原
著
<Contribution>Three-dimensional motion analysis of upper limb in basketball shot, by Masaki HOKARI, Hitoshi DOKI, & Tsuyoshi Saito.バ ス ケ ッ トボ ー ル ・シ ュ ー トに お け る 上 肢 の 三 次 元 運 動 解 析*
穂 苅 真 樹**,***,土 岐 仁***,齋 藤 剛***
This paper describes a new method to measure and analyze three-dimensional
rotation and
trans-lation analysis of upper limb in basketball shot form. In general, the shot form is measured by taking
the photograph of motion with the high-speed camera and/or video camera and analyzing the
photo-graph with direct linear transformation
method (DLT method).
The suggesting measurement method
was derived by the kinematic human body model analysis. The measurement
system developed by
using the three dimensional rate gyro sensors set at the several body positions can measure the three
dimensional rotations and the three dimensional translations of various parts of body. By using this
system, the motion of a thin part such as wrists and ankles can be measured easily. In addition, this
system can measure the basketball shot forms of various players correctly.
本 論 文 は,バ ス ケ ッ トボ ー ルの シュ ー トフ ォーム にお け る上 肢 の 三次 元 回転 ・並 進 運 動 を計 測,解 析 す る た めの 新 しい手 法 につ い て述 べ る.一 般 に,シ ュー トフ ォー ム は高 速度 カ メ ラや ビデ オ カ メラ でそ の動 き を 撮 影 し,撮 影 され た映 像 をDLT法 で分 析 す る こ とに よ つて計 測 され る.提 案 す る計 測 法 は運 動 学 的 人体 モ デ ルの 解析 に よ り導 き出 した.身 体 各部 位 に設 置 した三 次元 ジ ャ イロ セ ンサ を使 用 し開 発 した計 測 シス テム は様 々な 身体 部 位 の三 次 元 回転 ・並 進運 動 を計 測 す る こ とが で きる.こ の シ ステ ム を用 い る こ とに よ り,手 首 や足 首 の よ うに細 い 部位 の運 動 も簡単 に計測 す る こ とが で きる.さ らに,こ の計 測 シス テ ム は さ ま ざま な プ レイヤ ー のバ ス ケ ッ トボ ー ルの シ ュー トフ ォー ム を正確 に計 測 す る こ とが で きる. (キー ワー ド:計 測,三 次 元 ジ ャイ ロセ ンサ,バ ス ケ ッ トボ ー ル,シ ュ ー トフ ォー ム) 1.は じ め に バ ス ケ ッ トボ ー ル は 球 技 の 中 で 最 も 多 く得 点 を 競 う ス ポ ー ツ で あ り,そ の 攻 撃 は パ ス,ド リ ブ ル,シ ュ ー トの 連 動 し た 運 動 で 構 成 さ れ る.特 に,シ ュ ー トは 多 くの 得 点 を 獲 得 す る た め,勝 敗 を 決 定 す る 運 動 と い っ て も 過 言 で は な い. バ ス ケ ッ トボ ー ル に 関 す る 研 究 は,フ ォ ー ム や リ リ ー ス 後 の ボ ー ル 運 動 に つ い て 報 告 さ れ て い る.フ ォ ー ム の 研 究 で は,2ポ イ ン トジ ャ ン プ シ ュ ー ト と3ポ イ ン ト ジ ャ ン プ シ ュ ー トの フ ォ ー ム を 比 較 し た も の が あ る1).一 方, ボ ー ル 運 動 の 研 究 で は,プ レ イ ヤ ー が ボ ー ル を リ リ ー ス し バ ス ケ ッ ト ゴ ー ル に 到 達 す る 間 の ボ ー ル の 力 学 的 な 解 析2)や ゴ ー ル ・リ ム 上 の ボ ール 運 動 を解 析 し た 報 告3,4)も あ る.し か し,ゴ ル フ や テ ニ ス に 比 べ,バ ス ケ ッ トボ ー ル に 関 す る 研 究 は 少 な く,シ ュ ー ト フ ォ ー ム の 計 測 に 関 す る 研 究 は ほ と ん ど行 わ れ て い な い.
一般 に ス ポ ー ツ フ ォー ムの 研 究 で使 用 され る計 測 法 は
,
高速 度 カ メ ラや ビデ オ カ メ ラ を利 用 す るDLT法5,6)で
あ
る.こ れ は カ メ ラで 撮 影 され た ヒ トの 各 部 位 の 運 動 デ ー
タか ら並 進 運 動,回
転 運 動 や 力,ト
ル ク を 求 め る もの で
あ る.し か し,こ の 方 法 に は い くつ か の 問 題 点 が あ る.2
台 以 上 の 同期 の取 れ る高 速 度 カ メ ラ を空 間 に 正 確 に設 置
す る必 要 が あ り,空 間 的 に も シ ス テ ム 構 成 的 に も規 模 が
大 き くな り高 コ ス トとな る.ま
た,バ
ス ケ ッ トボ ー ル の
シュ ー トフ ォー ム に関 して は,特
に 手 首 な ど に取 り付 け
た マ ー カ ーが 運 動 中 に 隠 れ て し ま う こ とが あ り,精 度 良
く測 定 で き な い.
