Lift and Drag Characteristics of an Airfoil and Dynamic Control for the Wind Speed Decrease in the Low Reynolds Number Range
Yohei H
AMASAKI*, Masashi Y
AMAGUCHI*, Tetsuya Y
AMAGUCHI*, Kyoji I
NAOKA* and Mamoru S
ENDA* (Received May 7, 2013)
Lift and drag forces of a symmetric airfoil with miniature electromagnetic actuators have been measured in the low Reynolds number rage from 3104 to 1105. The effect of the actuation has also been demonstrated under the condition that a wind speed has suddenly been decreased and that should have leaded to the stall. It was found that both of the coefficient of the maximum lift and the stall angle of attack increased as the Reynolds number was increased. The actuation makes the coefficient of the maximum lift and stall angle of attack larger than those in the no-actuation case for each Reynolds number treated in the present study, although its effectiveness shows the largest at 3104 and becomes smaller as the Reynolds number is increased. Even in the case of the wind speed decrease, it was demonstrated that the actuation was effective to avoid the stall and to keep the high lift at each wind speed.
Key words:Airfoil, Lift force, Stall, Electromagnetic actuator, Flow control キーワード:翼,揚力,失速,電磁型アクチュエータ,流れの制御
低レイノルズ数領域における対称翼の揚力・抗力特性と 風速低下時に発生する失速の動的制御
浜崎陽平,山口真志,山口哲也,稲岡恭二,千田 衞
1.はじめに
翼周りの流れの剥離制御は,飛翔体の安全航行や 流体機械の性能維持のために重要である.高レイノ ルズ数領域における翼の空力特性については,これ まで数多くの研究の蓄積がある.しかしながら,例 えば災害救助や環境調査に使用される小型飛翔体の 周りの流れは,流れのレイノルズ数が
10
4から10
6 のいわゆる低レイノルズ数領域であり,その空力特 性は未だ十分には理解できていない1)~4).今後この種の飛翔体は重要性がさらに増すものと考えられ,
かかる領域での翼特性の理解と失速の制御性を調査 することは工学上重要である.
著者らはこれまでに,対称翼型の先端に電磁型ミ ニアクチュエータ 5)を付設する場合に注目し,流れ のレイノルズ数が
5
×10
4の流れ場において揚力・抗 力を測定し,アクチュエータの稼働が翼周りの剥離 特性に変化を与え,揚力の増加に有効であることを 明らかにした6).また,翼の迎角を増加させていき,*Department of Mechanical Engineering, Doshisha University, Kyotanabe, Kyoto 610-0321 Telephone: +81-774-65-6463, Fax: +81-774-65-6802, E-mail: [email protected]
18.006 15Electromagnetic actuators
Electromagnetic actuators 620
150
18.006 15Electromagnetic actuators
Electromagnetic actuators 620
150
+ -
-
φ Copper Film
+
+ -
-
10 3 12
Permanent Magnet Polyimide Film
20° Φ10×10
+ -
-
φ Copper Film
+
+ -
-
10 3 12
Permanent Magnet Polyimide Film
20° Φ10×10
何もしなければ失速が発生する場合について検討し,
揚力信号を入力として失速を検知すると同時に,ア クチュエータを稼働するフィードバック制御が失速 の遅延と回避に有効に作用することを実証した 7). 上述の小型飛翔体が様々な流れ条件下で使用される ことを念頭におけば,翼特性とアクチュエータの有 効性をより広いレイノルズ数において調べることが 重要である.また,流れの条件が,例えば悪天候下 では突発的に変化する場合も想定されるため,飛行 中の風速変化に対する制御性の検討も必要である.
本論文では,流れのレイノルズ数が
3
×10
4~1
×10
5までの領域において揚力・抗力測定実験を行い,アクチュエータの揚力増大効果について整理する.
そして,接近流の風速を低下させ,何もしなければ 失速に至る条件下において,アクチュエータの制御 性について実証実験を行い,その結果を検討する.
