JAIST Repository: 股関節二分機構を用いて上体を付加した劣駆動2脚ロボットの動歩行解析
13
0
0
全文
図

+6
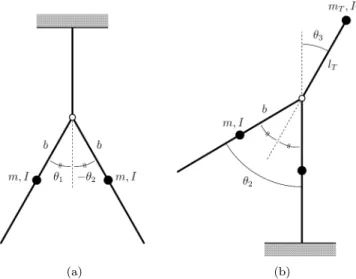
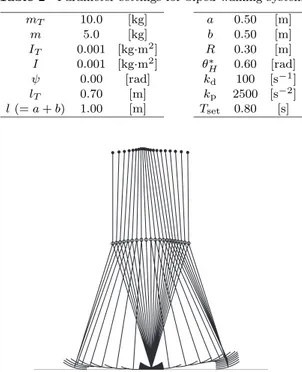
![Table 1 Physical parameters of biped robot m T 5.0 [kg] m 5.0 [kg] I T 0.001 [kg · m 2 ] I 0.001 [kg · m 2 ] ψ 0.0 [rad] l T 0.3 [m]l(=a+b)1.0[m]a0.5[m]b0.5[m]R0.3[m]](https://thumb-ap.123doks.com/thumbv2/123deta/6199158.1088113/8.892.81.432.82.636/table-physical-parameters-of-biped-robot-t-rad.webp)
関連したドキュメント
本実験には,すべて10週齢のWistar系雄性ラ ット(三共ラボラトリ)を用いた.絶食ラットは
そこでこの薬物によるラット骨格筋の速筋(長指伸筋:EDL)と遅筋(ヒラメ筋:SOL)における特異
自分は超能力を持っていて他人の行動を左右で きると信じている。そして、例えば、たまたま
二九四 経済体制構想と密接な関係を持つものとして構想されていたといえる( Leon Martel, Lend-Lease, Loans, and the Coming of the Cold War : A Study of the
ダウンロードしたファイルを 解凍して自動作成ツール (StartPro2018.exe) を起動します。.
Amount of Remuneration, etc. The Company does not pay to Directors who concurrently serve as Executive Officer the remuneration paid to Directors. Therefore, “Number of Persons”
歩行 体力維持と気分転換 屋外歩行・屋内歩行 軽作業 蝶番組立作業等を行い、工賃収入を得る 音楽 カラオケや合唱をすることでのストレスの解消
これら諸々の構造的制約というフィルターを通して析出された行為を分析対象とする点で︑構