本 論 文 で は,新
た に 三 次 元 ジ ャ イ ロ セ ンサ7,8)を 用 い
る 方 法 を提 案 す る.こ
の 方 法 は基 本 的 に 回転 運 動 を計 測
に よ り求 め,リ
ン クモ デ ル の 下 で運 動 学 を適 用 し並 進 運
動 を求 め る もの で あ る.し た が つ て,ジ
ャ イ ロセ ンサ の
選択 は構 造 的 に上 述 の 従 来 の計 測 法 の 困 難 さ を解 決 す る.
三次 元 ジ ャ イ ロ セ ンサ を ベ ー ス とす る計 測 方 法,具 体 的
な計 測 シ ス テ ム を述 べ る と と もに,ジ
ャ イ ロ セ ンサ を用
い て ワ ンハ ン ドシ ュ ー トに お け る上 肢(上 体,右 肩,右 上
腕,右
前 腕,右
手)の 回転 ・並 進 運 動 を求 め る.さ
らに,
シ ュー トフ ォ ーム を定 量 的 に評 価 す る.
*受 付:2006年5月22日 受 理:2007年1月30日 **日 本 人 間 工 学 会Japan Ergonomics Society ***秋 田 大 学
Akita University
図1 シ ュ ー ト フ ォ ー ム の 剛 体 棒 リ ン ク モ デ ル Fig.1 The rigid link model of shot form.
2.シ ュ ー ト フ ォ ー ム の 運 動 解 析 2-1.座 標 系 の 定 義 上 半 身 の シ ュ ー トフ ォ ー ム を 図1のX,Y,Z絶 対 直 交 座 標 系 お よ び 各 剛 体 棒 上 のx,y,z相 対 座 標 系 の 上 で 考 え る.絶 対 座 標 系 は,被 験 者 の 腰 を 原 点 と し,被 験 者 前 方 の 水 平 方 向(シ ュ ー ト方 向)をZ軸 正 方 向,鉛 直 上 方 をY軸 正 方 向,Z軸 とY軸 の 外 積 をX軸 正 方 向 と す る. 相 対 座 標 系 は,図1の よ う に 各 剛 体 棒 の 上 で 定 義 す る. 2-2.オ イ ラ ー 角 基 準 座 標 系XA-YA-ZAをA,あ る 座 標 系XB-YB-ZB をBと す る.BをAに 一 致 さ せ た 状 態 か ら,ま ずZB軸 ま わ り に 角 度 α,次 にY'B軸 ま わ り に 角 度 β,最 後 にX"B 軸 ま わ りに 角 度γ だ け 回 転 さ せ る.ZB軸 ま わ りの α の 回 転 角 度 に よ つ て 軸[XB,YB,ZB]か ら[X'B,Y'B,Z'B]に 回 転 す る.次 にY'B軸 ま わ り の β の 回 転 角 度 に よ っ て 軸 [X'B,Y'B,Z'B]か ら[X"B,Y"B,Z"B]に 回 転 す る.そ して X"B軸 ま わ りの γ の 回 転 角 度 に よ つ て 軸[X"B,Y"B,Z"B] か ら[X"'B,Y"'B,Z"'B]に 回 転 す る.こ の よ う な3つ の 回 転 角 度 の 組 で あ る オ イ ラ ー 角 が 定 ま れ ば,軸 の 回 転 運 動 は 次 の 回 転 行 列
(1)
よ り,初 期 座 標[xB,yB,zB],回 転 後 の 座 標[x"'B,y"'B,z"'B] が 次 式 で 与 え ら れ る.(2)
2-3.シ
ュ ー トフ ォ ー ム モ デ ル
ヒ トの 上 半 身 の シ ュ ー トモ デ ル は 図1に
示 す5本
の 剛
体 棒 と リ ン クか ら構 成 され,脊 柱 と左 右 肩 は シ ュ ー ト中,
常 に直 交 す る と仮 定 す る.人
間 の運 動 一 般 に お い て 脊柱
や 頚 椎 は そ れ ぞ れ2本
お よ び1本 の 剛 体 棒 で は表 現 で き
な い が,シ
ュ ー ト運 動 に お い て は そ れ ぞ れ 脊柱 と左 右 肩
や 頚 椎 は 一 体 と な っ た 回転 運 動 と し,こ の よ う なモ デ ル
に よ りシ ュ ー ト運 動 を表 す とい う こ の 仮 定 に は,大
き な
無 理 は な い.
