Studies on Information
Gathering Methods under Shared Spectrum in Cognitive Radio
Mai Ohta
Department of Communication Engineering and Informatics The University of Electro-Communications
A thesis submitted for the degree of Doctor of Philosophy
March 2013
Studies on Information Gathering Methods under Shared Spectrum in Cognitive Radio
APPROVED BY SUPERVISORY COMMITTEE
Chairperson: Associate Professor Takeo Fujii
Member: Professor Yoshio Karasawa
Member: Professor Yasushi Yamao
Member: Professor Sadao Obana
Member: Doctor Masayuki Ariyoshi
Copyright © 2013 by Mai Ohta
All Rights Reserved
コグニティブ無線における周波数共用環境での 情報収集手法に関する研究
太田 真衣
概要
現在、無線通信において周波数リソース不足が深刻な問題となって おり、実質的な周波数資源を増加させる抜本的な技術としてコグニ ティブ無線システムが注目されている。本論文では、コグニティブ 無線システムの1 つである周波数共用型システムに焦点を当て、空 いている既存システムの周波数帯を他のシステム(2 次システム)
が利用するために必要な技術として周辺端末から周辺情報を集め る手法を提案している。さらに、本手法を用いた場合、位置の分か らない既存システムに干渉を与えないよう電力設計を行うことで 既存システムに対して許容干渉量を満足しつつ周波数共用が行え る手法について評価を行う。また、周波数共用時に既存システムの 信号検出を繰り返すことにより、既存システムの存在しない範囲を 拡大させることで送信電力を増加させ、より遠方にいる端末から情 報を得る手法についても検討している。周波数共用において、周辺 情報だけでなく、2 次システムの伝送情報の特徴に応じて周波数選 択する手法について提案を行い、周波数選択における選択指標確率 について研究を行った結果について述べる。最後に、将来の展望に ついて述べる。
Studies on Information Gathering Methods under Shared Spectrum in Cognitive Radio
Mai Ohta
Abstract
One potential remedy for improving spectrum utilization is a
spectrum sharing of a cognitive radio system. In the wireless
communication, because each existing systems have exclusive
spectrum resources, new systems of wireless communications
cannot work with these spectrum. From this reason, the
wireless spectrum scarcity grows into a serious problem. Then,
a cognitive radio system (CRS) can realize a dynamic spectrum
access (DSA) by sharing the spectrum between existing
systems (called primary system) and new systems (called
secondary systems). However, in order to secondarily use the
spectrum of the primary system (PS), secondary system (SS)
has the responsibility for protecting the PS by recognizing the
surrounding wireless environment, i.e., cooperative sensing
methods. Cooperative sensing methods can improve the
detection probability of the primary system by gathering
information from many nodes. However, a specific method is
not studied in conventional researches. In this thesis, at first,
wireless environment. In order to share the spectrum in the
presence of the PS, moreover, the transmit power of SS is
designed for avoiding the interference toward the PS. Next, a
relationship between a sensing ability of SS node and the
permissive transmit power of SS nodes is used for expanding
the cooperative sensing area, in which the sensing information
is gathered from surrounding sensing nodes without giving the
interference to the PS. Moreover, a novel channel selection is
proposed for improving the spectrum utilization by
characterizing the PS channel behavior with Markov chain
model. Finally, the dynamic spectrum access between the
secondary systems in the presence of the primary system is
considered. Computer simulation results confirm that the
proposed method can gather the information without
interference toward the primary system. Therefore this thesis
introduces the cooperative sensing in the cognitive radio with
sharing the spectrum of the primary system. Information
gathering methods which are needed for realizing the dynamic
spectrum access based on cognitive radio are proposed and
evaluated in this thesis.
Acknowledgements
This thesis is a summary of my doctoral study at the University of Electro-Communications, Tokyo, Japan. I am grateful to a large number of people who have helped me to accomplish my work.
First of all, I would like to express my deepest gratitude to my advisor, Associate Professor Takeo Fujii. His motivations and encouragements immensely helped me throughout my research.
It has been a pleasure working under his supervision. I would like to give my special thanks to Professor Yasushi Yamao and Assistant Professor Koji Ishibashi for their valuable guidance, instructions and continuous support. I would particularly like to thank Doctor Masayuki Ariyoshi, Mr. Kazushi Muraoka, Doctor Onur Altintas, Professor Yuji Oie, Professor Masato Tsuru and Assistant Professor Kazuya Tsukamoto for each joint research.
I am deeply indebted to the other members of this thesis committee: Professor Yoshio Karasawa, Professor Yasushi Yamao, Professor Sadao Obana and Doctor Masayuki Ariyoshi.
I would like to thank them for their valuable comments to improve my thesis and being part of the committee.
Thank also go to all the members of Fujii laboratory for their
useful discussions and kindness that I had while working
together with them. I am grateful to all of my friends who's
Last but not least, I would like to give special thanks to my
parents for their continuous support and encouragement, in my
graduate studies. Without these invaluable helps, this work
would have never been done.
Contents
List of Figures iv
List of Tables vii
1 Introduction 1
1.1 Cognitive Radio System . . . 1
1.2 Cognition Cycle . . . 3
1.3 Classifications for Cognitive Radio . . . 3
1.4 Spectrum Sensing and Issue . . . 5
1.5 System Model in this Thesis . . . 6
1.6 Contributions of this Thesis . . . 6
1.7 Structure of this Thesis . . . 7
2 Recent Trends of Cognitive Radio System 10 2.1 System Model . . . 10
2.2 Issues for Realizing Cognitive Radio System and Trends . . . 11
2.3 FCC Policy for Cognitive Radio . . . 12
2.4 Spectrum Sensing and Database . . . 14
