活状態と操作性評価に関する一考察
著者 横尾 公哉, 積際 徹, 横川 隆一
雑誌名 同志社大学ハリス理化学研究報告
巻 57
号 2
ページ 76‑87
発行年 2016‑07‑31
権利 同志社大学ハリス理化学研究所
URL http://doi.org/10.14988/pa.2017.0000014611
1. 緒 言
人と協調して位置決め作業を行うロボットに用い られる制御則として,操作者が付加する操作力を入力 とするインピーダンス制御が広く利用されている 1-6). 従来研究では,人の動作切換に合わせてインピーダン スの値を変更する制御法1-3)や,動作の判別を行わず に簡易な制御モデルによって操作者の力の入力に応答 してインピーダンスの値を調整する可変インピーダン
ス制御 4,5,7)が提案されている.これらの制御法に加
えて,従来のマスダンパ要素から構成される制御式に 仮想的な摩擦力を負荷したインピーダンス制御法も研 究されている.仮想摩擦力を負荷することで,動作時 のブレを低減し動作を高精度化することによってロ ボットの操作性が向上することが知られている6,8). しかしながら,従来のマスダンパ系を基本とした制 御法に関しては,制御パラメータである慣性・粘性の 組み合せの変化が協調作業中の運動動作の特性(以下,
運動特性)や,ロボット操作性に対してどのような影
* Department of Biomedical Engineering, Doshisha University, Kyoto Telephone:+81-774-65-6497, E-mail : [email protected]
** E-mail : [email protected]
Analysis of Maneuverability based on Human Motion Characteristics and Brain Activity in Human-Robot Cooperative Task
Kimiya YOKOO, Toru TSUMUGIWA* and Ryuichi YOKOGAWA**
(Received March 17, 2016)
The purpose of this study is to evaluate maneuverability of positioning tasks with a cooperative robot based on the perspective of motion characteristics, self-rated maneuverability and activities of higher brain functions. The cooperative robots ordinarily were controlled following the impedance model composed of the mass, damping (viscosity) and stiffness coefficient. The correlation effect between the mass and the damping has been evaluated in the previous studies; however, the relation between the damping and the virtual friction, which is applied to reduce vibrations in the operations, has not been investigated. In addition, there are a few of studies which evaluate higher brain functions during the cooperative tasks, even though many studies about the brain machine interface (BMI) have been conducted in recent years. Therefore, in this study, the maneuverability under various conditions of the damping and the friction is evaluated based on the motion characteristics, the higher brain functions measured with fNIRS (functional near infra-red spectroscopy) and the self-rated maneuverability with semantic differential method.
Key words : impedance control, cooperative positioning task, minimum jerk model, higher brain functions, fNIRS
キーワード :インピーダンス制御,人間-ロボット協調位置決め作業,躍度最小軌道モデル,高次脳機能,fNIRS
ロボットとの協調作業における人の運動特性・脳賦活状態と 操作性評価に関する一考察
横尾 公哉,積際 徹,横川 隆一
響を与えるかについての評価は行われているが4),マ スダンパ系に仮想摩擦力が負荷されたインピーダンス 制御法については調べられていない.また,近年
Brain Machine Interface の研究が進展し,人の運動お
よび知覚による脳活動に関する研究9,10)が進められて いるにも関わらず,協調作業用ロボットの操作性と,
操作性を知覚する部位である操作者の脳の活動の関係 性を調べた研究報告は少ない.
そこで,本研究では仮想摩擦力が負荷されたマスダ ンパ系インピーダンス制御において,制御条件を種々 に変化させて実験を行い,運動特性について評価する ことで制御パラメータの違いが協調位置決め作業時の 操 作 性 に 及 ぼ す 影 響 を 調 べ る . さ ら に ,fNIRS (functional near infra-red spectroscopy) 脳血流量計測装 置を用いて協調作業時の操作者の脳表層部の血流量 (以下,脳賦活状態)を評価し,ロボットの操作性評価 と脳賦活状態を比較し,関係性を調べる.
従来研究では,運動特性の評価によってロボットの 操作性が評価されているため,本研究でも同様のアプ ローチを取る.しかし,運動特性に関わる評価指標の 定義が個々の研究によって異なるため,過去に用いら れた指標に基づいた計8つの運動特性評価指標を説明 変数として主成分分析を行い,評価指標を新たな合成 変数として表現することで運動特性を評価した.
fNIRS脳血流量計測装置を用いた脳賦活状態の評価で
は,人の運動機能を担う運動野に加えて,空間や運動 の知覚処理が行われる頭頂連合野および作業への集中 を促す前頭前野背外側部についても評価を行う.その 後,運動特性と脳賦活状態を比較する.さらに,SD 法(semantic differential method)に基づくアンケート
1,2,4,11,12)によって主観的操作性を評価し,操作者の主
観的操作性と脳賦活状態の比較も行うことで,ロボッ トの操作性と脳賦活状態の関係性について複数の観点 から考察する.
以上の手順により,異なる条件下における協調位置 決め作業中の運動特性を評価するだけでなく,人の脳 賦活状態との比較を行うことで,人と協調して作業を 行うロボットの制御法・制御パラメータ設計や操作性 の向上に役立てることができると考えられる.
2. 実験概要
2・1 実験 1:協調位置決め作業中の運動特性評価 2・1・1 ロボット制御システムの概要
本研究で使用したロボットの運動制御には,マスダ ンパ系のインピーダンス特性に,動作時の振動を抑え 安定性を向上させることができる仮想的な摩擦力を付 加したインピーダンス制御6,8)を用いた.
t Dx
t f F
t xM (1) ここで,F:被験者による操作力[N],x:手先位置 [m], M:慣性[kg],D:粘性[Ns/m],f:仮想摩擦力[N]で ある.武居らによると,慣性が10 N以下であれば,
“動かしやすさ”および“目標位置での止めやすさ”
に関する運動特性への慣性による影響は小さいことが わかっている4).そのため本研究では,M = 3 kgとし て実験を行った.実験条件に用いた粘性の値は,本実 験で対象とする協調作業を行うにあたってシステムが 不安定にならない範囲を実験的に求め,その範囲内に おける最小域にあたる30 [Ns/m]を基準値として,等間 隔で値を増加させた粘性D [Ns/m] = 30, 55, 80, 105を実 験条件として設定した.また,仮想摩擦力については,
x y
z Robot
Operator Start position
Target position
Task distance[m]
d(t)= |P - x(t)|
Tip position v(t)
x P x(t) 0
P
Position x(t)[m]
Time t[s]
Min-JerkMin-Jerk:xJerk
tr tr+ ta
d(t)
1 2 3
0.5s
dt t v t
x()0t ( )
Fig. 1. Overview of experiment 1 for evaluating motion characteristics. A subject moves the tip position by operating the robot toward a target and continues the task for 60s. Fig. 1(c) shows an example data of x(t) in the task. Measurement time was separated into tr , required time for reaching the target, and ta , required time for adjusting motion.