絶 対 座 標 系 上 で 各 剛 体 棒 の座 標 を定 め る た め に,他 剛
体 棒 の 運 動 と連 立 して 考 え な け れ ば な らな い.互 い に接
続 す る 剛 体 棒iと 剛 体 棒jを
考 え る.剛 体 棒iはjに
対
し,原 点 か ら見 た と き1個 原 点 に近 い棒 とす る.こ れ ら
の 絶 対 座 標 系 にお け る初 期 座 標 とx,y,z軸
ま わ りの 回
転 角 度 を次 の よ う に表 す.
[初期 座 標]
剛体 棒i:[Xi(0),yi(0),Zi(0)]
剛 体 棒j:[xj(0),yj(0),Zj(0)]
回 転 角 度]
剛 体 棒i:[θxi(t),θyi(t),θzi(t)]剛 体 棒j:[θxj(t),θyj(t),θzj(t)]
こ の 運 動 は式(2)の
オ イ ラ ー変 換 を適 用 で き る が,剛
体 棒jに は 剛体 棒iに お け る 回転 運 動 成 分 お よ び並 進 運 動
成 分 が 重 畳 され て い る.そ の た め に式(2)を 適 用 す るた め
には,は
じめ 剛体 棒jか
ら剛体 棒iの 角 度 成 分 を取 り除 く
必 要 が あ る.剛 体 棒jの 三 次 元 角 度[θxj(t),θyj(t),θzj(t)] か ら 剛 体 棒iの 三 次 元 角 度[θxi(t),θyi(t),θzi(t)]を 差 し 引 き(3)
とす る.同 様 に相 対 座 標 系 に お け る 剛 体 棒 の 初 期 座 標 は,
剛 体 棒jの
初 期 座 標 よ り剛 体 棒2の 初 期 座 標 を差 し引 き
(4)
と な り剛体 棒i,剛
体 棒jの
相 対 座 標 系 にお け る 座 標 は,
図2近 似 モ デ ル
Fig. 2 Approximate link model.
初 期 座 標 と回 転 角 度 を式(2)の
オ イ ラー 変 換 に代 入 して
求 ま る.こ
れ らの 座 標 をpz(t),Pj(t)と
す る.剛 体 棒j
の 絶 対 座 標Pj(t)は
以 下 の よ うに 求 ま る.
(5)
3.シ
ュ ー トフ ォ ー ム の 計 測 法 と そ の シ ス テ ム
3-1.計
測 法
絶 対 座 標 系 にお け る 身 体 部 位 の座 標 を求 め る た め に以
下 の計 測 が 必 要 で あ る.
(1)絶
対 座 標 系 にお け る 身体 部位 の長 さ と各軸 との な す角
(2)身
体 部 位 に 設 定 した 相 対 座 標 系 軸 まわ りの 角 度
(1)の 初 期 座標 は プ レ イヤ ーの 正面,左 側面,頭 上 か らカ
メ ラで撮 影 し,計 測 す る身体 部位 の長 さln(n=1,2,…,5)
と各 軸 との な す 角[θxn,θyn,θzn]を算 出 す る.(2)の
た め
の セ ンサ と して 三 次 元 ジ ャ イ ロ セ ンサ を用 い る.三 次 元
ジ ャ イ ロ セ ンサ は 三 次 元 角 速 度 を計 測 し,1回
積 分 す る
こ とで 角 度 を求 め られ る.さ
らに,設 置 は1ヵ 所 で 済 み,
計 測 が容 易 で あ る.ま
た,体 軸 回転 運 動 を含 む ス ポ ー ツ
フ ォー ム 計 測 に お い て は,回 転 角 速 度 お よ び 回転 角 度 が
重 要 で あ る.
ジ ャ イ ロセ ンサ で 計 測 した 角 速 度 を ス タ ンス 静 止 時 の
そ れ ぞ れ の リ ン ク角 度 を 初 期 値 と して積 分 す る.
(6)
これ を式(3)に 代 入 す る こ と に よ って,(2)身
体 部位 の 角
度 が 求 まる.
