で は ,高 速・広 帯 域 を 実 現 し た フォト ダ イ オ ー ド 受 光 方 式 を 使 用 し , 複 数 チャン ネ ル ,他 方 式 セ ン サ,外 乱 光 源 と の 共 存 を 実 現 す る 実 用 的 な 信 号 処 理 手 法 に つ い て 検 討 を 行 う.
第8章 で は ,開 発 し た 近 接 覚 セ ン サ の 高 速 性 を 活 用 し た ロ ボット シ ス テ ム の 構 築 と そ の 制 御 ア ー キ テ ク チャに つ い て 論 じ る .
第9章 で は ,当 研 究 の 成 果・結 論 を ま と め た 上 で ,今 後 の 課 題 と 展 望 に つ い て 述 べ る .
な お ,図1.10に ,本 論 文 各 章 の 内 容 と 研 究 課 題 と の 関 連 を 図 示 す る .図 中
10
第1章 序 論で 四 角 で 囲 ま れ て い る 内 容 は 第2章 以 後 の 各 章 に 対 応 し ,丸 く 囲 ま れ て い る 内 容 が 解 決 す べ き 研 究 課 題 に 対 応 し て い る .
第 2 章
抵抗ネットワーク型近接覚センサアレ イの動作原理
2.1 概 要
本 章 で は ,“抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ”の 基 礎 と な る 動 作 原 理 の 導 出 と ,そ の 出 力 情 報 の 持 つ 意 味 に つ い て 議 論 を 行 う.当 セ ン サ は ,多 数 の 計 測 点( 検 出 素 子 )か ら 得 ら れ た 光 電 流 を ,抵 抗 ネット ワ ー ク を 用 い て 統 合 す る こ と に よ り,素 子 面 積 に か か わ ら ず 定 数 オ ー ダ ー の 計 測 回 数 で 物 体 の3次 元 位 置 を 実 現 す る .ア ナ ロ グ 演 算 に よ る 多 数 の フォト リ フ レ ク タ の 統 合 と い う ア プ ロ ー チ を 採 用 す る こ と で ,当 セ ン サ は 以 下 の よ う な 特 長 を 備 え て い る .
1. 素 子 数 に よ ら ず セ ン サ 外 へ の 配 線 は4本 の み 2. 単 純 な 繰 り 返 し 構 造 に よ り 小 型 化 が 容 易 3. 大 検 出 面 積 を 低 コ ス ト で 実 現 可 能
本 章 前 半 で は ,そ の 動 作 原 理 に つ い て 回 路 方 程 式 か ら の 導 出 を 行 い ,物 体 位 置 を 代 表 す る 量 で あ る 光 電 流 分 布 の1次 モ ー メ ン ト と 出 力 電 圧 の 関 係 を 明 ら か に す る .後 半 で は ,検 出 素 子 と し て 採 用 し た フォト リ フ レ ク タ の 特 性 を 踏 ま え ,物 体 の 状 態( 形 状・位 置・姿 勢 )と セ ン サ 出 力 の 対 応 に つ い て 議 論 す る .
12
第2章 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 動 作 原 理photo reflector
r
r
r r
r r
E1
E2
E4
E3
r
r Led driver
Led driver
resistor network layers
r
図2.1 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 構 造
2.2 セ ン サ の 構 造 と 動 作 原 理
抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 構 造 を 図2.1 に 示 す.こ の セ ン サ は3層 構 造 か ら な り,m×n個 の 格 子 状 に 配 置 さ れ た フォト リ フ レ ク タ と , そ れ ら の エ ミッタ 端 子・コ レ ク タ 端 子 同 士 を 接 続 す る 抵 抗 ネット ワ ー ク2層 (Layer Aお よ び B)で 構 成 さ れ る .