(a) Task window (b) Experiment overview (c)An example data of x(t) in the task
目標位置付近での停止時の振動を抑えるためには,2 N以下の仮想摩擦力で十分であることから6,8),仮想
摩擦力f [N] = 0, 1と設定した.仮想摩擦力fは操作力
を打ち消す方向に生じ,一定値の抵抗力を付加するこ とで手先振動の抑制効果がある.仮想摩擦力fを任意 の一定値aと定めるとf は式(2)で表される.
, if F t a t
F t a F
a t F , if t F
f ()
) (
)
() ( )
(
(2)
2・1・2 実験試行
実験1では,3種の作業距離P [m] = 0.02, 0.06, 0.18
と,Table 1に示す粘性・仮想摩擦力の 8種の組み合
わせを掛け合わせた計 24条件で実験を行った.実験 試行の順序は,カウンターバランスを考慮して,ラン ダムな順序で条件を変えて実験を行った.右利きの健 常な成人男性 10名を被験者として,各実験条件につ き 60秒間の試行時間を与え,1回の実験試行中に繰 り返し位置決め作業を行うように指示した.なお,一 回の位置決め作業毎に,“4秒以内に位置決め作業を 完了する”ように制限を設けた.これは,本実験に適 さない過度に遅鈍な動作を排除するためであり,“4 秒間で作業を完了する”といった具体的な動作時間の 指示を目的とした制限ではない.本実験目的は,種々 の制御条件間での運動特性の変化傾向を調べることで あるから,具体的な動作指示によって運動特性を統一 することはせず,動作に関してはこれより他の制限は 設けていない.
実験試行中の被験者への目標位置の提示は Fig. 1(a) に示す方法でディスプレイ上に提示した.試行中,被
験者はディスプレイ上に提示された目標位置に向かっ てロボットを操作し,Fig. 1(a)上の偏差 d(t) が小さく なるように位置決め作業を行う.一連の位置決め作業 中に計側される位置データをFig. 1(c)に示す.作業開 始後,①被験者は目標位置 Pに向かってロボットを 操作し,② d(t) < 0.001 mとなるように調整動作を行 う.その後,③目標位置での停止を 0.5s維持できた 場合,位置決め作業完了と判断する.
試行中の姿勢による運動特性への影響を軽減する ため,手先の可操作度に基づいて作業中の姿勢につい て被験者に指示を行った8).被験者には,背筋を伸ば し,脇を閉めた状態でディスプレイ中央と肩関節軸が 並行になるよう座り,床から0.75 mの高さに位置する 操作ハンドルを握るように指示した.被験者の肩から 操作ハンドルまでの距離は被験者の腕の長さに合わせ ておよそ0.3m~0.4mの範囲に収まるように調整した.
なお,本実験の作業距離は,上述の姿勢を保って位置 決め作業を行うことのできる最大作業距離が 0.2mほ どであることから,作業距離P [m] = 0.02, 0.06, 0.18の 3種類を実験条件として設定した.
2・1・3 位置決め作業中の運動特性の評価指標と実験 試行内容
人が位置決め作業を行う際,(i)目標位置への到達運 動時には腕の粘性を低下させ移動に必要となる力を低 減し,(ii)目標位置での修正・調整の際には剛性を上 昇させることで位置決め精度を向上させていることが わかっている 13).よって,本実験に利用する評価指 標についても,位置決め作業中の2種の動作に関係す る各々の評価指標を,過去の研究で利用された指標に 基づいて以下のように定義した.(i)目標位置までの移
Case I Case II Case III Case IV Case V Case VI Case VII Case VIII
Damping [Ns/m] 30 55 80 105 30 55 80 105
Friction [N] 0 0 0 0 1 1 1 1
Case I Case II Case III Case IV Case V Case VI
Damping [Ns/m] 30 105 30 30 105 30
Friction [N] 0 0 1 0 0 1
Distance [m] 0.02 0.02 0.02 0.18 0.18 0.18
Table 1. Control parameters in the experiment 1. The experiments were conducted in three different task distances; 0.02 m, 0.06 m and 0.18 m, respectively.
Table 2. Control parameters in the experiment 2 (measurements of higher brain activity with fNIRS) .
動動作の評価指標として,移動中最大速度[m/s]: v(t)max,目標位置到着時間[s] 8,14):tr,軌道残差平方和
[m2] 8,11):E ,軌道ばらつき[m2]:Seの4つを定義した.
(ii) 目標位置での調整動作の評価指標として,位置決
め調整量[m]:xa,最大行き過ぎ量[m] 1,14):d(t)max { t | tr
< t },保持中ブレ[m]:xv,位置決め調整時間[s] 14):ta
の4つを定義した.軌道残差平方和E,軌道ばらつき Se,位置決め調整量xaおよび保持中ブレxvの定義式を 式(3)~(6)に示す.
E t
x t -xt
2dt0r Jerk() ()
(3)
n
i i
e E E
S n
1
) 1 (
-
1 (4)
x r avt dt
r t t
a
t () (5) x r a vt dta r
t t
t
v
t 0.5 () (6) ここで,式(3)中のxJerkは躍度最小モデルによって描 かれる躍度最小軌道である.躍度最小軌道は,人間の 基本的な運動である到達運動を簡便に表現でき,急な 加減速が少なく人にとって自然な動作であることが知 られている 15).軌道残差平方和 Eを算出するにあた り,目標位置到着時間tr = 1, 目標位置P = 1としてx(t) を正規化している.躍度最小軌道との誤差平方和であ る Eを算出することで,移動軌道のスムーズさを評 価する.また,人が同じ運動を再現する際に生じるば らつきについても考慮して評価するため 16,17),試行 内でn回行われた位置決め作業から得られた軌道残差 平方和 Eの標準偏差を算出し,これを式(4)の軌道ば らつきSe [m2]として,位置決め作業を繰り返した際の 移動軌道のばらつきを評価する指標として定義した.なお,Se以外の指標は,試行内でn回行われた位置決 め作業から得られるデータの平均値である.式(5)は 目標位置到着以降の調整に要した移動量の総和を表し,
式(6)は目標位置での保持中の振動による微小な移動 の総和を表している.