3-2.肩
と 右 上 肢 の 並 進 運 動
図2に 示 す よ うに シュ ー トフ ォー ム モ デ ル は腰Wを
原
点 と し,腰Wか
ら上 体UBま
で の長 さloの 剛体 棒WUB,
上 体UBか
ら右 肩Srま
で の長 さl1の 剛 体 棒UBSr,右
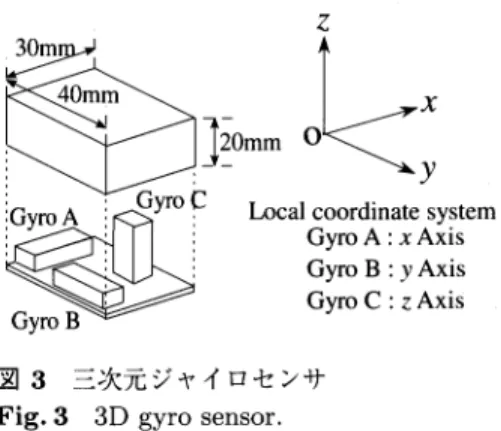
図3三 次 元 ジ ャ イ ロ セ ンサ
Fig.3 3D gyro sensor.
肩Srか ら上 腕Uま で の 長 さ12の 剛 体 棒SrU,右 上 腕U
か ら 右 前 腕Fの 長 さ13の 剛 体 棒UF,右 前 腕Fか ら 右 手Hま で の 長 さl4の 剛 体 棒FHの5本 の 剛 体 棒 か ら な る リ ン ク モ デ ル で あ る.式(4)と3-1計 測 法 の(1)よ り 各 剛 体 棒 の 先 端 の 相 対 初 期 座 標 をpWUB(0),puBSr(0), pSrU(0),pUF(0),pFH(0)と す る.剛 体 棒WUB,SrU, UF,FHに 設 置 し た 三 次 元 ジ ャ イ ロ セ ン サ で 角 速 度 を 計 測 し,式(3),式(6)お よ び2-3の 仮 定 よ り5本 の 剛 体 棒 の 相 対 角 度 を 求 め,式(1)よ り 回 転 行 列 を 定 め る. 以 上 よ り,オ イ ラ ー 変 換 式(2)と 各 初 期 座 標pWUB(0), pugsr(0),psrU(0),puF(0),pFH(0)よ り各 剛 体 棒 の 先 端 の 相 対 座 標 はpWUB(t),PUBSr(t),pSrU(t),pUF(t), pFH(t)と な る. よ つ て シ ュ ー ト フ ォ ー ム モ デ ル に よ る 右 手 の 三 次 元 並 進 運 動 は 絶 対 座 標 系 上 で 次 の よ う に な る.
3-3.計
測 シ ス テ ム
図3に 本 研 究 の 計 測 法 で あ る三 次 元 直 交 配 列 ジ ャ イ ロ
セ ンサ を示 す.使 用 す る ジ ャ イ ロセ ンサ は(株)村
田製 作
所 ジ ャイ ロ ス タ ーENC-03Jで
あ る.三 次 元 直交 配 列 ジ ャ
イ ロ セ ンサ の サ イ ズ は40mm×30mm×20mm,重
量
は29.19と
小 型 か つ軽 量 で,シ
ュ ー ト中 プ レイ ヤ ー の 運
動 に ほ とん ど影 響 を与 え な い.ジ
ャ イ ロス タ ー は 長 時 間
使 用 す る と ドリ フ トが 生 じる が,シ
ュ ー トに要 す る時 間
範 囲 で は,ド
リ フ トに よ る影 響 は ほ とん ど な い.実 際 に
は シ ュ ー ト開 始 ま で の 静 止 状 態 も計 測 して お り,こ の 間
で 生 じる直 流 成 分 を計 測 時 間 全 体 の デ ー タか ら差 し引 き,
ドリ フ トが 生 じた 場 合 に対 処 して い る.
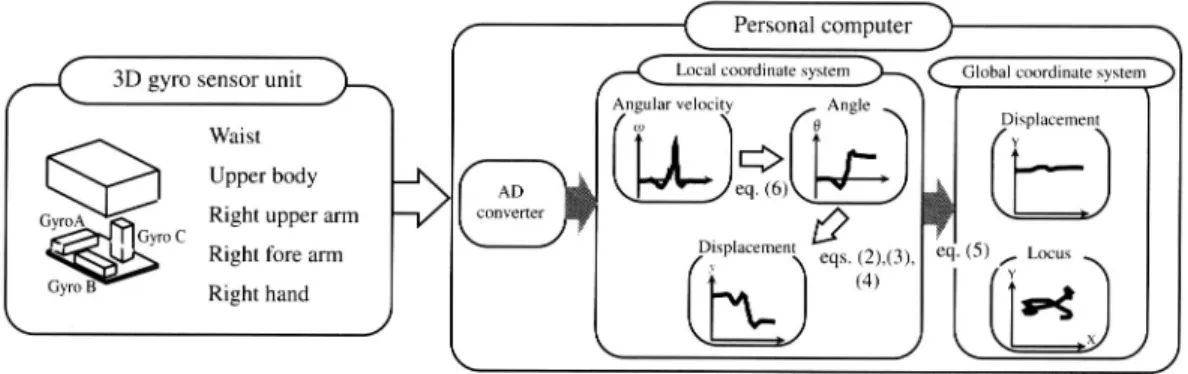
図4に
シ ュ ー トフ ォ ー ム モ デ ルの 信 号 処 理 シ ス テ ム を
示 す.計 測 対 象 部 位 に ジ ャ イ ロ セ ンサ を 設 置 し,シ ュ ー
ト中 の三 次 元 角 速 度 を計 測 す る.AD変
換 してPCに
取
り込 み,式(6)に
よ り角 度 を 求 め,式(3)に
よ り各 節 点
原 著 ・バ ス ケ ッ トボ ー ル ・シ ュ ー トに お け る 上 肢 の 三 次 元 運 動 解 析 83図4角 速 度,角 度 お よ び 変 位 の 信 号 処 理
Fig. 4 The data processing flow to obtain angular velocity, angle and displacement.
