Hi-net データによる走時変化計測の高精度化
名古屋大学大学院環境学研究科*國 友 孝 洋
An Improvement in the Precision of Measuring Seismic Travel
Time Changes with the Use of the Hi-net Data
Takahiro KUNITOMO
Graduate School of Environmental Studies, Nagoya University, D2-2 (510) Furo-cho, Chikusa-ku, Nagoya, Aichi 464-8601, Japan
(Received July 7, 2013; Accepted January 7, 2014)
NIED Hi-net is the nation-wide high sensitivity seismograph network which has been constructed by the National Research Institute for Earth Science and Disaster Prevention. The high quality observation data of the Hi-net brought us outstanding contribution to seismology. Recently, the detection of minute changes of seismic travel times with the use of the Hi-net data is tried by various methods such as seismic ACROSS (Accurately Controlled, Routinely Operated, Signal System), seismic interferometry and so on. Although time accuracy is essential for precise measurement of temporal variations of seismic travel times, reliability evaluation of the sampling timing of the Hi-net data has been not always sufficient so far. This paper reports the temporal variations of the sampling timings at the twenty Hi-net stations for the eight years from 2004 to 2012 and proposes an approach to detect minute changes in seismic travel times in sub-millisecond order. The sensor check signal which is usually used to calibrate the seismometer, is enabled on 1PPS of GPS receiver independently of the sampling clock. Therefore the sampling clock can be calibrated by the GPS clock using the delay time of the sensor check signal. The delay times are usually stable, but stepwise changes were observed at restarts of ADC (Analog-to-Digital Converter). This method was applied to the TOKI seismic ACROSS signals observed by Hi-net Yaotsu (11.3 km distance from TOKI). Consequently, sub-millisecond to several milliseconds stepwise travel time changes were removed, and travel time changes owing to large earthquakes, and annual and secular travel time changes became clear. This correction method is useful to not only the seismic source‒receiver system such as ACROSS but also other methods to detect seismic travel time changes of utilizing arrival time difference between observation stations.
Key words: Sampling clock, Sensor check signal, GPS, Cross spectrum, ACROSS
§1. は じ め に