2・1・4 SD 法に基づく主観的操作性評価方法
実験 2で利用する fNIRS脳血流量計測器(日立メ ディコ製:ETG-7100)の特性上,SD法による主観的操 作性評価の実施を同時に行うことは難しいため,実験 1内の各条件での試行後にアンケートを実施した.本 研究では,操作性に関係する主観的操作感覚の評価項 目である“操作荷重”, “位置合わせのしやすさ”,
“応答性”1)および“動かしやすさ”, “位置決めの しやすさ”, “安定性”12)を参考に,以下で示す5つ の項目についての5段階評価によるSD法で操作性を 評価した.“Q.1目標位置付近での制動性:目標位置 到達時の目標位置での止めやすさ”,“Q.2保持中安 定性:目標位置での保持中の安定のしやすさ”,
“Q.3位置調整性:目標位置付近での位置調整のしや すさ”として,Q.1~Q.3では,(ii)目標位置での調整動 作時の操作感覚を被験者に評価してもらった.“Q.4 速度のスムーズさ:移動中のロボットの安定性(急激 な加減速の抑制)”,“Q.5機動力:移動時のロボット 手先動作の軽さ”として,(i) 目標位置までの移動動作 の操作感覚を被験者に評価してもらった.また,全実 験終了後に各アンケート項目回答の平均値について,
“各項目の回答平均値が等しい”と帰無仮説を設定し て一元配置分析分散を行った結果,p = 0.55となり,
各アンケート項目の回答平均値に有意差は認められな かった.よって,今回の主観的操作性評価では,実験 者の説明不足や被験者の理解不足を原因とする,各ア
x y
z
Robot Operator fNIRS
Experiment start
*Positioning Task for 30s Measurement start
i = 0, i < 3, i++
Rest time for 30s Measurement end Experiment end Pre rest time for 5s
(a) Overview of experiment 2 (b) Experiment 2 process Fig. 2. The overview of the experiment with fNIRS to investigate the higher brain activity of the operators performing a human-robot cooperative positioning task.
ンケート項目回答間におけるばらつきはなかったと考 えられる.
2・2 実験 2:協調位置決め作業中の脳賦活状態評価 2・2・1 実験条件および実験手順
実験2では,fNIRS脳血流量計測装置を用いて計測
を行った.本実験では,実験時間の長時間化による被 験者への負担増が脳機能計測データに影響を及ぼすこ とを避けるため,Table 2に示す作業距離,粘性,仮 想摩擦力の組み合わせにおける計6条件について実験 を行った.各パラメータの選定には,“粘性”,“仮 想摩擦力”,“作業距離”の各々の実験条件の違いが 脳賦活に与える影響を見るため,実験1で用いた実験 条件の最大値・最小値をそれぞれ選定している.本実
験内の位置決め作業は,1回の作業時間を 30秒とし て,それ以外は2・1節と同様の手順で行った.なお,
本実験では脳に関する生体情報を取得するため,同志 社大学「人を対象とする研究」に関する倫理審査委員 会による承認を得て実施している(申請番号 1031).
2・2・2 fNIRS 脳血流量計測装置と脳賦活状態評価方法 本研究では,fNIRS脳血流量計測装置を用いて脳血 流内の酸素化ヘモグロビン(oxy-Hb)の濃度変化を計測 する.高次脳機能が賦活すると,賦活領域に流れる血 流量が増加し酸素消費量を上回る oxy-Hbが供給され,
oxy-Hb 濃度が上昇し,変化することから,脳内の賦
活領域や賦活度合いを知ることができる.計測される
oxy-Hb 変化量 [mMmm]については,先行研究によっ
PC1 PC2 PC3 PC1 PC2 PC3
Adjusting move -0.51 0.01 -0.14 Standard deviation 1.88 1.49 1.01
Overshoot -0.49 0.06 0.03 Proportion of variance 0.44 0.28 0.13
Holding shake -0.36 -0.12 -0.49 Cumulative proportion 0.44 0.72 0.85
Adjusting time -0.50 0.01 0.06
Max velocity -0.34 -0.18 0.56
Reaching time 0.01 -0.43 0.56
E -0.07 0.62 0.20
Se -0.02 0.61 0.26
(a) Factor loading (b) Cumulative proportion
Table 3. Tables of factor loading and cumulative proportion. Note that these tables show only 1st, 2nd and 3rd component.
According to the analysis results, cumulative proportions of 1st and 2nd components have more than 70% of the values.
0 0.01 0.02 0.03 0.04
Adjusting move[m]
0 0.002 0.004 0.006 0.008 0.01
Overshoot [m]
0 0.002 0.004 0.006 0.008
Hold Vibration[m]
0 1 2 3
Adjusting time [s]
0.02 [m]
0.06 [m]
0.18 [m]
S.D.
0 0.1 0.2 0.3
Max Velocity[m/s]
0 1 2 3 4
Reaching time [s]
0 2 4 6 8
E [m2]
0 2 4 6 8
Se[m2]
Max velocity [m/s] Reaching time [s] E[m2] Se[m2]
(a) Adjusting move (b) Overshoot (c) Hold vibration (d)Adjusting time
(e) Max velocity (f) Reaching time (g) Trajectory error (h) Trajectory variability
0 2 4 6
Value [ ]
0 2 4 6
Holding stability
0 2 4 6
Position adjustability
0 2 4 6
Smoothness
0 2 4 6
Mobility
Answer value [-] Answer value [-] Answer value [-] Answer value [-] Answer value [-]
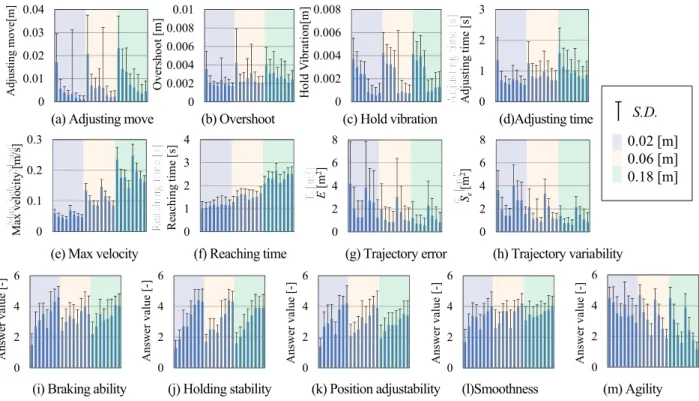
(i) Braking ability (j) Holding stability (k) Position adjustability (l)Smoothness (m) Agility Fig. 3. All subjects’ average data of motion characteristics and self-rated maneuverability in each experiment case. Bar chart areas are colored based on the difference of the task distances. S.D.: standard deviation. Sample size n=10.