2.5 Database in the Future . . . 15
3 Basics of Spectrum Sensing Techniques and Channel Selection 17 3.1 Individual Sensing Based on Energy Detection . . . 18
3.2 Cooperative Sensing Based on Energy Detection . . . 20
3.2.1 Cooperative Sensing With Combining Hard Information . 22 3.2.2 Cooperative Sensing With Combining Soft Information . . 23
CONTENTS
3.3 Characteristics and Comparison of Individual and Cooperative Sens-
ing . . . 24
3.4 Channel Selection in Cooperative Sensing . . . 26
4 Method of Simultaneous Information Gathering from Many Nodes 27 4.1 Motivation . . . 28
4.2 Orthogonal Frequency based Sensing Information Gathering Method 29 4.3 Characteristics of OF-SIG . . . 34
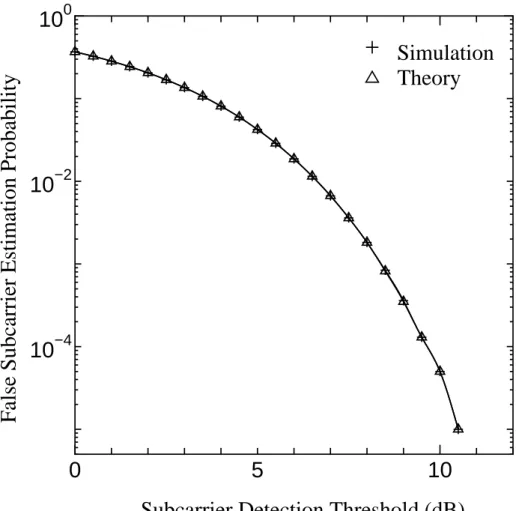
4.4 Theoretical Derivation of Subcarrier Detection Threshold . . . 36
4.5 Frequency Mapping Parameter . . . 38
4.6 Evaluation Results . . . 38
4.6.1 Evaluation Criteria . . . 39
4.6.2 Simulation Parameters . . . 39
4.6.3 Evaluation of Detection Parameters . . . 40
4.6.4 Primary Signal Detection Performance . . . 43
4.6.5 Cooperative Sensing Performance with Many Sensing Nodes 48 4.7 Conclusion . . . 51
5 Design of Transmit Power Derived from Aggregated Interference Power 52 5.1 Motivation . . . 52
5.2 Aggregated Interference Power by Using OF–SIG . . . 55
5.3 Evaluation Results . . . 60
5.3.1 Evaluation Criteria . . . 60
5.3.2 System Parameters . . . 60
5.3.3 Relationship between Secondary Transmit Power and Pri- mary SIR . . . 62
5.3.4 Tendency of Calculated Secondary Transmit Power . . . . 66
5.3.5 Primary Signal Detection Performance . . . 66
5.4 Conclusion . . . 72
CONTENTS
6 Iterative Sensing Method for Improving Sensing Ability 74
6.1 Motivation . . . 75
6.2 Relationship between Sensing Ability and Cooperative Sensing Area 76 6.3 Cycle of Iterative Sensing Based on Relationship between Sensing Ability and Cooperative Sensing Area . . . 78
6.4 Simulation Results . . . 85
6.5 Conclusion . . . 91
7 Channel Selection According to PS Channel Behavior Based on Markov Chain Model 92 7.1 Motivation . . . 93
7.2 Channel Selection for Control Information . . . 94
7.2.1 Architecture . . . 95
7.2.2 Characterization of Channel Occupancy Behavior . . . 96
7.2.3 Channel Selection and Channel List for Control Informa- tion Transmission . . . 99
7.3 Effect of Measurement Errors of Channel Selection . . . 102
7.4 Simulation Results . . . 104
7.4.1 Simulation Parameters and Indicative Probability . . . 104
7.4.2 Evaluation Criteria . . . 106
7.4.3 Channel Selection Performances Without Measurement Er- rors . . . 107
7.4.4 Channel Selection Performances With Measurement Errors 113 7.5 Conclusion . . . 120
8 Conclusions and Future Work 121 8.1 Summary of This Thesis . . . 121
8.2 Future Work . . . 123
Bibliography 125
Publications 129
List of Figures
1.1 Simple Cognition Cycle. . . 4
1.2 Structure of this thesis. . . 8
2.1 Registration and Access to White-Space Database. . . 14
3.1 Example of worse environment in individual sensing. . . 20
3.2 Transmission of sensing information at sensing nodes and decision at master node in cooperative sensing. . . 21
4.1 First phase: request of master node for cooperation. . . 30
4.2 Sensing information at sensing node. . . 30
4.3 Conversion sensing information to the subcarrier number of tone signal. . . 31
4.4 Second phase: reply to master node. . . 32
4.5 Image of received signal at master node. . . 32
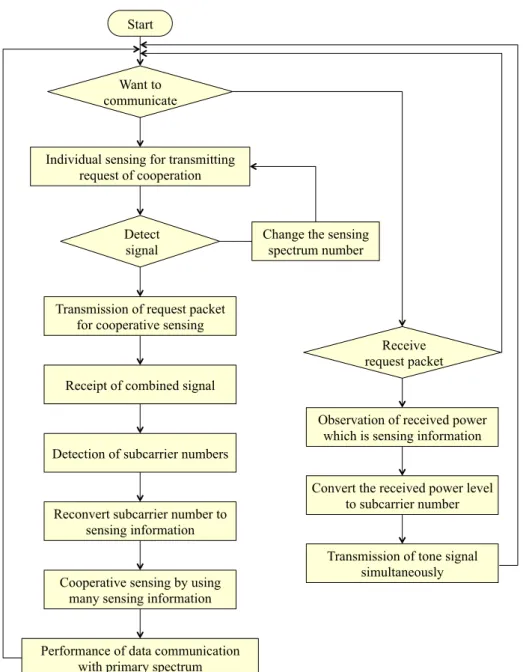
4.6 Flow chart in using OF–SIG at Secondary Node. . . 35
4.7 Primary user detection probability,Pd, versus SNR at master node. Primary average SNR of each sensing node is –15 dB. . . 42
4.8 False subcarrier estimation probability, Pf se, versus subcarrier de- tection threshold, γm, at master node. Primary average SNR of each sensing node is –15 dB. . . 44
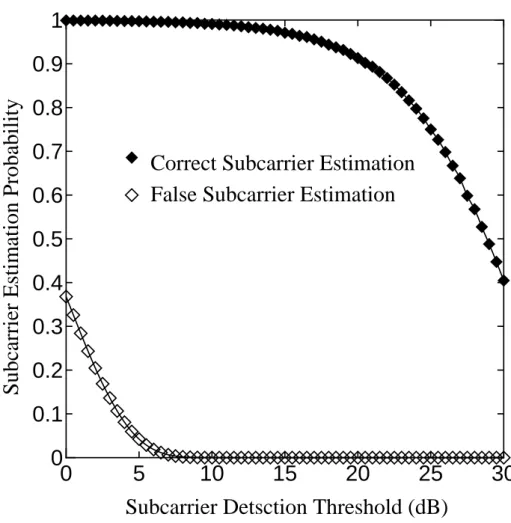
4.9 Correct subcarrier estimation probability, Pcse, and false subcarrier estimation probability,Pf se, versus subcarrier detection threshold, γm, at master node. Primary average SNR of each sensing node is –15 dB. . . 45
LIST OF FIGURES
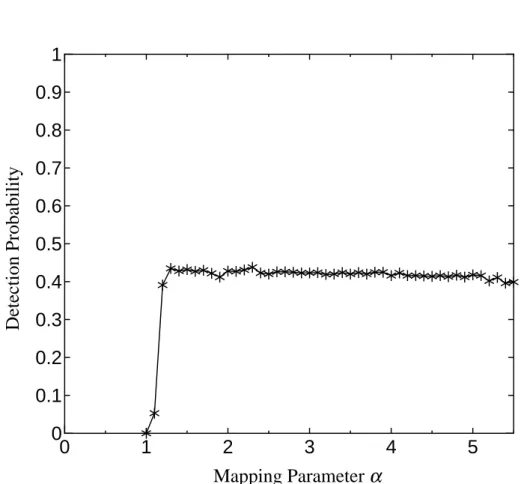
4.10 Primary user detection probability,Pd, versus subcarrier detection threshold,γm, at master node. Primary average SNR of each sens- ing node is –15 dB. . . 46 4.11 Primary user detection probability, Pd, versus mapping parameter,
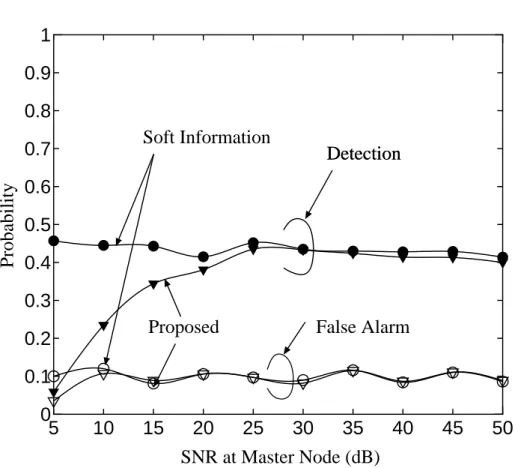
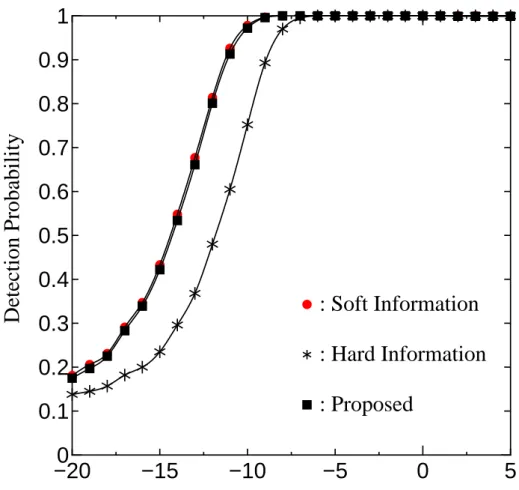
α. Primary average SNR of each sensing node is –15 dB. . . . 47 4.12 Detection Probability, Pd, of proposed cooperative sensing. Sub-
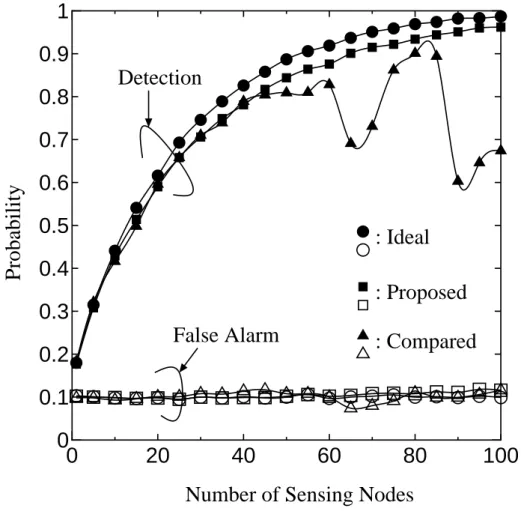
carrier detection threshold,γm, is 11.5 dB. . . 49 4.13 Primary user detection probability, Pd, versus number of sensing
node. Primary average SNR of each sensing node is –15 dB. . . . 50 5.1 Sensing nodes transmit sensing information simultaneously. . . 53 5.2 Image of interference toward primary system. . . 54 5.3 Image of primary transmitter, primary receiver and master node
location. . . 56 5.4 Primary transmitter, primary receiver and master node location
for simulation. . . 57 5.5 Secondary transmit power to keep SIR = 25 dB at primary receiver
on boundary of primary service area. . . 63 5.6 Number of average cooperative sensing nodes which transmits sens-
ing information from the inner cooperative sensing area. . . 64 5.7 Characteristics of secondary transmit power with a changing den-