独立行政法人防災科学技術研究所の Hi-net は,約 20 km のスパンで日本全国に展開された高感度地震観測網 であり,深部低周波微動をはじめとする様々な地震現象 の発見や地下構造の解明など,地震研究に大きな役割を 果たしている[Okada et al. (2004),Obara et al. (2005),汐 見・他 (2009)].その高精度の連続観測データは一般に 公開されており,従来の自然地震の研究にとどまらず, 様々な研究目的に広く用いられている.地殻の地震波速 度の変化の検出を行う試みもその一つである.例えば, Ohmi et al. (2008) は,地震波干渉法を用いた方法で,能 登半島地震(2007 年 3 月 25 日,Mw=6.6)の際に震央近 傍の Hi-net 観測点で,地動ノイズの自己相関関数 (ACF) から得られた特定のフェーズの lag time に顕著な増加 があったことを報告している.同じく地震干渉法を用い た方法で,Minato et al. (2012) は,東北地方太平洋沖地 震(2011 年 3 月 11 日,Mw=9.0)および福島・茨城県境 付近での大きな余震の際に,震源近傍の Hi-net 観測点で 1.5% の地震波速度変化があったことを報告している. また,地球惑星科学連合大会や日本地震学会秋季大会で は,東北地方太平洋沖地震の際に,アクロスや相似地震 を用いた方法で ms から数十 ms オーダーの走時遅れが あったこと,地震波干渉法を用いた研究により,日本の 広域で dv/v の変化があったことなどが報告されている 地 震 第 2 輯 第 66 巻(2014)97-112 頁 DOI: 10.4294/zisin.66.97 〒464-8601 愛知県名古屋市千種区不老町 D2-2 (510) *
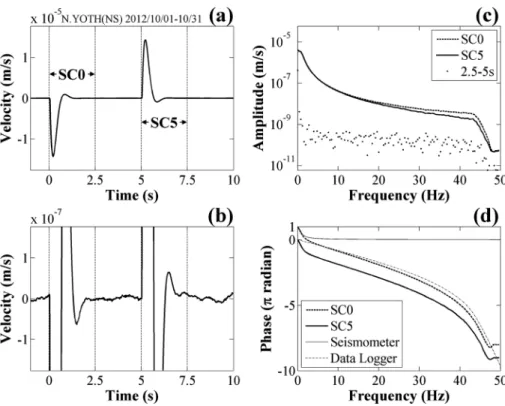
[例えば,國友 (2012a, 2012b, 2012c),西村 (2012),上野・ 他 (2012)].さらに,弾性波アクロスを用いた 8 年以上 におよぶ連続観測から−0.3 ms/年以下の地震波速度の 微小な経年変化を,送信点からの距離が 57 km の Hi-net 観測点で検出した結果も報告されている[例えば,國友 (2012b, 2013)]. こうした微小な走時変化の検出には,観測装置の精度 の評価が重要であることは言うまでもないが,Hi-net の 収録装置は,GPS により時刻校正が行われているとはい うものの,どこまで微小な走時変化の議論に耐えうる時 計の信頼性があるかについての詳細な報告はされていな い.時計の精度は現代科学技術の根幹の一つであり,地 震計測においても,サンプリング・クロックの信頼性の 議論は必要不可欠である.地震データ収録装置に内蔵さ れている一般的な時刻同期用の GPS レシーバから出力 される 1PPS(1 秒パルス)は,カタログや文献[例えば, 近藤 (2010)]によれば,GPS 衛星捕捉時には数 10 ns∼1 μs の精度で協定世界時に時刻同期することが保証され ている.よって,収録装置の時刻精度は,サンプリン グ・クロックを GPS レシーバの 1PPS と完全に時刻同期 させれば,1 μs 以内に収めることが可能である. 本研究では, 2004 年から 2012 年までの東海地域の Hi-net のデータを解析し,収録装置のサンプリング・タ イミングが GPS 時刻に対してどの程度変動しているか を議論する.また,本研究の手法を用いることにより, Hi-net のサンプリング間隔 (10 ms) をはるかに下回る走 時の微小変化(例えば 0.1 ms 以下)を検出できる可能性 を示し,既に流通しているデータをより高精度に活用す る方法を提案する.本研究が,今後の収録装置の開発や Hi-net データのさらなる活用の一助となれば幸いであ る. なお,本研究で扱う Hi-net の地震計や収録装置の概要 は,Obara et al. (2005) や汐見・他 (2009) を参照された い.収録装置は,これまでに 2 回更新されており,タイ プ 1,タイプ 2,タイプ 3 と変遷し,現在はタイプ 3 が稼 働している.その概略と周波数特性は,Hi-net のウェブ に公開されている[http://www.hinet.bosai.go.jp/(参照 2013-12-15)]. §2. センサーチェック信号 本研究では,Hi-net の収録装置のサンプリング・ク ロックを評価するために,毎日午前 9 時のデータに記録 されているセンサーチェック信号を利用する.センサー チェック信号は,地震計の校正や収録装置の正常性の検 査に用いられる信号で,収録装置の DAC (Digital-to-Analog Converter) 機能で生成した直流電圧を,メカニ カルリレーを通して検定コイルに印加することで生成さ れる.メカニカルリレーは,収録装置に内蔵された GPS レシーバの 1PPS 出力で動作し,午前 9 時(正時)に ON,5 秒後に OFF となり,収録装置から 5 秒幅の矩形 波電圧が出力される[株式会社計測技研(私信)].この 矩形波電圧が検定コイルに印加される結果として,地震 計の振り子には,パルス的な力が 0 秒と 5 秒に作用し, その応答波形がセンサーチェック信号として記録され る. センサーチェック信号の波形とスペクトルの例を Fig. 1 に示す.Fig. 1a には,Hi-net 八百津 (N.YOTH) の NS 成分のセンサーチェック信号を,2012 年 10 月 1 日から 31 日までの 31 回分スタッキングした波形で示した.午 前 9 時 0 秒からの 10 秒間に検定コイルへの矩形波電圧 の立ち上がりと立ち下がりに対応する極性の異なる信号 が入っている.0 秒および 5 秒から始まるセンサー チェック信号を,本論文では独立に扱い,それぞれ SC0 および SC5 と呼称する.