検 出 素 子 に は 赤 外 線 の 反 射 に よ る フォト リ フ レ ク タ を 使 用 し た .こ の 素 子 は 近 赤 外 線 用 発 光 ダ イ オ ー ド と フォト ト ラ ン ジ ス タ を1パッケ ー ジ に 集 積 し た 素 子 で あ り,LEDが 発 し た 赤 外 線 は 検 出 対 象 物 体 の 表 面 で 反 射 し ,フォト ト ラ ン ジ ス タ に よ り 光 電 流 と し て 検 出 さ れ る .こ の 過 程 で の 受 光 量 の 減 衰 に 基 づ い て 物 体 距 離 を 測 定 す る こ と が 可 能 で あ る .ア レ イ 状 に 配 置 す る こ と に よ り,検 出 物 体 の 形 状・寸 法・位 置・姿 勢・距 離 に 応 じ た 高 電 流 分 布 が 得 ら れ る .
次 に ,2層 の 抵 抗 ネット ワ ー ク,Layer A とB は ,そ れ ぞ れx軸 方 向 ,y軸 方 向 に つ い て 光 電 流 の1次 モ ー メ ン ト を 計 算 す る た め に 用 い ら れ る .図2.1に 示 し た よ う に ,Layer A は ,4近 傍 の フォト ト ラ ン ジ ス タ の コ レ ク タ 端 子 同 士 を 抵 抗 値r [Ω] で 格 子 状 に 接 続 し て い る .さ ら に ,x軸 方 向 の 電 流1次 モ ー メ ン ト を 求 め る た め ,電 極E1とE3が 抵 抗 回 路 網 の 両 端 に 設 け ら れ て お り,外 部
b1 b2
b3 b4
S2
S4
a1 a2
a3 +V0
S
R0 R0
1 S3
j=n
j=2
j=1
i=1 i=2 i=m
i=0 i=m+1
j=n+1
j=0
࣭࣭࣭࣭࣭࣭
x y r
r
r
r
a1
a2
a3 a4
b1
b2
b3 b4
Layer A
Layer B single element
a4
R0
R0
+V0
-V0
Vd GND LED photo transistor
࣭࣭࣭࣭࣭࣭
r r r
r
図2.2 検 出 素 子 の 座 標 と 抵 抗 ネット ワ ー ク の 境 界 条 件
抵 抗R0[Ω]を 介 し て 正 の 電 圧 源+V0に 接 続 さ れ る .Layer B も 同 様 に ,エ ミッ タ 端 子 同 士 を 抵 抗r [Ω]で 接 続 す る .Layer A と 異 な り,y軸 方 向 の1次 モ ー メ ン ト を 得 る た め ,電 極E2お よ びE4が 設 け ら れ て お り,Layer A と は 直 交 す る 配 置 と なって い る .Layer A同 様 ,E2とE4は 外 部 抵 抗R0[Ω]を 介 し て 負 電 圧 源
−V0に 接 続 さ れ て い る .
こ の 回 路 構 造 に よ り,赤 外 線 を フォト ト ラ ン ジ ス タ が 受 光 す る と ,正 電 源 +V0か ら の 電 流 は 回 路 両 端 の 電 極E1とE3を 通 じ てLayer A に 流 入 す る .そ の 後 受 光 量 に 応 じ て 各 フォト ト ラ ン ジ ス タ を 流 れ た 後 ,Layer Bを 通 り 電 極E2 とE4か ら 負 電 源−V0に 流 入 す る .抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ で は ,こ の4つ の 電 極 の 電 圧VS1, VS2, VS3, VS4か ら ,電 流 分 布 の1次 モ ー メ ン ト を 算 出 し て い る .さ ら に 電 流 分 布 を 検 出 対 象 物 体 と の 距 離 に 応 じ て 生 成 す る こ と で , 検 出 面 上 で の 物 体 位 置 を1次 モ ー メ ン ト を 元 に 検 出 す る こ と が 可 能 と な る . そ の 詳 細 な 原 理 に つ い て 以 下 に 述 べ る .