sity of sensing nodes,ρ0 nodes/m2. Probability of false no cooper- ation,pf nc, is 0.01. . . 67 5.8 Characteristics of secondary transmit power with a changing prob-
ability of false no cooperation, pf nc. Density of sensing nodes, ρ0, is 0.005 nodes/m2. . . 68 5.9 Comparison of detection performance. Probability of false no co-
operation, pf nc, is 0.01 and density of sensing nodes, ρ0, is 0.005 nodes/m2. . . 69 5.10 CDF performance with the proposed method. . . 71 6.1 Relationship between interference at the worst case node and re-
quired received power at FC, whenPse is assumed constant value. 79
LIST OF FIGURES
6.2 Cycle of Iterative sensing method and design of transmit power for
sensing information. . . 81
6.3 Each area in the individual sensing stage and the first cooperative sensing stage–part1 and 2. . . 83
6.4 Performance of dsa and die. . . 87
6.5 The number of cooperative sensing nodes. . . 88
6.6 Sensing information exchange distance by γse. . . 89
6.7 Sensing information exchange distance by density of sensing nodes. 90 7.1 Structure of slot for secondary user. . . 95
7.2 Two–state Markov chain model. State of the PU is shown as ’OFF’ and ’ON’. . . 96
7.3 5 types of channel behavior for selecting DIC and CIC. . . 98
7.4 Flow chart of proposed channel selection method. . . 100
7.5 Average continuous WS slots for transmitting DI compared for the proposed methods, when the number of SU is 30. . . 108
7.6 Average continuous WS slots for transmitting DI compared for the proposed methods, when the number of SU is 60. . . 109
7.7 Average delay slots for transmitting CI compared for the proposed methods, when the number of SU is 30. . . 110
7.8 Average delay slots for transmitting CI compared for the proposed methods, when the number of SU is 60. . . 111
7.9 Average WS length in COR with error. . . 114
7.10 Average WS length in OBS with error. . . 115
7.11 Average WS length in COR and COR with errors. . . 116
7.12 The number of SUs in COR with error. . . 118
7.13 The number of SUs in OBS with error. . . 119
List of Tables
3.1 Characteristics of individual sensing and cooperative sensing. . . . 25
4.1 Simulation parameters for evaluating OF–SIG method. . . 41
5.1 System parameters for evaluating design of transmit power of sens- ing node. . . 61
6.1 System parameters for evaluating iterative sensing. . . 86
7.1 Summary of 5 types of channel behavior. . . 97
7.2 Simulation patterns for evaluating each error. . . 103
7.3 Simulation parameters for evaluating channel selection method. . 105
7.4 Indicative probability for channel selection. . . 105
7.5 Average success probability of CI transmission when the number of SU is 60. . . 112
Chapter 1 Introduction
This thesis shows studies on information gathering method under shared spec- trum in a cognitive radio. In this chapter, cognitive radio which is considered as fundamental system and structure of this thesis are described.
1.1 Cognitive Radio System
A cognitive radio concept was originally put forward by J. Mitola III and G.
Q. Maguire Jr. in 1999 [1]. Authors proposed a new system concept that can perform an intelligent communication, which is called a cognitive radio system.
The cognitive radio system is one of solutions for shortage of wireless resources caused by increasing users of the wireless communication.
Recently, users connected with wireless communication increase in whole of the world, because the wireless communication technology has rapidly developed in the past few decades and comes closer to people. However the number of users which can utilize wireless communication is restricted due to requirement of quality of service. Theretofore, many researchers have been attracted to increase throughput in a particular spectrum bandwidth, e.g., a multi-valued modulation method, a data compression method, a coding and so on. Moreover, wireless users have required great capacity and high speed for communicating with wire- less networks. That is to say, a relationship between the number of users and the throughput capacity is not poiseing. In addition, because of different character- istics of frequency, a range of wireless band that is suitable for wireless commu-
1.1 Cognitive Radio System
nication is limited. One resolution is that the range of wireless communication band is expanded by using some technologies, e.g., millimeter wave communica- tion and so on. The cognitive radio system has another approaches in comparing with these conventional approaches.
In the cognitive radio system, there are a primary system (PS) and a secondary system (SS). The PS is the existed system and has been assigned a dedicated spectrum. The SS does not have licensed spectrum. However the SS might be able to assign little spectrum, the assignable spectrum to the SS is little, because of the lack of the wireless resources and static-assigned spectrum by the law. For increasing the wireless resources practically, the SS requires new wireless communication technologies. It is the cognitive radio system, which is proposed by J. Mitola III and G. Q. Maguire Jr. [1]. The cognitive radio system can improve a spectrum utilization over the whole of the spectrum, which is suitable for wireless communication. In the cognitive radio system, an increase of the spectrum utilization is realized by secondarily using the assigned spectrum to PS or by using vacant spectrum as a guard-band interval. However, this secondary usage is carried out under conditions that no PS user communicates spatially and temporally.