2.実験装置と実験方法
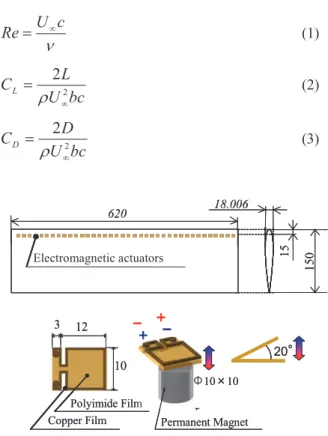
2.1 翼型,実験装置ならびに揚力抗力測定方法 本実験では,以前の検討 6,7)と同じく
NACA0012
対称翼型と電磁型ミニアクチュエータを使用した.使用した翼型の寸法は,
Fig. 1
の上段に示すとおり,翼弦長c =150 mm, スパン長b =620 mm,翼厚
18mm
である.翼型の前縁から15mm
の位置に電磁型ミニ アクチュエータ(以下,アクチュエータと呼称する)を
30
個スパン方向に取り付けてある.アクチュエー タ可動部の大きさは,Fig. 1
の下段のように流れ方 向長さ12mm
,幅10mm
であり,ポリイミドフィル ムに銅回路をエッチング加工して製作してある.PC
に接続されたファンクションジェネレータからこの 回路にパルス信号を与え,回路の通電方向を変化さ せ,翼型に埋め込まれた直径10mm
の永久磁石との 磁場の相互作用を変更し,流れに対して垂直方向に 連続的に振動を与える.この翼型を多分力検出器と 接続支持し,低速回流型風洞の1000mm
×1000mm
の大きさの測定部に設置した.Fig. 2
のように主流 方向とのなす角度を翼の迎角αとし,翼にはたらく 流れ方向の力を抗力D,それと垂直方向の力を揚力 L とする.実験時には,多分力検出器からの出力電圧はひずみ測定モジュールを介してデジタル信号に 変換しながら,揚力と抗力の時系列信号として
PC
に収録することができる.以前の検討 7)では,時々 刻々の揚力を入力信号として,アクチュエータの稼 働と翼の迎角を変更するフィードバック制御を行っ た.本論文では,翼の近くに設置したピトー管によ り風速を時々刻々と採取し,その時系列信号から風 速低下を検知すればアクチュエータを自動的に稼働 する単純な制御プログラムを実行する検証実験を行 った.実験における代表長さはいずれも翼弦長cとし,
流れのレイノルズ数Re,揚力係数CL,抗力係数CD
を以下の式で定義する.
c
Re U
(1)
bc U C
L2 L
2
(2)
bc U C
D2 D
2
(3)
L
D α
c Flow
L
D α
c Flow
Fig. 1. Airfoil and electromagnetic actuators.
Fig. 2. Angle of attack, lift and drag forces.
ただし,U∞は主流速度,
は空気の動粘性係数,
は密度を示す.2.2 各 Re 数に対する翼特性と失速遅延効果マップ アクチュエータの揚力増大効果の有無を整理する ことを目的として,レイノルズ数がRe=3×
10
4~1
×10
5の領域において,各Re数について揚力・抗力の 迎角に対する変化を調べた.実験では,アクチュエ ータを稼働させる場合と稼働させない場合について,迎角αを
0
~20
°まで変更し,各角度における揚 力・抗力の値を調べるとともに,アクチュエータの 失速遅延効果の有無について,Re数と迎角αをパラ メータとして整理しマップを作成した.アクチュエ ータの振動数は著者らの以前の知見 6)をもとに,各 レイノルズ数に対して最も効果が現れる値(13
~27Hz
)を与えた.2.3 風速低下時のフィードバック制御実験 失速遅延効果マップをもとに,風速低下時におけ るアクチュエータの有効性を調べた.その一例とし て,迎角をα
=11
°に固定した上で,実験開始後揚 力・抗力の値が安定した約12
秒後に風速をRe=6×10
4から4
×10
4まで10
秒間かけて減じる条件を設定 した.すなわち,何もしなければ失速に至るような 風速低下条件に注目し,風速信号を採取しながら,その低下を検知すればアクチュエータを稼働させる ことにより,失速を遅延・回避する動的制御の実証 実験を行い,アクチュエータ稼働の効果を確認した.