Adjustingtime [s]
て脳血流動態計測装置fMRI の計測データとの高い相 関性が認められている 18).本実験では,Fig. 2(b)に 沿った手順で計測を行い,安静時と位置決め作業中の 計測データを比較して評価を行った.計測用プローブ については,国際10-20 法19)に基づいて被験者の頭 に装着した.
3. 実験結果
3・1 運動特性および客観的評価指標の全データ
Fig. 3に,実験1で得られた運動特性評価指標およ
び主観的操作性評価指標について,各 24条件におけ る全被験者 10人の平均値を示す.グラフ内は作業距 離条件により色分けされ,同色のエリア内では,右か らCase I~Case VIII (Table 1)の順番で並んでいる.こ れらのデータに基づき,次節以降の解析・考察を行っ た.
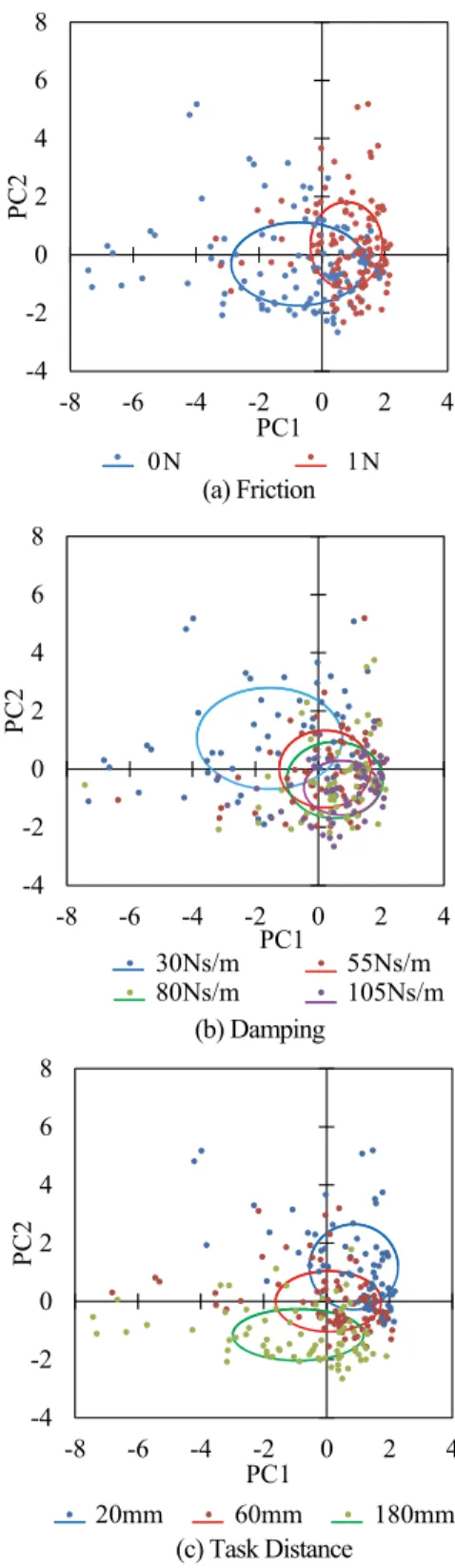
3・2 運動特性評価指標に基づく主成分分析結果 24条件・被験者10人の各実験試行データを1つの 標本とする計240個の標本に基づき,各標本の持つ8 個の運動特性評価指標データを説明変数として,各変 数を基準化して主成分分析を行った(Table 3・Fig. 4). Table 3(a)には各評価指標の因子負荷量,Table 3(b)には 寄与率を示している(第四主成分以下のデータは省略). 今回の主成分分析の結果,第2主成分までの累積寄与 率が70%を超えるため,第1主成分および第2主成分 のみに着目して考察を進めることとした.
Fig. 4については,Fig. 4(a):仮想摩擦の有無,Fig.
4(b):粘性,Fig. 4(c):作業距離によって主成分得点の
プロットを色分けして示した.得点分布の傾向を分析 するために,各主成分得点プロットの平均値を中心座 標,標準偏差を2倍した値を長径及び短径として楕円 を描画した.
3・3 協調位置決め作業中の脳賦活状態評価
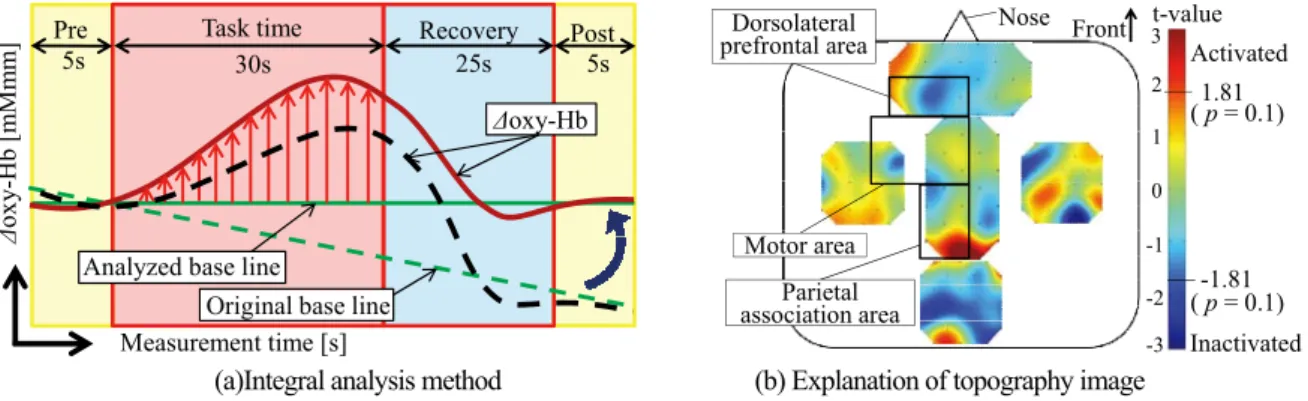
Fig. 5(a)に fNIRS計測データの解析方法の解説と,
Fig. 5(b)に fNIRS計測装置による計測結果のデータ例
を示す.Fig. 6には,実験2のfNIRS計測データの解
析結果を示している.