Now, International Telecommunication Union Radio communications Sector (ITU–R) defines: the cognitive radio system is a radio system employing technology that allows the system to obtain knowledge of its operational and ge- ographical environment, established policies and its internal state; to dynamically and autonomously adjust its operational parameters and protocols according to its obtained knowledge in order to achieve predefined objectives; and to learn from the results obtained. In the cognitive radio system, the SS node which has intelligent radio autonomously communicates by recognizing the surround- ing wireless environment. As matters stand now, because the primary system has each dedicated channel, the SS node has to avoid interference toward the primary systems when it used the primary spectrum secondarily.
The next subsection explains a cognitive radio cycle briefly for autonomously performing intelligent radio.
1.2 Cognition Cycle
1.2 Cognition Cycle
Authors in [1] mentioned a cognition cycle to autonomously communicate by recognizing the surrounding wireless environment. Figure 1.1 shows the cognitive cycle which is simplified. In this cycle, the following performances are repeated for performing autonomous communication:
• Recognition: is to observe the surrounding wireless environment, for ex- ample, received power and received signal etc.
• Decision: is to judge present circumstances what are the best adaptation.
• Adaptation: is to change the radio system parameters according to wire- less environment.
• Communication: is to act with appropriate radio system parameters.
• Learning: is to learn change of wireless environment and individual act.
By repeating these steps, the SS node becomes smart to access to the wire- less channel. Therefore, the cognitive radio system has ability to improve the spectrum utilization.
In the cognitive radio system, the SS node communicates by secondarily using spectrum that is assigned to the primary system. In order to avoid interfering toward the primary system, the SS nodes recognize the surrounding wireless en- vironment repeatedly. In [1], these repetition is implied as a simplified cognition cycle, which is shown in Fig. 1.1.
1.3 Classifications for Cognitive Radio
The cognitive radio is roughly classified into two types,heterogeneous network and spectrum sharing network. The heterogeneous cognitive radio system switches and aggregates an appropriate system from many systems according to present wireless environment. The spectrum sharing system which is one of a dynamic spectrum access (DSA) is that the SS nodes secondarily utilize the assigned spectrum to the PS. In the DSA, whereas the SS nodes can improve the
1.3 Classifications for Cognitive Radio
Recognition!
Adaptation! Communication!
Decision! Learning!
Figure 1.1: Simple Cognition Cycle.
spectrum utilization by utilizing potential spectrum resource, the SS has to avoid the interference toward the PS in sharing the spectrum. This thesis focuses on the spectrum sharing in cognitive radio. The spectrum sharing system between a primary user and a secondary user is known as one of the cognitive radio systems.
It is because no spectrum is dedicated to SS and the PS has a priority right to use an assigned spectrum. In order to avoid interfering toward the PS, SS recognizes the surrounding wireless environment. In the cognitive radio system, such wireless environment recognizing technology is called as spectrum sensing.
In order to realize the cognitive radio system, spectrum sensing technologies are important [2]. If the spectrum is decided as idle, the spectrum hole is secon- darily used by SS communications. As in the case of this, the spatial and temporal vacant spectrum is called as a white space (WS). If the secondary system cannot decide the WS, the primary system will be influenced by the secondary transmit- ter. In this case, the secondary system cannot use the spectrum of the primary system because of the rights for the primary system. In order to surely detect the primary signals at the secondary system, the spectrum sensing technologies have been proposed, as will hereinafter be described in detail of kinds. By using the spectrum sensing, SS nodes decide whether the PS communicates over the channel or not. The spectrum sensing technologies have to have high detection ability in the realistic environment.
1.4 Spectrum Sensing and Issue
1.4 Spectrum Sensing and Issue
As previously mentioned, in order to realizing the spectrum sharing in the cogni- tive radio, the spectrum sensing technologies are very important. The spectrum sensing is categorized as the recognition in the cognition cycle as shown in Fig. 1.1.
When one SS node senses a spectrum of the primary system, a detection perfor- mance decreases due to wireless environment according to fading and shadowing influences. For improving the detection performance, many technologies were proposed in conventional researches. This thesis focuses on a cooperative sensing technique, which has a diversity effect by cooperating between many SS nodes.
The cooperative sensing can improve the detection performance by gathering the sensing information which is obtained by individual sensing result. However, in conventional researches, one by one the secondary node transmits the informa- tion by packetizing the sensing information. In this case, it takes long time to gather information from many SS nodes. In this way, the conventional researches was not considered as a practical method for gathering the sensing information which aims at gathering efficiency. Therefore, this thesis proposes a novel sens- ing information gathering method by using orthogonal signal, which can gather information from many SS nodes at the same time.
In the spectrum sharing, because many secondary nodes transmit the sensing information, the secondary system should consider a spectrum utilization for sat- isfying transmission demand of a data information. If the spectrum utilization is improved, the limited spectrum resources can be effectively used for commu- nicating between SS nodes. In order to improving the spectrum utilization, an appropriate channel selection method according to kinds of data is also impor- tant. When the SS nodes use the vacant spectrum randomly for transmitting the control information, another SS nodes may be cannot communicate with WS which is suitable for the data information transmission. In this field, for exam- ple, the control channel is selected as the channel of low occupancy ratio. The channel occupancy ratio indicates a channel vacant ratio. However the length of continuous white space is unknown in this case. Therefore, the long–term white space will be fragmented by transmitting the control information from many SS nodes according to channel selection method, and a data information cannot be
1.5 System Model in this Thesis
transmitted by using long–term white space channel. Then, this thesis discusses the appropriate channel selection method for the control channel and the data information transmission.
1.5 System Model in this Thesis
This thesis assumes different system models in Chapt. 4 to Chapt. 6 and Chapt. 7 respectively. In Chapts. 4 to 6, there are one primary channel and many secondary nodes. One master node gathers the sensing information from many sensing nodes for cooperative sensing. These sensing nodes are located in a cooperative sensing area that the master node can receive the sensing information. The number of secondary nodes depends on a node density and the node location is uniform distribution. In Chapts. 4 and 5, the master node and many sensing nodes know which channel is used for transmitting the sensing information. In Chapt. 6, at least the master node knows the channel number used for transmitting the sensing information of each sensing node.
On the other hand, Chapt. 7 considers many primary channels. The secondary nodes select one channel from available primary channels, then the secondary nodes broadcast the surrounding information. Each secondary node transmits the information on each timing. In Chapt. 7, an assumption is no packet collision by using sensing before transmission of the information.
In this way, this thesis considers each system model in each chapter.
1.6 Contributions of this Thesis
As previously mentioned, the secondary system has to avoid interfering toward the primary system. In order to detect these spaces with accuracy, it is important to have a very efficient method, which gathers the surrounding information from many SS nodes. Here SS nodes require the frequency resources to transmit the information. In conventional researches, many researchers consider that the SS provides the channel to transmit the surrounding information, e.g., control in- formation, network information, channel state information and etc. The channel is called as a control channel and is a common channel among many SS nodes.