表1被 験 者 の 属 性
Tab.1 The attributes of examinees.
表.2被 験 者 の リ ン ク モ デ ル パ ラ メ ー タ
Tab.2 The link model parameters of examinees .
周 りの 角 度 を求 め る.こ
の 角 度 と式(4)の
初 期 座 標 に オ
イ ラー 変 換 式(2)を
適 用 す る.最 後 に式(5)に
よ り身体
部 位 の 絶 対 座 標 系 にお け る 座 標 を 求 め る.
4.計
測 シ ス テ ム の 検 証
4-1.ジ
ャ イ ロ セ ン サ の 追 従 性
運 動 中 の 各 身 体 部 位 の 角 速 度 は ジ ャ イ ロセ ンサ の計 測
保 証 範 囲 を超 え る こ とが 予 想 され る た め,セ
ンサ の計 測
精 度 を検 証 した ・ モ ー タ ーの 軸 に ジ ャイ ロセ ンサ を取 り
付 け,モ ー ター の 回転 角速 度 を10deg/sか
ら1800deg/s
ま で徐 々 に上 昇 させ,ジ
ャ イ ロ セ ンサ の 回転 角 速 度 と比
較 した.そ の 結 果 を図5に
示 す.モ ー ター と ジ ャ イ ロセ
ンサ は偏 回帰 係 数R2=0.96で
高 い線 形 関 係 にあ る こ と
図5モ ー タ ー と ジ ャ イ ロ セ ン サ の 関 係 Fig.5 The relation between motor outputand gyro sensor output.
を実 験 で 検 証 した.
4-2.剛
体 棒2リ
ン ク モ デ ル に よ る 検 証
提 案 した計 測 シ ス テ ム の 精 度 を検 証 す る た め に,設 定
した 角 度 と模 型 をそ の角 度 まで 運 動 させ た と きに セ ンサ
か ら得 られ る 角 度 を比 較 した.ま た,オ
イ ラ ー変 換 で 求
め られ る位 置 に つ い て 検 討 した.
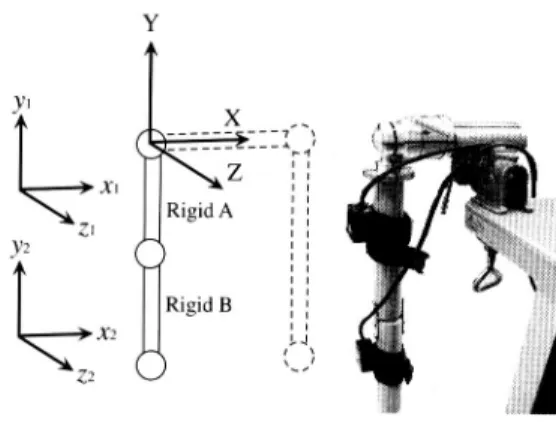
肩 関 節 模 型 は 図6で
示 す よ う に,3自
由度 を持 つ ボ ー
ル ジ ョイ ン トと1自 由度 で接 続 した長 さ0.25mの
剛体 棒
(RigidA)と
長 さ0.20mの
剛 体 棒(RigidB)で
構 成 され,
そ れ ぞ れ の 剛体 棒 に 三次 元 ジ ャイ ロ セ ンサ を取 り付 け た.
絶 対 座 標 系 お よ び相 対 座 標 系 は 同 図 に 定 義 し,回 転 の 正
方 向 は 各軸 を中 心 と し右 まわ り と した.
実 験 で 行 った 模 型 の 運 動 は屈 曲す な わ ちX軸
ま わ りの
回転 運 動 で,設 定 角 度 を90° と し各20回
の 計 測 を行 つ
た.Rigid1の
計 測 結 果 の 平 均 値 は90.1°,最
大 誤 差 は
3.5%で あ り,Rigid2の
計 測 結 果 の 平 均 値 は90.2°,最
大 誤 差 は3.7%で
あ っ た.