Fig. 5(a)内のグラフは,各計測チャネルで計測され
るoxy-Hb変化量の解析前(黒破線)と解析後(赤線)の時 系列データを示している.解析では,計測時系列を課
題開始前(Pre),課題実行(Task),課題終了後の回復期
間(Recovery),回復期間後(Post)に分割し(Fig. 4(c)参照), 安静状態であるPreとPostのoxy-Hb変化量を結ぶ近
似直線をベースラインとする処理を行っている 20). その後,安静時と位置決め作業中の脳賦活状態の違い を評価するため,このベースラインを基軸(oxy-Hb 変
化量 = 0 mMmm)として課題実行中の oxy-Hb変化量
(Fig.内赤矢印)の平均値を求め,課題実行中oxy-Hb変
-4 -2 0 2 4 6 8
-8 -6 -4 -2 0 2 4
PC2
w/o FrictionPC1 w/ Friction (a) Friction
-4 -2 0 2 4 6 8
-8 -6 -4 -2 0 2 4
PC2
30Ns/m PC1 55Ns/m
80Ns/m 105Ns/m
-4 -2 0 2 4 6 8
-8 -6 -4 -2 0 2 4
PC2
PC1
20mm 60mm 180mm
Fig. 4. Result of principal component analysis in the experiment 1. The analysis was conducted based on the 240 samples (24 cases of 10 subjects) with the 8 motion characteristics data (see section 2・1・3) as the explanatory variables.
(b) Damping
(c) Task Distance
0 N 1 N
化量とベースライン(安静時)とのt検定を行った21).
Fig. 5(b)内の黒枠で囲まれた部分は,人の脳の前頭
前野背外側部,運動野,頭頂連合野を示している(本 実験では全て右手のみを利用して動作を行ったので,
左半球領域のみを囲んでいる).図内の黒点は計測 チャネルを表し,各チャネルごとに,安静時と試行中
のfNIRS計測データの平均値の差の統計量t値を算出
し,そのt値に基づいて脳賦活状態を色の濃淡で表現 している.なお,各チャネル間は画像処理により濃淡 補完を行っている.Fig. 5(b)および Fig. 6内の色の濃
淡は,Fig. 5右部のカラーバー上の t値に対応してお
り,t値が1.81を超えて赤く示された領域では,“安 静時と試行中のfNIRS計測データ平均値が等しい”と 帰無仮説を設定し,有意水準を0.1として両側検定を 行った場合に,安静時に比べて試行中に脳が統計的有 意に賦活していたことが示されている.
4. 考察
4・1 主成分分析結果の解釈
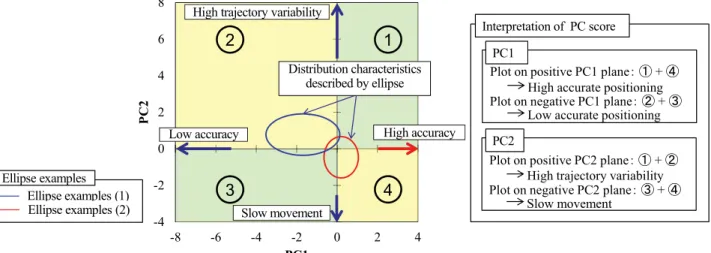
以下に,本実験の主成分分析結果の解釈について述
べ,Fig. 7によって説明を行う.簡略化のため,Fig. 7
内では各標本の主成分得点プロットを省略し,主成分 得点プロットから描かれる楕円のみを示している.
Table 3(a)内の各評価指標の第 1主成分(以下,PC1)へ の因子負荷量によると,PC1は目標位置での調整動作 の運動特性を評価する総合指標であり,PC1得点の値 が正方向に大きいほど目標位置での調整動作が高精度 であり(Fig. 7:PC1軸正方向上赤矢印),PC1得点の値 が負方向に小さいほど目標位置での調整動作が低精度
である(Fig. 7:PC1軸負方向上青矢印)と解釈できる.
一方で,第 2主成分(以下,PC2)への因子負荷量によ ると,PC2は目標位置への移動時の運動特性を評価す
Pre Task time Recovery Post
Original base line
5s 30s 25s 5s
Δoxy-Hb
Δoxy-Hb[mMmm]
Measurement time [s]
Analyzed base line
(a)Integral analysis method (b) Explanation of topography image
Fig. 5. Overview of fNIRS evaluation. (a) Integral analysis method was used for the comparison of brain activity between task time and rest time. (b)The image shows the degree of the higher brain activity during the experiment tasks.
Nose Front
Motor area
t-value Activated
Inactivated 3
2 1 0 -1 -2 -3 Dorsolateral
prefrontal area
Parietal association area
( p1.81= 0.1)
( p-1.81= 0.1)
Case I Case II Case III
t-value 3 2 1 0 -1 -2 -3
1.81
-1.81
Case IV Case V Case VI
Fig. 6. Results of fNIRS evaluation in the human-robot cooperative task. The level of brain activity was illustrated by the color density which shows the magnitude of the t-value.
る総合指標であると解釈できる.PC2得点の値が負方 向に小さい場合,目標位置までの到着に時間を要した ことを意味し(Fig. 7:PC2軸負方向上青矢印),PC2得 点の値が正方向に大きい場合,移動時の軌道のばらつ きが大きく躍度最小軌道と異なる軌道で動作を行った ことを意味している(Fig. 7:PC2軸正方向上青矢印). このことから,PC2得点が0に近いほど,目標位置へ の移動が素早く且つスムーズで安定していると解釈で きる.例えば,Fig. 7の楕円(1)は,楕円(2)に比べて位 置決め調整動作が低精度であり,躍度最小軌道との誤 差は大きいが,目標位置までの移動に要した時間が短 いと解釈できる.
4・2節の考察では,主成分軸によって分割された各 制御パラメータの分布楕円(Fig. 4参照)の面積比率(各 象限により分割された楕円面積÷楕円全面積)を算出
し(Table 4参照),その比率を比較することで制御パラ
メータ変化による運動特性変化の傾向を調べた.
4・2 制御パラメータと運動特性の関係
4・2・1 仮想摩擦力による位置決め調整動作の向上 制御パラメータの違いが運動特性に及ぼす影響を 評価するため,各制御パラメータの分布楕円の面積比 率を算出し(Fig. 7参照),制御パラメータ変化による
運動特性変化の傾向を調べた.Table 4に比率の算出 結果を示す.Table 4によると,摩擦無し条件では楕 円面積の 72%が負の PC1座標上に分布しているのに 対し,摩擦有り条件では 90%が正の PC1座標上に分 布している.このことから,仮想摩擦力が付加される ことで,ロボット操作時の手先の振動が抑制され,位 置決め調整動作が向上したことが示唆された.