1.7 Structure of this Thesis
However, this assumption is not realistic, because the spectrum resources become shortage. In order to realize such a dynamic spectrum access with existents of the primary system, the secondary system has to exchange information of surround- ing wireless environment between the secondary systems. On the other hand, this thesis describes the method which is suitable for practical use in the spectrum sharing environment. In order to realize the practical use of the PS spectrum, this thesis consider sharing the spectrum in transmitting not only the data in- formation but also the surrounding information. In this case, key points are an avoidance of interference toward the primary system whose location is unknown and a gathering information from many SS nodes in a short time. The proposed method in this thesis can achieve these points at the same time by using an or- thogonal narrow band and designing a transmit power for transmitting sensing information. Moreover, in sharing the spectrum of the primary system, this the- sis mentions that iterative sensing method can increase the number of SS nodes which can transmit the information from a distant location. Finally, by repre- senting the channel selection method, the secondary system can perform not only control information transmission but also data information transmission. These researches in this thesis can realize the practical wireless resources are increased and intelligent radio.
1.7 Structure of this Thesis
Figure 1.2 shows the structure of this thesis.
The thesis consists of seven chapters as follows:
Chapter 1This chapter introduces a fundamental cognitive radio system and simple cognition cycle.
Chapter 2 Recent trends in the world are described in this chapter, in par- ticular in USA. In USA, the cognitive radio system is putting into practical use by using TV bands as the primary system.
Chapter 3 In order to realize the spectrum sharing which is one category of the cognitive radio system, the spectrum sensing techniques are very important.
1.7 Structure of this Thesis
Recent Trends of Cognitive Radio System! Chapter2!
Basics of Spectrum Sensing Techniques and Channel Selection! Chapter3!
Method of Simultaneous Information Gathering from Many Nodes! Chapter4!
Design of Transmit Power Derived from Aggregated Interference Power! Chapter5!
Iterative Sensing Method for Improving Sensing Ability! Chapter6!
Channel Selection According to PS Channel Behavior
Based on Markov Chain Model! Chapter7!
Conclusions and Future Work! Chapter8!
Introduction! Chapter1!
1.7 Structure of this Thesis
This chapter explains the spectrum sensing techniques based energy detection, which are an individual sensing and a cooperative sensing methods. In particular, this thesis focuses on the cooperative sensing, which can increase signal detection probability by gathering the surrounding information. In addition, this thesis explains about the channel selection for effectively using the spectrum in sharing.
Chapter 4This chapter is attracted to practical information gathering method in the cooperative sensing without common channel. A novel sensing information gathering method is proposed and is called as OF–SIG (Orthogonal Frequency based Sensing Information Gathering) method. The sensing information gather- ing method is needed for performing the cooperative sensing.
Chapter 5In the realistic environment, the SS has to protect the PS, which is unknown their location. In order to avoid interfering toward the PS, this chapter analytically designs the transmit power of the sensing node for transmitting the sensing information with OF–SIG method.
Chapter 6 In limiting the power for transmitting the surrounding informa- tion, the number of sensing nodes and a sensing area are also limited. This chapter considers that the number of the sensing nodes increases by iterating the sensing for expanding the sensing area in this chapter.
Chapter 7 For realizing the cognitive radio, control information must be ex- changed among the secondary system nodes. However, unlike previous studies, the secondary system considers about not only the control information transmis- sion but also a data information transmission. Therefore this chapter describes the channel selection statistics for the control information.
Chapter 8 Finally, this chapter summarizes this thesis and mentions the future works.
Chapter 2
Recent Trends of Cognitive Radio System
This chapter explains issues for realizing the cognitive radio and introduces the recent trends of the cognitive radio system in the world. International Telecom- munication Union Radio communications Sector (ITU–R) performs a standard- ization and a recommendation for wireless communication in the world around.
ITU–R holds the World Radio communication Conference (WRC), and modifies Radio communication Rule (RR) which decides a wireless frequency allocation and bandwidth and so on. Some countries have the similar organization for pro- viding wireless communication service in each country, e.g., Federal Communica- tions Commission (FCC) is an independent agencies of the US government, Min- istry of Internal Affairs and Communications (MIC) is a cabinet–level ministry in the Government of Japan, Office of Communications (Ofcom) is the government–
approved regulatory and competition authority of the United Kingdom. People in each country follow each authority–defined rule for providing the service with wireless communications in each country.
2.1 System Model
In the cognitive radio system, SS detects spatial or temporal WS and utilizes the WS secondarily without giving interference to PS. In almost all spectrum sharing researches, spatial and temporal WS are considered separately. When the SS uses
2.2 Issues for Realizing Cognitive Radio System and Trends
the spatial WS, the spectrum sharing is realized by that the SS knows the PS service area and the PS’s location and communication parameters. In this case, the SS can utilize the spatial vacant spectrum without giving the interference toward the PS. However, this secondary utilization needs the PS cooperations, e.g., the PS registers own communication parameters on database. If the PS communicates for long hours such as TV broadcast and uses the different channel according to local broadcast station, such spatial WS utilization is useful. In this case, if the PS cooperates for spectrum sharing, the SS can use the spatial WS relatively simple without interference toward the PS by using a database and so on.
On the other hand, when the SS uses the temporal WS, not only the PS’s communication information but also real–time surrounding information by using a spectrum sensing technique are needed for secondarily communicating without interference toward the PS. In this case, it is very important that the SS nodes gather the surrounding information from many other SS nodes in the cognitive radio system. It seems that this temporal WS utilization is more difficult than the spatial WS utilization from the aspected of required techniques. Therefore, recent trend in the world is the realization of spectrum sharing by the spatial WS and the database.
However, utilization of not only the spatial WS but also the temporal WS will be needed in the future. Thus this thesis focuses on the spatial information gathering method in Chapts. 3– 6 and the channel selection method by using temporal WS information. At first, the next section mentions the recent trends in the world about realization the spectrum sharing in the cognitive radio system.
2.2 Issues for Realizing Cognitive Radio System and Trends
In current trend in research on cognitive radio, it is required to share the same spectrum of an existing system and a new system. The new system utilizes a licensed spectrum that is assigned to the existing wireless system previously.
Therefore, an avoidance of interference toward the existing system is the most
2.3 FCC Policy for Cognitive Radio
important issue. Because the existing systems have priority over the new systems, the new systems must protect the existing systems in communicating by using the licensed spectrum secondarily.
In USA, Japan, UK, South Korea and so on, the realization of the cognitive radio is now being discussed. These countries have targeted guard bands of TV bands as an available white space. However, not only TV broadcasts but also the unlicensed wireless microphone exists in these bands. Because the signal of the wireless microphone is smaller than TV broadcasts, it is difficult for secondary system to detect these signals. Moreover, the existing systems desire more sensi- tive signal detection method. Therefore, agencies of each country are considering the utilization of database as well as spectrum sensing. In this case, the database registeres information of the surrounding wireless environment, that is observed from many sensing nodes by the spectrum sensing, and the PS’s communica- tion parameters. Now FCC in USA has started field experiment and is testing prototype database toward the realization of the cognitive radio.
2.3 FCC Policy for Cognitive Radio
In USA, FCC decides the rule about wireless communications to practically use.
FCC is able to put a cognitive radio system by using TV bands into practical use in a few years. Because USA has a vast rural area of land, they said there is a potential white space which is about 90 percentage of all band width assigned to the PS. In addition, the TV bands have wide band width, the transmitter of TV is fixed, and they can obtain a list of an authorized services in the TV bands. Therefore FCC has the plan to put into practical use TV bands by using the cognitive radio technologies. An unlicensed system (secondary system) uses broadcast spectrum with low transmission power at locations and times when the TV broadcast spectrum is not being used.