振幅を拡大した Fig. 1b に示さ れるように,センサーチェック信号は,2 ないし 2.5 秒後 にはノイズレベル以下に収束している.このように 2.5 秒間に波形全体を含めることができ,時間窓の両端でセ ンサーチェック信号の振幅がゼロ(正確には同じ DC オ フセット値)にあると見なせることから,スペクトルは, SC0 は 0 秒から 2.5 秒まで,SC5 は 5 秒から 7.5 秒まで, の 2.5 秒間の方形窓で計算した.離散フーリエ変換に は,2 を基数とする FFT (Fast Fourier Transform) が用 いられることが多く,データ数が 2 のべき乗個であるこ と が 要 求 さ れ る.し か し,本 研 究 で は,混 合 基 数 (Mixed-radix) FFT のアルゴリズムを用いて 2.5 秒間 (250 点)のデータを離散フーリエ変換しており,ゼロパ ディング等の操作は行っていない.この場合,方形窓を 使用すれば,DC オフセット値は,周波数 0 Hz の成分に 変換され,他の周波数成分には影響しない.方形窓以外 の窓関数を用いた場合は,DC オフセット値が適切に除 去されない限り,対象とする周波数成分にも影響がでて くるので注意が必要である.以降の解析は全てこの方法 で行っている.センサーチェック信号の振幅スペクトル (Fig. 1c) は,地震計の固有周波数である 1 Hz をピーク として,高周波数ほど小さくなっている.なお,高周波 側で SC0 と SC5 の振幅が一致していないが,ほぼ一致 する観測点もあれば Fig. 1 の例よりも違いが大きい観 測点もあった.原因としては,検定コイルに印加される 矩形波電圧の立ち上がりと立ち下がりの波形の違い,検 定コイルに流れる電流の方向によって振り子に加わる力 の波形が異なる,地震計の特性が振り子に加える力の方 向によって異なるなどが考えられるが,いずれにせよ本
研究で用いる 20 Hz 以下の周波数帯には影響しない.な お,2.5 秒から 5 秒までのデータの振幅スペクトルは,ノ イズレベル評価のために示している.位相スペクトル (Fig. 1d) は,unwrap 処理をして連続的な位相が分かる ように表示している.両信号で π radian 程度ずれてお り,波形の極性と対応している.Hi-net の地震計の位相 特性は,固有周波数 (1 Hz) よりも低周波側で π radian に,高周波側で 0 に漸近し,固有周波数付近で周波数に 対する勾配が最も大きくなる.Fig. 1d には,地震計お よび最新の収録装置のデジタルフィルタの位相特性も重 ねて図示した.センサーチェック信号の位相は,地震計 の固有周波数に近い 3 Hz くらいまでは周波数に対して 急勾配になっており,主として地震計の位相特性を反映 している.さらに高周波数側で位相が比較的緩やかに下 がり続けているのは,主として収録装置のデジタルフィ ルタの位相特性を反映している.したがって,センサー チェック信号の位相値は,地震計の固有周波数である 1 Hz に近い低周波の帯域で大きく変化することになる. 地震計の検定コイルへ印加される直流電圧の生成を行 う DAC の起動・停止に際しては,メカニカルリレーの 動作の前後に十分な時間マージンが設けられており, DAC のサンプリング開始時および終了時の影響は無視 できるようになっている.また,メカニカルリレーの ON/OFF タイミングは,GPS レシーバの 1PPS によっ て直接与えられるため,収録装置のデルタ・シグマ型 ADC (Analog-to-Digital Converter) のサンプリング・ク ロックとは独立である[株式会社計測技研(私信)].そ れゆえ,センサーチェック信号のタイミング変化をモニ ターすれば,サンプリング・クロックの GPS 時刻からの ずれを検出できる可能性がある. センサーチェック信号をタイムマークとして用いる際 に問題になるのが,メカニカルリレーの動作安定性と地 震計の特性変化である.Hi-net のタイプ 3 収録装置のメ カニカルリレー (Panasonic ATQ209) の動作 (ON) およ び復帰 (OFF) 時間は,カタログには 3 ms 以内と記載さ れている.これは,GPS の 1PPS による起動指令からス イッチ動作までの時間が,指定の条件で使用していれ ば,この時間範囲に収まることを示している.また,同 Hi-net データによる走時変化計測の高精度化 99
Fig. 1. An example of the sensor check signal at Hi-net Yaotsu (N.YOTH) stacked for a month of October 2012. (a) Waveform of the sensor check signal. Vertical broken lines indicate boundaries of SC0 (0.0-2.5 s), SC5 (5.0-7.5 s) and noise (2.5-5.0 s). (b) Enlarged view of the waveform (a). (c) Amplitude spectra of SC0, SC5 and noise. (d) Phase spectra of SC0, SC5, and phase characteristic of the seismometer and data logger of the Hi-net.