4・2・2 粘性による安定性と機動力への相反効果 Fig. 4およびTable 4によると,粘性D = 30 Ns/mの 条件では, 87%が負のPC1座標上,84%が正のPC2座 標上に分布している.これは粘性が小さいために移動 時の制御が不安定になり,位置決め調整性能が低下す る一方で,低粘性により動作時の抵抗力が小さくなっ たことが原因となり,目標位置に早く到着しているこ とを示している.次に,D = 55 Ns/m,80 Ns/m,105 Ns/mの条件を順に観察すると,正の PC1座標上の分 布が59%,72%,84%と増加していることから,粘性 の増加に合わせて位置決め調整動作が向上しているこ とがわかる.しかし,PC2座標上の分布を見ると,D
= 55 Ns/mの条件では正負の両方向にほぼ均一に分布
しているのに対して,粘性の増加に伴って負の PC2 座標上へと分布が偏り,D = 105 Ns/m の条件では全体
-4 -2 0 2 4 6 8
-8 -6 -4 -2 0 2 4
PC2
PC1
2 1
3 4
High trajectory variability
Low accuracy High accuracy
Slow movement Ellipse examples
Ellipse examples (1) Ellipse examples (2)
Interpretation of PC score
Plot on positive PC1 plane: ①+ ④ High accurate positioning Plot on negative PC1 plane: ②+ ③
Low accurate positioning
Plot on positive PC2 plane: ①+ ② High trajectory variability Plot on negative PC2 plane: ③+ ④
Slow movement PC2
Distribution characteristics PC1 described by ellipse
Fig. 7. Interpretation of PCA result and comparison methods. According to each motion characteristics’ factor, positive PC1 plane represents high positioning accuracy, negative PC1 plane represents low positioning accuracy, positive PC2 plane represents high trajectory variables and negative PC2 represents slow movement, respectively.
f = 0N f = 1N D = 30Ns/m D = 55Ns/m D = 80Ns/m D = 105Ns/m
% on +PC1 plane: ① + ④ 0.28 0.90 0.13 0.59 0.71 0.84
% on -PC1 plane: ② + ③ 0.72 0.10 0.87 0.41 0.29 0.16
% on +PC2 plane: ① + ② 0.36 0.64 0.84 0.50 0.32 0.13
% on -PC2 plane: ③ + ④ 0.64 0.36 0.16 0.50 0.68 0.87
Table 4. Ratio of the ellipses in each PC plane (Ratio = area on each plane /sum area).
の 87%が負の PC2座標上に分布している.つまり,
粘性の増加に伴って目標位置への到達が遅くなってお り,高粘性による操作抵抗の増加が移動時の機動力を 低下させていると解釈できる.このことから,ある一 定値以上で粘性を増加させる場合,粘性の増加に応じ て目標位置での調整動作を向上させることは可能とな るが,一方で操作抵抗の増加が移動を妨げ,移動時の 機動力が悪化することがわかる.よって,すでに設定 された粘性値で十分な安定性を保った制御が可能な場 合,粘性を増加させるだけでは操作性向上は見込めな いことがわかる.
4・2・3 粘性条件と仮想摩擦力の相乗効果
D = 55 Ns/m,80 Ns/mに仮想摩擦力が付加された条 件のデータのみを選択し,Fig. 4内のものと同様の手 順で楕円を描画したものを,D = 105 Ns/mの条件と合
わせて Fig. 8に示す.摩擦力が付加された場合,D =
55 Ns/m,80 Ns/mの両条件ともにPC1座標方向のば
らつきがD = 105 Ns/mの条件に比べて小さくなって
いることがわかり,その分布もD = 55 Ns/mでは94%, D = 80 Ns/mでは100%が正のPC1座標上に存在し,
摩擦力が付加されることで位置決め精度が向上してい ることが示されている.PC2座標に注目すると,D =
55 Ns/m の条件では 67%,D = 80 Ns/mの条件では
48%が正のPC2座標上に存在する.D = 105 Ns/mの条件 に比べてD = 55 Ns/m,80 Ns/mの両条件ともにPC2 座標の上側に位置することから,目標位置への到着時
間が相対的に短いことがわかる.つまり,粘性ではな く摩擦力を付加することで,移動時の抵抗力を粘性ほ ど増大させることなく目標位置での調整動作を向上さ せることが可能になることが示されている.
4・3 計測機器特性を考慮した脳賦活状態の評価 本研究で用いた fNIRS 計測装置の検出範囲は頭皮
下25 mm~30 mmの大脳皮質であり,空間分解能は30
mmである.そのため,国際 10-20法に基づき計測 用プローブを装着した場合でも,被験者の頭の形状な どの個人差によって計測脳領域の位置にズレが生じる ことは避けられない.そこで,Fig. 6の黒枠で囲まれ た前頭前野背外側部,運動野および頭頂連合野につい て,各脳領域枠内の全チャネルで計測された試行中の
fNIRS計測データを用いて,安静時と試行中のfNIRS
計測データの平均値の差の統計量t値を,各脳領域ご とに算出した.その結果をFig. 9に示す.Fig. 9内グ ラフ上部に,p < 0.2となるケースのみp値を示した.
これより以下の考察では,Fig. 9に示される脳賦活状 態と,協調作業中の運動特性評価およびSD法による 主観的操作性評価を比較し,ロボットの操作性が脳賦 活状態に及ぼす影響を調べる.
4・4 運動特性・主観的操作性と脳賦活状態の関係 4・4・1 操作力付加の増加による運動野の賦活
Fig. 9より,作業距離の短い条件で位置決め作業を
行ったCase I, II, IIIと作業距離の長い条件で位置決め
作業を行った Case IV , V, VIを比較すると,作業距離 の長短によって運動野の賦活に違いが見られる.特に,
Fig. 9より,作業距離0.18 mおよび粘性D = 105 Ns/m であるCase Vのt値が大きく,また,Fig. 10(a)より,
Case VのQ.5機動力に対する主観的操作性評価が他の
条件よりも50%以上小さい.このことから,作業距 離が長く,高粘性による移動時の操作抵抗が大きいた めに,目標位置への移動時に付加する操作力が増大し,
それに伴って運動野が賦活したと考えられる.
4・4・2 調整精度低下による頭頂連合野の賦活 頭頂連合野では,運動野と同様に作業距離の長い Case IV, V, VIでは賦活しており,p 値がおよそ0.1と なっている.頭頂連合野は,空間知覚や運動知覚に関 わる情報処理を行い,運動野での運動の調節や前頭前 野での注意の制御に結びついて情報処理が行われる領 域である.ここで,Fig. 4(c)の作業距離別の運動特性 の違いを観察すると,作業距離の短い 0.02 mのグ
D= 55 Ns/m + f= 1 N D= 80 Ns/m + f= 1 N D= 105 Ns/m
-3 -1 1 3
-3 -1 1 3
PC2
PC1
Fig. 8. Correlation effect between the friction and the damping. The illustrated data shows the conditions of D = 55 Ns/m with friction f = 1 N, D = 80 Ns/m with f = 1 and D = 105 Ns/m (including f = 0 N and 1 N).