3.実験結果および考察 3.1 各 Re 数における翼特性
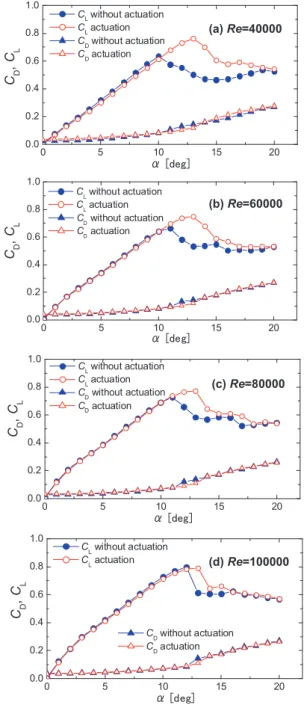
Fig. 3(a)
~(d)
に本実験で得られた揚力係数C
Lと 抗力係数C
Dの結果の一例を示す.中実のプロット はアクチュエータ非稼働時の場合であり,中空のプ ロットは稼働時の場合である.図を概観すると,ま ず非稼働時においては,揚力係数CLはいずれのレイ ノルズ Re 数においても迎角の増加とともに単調に 増加し,ある迎角において最大値に達したのち,減 少に転じることが分かる.このとき流れは翼型の先 端からはく離し,翼は失速状態になる.この失速に 転じる際の最大揚力L
maxと抗力D
のRe数に対するFig. 3. Lift and drag coefficients for each angle of attack.
Fig. 4. Lift and drag forces at a stall angle of attack.
(a) Re=40000
(b) Re=60000
(c) Re=80000
(d) Re=100000
0 5 10 15 20
0.0 0.2 0.4 0.6 0.8 1.0
CD without actuation CD actuation
C D, C L
α [deg]
CL without actuation CL actuation
0 5 10 15 20
0.0 0.2 0.4 0.6 0.8 1.0
CD without actuation CD actuation
CD, CL
α [deg]
CL without actuation CL actuation
0 5 10 15 20
0.0 0.2 0.4 0.6 0.8 1.0
CD without actuation CD actuation CL without actuation CL actuation
CD, CL
α [deg]
0 5 10 15 20
0.0 0.2 0.4 0.6 0.8 1.0
CD without actuation CD actuation
C D, C L
α [deg]
CL without actuation CL actuation
0 1 2 3 4 5 6 7 8 9 10
0 1 2 3 4 5
x104
L max [N], D [N]
Re
Lmax without actuation Lmax actuation D without actuation D actuation
変化を
Fig. 4
に示した.最大揚力L
max(●印)と抗 力D
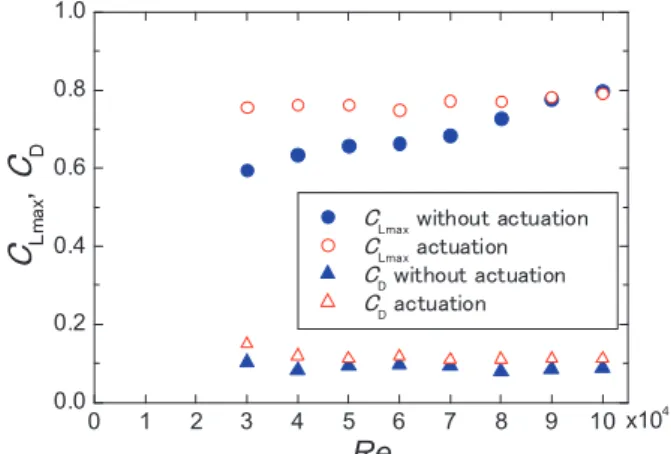
(▲印)の値は,Re数の増加とともにその2乗 に比例して増加することが分かる.これらを最大揚 力係数C
Lmax,抗力係数CDとして整理したものをFig.