In the FCC’s report and order for unlicensed operations in the TV broadcast bands (white spaces order), the rules to enable white space device to operate in the spectrum is established. FCC expects two types of secondary systems, fixed device and personal portable device. These devices have some restrictions
2.3 FCC Policy for Cognitive Radio
for preventing harmful interference toward the TV broadcast devices and wire- less microphones and sharing the TV bands among the unlicensed systems, e.g., transmission power level and use of database. For example, the fixed white space devices operate in the digital television transition channels, except channels 3, 4, and 37 for radio astronomy, and is limited maximum transmit power to 1 Watts.
The personal potable white space devices use any unoccupied channel between 21 and 51 except channel 37 at up to 100 milliwatts of power. In the TV service area and surrounding area, TV channels and adjacent channels cannot be used for being operated the fixed devices and must be limited to 40 milliwatts for personal potable devices. In addition, both fixed and personal potable devices have to be capable of sensing TV stations and wireless microphones. These white space devices need to equip some conditions and to be authorized from FCC. The equipment is as follows:
⟨ Mandatory⟩
• The white space devices has a geo-location capability.
• The white space devices has provisions to access over the Internet a database of primary services parameters in the TV bands at its location and com- munication parameters of the surrounding fixed white space devices.
⟨ Optional ⟩
• The white space devices has detection capability whether a channel is oc- cupied or unoccupied (spectrum sensing).
In the FCC’s rule, the unlicensed secondary system must access to the database for deciding the available spectrum assigned to the licensed existing system. The databases are registered multiple information of TV stations, wireless microphone and so on, as shown in Fig. 2.1. Additionally, a degree of accuracy of geo-location is [-50m, +50m]. The mobile devices must update every 60 seconds, database access is on startup, everyday and each time these devices move. The fixed devices must register their operation to the database. From these ways, FCC intends to protect the existing system from harmful interference which is caused by secondary utilization of the licensed spectrum.
2.4 Spectrum Sensing and Database
Primary System!
- Geo-location: x, y - Frequency: f0, f11, f47 - Max transmit power: z dBm - Modulation method: 16QAM ---!
database! Registration of Parameters!
Recognition of Available Spectrum!
Secondary System!
Figure 2.1: Registration and Access to White-Space Database.
FCC decides 10 companies (Google, Airity, Comsearch, Frequency Finder, K.
B Enterprises, Key Bridge Global, Neustar, Spectrum Bridge, Telcordia Tech- nologies, LS telecom, Microsoft) as white-space database provider in 2011. The FCC performed first official test of white-space database for 45 days from Sept.
19, 2011. In the first test, Spectrum Bridge was designated as a database op- erator. Additionally, first white space device of Koos Thechnical Services is ap- proved from the FCC. The FCC approves Telcordia Technologies as the database operator for the second database test, which confirms whether the unlicensed sys- tem can recognize an available spectrum with accuracy by using the white-space database. Now, the approval is relegated to Wilmington, North Carolina and the surrounding area initially. As just described, the cognitive radio system is putting into practical use in USA.
2.4 Spectrum Sensing and Database
As previously mentioned, in the FCC’s rule, the unlicensed users must access to the white-space database which registers multiple information of the existing sys- tem. The FCC forces on the white space devices to access to the database which
2.5 Database in the Future
is included with communication parameters and location of TV broadcast station and the surrounding fixed white space devices. These decisions or multiple infor- mation of each unlicensed users is very important for autonomous decentralized control in the cognitive radio system. For realizing the autonomous decentral- ized cognitive radio, these data should be updated to a database in each time.
From this way, the unlicensed users can refer to the latest information of the sur- rounding wireless environment. In this case, it is a problem that the unlicensed users have to connect the internet for accessing to the database and it requires spectrum resources even if the wireless resources are shortage. However, in the future, the unlicensed users will communicate by deciding the surrounding wire- less environment. The unlicensed users require the spectrum sensing technology for autonomous decentralized spectrum sharing. This thesis considers that the unlicensed users transmit multiple information with sharing the spectrum with the licensed system.
2.5 Database in the Future
By using the database included with information of the surrounding primary sys- tem, the secondary system can secondarily utilize the primary spectrum without harmful interference to the primary system. In order to put into practical use the cognitive radio, the FCC says it is very important technology that the effective database constructs. When the database is used for avoiding interference toward the primary systems and sharing the spectrum among the secondary systems, multiple variable information composes the database. In the case that the only TV band is objective, the information composed the database is assumable. How- ever, in the future, the primary system becomes wide variety. Thus, the database is required huge capacity and ability of processing of an enormous volume of raw data. In addition, in order to use information of the database, the secondary nodes access to the database on the shared channel or a dedicated common chan- nel. In the shortage of wireless resources, it is not realistic that many secondary systems access to the database.
Moreover, many researchers consider the environment that there is a primary system whom the spectrum is shared with many secondary systems. Such envi-
2.5 Database in the Future
ronment may come in the near future, but a spectrum sharing environment in long-term future is expected that there are only secondary systems which have a priority to access to the channel. In this case, it is not realistic that all sys- tems register their information on the database or it is difficult to get all users to register even if the users are fixed at any location. Therefore, the cognitive radio system is expected to be realized in incremental steps. At first, a specified primary system such as using the TV bands is objective to share the spectrum with the unlicensed systems by using the database and equipping the carrier sense ability and the geo-location capability and so on.
Next step, all systems have a priority to use the spectrum, that is, no types is the primary and the secondary system, in particular, the emergency wireless communication has high priority. Final goal is all wireless users can communicate autonomous decentralized by using various frequencies without interference to each other users. Therefore, even if the database does not need for the cognitive radio system, the wireless devices in the future become hungry for information of the surrounding environment which is given by the spectrum sensing.
As explained above, the spectrum sensing techniques are very important for realizing the cognitive radio system which is autonomous decentralized control.
In any case, the spectrum sensing is effective for recognizing the surrounding wireless environment.
Chapter 3
Basics of Spectrum Sensing Techniques and Channel
Selection
In the spectrum sharing, the cognitive secondary users can utilize the spectrum allocated to the primary users when the primary users do not use the same fre- quency spatially or temporally. In order to realize such primary and secondary system, the interference toward the primary users from the secondary users should be minimized by recognizing the surrounding radio environment. Therefore, sec- ondary users must exactly decide the presence or absence of primary users. Such observation is known as spectrum sensing techniques. Many kinds of spectrum sensing techniques have been proposed for detecting the presence of primary sys- tem [4]–[5]. Representative examples are shown in:
• A spectrum sensing based on energy detector detects signal by comparing a threshold with the received power as explained in [3].
• A cyclostationary based spectrum sensing detects by using the unique pe- riodic regularity to signal of communication as shown in [4].
• Last one is covariance based signal detection as shown in [5].
This thesis focuses on the energy detection based spectrum sensing. The reason is that the energy detection is simpler implementation and adequate performance
3.1 Individual Sensing Based on Energy Detection
than another spectrum sensing techniques.
This chapter introduces fundamental sensing method based on energy detec- tion. Section 3.1 explains a individual sensing based on the energy detection. In the individual sensing, the detection results are affected by locality of wireless en- vironment, e.g., fading and shadowing. Then, in Sect. 3.2, a cooperative sensing techniques are described as method which can improve the detection performance by exchanging surrounding information among SS nodes. Characteristics of the individual sensing and the cooperative sensing are shown and comparison between these sensing methods is mentioned in Sect. 3.3. In addition, Sect. 3.4 mentions about channel selection for the cooperative sensing in sharing the spectrum with the primary system.