図6 検 証 用 剛 体 棒2リ ン ク モ デ ル
Fig. 6 The two rigid link model for verification.
図7
2本 の 剛体 棒 の角度
Fig. 7 The two rigid link model for verification.
一 方,模 型 を 前 述 の 実 験 の よ う に90° 動 か した と きの ジ ャ イ ロ セ ン サ で 計 測 し た 角 度 と 各 剛 体 棒 の 初 期 座 標 を 用 い,オ イ ラ ー 変 換 で 求 め ら れ る 絶 対 座 標 を 比 較 し た. 各 剛 体 棒 の 初 期 座 標 はRigid A:(0,0.25,0),Rigid B: (0,0.45,0)と した.結 果 の 一 例 と し て,各 剛 体 棒 の 絶 対 座 標 系 に お け る 変 位 を 図7に 示 す.X軸 ま わ り に90° で 回 転 運 動 し たRigid Aの 座 標 の 理 論 値 は(0,0,0.25)で あ る の に 対 し実 験 の 平 均 値 は(-0.008,0.003,0.251),X軸 ま わ り に 90° で 回 転 運 動 し たRigid Bの 座 標 の 理 論 値 は(0,0,0.45) で あ る の に 対 し実 験 の 平 均 値 は(-0.007,0 .002,0.445)と な り,理 論 値 と ほ ぼ 一 致 し た. 本 シ ス テ ム で 計 測 し た 角 度 お よ び オ イ ラ ー 変 換 に よ る 求 ま る 変 位 は 十 分 な 精 度 を 持 つ こ と を 実 験 で 検 証 し,有 用 性 を 示 し た. 5.シ ュ ー ト フ ォ ー ム の 計 測 実 験 開 発 した シ ス テ ム を 用 い シ ュ ー ト フ ォ ー ム の 計 測 実 験 と有 効 性 の 評 価 を 行 う. 図8実 験 シ ス テ ム
Fig. 8 Experimental system.
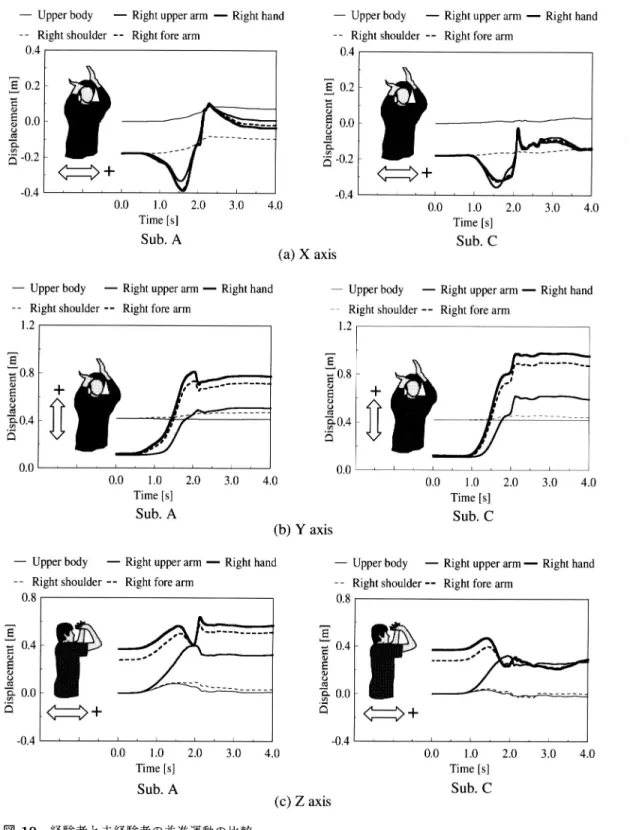
5-1.実 験 方 法 と 被 験 者 図8に 示 す シ ュ ー トフ ォ ー ム の 実 験 シ ス テ ム は 次 の2 要 素 か ら 構 成 さ れ る. (a)三 次 元 直 交 配 列 ジ ャ イ ロ セ ン サ:腰,肩(肩 甲 骨 の 間),右 上 腕,右 前 腕,右 手 に 図3の ジ ャ イ ロ セ ン サ を 取 り付 け,そ れ ぞ れ の 相 対 座 標 系 に お け る 回 転 角 速 度 を 計 測 す る. (b)リ リ ー ス ポ イ ン ト検 出 装 置:ボ ー ル リ リ ー ス 時 刻 を 検 出 す る た め,導 線 を 被 験 者 の 人 差 し指 と 中 指 のDIP関 節 の 近 位 に 設 置 し,ボ ー ル 表 面 に ア ル ミ箔 を 貼 り付 け て, 被 験 者 が ボ ー ル に 触 れ る こ と に よ りon,指 先 か ら ボ ー ル が 離 れ る こ と に よ りoffと な る 装 置 で あ る.こ れ に よ り offに な っ た 時 点 を ボ ー ル リ リ ー ス 時 刻 と し て 検 出 す る. な お,ボ ー ル リ リ ー ス 時 刻 は2.0sと す る. 被 験 者 は 経 験 者Sub.AとBの2名,末 経 験 者Sub.C とDの2名 の 計4名 で,こ れ ら の 属 性 を表1に 示 す.ま た,各 被 験 者 の 絶 対 座 標 系 に お け る 初 期 座 標 を 定 め る た め に,図2で 示 し た 近 似 モ デ ル の パ ラ メ ー タ に 該 当 す る 身 体 部 位 の 長 さ と 各 軸 と の な す 角 度 を 表2に 示 す.な お, シ ュ ー ト フ ォ ー ム の 初 期 姿 勢 は 各 被 験 者 の 全 試 行 に お い て,表2に 示 す 角 度 の 姿 勢 と し た.