5
に示す.Fig. 5
より,最大揚力係数は,例えばRe=3×
10
4では約0.6
,Re=1×10
5では約0.8
となり,Re 数の増加とともに単調に増加することが分かる.ま た,失速角に注意しながらFig. 3
の非稼働時のプロ ットを改めて見ると,失速角は Re=4×10
4 ではα=10
°,Re=1×10
5ではα=12
°であり,Re数の増加 とともに増加することが分かる.いっぽう,アクチュエータ稼働時については,ま
ず
Fig. 3
を見ると,揚力係数の値は失速角より低迎角側では非稼働時のそれとほぼ同様な値を示すもの の,揚力係数のピークはより高い迎角にあること,
すなわち失速現象が非稼働時の失速角と比較して高 迎角において生じ,また,揚力係数の値も大きいこ とが分かる.
Fig. 5
より,アクチュエータ稼働時の 最大揚力係数はRe=3×10
4では約0.75
であり,非稼 働時の値より大きく,アクチュエータの稼働が揚力 係数の増加に効果的であることが分かる.Fig. 5
よ り,この効果は本研究の範囲では低 Re 数側で大き く,Re 数の増加とともに徐々に小さくなり,Re=1×
10
5では概ね失われる様子が見て取れる.Fig. 3
よ り,アクチュエータ稼働時の失速はいずれの Re 数 においても同じ迎角α=13
°で発生し,アクチュエ ータ稼働による失速遅延効果は,いずれの Re 数に おいてもα=13
°まで得られ,Re 数が小さいほど大 きく,Re=1×10
5では失われることが確認できる.他方,
Fig. 5
の失速時における抗力係数CDに目を向けると,アクチュエータ稼働時の値は,いずれの Re数においても非稼働時のそれより高い.したがっ て,アクチュエータの稼働による揚力増加の効果が あるいっぽうで,抗力増加も生じることが分かる.
Fig. 6(a)
~(d)
には,Fig. 3
と同じ各Re数における揚 抗比の迎角に対する変化を例示した.大きなアクチ ュエータ効果が得られる低い Re 数の場合において も,稼働時の揚抗比の値は失速角より小さい迎角に おいて低下しており,失速が生じない低迎角側では アクチュエータを稼働しない方が良いことが分かる.Fig. 5. Lift and drag coefficients at a stall angle of attack.
Fig. 6. Lift / drag ratio for each angle of attack.
(a) Re=40000
(b) Re=60000
(c) Re=80000
(d) Re=100000
0 5 10 15 20
0 2 4 6 8 10 12
L/D
α [deg]
without actuation actuation
0 5 10 15 20
0 2 4 6 8 10 12
L/D
α [deg]
without actuation actuation
0 1 2 3 4 5 6 7 8 9 10
0.0 0.2 0.4 0.6 0.8 1.0
x104
C
Lmax, C
DRe
CLmax without actuation CLmax actuation CD without actuation CD actuation
0 5 10 15 20
0 2 4 6 8 10 12
L/D
α [deg]
without actuation actuation
0 5 10 15 20
0 2 4 6 8 10 12
L/D
α [deg]
without actuation actuation
いっぽう,迎角が高い領域においては,アクチュエ ータの稼働によって揚抗比の値そのものは低下する ものの,ある程度高い揚抗比をα
=13
°まで維持可 能なことも確認できる.Fig. 6(d)
のRe=1×10
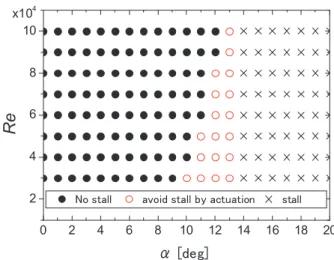
5のプロ ットを見れば,揚抗比の観点からも,アクチュエー タ稼働の効果が Re 数の増加とともに小さくなるこ とが確認できる.3.2 アクチュエータ稼働の失速遅延効果マップ アクチュエータ稼働時に得られる失速遅延効果を 本研究で適用したレイノルズ数 Re と迎角αの二つ のパラメータ条件について整理して
Fig. 7