ループと比べて,0.18 mのグループは PC1座標上の ばらつきが負の方向に 1.87倍大きく,目標位置での 調整動作の精度が低下していることがわかる.つまり,
作業距離が長くなり位置決め調整動作が難化すること で,運動動作の知覚と視覚による空間知覚の情報を結 び付けるという,より高度な処理が必要となった結果,
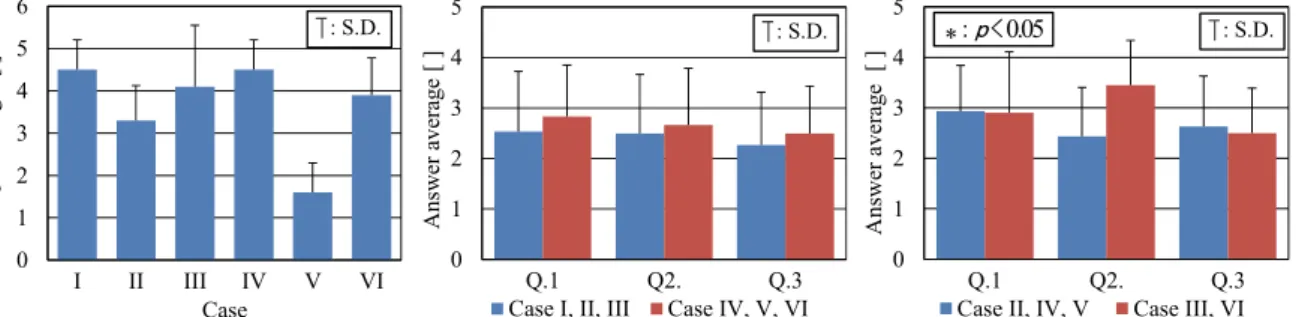
頭頂連合野が賦活したと考えられる.一方,Fig. 10(b) より,作業距離の違いによる目標位置での調整動作に 関する主観的操作性評価には差が見られないことから,
目標位置での運動特性の違いを操作者は認識していな いことがわかる.このことから,操作者が操作性の違 いを自覚していない場合でも,操作性の違いによって 脳が賦活する可能性が示唆された.
4・4・3 保持不安定さによる前頭前野背外側部賦活 前頭前野背外側部では,前述の運動野および頭頂連 合野と違い,作業距離の違いによる賦活状態の違いは 見られない.しかし,Case II, IV, Vではp < 0.1となっ ており,有意水準を0.1とした場合,これらの条件で は前頭前野背外側部が有意に賦活していたことが認め られる.これらの3条件は,摩擦力負荷の無い条件下 で位置決め作業が行われたという点で共通しており,
対して,摩擦力負荷有りの条件Case III, VIでは前頭前 野背外側部は賦活していない.このことから,摩擦力 負荷の有無による位置決め調整動作の違い(4・2・1節参 照)によって異なる脳賦活状態を示した可能性が高い.
Case II, IV, VのグループとCase III, VIグループについ て目標位置での調整動作に関する主観的操作性評価を 比較すると,Fig. 10(c)より,この2つのグループでは Q.2 目標位置での保持中安定性に有意な差が認められ,
摩擦力負荷が無い場合,目標位置保持の際のロボット の不安定さを被験者が認識していることが示されてい る.保持中の安定性が悪い場合,目標位置で停止を維 持するためにはロボットの振動を抑えるため,操作者 は操作ハンドルを握る手に意識を集中させる必要があ る.前頭前野は人の行動や思考を担う脳領域であり,
その中でも前頭前野背外側部は,自発的な運動や認知 に関する情報を処理し作業への集中を促す役割を持つ.
このことから,目標位置での保持中の不安定さによる 操作性低下が脳を賦活させたと考えられる.
4・5 潜在意識下での運動特性知覚による脳の賦活 4・4節の考察より,前頭前野背外側部の賦活状態の 違いによって主観的操作性評価にも差が見られたが,
-3 -2 -1 0 1 2 3
CaseⅠ CaseⅡ CaseⅢ CaseⅣ CaseⅤ CaseⅥ
t value
Dorsolateral prefrontal area Motor area Parietal association area p= 0.01
p= 0.14
p= 0.13 p= 0.12 p= 0.02
p= 0.09 p= 0.07
0 1 2 3 4 5 6
I II III IV V VI
Q.5 average [ ]
Case
: S.D.
0 1 2 3 4 5
Q.1 Q2. Q.3
Answer average [ ]
Case I, II, III Case IV, V, VI 0 1 2 3 4 5
Q.1 Q2. Q.3
Answer average [ ]
Case II, IV, V Case III, VI
:p <0.05
*
: S.D. : S.D.
Fig. 9. Activity level in each brain region. The t-value is calculated by comparing the average oxy-Hb during the task time and the rest time. In the t-value calculation, all channel data in the black frame of the brain regions is included.
Fig. 10. Average result of self-rated maneuverability by semantic differential method.
(a) Q.5 Mobility: individual case (n=10) (b) Q.1 ~ Q.3: group by task distance (n=30) (c) Q.1 ~ Q.3: group by brain activity (Case II, IV, V : n=30, Case III, VI : n=20)
一方で頭頂連合野では,異なる脳賦活状態が示された にも関わらず主観的操作性評価にはその違いが反映さ れていなかった.この2つの脳領域において,脳賦活 状態と主観的操作性評価に異なる関係性が見られた要 因として,次の2点が考えられる.1点目として,操 作性の言語化の限界が挙げられる.アンケートによっ て主観的操作性を評価する場合,操作性を形容する言 葉を明確に定義し,全ての操作者が評価対象の操作性 について共通の理解を持つ必要がある.しかしながら,
操作性は操作者の運動知覚による直感的なものであり,
操作性の言語化は容易ではない22).2点目として,潜 在意識による運動の知覚が挙げられる.人の運動制 御・判断の大半は無意識的に行われ,操作性の知覚が 顕在意識にのぼるとは限らない 23).人の思考・認知 をつかさどる前頭前野背外側部での脳賦活状態の違い が主観的操作性評価にも反映され,対して運動知覚を つかさどる頭頂連合野では脳賦活状態と主観的操作性 評価に関係性が見られなかったことからも,頭頂連合 野での賦活は潜在的な運動知覚を示していると考えら れる.このことから,言語化が難しい,より直感的な 操作性や潜在意識下での運動特性の知覚を,脳賦活状 態によって評価できる可能性が示唆された.