14
第2章 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 動 作 原 理Layer A
Layer B
Va
(i,j)r
r r r
r r
r r
r r
I(i,j)
Va
(i-1,j)Va
(i,j-1)Va
(i+1,j)Va
(i,j+1)V
b(i+1,j)V
b(i,j-1)V
b(i-1,j)V
b(i,j+1)V
b(i,j)y x
図2.3 検 出 素 子( フォト ト ラ ン ジ ス タ )近 傍 の 等 価 回 路
2.2.1 検 出 素 子 の 座 標 系
ま ず,図2.2に 示 す よ う に ,x-y座 標 系 上 に4頂 点 の 座 標 が ,(1, 1), (-1, 1),(-1, -1), (1, -1)と な る よ うm×nの マ ト リック ス 状 に 配 置 さ れ た 近 接 覚 セ ン サ 素 子 及 び 電 極 の イ ン デック ス を(i, j)(i = 1,2,3,・・・, m, j = 1,2,3,・・・, n)と す る .位 置 (x, y) = (−1,−1)上 の 素 子 を(i, j) = (1,1)と し ,x軸 方 向 にi= 1,2, . . . , m,y軸 方 向 にj = 1,2, . . . , nと 付 番 す る .検 出 素 子 を 等 間 隔 に 配 置 す る と ,素 子(i, j)の 位 置 座 標(xe, ye)は 次 式 で 表 さ れ る .
xe(i, j) = 2i−m−1
m−1 ye(i, j) = 2j −n−1
n−1 (2.1)
等 差 数 列 と な る こ と か ら , (xe, ye)は ,a,b,c,dを 定 数 と し ,次 式 の よ う に お く こ と が で き る .
xe(i, j) =ai+b ye(i, j) =cj+d (2.2)
こ の 関 係 か ら ,式(2.3),(2.4)の よ う にxe, yeの ラ プ ラ ス 演 算 子 は ゼ ロ と な る .
∇2xe(i, j) = xe(i−1, j) +xe(i+ 1, j) +xe(i, j−1) +xe(i, j+ 1)−4xe(i, j)
={a(i−1) +b}+{a(i+ 1) +b}+{ai+b}+{ai+b} −4{ai+b}
= 0 (2.3)
∇2ye(i, j) = ye(i−1, j) +ye(i+ 1, j) +ye(i, j−1) +ye(i, j+ 1)−4ye(i, j)
={cj+d}+{cj+d}+{c(j−1) +d}+{c(j+ 1) +d} −4{cj+d}
= 0 (2.4)
こ の 関 係 は2.2.4節 で 使 用 す る .
2.2.2 検 出 素 子 周 辺 の 回 路 と 基 礎 方 程 式
図2.3に は セ ン サ 素 子(i, j)近 傍 回 路 を 示 す.フォト ト ラ ン ジ ス タ の コ レ ク タ 電 流 をI(i, j),抵 抗 ネット ワ ー ク の 抵 抗 値 をrと す る .ま た ,格 子 点 のA層 , B層 の 電 圧 を そ れ ぞ れVa(i, j),Vb(i, j)と す る .こ の と き ,Kirchhoffの 電 流 則 よ り,A層 に つ い て フォト ト ラ ン ジ ス タ(i, j)の 電 流I(i, j)に 対 し て 以 下 の 式 が 成 り 立 つ .
1
r{Va(i−1, j) +Va(i+ 1, j) +Va(i, j−1) +Va(i, j+ 1)−4Va(i, j)}=I(i, j) (2.5) こ こ で ,式(2.5)の 左 辺 を 式(2.6)で 挙 げ た 離 散 系 の ラ プ ラ ス 演 算 子∇2を も ち い て 置 き 換 え る と ,式(2.7)を 得 る .
∇2Va(i, j) = Va(i− 1, j) + Va(i + 1, j) +Va(i, j −1) +Va(i, j + 1)−4Va(i, j) (2.6)
1
r∇2Va(i, j) =I(i, j) (2.7) B層 に つ い て も 同 様 の 式 が 成 り 立 つ .
1
r∇2Vb(i, j) = −I(i, j) (2.8)
16
第2章 抵 抗 ネット ワ ー ク 型 近 接 覚 セ ン サ ア レ イ の 動 作 原 理2.2.3 抵 抗 ネット ワ ー ク の 境 界 条 件
次 に ,回 路 の 境 界 条 件 に つ い て 考 え る .ま ずA層 に つ い て ,境 界S2,S4は ど こ に も 接 続 が な く,Va(i,0)とVa(i, n+ 1)は オ ー プ ン 端 末 で あ る .こ の た め 電 流 の 出 入 り は な く,電 圧 は 変 化 し な い .よって 境 界 条 件 は 次 式 の 通 り.