にマップ として示した.失速が発生しない条件を●印で,ア クチュエータ非稼働時には失速するが,稼働すると 失速が回避できる条件を○印で,アクチュエータを 稼働させても失速が生じる条件を×印で示した.し たがって,マップ上で○印の領域がアクチュエータ が有効な領域である.前節で述べたように,アクチ ュエータの失速遅延効果は Re 数の増加とともに小 さくなること,失速遅延効果が得られる最大迎角が 存在することが改めて確認できる.このマップ図より,●印の領域から風速(本論文 ではRe数)が低下して○印の領域に入れば,迎角に よっては何もしなければ失速が発生する条件におい て,アクチュエータを稼働することによって失速を 回避することが可能な領域があることが分かる.本 論文では,かかる条件下において,アクチュエータ 稼働を開始する動的制御方法を利用して,失速現象 の発生が実際に回避可能か否かをα
=11
°,風速を Re=6×10
4からRe=4×10
4に減じる条件で行い,次節 にその結果を考察した.3.3 風速低下時のフィードバック制御実験
Fig. 8
に迎角をα=11
°に固定し,風速を途中で減じた場合の揚力
L
と抗力D
の時間推移を示す.アク チュエータを稼働させない場合の結果を一点鎖線で,風速低下を検知すると同時にアクチュエータを稼働 させる場合を実線で示している.図の中段にはアク チュエータ稼働の
ON/OFF
を,また上段にはピトー 管で測定した風速の時系列信号を示している.図より,アクチュエータの稼働と非稼働の二つの
条件において,揚力信号,抗力信号の両者とも,試 験開始後約
12
秒間は概ね同程度の値を示している ことが確認できる.その後,約12
秒から約22
秒ま で10
秒間かけて風洞の流量弁を絞って風速低下を 与えているが,アクチュエータ非稼働時の揚力の値 は,風速の低下とともに著しく減少し,16
秒付近で 小刻みに上下する振動が始まり,さらに低下を続け,風速低下が完了した
22
秒後でも値は増減を継続的 に繰り返しながら推移する様子が見て取れる.この 揚力の小刻みの振動は,揚力値が下がり続けた後に,その値が
0.6[N]
程度になった時刻から発生している.Fig. 4
のプロットからも分かるように,この0.6[N]
はRe=4×
10
4における最大揚力値と同程度であり,その後の振動時の揚力の値は,明らかに
0.6[N]
を下Fig. 7. Stall delay effect by the present actuator.
Fig. 8. Time variation of lift and drag forces for the wind speed decrease.
0 5 10 15 20 25 30
0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 4 6
L, actuation
D, without actuation L, without actuation D, actuation
D [N], L [N]
T [s]
actuation wind speed x104
Re
ONOFF
0 2 4 6 8 10 12 14 16 18 20 2
4 6 8 10 x104
α [deg]
Re
No stall avoid stall by actuation stall
回っており,翼が失速状態になっていることを表し ている.いっぽう,風速低下を検知してアクチュエ ータの稼働を開始するプログラムを与えた場合には,
12
秒付近でアクチュエータが実際に稼働を開始す ると同時に,揚力の値は風速低下とともに最初は稼 働していない場合と同様に著しく減少するものの,15
秒付近から緩やかに揚力値0.6[N]
に近づいている ことが見て取れる.アクチュエータの非稼働時に見 られたような時間的な振動は認められない.したが って,本研究の風速低下条件においては,風速低下 の検知とその後のアクチュエータの稼働によって翼 の失速現象が回避されること,そして風速低下後に 得られる揚力値が予め測定した風速条件下での値と 概ね一致することが分かった.なお,本論文の検討 では,風速の時間変化がさらに大きい場合や風速変 化が複雑な場合に対するアクチュエータの制御性,また,風速低下中の間の翼特性の詳細は未解明であ り今後の課題である.