じ型番のメカニカルリレーを用いている場合でも,観測 点間あるいは収録装置の更新の前後で比較する場合や, 同じ観測点でも成分間の比較には 3 ms 以内の誤差を考 慮する必要があることを意味している.一般に,走時変 化の検出では相対的な時間差が問題となるため,同一の 収録装置を使い続けている場合は,リレーの動作が安定 していれば動作・復帰における絶対的な遅延時間は問題 にならない.一方,地震計の位相特性が変化すると,セ ンサーチェック信号の遅延時間に見かけ上の変化が生じ るので,その点にも注意が必要である.既に述べたよう に地震計の固有周波数付近の周波数での変化が最も大き いと考えられる.以上のことを念頭に置いてセンサー チェック信号の解析を行った. §3. サンプリング・クロックの相対的遅延時間の推定 メカニカルリレーの動作が GPS 時刻に対して一定の 遅延時間を有したままで安定していると仮定し,セン サーチェック信号を用いてサンプリング・クロックの GPS 時刻に対する遅延時間の変化を評価する.仮定が 妥当かどうかは解析結果を用いて後に議論する. 3.1 クロススペクトルによる遅延時間の計算 センサーチェック信号は毎日午前 9 時に記録されるの で,1 日に 1 回,基準センサーチェック信号波形(以下, 基準波形)とのクロススペクトルから遅延時間を計算す る.この方法は,弾性波アクロス信号の伝達関数(ある いはグリーン関数)から走時変化を求める場合にも用い られている[例えば,気象研究所地震火山研究部 (2011)] 基準波形の fk(Hz) でのスペクトルを下記で表す. Xf=Xfexp iθf (1) j(日)におけるセンサーチェック信号波形の fk(Hz) で のスペクトルを Xf=Xfexp iθf (2) とすると,基準波形とのクロススペクトルの式は, S=XfXf =X fXfexp iθf−θf (3) で表される.周波数毎に求める基準波形からの遅延時間 dtf (s) は, dtf=θf−θf2πf (4) である.周波数毎に計算した遅延時間をクロススペクト ルの振幅(ノイズが周波数によらず一定とした場合の S/N 比.ノイズの例については,Fig. 1c 参照)で重みを 付けて平均して,センサーチェック信号の遅延時間 Δt を得る. Δt= ∑ X (f)X(f) dt(f) ∑X (f)X(f) (5) また,基準波形のノイズレベルを nとおくと,位相誤差 は nXf で計算でき,遅延時間の誤差 δtf は, δtf=nXf2πf (6) となる.同様に毎日の遅延時間誤差 δtf を計算して δtf との RMS (Root Mean Square) 値 δtf を求める と, δtf=
δtf+δtf2 (7) であり,これを式 (5) と同様にクロススペクトルの振幅 で重みを付けて計算した平均値を遅延時間の推定誤差と した. δt= ∑ X (f)X(f) δt(f) ∑X (f)X(f) (8) SC0 (0.0-2.5 s) と SC5 (5.0-7.5 s) は独立に扱い,以降の 計算は,それぞれ別個に行った.前述のように,セン サーチェック信号のクロススペクトルを計算するための 離散フーリエ変換の時間長は 2.5 秒間とし,時間窓は方 形窓とした.離散フーリエ変換後は,収録装置のデジタ ルフィルタの周波数特性を補正する.これは,収録装置 の更新前後でも,収録装置の周波数特性の影響を排除し てセンサーチェック信号のタイミングを比較できるよう にするためである. 続いて,実際の計算の手順を述べる.まず,最初の日 のセンサーチェック信号を基準波形として全期間につい て 1 日毎の遅延時間変化を求める.次に,ノイズレベル や遅延時間変化が小さい一ヶ月間を選んでセンサー チェック信号のスタッキングを行い,それを基準波形と して再度同様の計算を行う.遅延時間を周波数毎に計算 した後,式 (5) を用いて平均遅延時間を求める.地震計 の固有周波数付近は地震計の周波数特性が変化しやすい ことや高い周波数ではセンサーチェック信号の振幅が小 さく S/N 比が小さくなることを考慮し,また,メカニカ ルリレーの接点が閉じる場合 (ON:SC0) にはバウンス (接点の衝突振動)が発生するなど信号が乱れる可能性 も予測されるため,まずは,接点を開いた場合 (OFF: SC5) の 10-20 Hz のクロススペクトルについて計算した 結果を示す. 3.2 推定された遅延時間変化の特徴 本研究の解析に用いた Hi-net 観測点を Fig. 2 に示す. センサーチェック信号の入力がなかった観測点を黒い三 角で,センサーチェック信号の波形に明らかな異常が あった観測点をグレーの三角で示した.