3.1 Individual Sensing Based on Energy Detec- tion
First, this section briefly introduces the fundamental individual sensing method for detecting the signals of a primary system on the basis of the energy detection method.
The energy detector decides the presence of unknown signals after comparing two hypotheses. One hypothesis is H0, which implies that the primary user is absent (only noise), and the other is H1, which implies that the primary user is present (signal plus noise). These hypotheses can be written as follows [6]:
H0 : xi = 1 N
N∑i−1 n=0
|w[n]|2
H1 : xi = 1 N
N∑i−1 n=0
|As[n] +w[n]|2 .
(3.1)
Here the noise is w[n] of the n th sample, and As[n] is the received signal of the n th sample when the primary transmitter transmits the signal s[n] with a channel gain ofA. And iis the sensing node index, Ni is the number of samples of the ith sensing node. With detecting the signal, the cognitive secondary user
3.1 Individual Sensing Based on Energy Detection
compares a detection threshold for the individual sensing, γis, with the received power level, is given by:
xi > γis . (3.2)
If the received power level is larger than the threshold, the secondary user decides some signal, i.e., the secondary user gives up using the spectrum and move to next channel which is likely to secondarily use.
The probability of precisely detecting the presence of a primary user is denoted by the detection probability, Pd. On the other hand, when the primary signal is not transmitted from the primary transmitter, the receiver (secondary sensing terminal) wrongly decides that the signal is transmitted. The probability of the above wrong detection is expressed as a false alarm,Pf a. If the probability of false alarm,Pf a, is high, it means that the secondary user is loss the opportunity to use usable vacant frequency of primary user. Therefore the results are desired to be high the probability of detection, Pd, keeping low Pf a to improved the efficiency to use spectrum.
The detection ofH0 and H1 is distinguished by using the detection threshold for the individual sensing, γis, which is decided considering the noise level of the node [7]. Therefore, the detection function is written as:
Pf a =
∫
P(xi > γis|H0)dxi . (3.3) When the desiredPf a is decided, the detection threshold for the individual sens- ing, γis, can be derived from Eq. (3.3), which is given by:
γis =
√2
Nσ2erf c−1(2Pf a) +σ2 . (3.4) Whereas, as previously mentioned in this chapter, the energy detector is that its implementation is simple and its performance is adequate, there is the prob- lem that the received power level is influenced by unpredictable change for a shadowing or fading. In this case, the detection probability of the presence of primary user is low under the worse SNR (Signal-to-Noise Ratio) environment, as shown in Fig. 3.1. Therefore, in order to improve the detection probability, a cooperative sensing techniques have been proposed [8], [9]. These hypotheses as shown in Eq. (3.1) can also be applied to cooperative sensing by using the sensing
3.2 Cooperative Sensing Based on Energy Detection
information from surrounding multiple sensing nodes. In the cooperative sensing method, the sensing information must be gathered from the surrounding nodes.
!!
Primary
Transmitter ! Secondary System !
Figure 3.1: Example of worse environment in individual sensing.
3.2 Cooperative Sensing Based on Energy De- tection
The cooperative sensing technologies, in which the sensing results of the sur- rounding nodes are used for decision of the existence of the primary system, have attracted attention because the cooperative sensing has tolerance to the fading and the shadowing environment. Many techniques using cooperative sensing have been proposed [10]–[15]. In this section, the sensing methods which is known as the cooperative sensing is explained. Cooperative sensing detects the existence of the primary users by using the plural nodes for mitigating an influence of lo- cal fading and shadowing, which decrease the detection probability by using the individual sensing of each node.
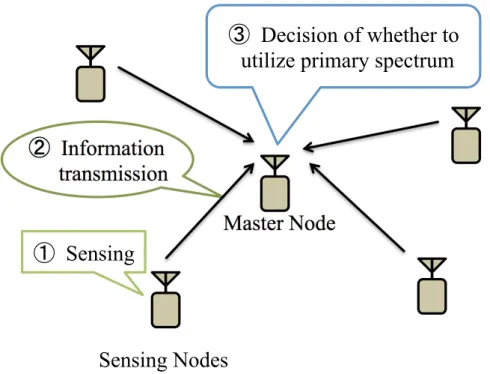
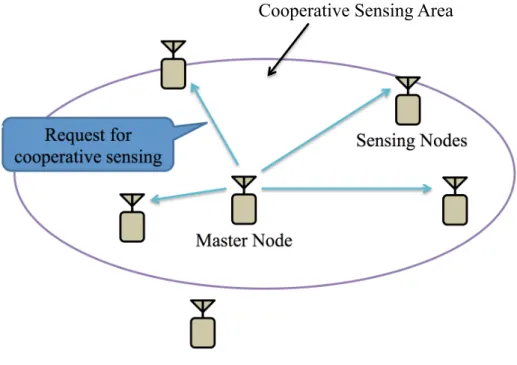
The secondary nodes switch between a master state and a sensing state. When the secondary node desires to utilize a spectrum of the primary system, the sec- ondary node is called as a master node, which gathers the sensing information
3.2 Cooperative Sensing Based on Energy Detection
from the surrounding secondary nodes. In this time, surrounding another sec- ondary nodes perform the spectrum sensing and transmit one’s own sensing infor- mation to the master node, and then the secondary nodes are called as a sensing node. The master node finally decides whether the primary spectrum can be utilized or not, as shown in Fig. 3.2.
! Information transmission !
Master Node !
Sensing Nodes !
" Decision of whether to utilize primary spectrum !
# Sensing !
Figure 3.2: Transmission of sensing information at sensing nodes and decision at master node in cooperative sensing.
In the cooperative sensing, final decision at master node is classified into two main types; a hard decision and a soft decision. The follows are briefly explained about these types;
Hard decision: uses a hard information which is binary data. in this case, each sensing node converts observation value, which is given by performing individual sensing at each secondary sensing nodes, into the binary data, e.g., 0 and 1.
Soft decision: uses a soft information which is raw data which is observed at each sensing nodes. Next subsection explains about each cooperative sensing.
3.2 Cooperative Sensing Based on Energy Detection
3.2.1 Cooperative Sensing With Combining Hard Infor- mation
In the hard information based cooperative sensing, the exchanging information is transfer to binary at each sensing node and only the binary detected data are gathered from the sensing node to the master node. Each sensing node observes the received power of primary user, and the secondary node individually decides the presence of the primary user by using Eq. (3.1). For example, the detection statistic can be newly written as:
H0 : bi = 0
H1 : bi = 1 , (3.5)
where bi denotes the test statistic of the i th sensing node. After these sensing nodes transmit the sensing information, the master node decides the presence of the primary signal. The decision function with hard information can be written
as: ∑I−1
i=0
bi > γh . (3.6)
In the case that the detection threshold for the hard information based cooper- ative sensing, γh, is zero, this counting rule is called as OR rule [10], [11]. In addition, if the detection threshold for the hard information based cooperative sensing,γh, is decided as the value more than zero, the counting rule is called as AND rule [9]– [11].
The OR rule has a high missing rate, which means that the master node misses chance to use the primary spectrum, because the master node decides if at least one sensing node detects signal. Therefore, the primary system can protect in a higher rate, while the OR rule is overprotective detection rule. On the other hand, in the AND rule, the relationship between the utilizing chance and the avoidance of interference toward the primary system is balanced by deciding the appropriate threshold. However, because these hard information based cooperative sensing reduce the accuracy of the observed value to the binary value, the detection probability of signal is degraded. In contrast, it is advantage that the data volume of sensing information is low in these hard information based cooperative sensing.