4.結言
電磁型ミニアクチュエータを付設した対称翼につ いて,翼弦長を代表長さとする流れのレイノルズ数 が
3
×10
4から1
×10
5までの領域(低レイノルズ数領 域)において,揚力・抗力測定実験を行い,アクチ ュエータ非稼働時と稼働時の揚力・抗力特性につい て整理した.また,アクチュエータの風速変化に対 する適用性を調べる実験として,迎角を11
°一定に 保つ条件下で風速を低下させ,発生する失速現象を アクチュエータの稼働によって回避可能か否かにつ いて調べた.得られた結論は下記の通りである.(1)
アクチュエータ非稼働時の最大揚力係数および 失速角は,本実験のレイノルズ数の範囲におい ては,レイノルズ数の増加とともに増大する.(2)
アクチュエータ稼働時においては,揚力係数の 値は失速角より小さい迎角では非稼働時の値と 概ね一致する.しかし,抗力係数の値は非稼働 時よりも大きく,揚抗比は小さくなる.(3)
アクチュエータ稼働時の最大揚力係数および失 速角はいずれも非稼働時より高く,アクチュエータの稼働は揚力増加と失速遅延に有効である.
本研究のアクチュエータの効果はレイノルズ数 が
3
×10
4で最も高く,1
×10
5で概ね消失する.(4)
レイノルズ数と迎角の二つのパラメータを使っ て,失速遅延効果マップを作成することにより,アクチュエータの失速遅延効果を整理すること ができた.
(5)
風速低下時に生じる失速を,その低下を検知し てアクチュエータを稼働することにより回避で きることが示された.本実験で得られた揚力係 数の値は,風速固定時の値と概ね同じ値になる ことが分かった.本研究は文部科学省私立大学戦略的研究基盤形成 支援事業「ゼロエミッション技術を基盤とした環境 調和型エネルギーグリッドの最適化研究」の支援を 受けた.ここに記して謝意を表する.
参考文献
1) 阿部裕幸,筒井康賢,吉識晴夫,“低レイノルズ数領域 において翼形特性に及ぼす主流乱れの影響(乱れ発生装 置による実験)”,日本機械学会論文集(B編),62-602, 3592-3598 (1996).
2) 西沢 啓,高木正平,吉田博夫,“翼周りの剥離流に関 するスマート制御”,ながれ, 25,111-118 (2006), 3) 大竹智久,中江雄亮,本橋龍郎,“低 Re 数領域での
NACA0012翼の非線形空力特性”,日本航空宇宙学会論
文集,55-644, 439-445(2007).
4) 中江雄亮,本橋龍郎,小紫誠子,桑原邦郎,“低レイノ ルズ数領域におけるNACA0012 翼型周りの3次元流れ のシミュレーション”,数値解析研究所講究録,1539, 157-164(2007).
5) 鈴木宏明,笠木伸英,鈴木雄二,“フラップ型電磁アク チュエータ群による軸対称噴流の能動制御”,日本機械 学会論文集(B 編),65-639, 3644- 3651(1999).
6) 稲岡恭二,大嵩豪朗,塚本兼大,千田衞,“電磁型ミニ アクチュエータを用いた対称翼の失速制御”,日本機械 学会論文集(B 編),75-752, 683-690 (2009).
7) 川村晃平,浜崎陽平,稲岡恭二,千田 衞,“翼周りの 流れの失速検知とフィードバック制御(迎角増加時にお ける検討)”,日本機械学会論文集(B 編),78-796, 2087-2095(2012).