実 験 は,軽 く ウ ォ ー ミ ン グ ア ッ プ を 行 っ た 後 で,フ リ ー ス ロ ー ラ イ ン か ら 距 離5.6m,高 さ3.05mの ゴ ー ル に 直 接 ボ ー ル が 入 る よ う に10回 試 技 した. 5-2.実 験 結 果 5-2-1.回 転 運 動 回 転 運 動 の 計 測 結 果 の 一 例 と して,表1の 属 性 を 持 つ Sub.AとSub.Cの 右 前 腕 と右 手 に 設 置 し計 測 した 角 速 度 と 角 度 を 図9に 示 す. (a)に 示 す リ リ ー ス 瞬 間 の 右 前 腕 に 取 り付 け た セ ン サ の 原 著 ・バ ス ケ ッ トボ ー ル ・シ ュ ー トに お け る 上 肢 の 三 次 元 運 動 解 析 85
図9経
験 者 と未経 験者 の 回転運 動 の比較
Fig. 9 Comparison by rotational motion of a experi-encer and a beginner.
y軸 周 り角 速 度(破 線)を 比 較 す る.Sub.Aは-90.5deg/s と リ リ ー ス 付 近 で 回 内 運 動 し て い る の に 対 し,Sub.Cは 67.7deg/sと 回 外 運 動 し て い る.シ ュ ー トの 指 導 に お い て,「シ ュ ー トす る 際,内 側 に 前 腕 を ひ ね り な が ら,す な わ ち 回 内 運 動 し な が ら伸 ば す 」 こ とが 重 要 な 運 動 要 素 の 一 つ と し て 取 り上 げ ら れ る.10回 の 平 均 値 を 比 較 す る と経 験 者 は リ リ ー ス 付 近 で そ れ ぞ れ-106.2deg/s,-102.8deg/s と 回 内 運 動 に 対 し,未 経 験 者 は そ れ ぞ れ51.2deg/s,42.3 deg/sと 回 外 運 動 の 傾 向 に あ る. 次 に,(b)に 示 す リ リ ー ス 後 の 右 手 に 取 り付 け た セ ン サ のx軸 周 り角 度(細 線)を 比 較 す る,Sub.Aの 右 手 は リ リ ー ス 後,約20° ま で 掌 屈 し,そ の 後 約-20° で 背 屈 の 状 態 で シ ュ ー ト動 作 を 終 え て い る.一 方,Sub.Cの 右 手 は リ リ ー ス 後,約15° ま で 掌 屈 し,そ の ま ま の 状 態 で シ ュ ー ト動 作 を 終 え て い る.こ れ らの 傾 向 はSub.B,Sub.Dに お い て も現 れ て お り,手 の 掌 屈 ・背 屈(ス ナ ッ プ)の 有 無 を 示 し て い る. 5-2-2.並 進 運 動 図10にSub.AとSub.Cの 上 体,右 肩,右 上 腕,右 前 腕 お よ び 右 手 のX,Y,Z軸 方 向 の 変 位 を 示 す. (a)の 細 線 と 細 破 線 よ り リ リ ー ス 前 後 で 経 験 者 の 上 体 と右 肩 のX軸 方 向(左 右 方 向)の 変 位 に 比 べ,未 経 験 者 の 変 位 は 大 き い.ま た(b)の 極 太 線 よ り右 手 の リ リ ー ス 直 前 のY軸 方 向(上 下 方 向)の 変 位 を 比 較 す る と,経 験 者 は ボ ー ル を 額 付 近 に 持 っ て き て か ら 約0.2s静 止 し リ リ ー ス す る の に 対 し,未 経 験 者 に は こ の 静 止 状 態 が 見 ら れ な か っ た.こ れ ら の 傾 向 はSub.B,Sub.Dの シ ュ ー ト動 作 に お い て,同 様 な 傾 向 が 現 れ て い た.経 験 者 の シ ュ ー ト 成 功 率 が 高 く,安 定 し て い る 要 因 の 一 つ と し て,リ リ ー ス 前 後 で の 身 体 運 動 の 並 進 運 動 が 少 な く,ば ら つ き も小 さ い フ ォ ー ム に あ る と 考 え ら れ る. 6.む す び 本 研 究 は 新 た に ジ ャ イ ロ セ ン サ を 用 い た バ ス ケ ッ トボ ー ル の 三 次 元 運 動 計 測 法 と そ の シ ス テ ム に つ い て 検 討 し た. 