3.2 Cooperative Sensing Based on Energy Detection
3.2.2 Cooperative Sensing With Combining Soft Informa- tion
In the soft information based cooperative sensing, after each sensing node observes the received power, the reported value which is sensing information is transmitted to the master node without making any decision. The master node finally decides whether the primary spectrum is occupied or not by observing the received sensing information. The cooperative sensing statistic by using energy detection can be written as:
H0 : x = 1 N I
I−1
∑
i=0
xi
= 1
N I
I−1
∑
i=0 N∑i−1
n=0
|wi[n]|2 H1 : x = 1
N I
I−1
∑
i=0
xi
= 1
N I
I−1
∑
i=0 N∑i−1
n=0
|Aisi[n] +wi[n]|2 .
(3.7)
Here i is the node index number, I denotes the total number of sensing nodes, xi is the test statistic of the i th node, and x is the total test statistic of the cooperative sensing at the master node. wi[n] denotes the noise of the n th sample at the i th sensing node, Aisi[n] shows the amplitude of the received signal when a transmitter transmits a signal, si[n], with channel gain Ai, Ni is the number of samples of the i th node,N is the number of all samples.
The detection function of the presence of the primary user can be written as follows:
x > γcs . (3.8)
If Eq. (3.8) is true, the master node decides that the primary spectrum is occupied. The detection threshold for the cooperative sensing, γcs, is decided to satisfy Pf a as shown in [12] and is given by:
Pf a =
∫
P(x > γcs|H0)dx . (3.9) In general, in order to keep the number of the communication chances of the secondary system, the secondary system often assumes that Pf a equals to 0.1.
3.3 Characteristics and Comparison of Individual and Cooperative Sensing
3.3 Characteristics and Comparison of Individ- ual and Cooperative Sensing
This section shows the characteristics and comparison of the individual sensing and the cooperative sensing and introduces sensing methods based on cooperative sensing combining soft information or hard information. Table 3.1 shows the characteristics according to these sensing methods.
The individual sensing performance is lower than the cooperative sensing per- formance. The reason is that the secondary node must detect the primary signal by oneself in the individual sensing. In this case, the observed results are affected by locality of wireless environment, i.e., fading and shadowing. In order to decay these influences of the observed results, the cooperative sensing is performed by many secondary nodes. Therefore, the cooperative sensing techniques have been proposed [13]–[15]. However these methods require a lot of bits for transmitting the sensing information from the sensing node to the master node. Thus, in order to keep amount of bits of the sensing information with transmitting to the master node, the hard information based cooperative sensing method has been proposed.
As previously mentioned, the hard information based cooperative sensing can reduce the transmitted information between the sensing node and the master node because the result of individual sensing is exchanged with binary data. In the hard information based cooperative sensing, only one bit is required in each sensing node for transmitting the information to the master node. However, be- cause the sensing information is too little to decide the presence of the primary system with accuracy, the cooperative sensing with using hard information has low performance. That is to say, the amount of the bits for the sensing informa- tion and the accuracy of the detection of the primary signal are the trade–off.
Then, the next chapter proposes a novel method decreasing the amount of the transmitted information with keeping the performance of the soft information based cooperation sensing.
3.3 Characteristics and Comparison of Individual and Cooperative Sensing
Table 3.1: Characteristics of individual sensing and cooperative sensing.
Kinds of Sensing Transmitted data
Advantages Disadvantages
Individual Sens- ing
Nothing SS node does not transmit information.
Detection perfor- mance is easily influenced by wireless locality.
Cooperative Sensing based on Hard Infor- mation
Binary data
Transmitted informa- tion is reduced.
Amount of bits is lit- tle.
Cooperative Sensing based on Soft Informa- tion
Observed data
Detection perfor- mance is high.
Amount of bits is large.
3.4 Channel Selection in Cooperative Sensing
3.4 Channel Selection in Cooperative Sensing
In addition, when the SS shares the spectrum with primary system, it is necessary to select the channel from many primary channels. For example, in order to increase the chance of communication, the SS node desires low occupancy channel, which is often idle. In this case, when the SS node transmits a little amount of information with such channel, the low occupancy channel becomes busy for a moment. If another SS nodes want to transmit a large information, the channel which is suitable for transmit the information might be busy due to the little information.
In the cooperative sensing, the secondary nodes transmit the sensing infor- mation periodically for updating information. In general, a packet length of the sensing information is shorter than that of the data information. Because a long–term WS will be suitable for transmission of the data information, it is important for SS nodes to select the channel for transmitting the little amount of information. In this thesis, Chapt. 7 focuses on the channel selection method.
Chapter 4
Method of Simultaneous
Information Gathering from Many Nodes
In this chapter, a new method for gathering information from many secondary nodes to master detection node is proposed. The cooperative sensing requires exchanging the observed information like the detected primary user’s signal level at each sensing node to the master detection node. However, conventional co- operative sensing techniques have considered information exchange methods by using a packet communication. In this case, it takes long time for gathering the information from many sensing nodes because of avoidance of packet collisions.
Therefore, this chapter focuses on the method which can gather the information at the same time.
Information gathering method based on mapping the information to a sub- carrier signal of an Orthogonal Frequency Division Multiplexing (OFDM) signal structure for reducing the required information symbols for the cooperative sens- ing. Final subsection confirms that the proposed method obtains almost the same sensing performance compared to the soft information based cooperative sensing with perfectly exchanging the observed information.
This chapter is organized into 7 sections. At first, Sect. 4.1 describes a moti- vation of the proposed sensing information gathering method from many sensing nodes at the same time. Section 4.2 proposes the OF–SIG method, and Sect. 4.3
4.1 Motivation
indicates characteristics of the proposed OF–SIG method. Then, threshold for detecting the subcarrier number in the OF–SIG method is mentioned Sect. 4.4.
When the sensing information is converted to the subcarrier number, the sensing node uses a frequency mapping parameter, which decides detection performance at the master node. The detail of mapping parameter is discussed in Sect. 4.5.
Section 4.6 shows the simulation results by comparing the conventional perfect soft information based cooperative sensing method and hard information based cooperative sensing method with OR rule. Finally, Sect. 4.7 concludes this chap- ter.
4.1 Motivation
Almost all cooperative sensing methods assume the sensing information is per- fectly exchanged among nodes. In realistic environment, the sensing information should be exchanged among nodes by using some information exchange methods.
Although a simple information exchange method can be realized by using packet communication among nodes, the header of a packet occupies the channel and some collision avoidance methods among secondary nodes are required. These redundancies degrade the total secondary system performance. In order to solve the information exchange problem of the cooperative sensing, this chapter pro- poses a novel information exchange method based on mapping the information to a subcarrier signal of an OFDM signal structure. In the proposed method, the sensing result of each cooperative secondary node is converted to the subcar- rier number of OFDM signal. Then the secondary sensing nodes simultaneously transmit a tone signal at the selected subcarrier. The transmitted tone signals have subcarrier components at the selected subcarriers. These combined tone sig- nals are received at the master sensing node and the subcarriers have energy more than a certain threshold. The subcarrier number information can be recovered to the sensing results of the surrounding sensing nodes. Finally, a cooperative sensing processing is performed at the master node for detecting the presence of the primary signal.
In this chapter, the primary system consists from one primary transmitter and many primary receivers, which exist within primary service area such as TV