Va(i,0) =Va(i,1) Va(i, n+ 1) =Va(i, n) (2.9) 次 に ,境 界S1,S3は 電 極E1とE3に 各々接 続 さ れ て い る た め ,外 部 抵 抗R0を 通 し て 電 流 の 流 入 が 生 じ る .オ ー ム の 法 則 よ り,こ の 電 流 はR0両 端 の 電 圧 降 下 を 生 じ る た め ,検 出 素 子 に 流 れ る 電 流 の 総 和 はR0を 流 れ る 電 流 に 等 し い .よって 式(2.10)( 電 極E1側 ),式(2.11)( 電 極E3側 )が 成 り 立 つ .
1 R0
(
V0 −VS1 )
= 1 r
∑n j=1
(
VS1−Va(1, j) )
(2.10) 1
R0 (
V0 −VS3
)
= 1 r
∑n j=1
(
VS3−Va(m, j) )
(2.11) ま た ,S1及 びS3 で は そ れ ぞ れ 電 極 に 接 続 し て い る こ と か ら 次 式 の よ う に な る .
Va(0, j) = VS1 Va(m+ 1, j) = VS3 (2.12) 同 様 にB層 の 境 界 条 件 は 式(2.13)-(2.16)の よ う に な る .
Vb(0, j) = Vb(1, j) Vb(m+ 1, j) = Vb(m, j) (2.13) Vb(i,0) =VS2 Vb(i, n+ 1) =VS4 (2.14)
1 R0
(−V0−VS2
)
= 1 r
∑m i=1
(
VS2−Vb(i,1) )
(2.15) 1
R0
(−V0−VS4 )
= 1 r
∑m i=1
(
VS4−Vb(i, n) )
(2.16)
2.2.4 光 電 流 の 1 次 モ ー メ ン ト
近 接 覚 セ ン サ に 物 体 が 接 近 し た 場 合 ,フォト ト ラ ン ジ ス タ を 流 れ る 電 流 I(i, j)が 前 節 の よ う に 変 化 す る こ と に な る .即 ち ,ネット 状 近 接 覚 セ ン サ に
![図 1.2 Johnston に よ る 光 学 式 近 接 覚 セ ン サ [1]](https://thumb-ap.123doks.com/thumbv2/123deta/7733548.1711699/24.892.337.594.188.432/図12Johnstonによる光学式近接覚センサ1.webp)
![図 1.6 Lee ら に よ る 近 接・触 覚 複 合 型 セ ン サ [6] 変 化 に よ る 触 覚 セ ン シ ン グ と ,電 極-物 体 間 に 生 じ る 静 電 結 合 に よ り 近 接 覚 セ ン シ ン グ を 実 現 し て い る .文 献 [12] で Walker ら が 使 用 し た 指 先 が ,複 数 本 の 光 ファイ バ に つ い て 一 端 を 指 の 周 囲 に 並 べ た 検 出 部 を 構 成 し ,他 端 を CMOS イ メ ー ジ セ ン サ に](https://thumb-ap.123doks.com/thumbv2/123deta/7733548.1711699/26.892.337.594.177.670/Leeらよる近接触覚複合型センサ化ファイ.webp)
![図 1.8 大 村 ら の “切 り 貼 り 触 覚 セ ン サ” [8]](https://thumb-ap.123doks.com/thumbv2/123deta/7733548.1711699/27.892.128.728.190.614/図18大村らの切り貼り触覚センサ8.webp)
![図 3.7 距 離 出 力 特 性 ま で 変 化 さ せ た 場 合 の 総 電 流 出 力 I all の 変 化 を 測 定 し た .そ の 結 果 を 図 3.7 に 示 す。距 離 d =40[mm] 程 度 ま で 良 好 に 距 離 検 出 が 行 え て い る こ と が 読 み 取 れ る . 3.3.4 過 渡 応 答 特 性 最 後 に ,過 渡 応 答 特 性 に つ い て 設 計 仕 様 で あ る 応 答 速 度 1[ms] を 満 た す こ と の 確 認 を 行った](https://thumb-ap.123doks.com/thumbv2/123deta/7733548.1711699/53.892.178.769.177.578/離出力特性変化せ場合総電す距行っ.webp)