具 体 的 に 取 り組 ん だ 問 題 は 以 下 の と お り で あ る. (P1)シ ュ ー トフ ォ ー ム の 運 動 解 析 (P2)計 測 法 の 検 討 (P3)計 測 シ ス テ ム の 構 築 と 精 度 の 検 証 (P4)シ ュ ー トフ ォ ー ム の 計 測 実 験 と 評 価 次 の 結 果 を 得 た. (A1)プ レ イ ヤ ー の 上 肢 を5本 の 剛 体 棒 と リ ン ク か ら な る モ デ ル を 提 案 し た. (A2)こ の モ デ ル を も と,フ ォ ー ム の 三 次 元 回 転 運 動 を 計 測 す る 方 法 と 回 転 運 動 か ら得 ら れ た 結 果 を オ イ ラ ー 変 換 す る こ と で 三 次 元 並 進 運 動 を 求 め る 方 法 を 提 案 し た. (A3)三 次 元 ジ ャ イ ロ セ ンサ を ベ ー ス と す る 計 測 シ ス テ ム を 構 築 し,シ ス テ ム の 精 度 を2本 の 剛 体 棒 と リ ン ク か ら な る モ デ ル で 検 証 した. (A4)(A3)の シ ス テ ム を 用 い て,シ ュ ー トフ ォ ー ム の 計 測 実 験 を行 っ た.そ の 結 果 よ り,計 測 が 困 難 で あ っ た 手 首 の 運 動 を は じめ,経 験 者 と 未 経 験 者 の 運 動 の 違 い を 示 し た, 提 案 し た 計 測 シ ス テ ム で 計 測 さ れ る シ ュ ー ト フ ォ ー ム と シ ュ ー ト成 功 率 の 関 係 を 実 験 的 に 明 ら か に す る こ と は, 興 味 深 い テ ー マ で あ り,今 後 取 り 組 ん で い く. 参 考 文 献 1)三 浦 健,三 浦 修 史,松 岡 俊 恵:バ ス ケ ッ トボ ー ル に お け る ジ ャ ン プ シ ュ ー トの 動 作 分 析 ―2ポ イ ン ト.シ ュ ー ト と3ポ イ ン ト.シ ュ ー トの 比 較―,鹿 屋 体 育 大 学 学 術 研 究 紀 要25,1-8,2001
2)
Silverberg
L., Chau Tran and Kit Adcock :
Numer-ical analysis of the basketball,
ASME Journal
of
Dy-namic systems,
Measurement,
and Control
125,
531-540,2003
3)
H. Okubo
and
M. Hubbard
:
Dynamics
of
basketball-rim
interactions,
The engineering
of Sport
4, 660-666, 2002
4)
H. Okubo and M. Hubbard
: Effects of basketball
free throw release conditions
using a dynamic
model,
The engineering
of Sport 5, 372-378, 2004
5)持 丸 正 明:身 体 運 動 計 測 技 術 の動 向:計 測 と制 御,Vol.36, No.9,609-614,1997
Sub.A Sub.C
(a)X axis
Sub.A Sub.C(b)Y axis
Sub.A Sub.C(c)Z axis
図10
経験 者 と未経 験 者の並 進運動 の 比較
Fig. 10 Comparison by displacement of a experiencer and a beginner.
Japanese Journal of Sports Science, Vol.2, No.3, 163-170, 1983
7)穂 苅 真 樹,栗 原 陽 介,瀬 川 友 輔,渡 辺 嘉 二 郎,鳴 尾 丈
司:ス ポ ー ッ フ ォ ー ム の 運 動 解 析 と計 測-ゴ ル フ ドラ イ
バ ー ス イ ン グ フ ォ ー ム の 計 測 一,計 測 自動 制御 学 会 論 文 集 , Vol.38,No.11,922-930,2002