5. 結 言
本研究では,作業条件および制御パラメータの組み 合わせを変化させ,様々な条件下で人-ロボット協調 位置決め作業を行うことで,制御パラメータの違いに よる運動特性への影響とその傾向を調べた.さらに,
協調作業中の操作者の脳賦活状態についても調べ,運 動特性および主観的操作性との比較を行った.その結 果,ある一定値以上の粘性を設定し,すでに安定な制 御が実現している場合,粘性ではなく仮想摩擦力を付 加することで目標位置での調整時の運動特性が向上す ることが示された.
また,協調作業中の脳賦活状態については,運動特 性の違いによって運動野,前頭前野背外側部,頭頂連 合野にて異なる脳賦活状態の様子が観察された.特に,
前頭前野背外側部と頭頂連合野の比較によって見受け られた脳賦活状態と主観的操作性評価の関係性から,
操作者が感じる直感的な操作性や潜在意識下での運動 特性の知覚について,脳賦活状態によって評価できる 可能性が示唆された.このことから,従来の方法では 評価することができなかった,より潜在的な操作性の
評価を目的とした脳賦活状態評価の利用可能性が示さ れた.
本研究の一部は,2014年度理工学研究所研究助成 金の補助により行われた.ここに記して謝意を表す.
参考文献
1) 山田陽滋, 鴻巣仁司, 森園哲也, 梅谷陽二, “自動車組立 工程における搭載作業のためのスキルアシストの提 案”, 日本機械学会論文集C編, 68[666], 509-516 (2002).
2) 関弘和, 高橋一樹, 多田隈進, “動作モード切換えに基づ く人間協調型ロボットの軌道制御法”, 電気学会論文 誌.D, 産業応用部門誌, 26[12], 1682-1689 (2006).
3) 奥田裕之, 早川聡一郎, 鈴木達也, 土田縫夫, “人間行動 のハイブリッドシステムモデルに基づいた人間-機械 協調型ロボットシステムの切替型制御器設計”, 電気 学会論文誌. D, 産業応用部門誌, 128[6], 810-818 (2008).
4) 武居直行, 菊植亮, 佐野明人, 望山洋, 澤田英明, 藤本英 雄, “位置決め作業アシストのための操作力依存可変 ダンピング制御”, 日本ロボット学会誌, 25[2], 306-313 (2007).
5) 前田雄介, 原崇之, 新井民夫, “躍度最小モデルを用いた 動作予測に基づく人間-ロボット協調作業”, 日本機械 学会論文集C編, 68[675], 3367-3372 (2002).
6) N. Takesue, R. Kikuuwe, A. Sano, H. Mochiyama and H.
Fujimoto, “Tracking Assist System using Virtual Friction Field”, IEEE/RSJ International Conference on Intelligent Robots and Systems, 3927-3932 (2005).
7) T. Tsumugiwa, R. Yokogawa and K. Yoshida, “Stability Analysis for Impedance Control of Robot in Human-Robot Cooperative Task System”, Journal of Advanced Mechanical Design Systems and Manufacturing, 1[1], 113- 121 (2007).
8) 岡本健太郎, 積際徹, 横川隆一, “人とロボットの協調位 置決め作業における人の運動習熟に関する一考察”, 日本機械学会論文集C編, 79[803], 155-168 (2013).
9) 鈴木隆文,“運動出力型ブレインマシンインタフェー
ス”,日本神経回路学会誌, 19[3], 112-117 (2012).
10) 平田雅之, 柳澤琢史, 松下光次郎, 菅田陽怜, モリス シェイン, 神谷之康, 鈴木隆文, 吉田毅, 佐藤文博, 森脇 崇, 梅垣昌士, 齋藤洋一, 貴島晴彦, 影山悠, 川人光男, 吉峰俊樹, “ブレイン・マシン・インターフェースの 基礎と臨床応用”, 脳神経外科ジャーナル, 22[3], 192- 199 (2013).
11) S. A. Bakar, R. Ikeura, Y. Handa, T. Yano, K. Mizutani and H. Sawai, “Communication during the Cooperative Motion in the Task of Carrying an Object between Two Humans”, Journal of Biomechanical Science and Engineering, 5[2], 104-118 (2010).
12) R. Ikeura, H. Inooka and K. Mizutani, “Subjective Evaluation of Maneuverability of a Robot Cooperating with Human”, IEEE International Workshop on Robot and Human Interaction, 201-205 (1999).
13) M. M. Rahman, R. Ikeura and K. Mizutani, “Investigation of the Impedance Characteristic of Human Arm for Development of Robots to Cooperate with Human”, IEEE International Conference on Systems, Man, and Cybernetics, 2, 676-681 (1999).
14) S. Suzuki, K. Kurihara, K. Furuta, F. Harashima and P.
Yaodong, “Variable Dynamic Assist Control on Haptic System for Human Adaptive Mechatronics”, IEEE Conference on Decision and Control and European Control Conference, 22[6], 1176-1188 (2006).
15) T. Flash and N. Hogan, “The Coordination of Arm Movements: an Experimentally Confirmed Mathematical Model”, The Journal of Neuroscience, 5[7], 1688-1703 (1985).
16) 大山剛史, 宇野洋二, “到達運動のばらつきに関する軌 道の類似性保持に基づく解析”, 電子情報通信学会論 文D, 情報・システム, 90[4], 1124-1134 (2007).
17) 大山剛史, 宇野洋二, “ヒト腕の軌道の類似性に着目し た到達運動のばらつきの解析”, 電子情報通信学会技 術 研 究 報 告 NC, ニ ュ ー ロ コ ン ピ ュ ー テ ィ ン グ, 105[659], 31-36 (2006).
18) 灰田宗孝, “脳機能計測における光トポグラフィ信号 の意味”, MEDIX, 36, 17-21 (2002).
19) 福田正人,心の健康に光トポグラフィー検査を応用 する会,NIRS波形の臨床判読―先進医療「うつ症状 の光トポグラフィー検査」ガイドブック, (中山書店,
東京都,2011), p. 9.
20) 西牧謙吾,渥美義賢,“脳科学と障害のある子どもの 教育に関する研究”,独立行政法人国立特殊教育総合 研究所課題別研究報告, 43-55 (2007).
21) E. Watanabe, Y. Yamashita, A. Maki, Y. Ito and H. Koizumi,
“Non-invasive Functional Mapping with Multi-channel Near Infra-red Spectroscopic Topography in Humans”, Neuroscience Letters, 205[1], 41-44 (1996).
22)滝沢文雄, “運動実践における言語の役割とその限界”, 体育・スポーツ哲学研究, 31[1], 75-85 (2009).
23) 門田浩二, “潜在的な視覚運動制御からみたスポーツ 動 作”, スポ ーツ 心理 学研 究, 37[2], 123-131 (2010).