異常が見られた 2 点は,解析期間の途中からセンサーチェック信号波形 が大きく変化し,遅延時間の推定に大きな誤差が生じ た.本研究の解析には,明瞭なセンサーチェック信号が 記録されていた観測点のみを用いた.センサーチェック信号の遅延時間推定の例として, Hi-net 八百津 (N.YOTH) および Hi-net 鳳来 (N.HOUH) の結果を Fig. 3 および Fig. 4 に示す.1 日毎の遅延時間 推定値を黒点で,SC5 の直前の 2.5 秒間 (2.5-5.0 s) のノ イズレベルを SC5 に含まれるノイズレベルと同じとみ なして計算した誤差をグレーの縦線で示している.解析 期間は,2004 年 4 月 1 日から 2012 年 10 月 31 日までで あり,基準波形には,遅延時間の変化が共通して少な かった 2012 年 10 月の 31 日間のデータをスタッキング した波形を用いた.なお,解析期間中に収録装置の更新 が行われており,八百津 (N.YOTH) では,2007 年 12 月 12 日 ∼13 日 に タ イ プ 1 か ら タ イ プ 3 へ,鳳 来 (N. HOUH) では,2008 年 1 月 17 日∼18 日にタイプ 2 から タイプ 3 へ変更された.収録装置の更新によってメカニ カルリレーも変わるため,収録装置の更新の前後では遅 延時間を厳密に評価することはできないが,ここでは, 全期間共通の基準波形を用いて計算し,更新前後でどの 程度の違いが出るかを確認することにした. 遅延時間の推定値のばらつきは,推定誤差が大きいほ ど 大 き く な っ て い る.鳳 来 (N. HOUH) は 八 百 津 (N. YOTH) に比べていずれの成分でもばらつきや誤差が小 さくなっているが,解析した周波数帯域 (10-20 Hz) で, 鳳来は八百津に比べて,概してノイズレベルが低く,セ ンサーチェック信号の振幅が大きいことが主たる原因で ある (Table 1).鳳来の EW 成分 (Fig. 4c) は,2007 年に 誤差が大きい時期があるが,地震計の故障でノイズが大 きくなったためで,2007 年 9 月 8 日に地震計を改修した 後には元の状態に戻っている.なお,上下動成分は,ど ちらの観測点でも,全体として点のバラつきが大きく誤 差も大きくなっている.これは,10-20 Hz の帯域の振幅 で見ると,水平動成分に比べて上下動成分の地動ノイズ が大きいこと(特に八百津)や,上下動のセンサー チェック信号の振幅が水平動に比べて小さく,S/N 比が 小さくなっているためである. 遅延時間の推定値は,時々ステップ状に変化するが, 変化後は,ほぼ一定値になっているように見える.その Hi-net データによる走時変化計測の高精度化 101
Fig. 2. Map of Tokai region showing the location of the Hi-net stations analyzed in this study and the seismic ACROSS station (TOKI). Hi-net stations are denoted by triangles. A black triangle indicates the Hi-net station where the sensor check signal has not been recorded during the entire period of this study. Two gray triangles indicate the Hi-net stations where the sensor check signals were severely deformed in the middle of the analysis period of this study. Broken circles indicate epicentral distance from TOKI denoted by a star. An open square indicates Tajimi AMeDAS (Automated Meteorological Data Acquisition System) of Japan Meteorological Agency.
上に,推定誤差に応じたばらつきや年周変化が乗ってい るとみられる.そこで,ステップ状に変化した日時を推 定して遅延時間が一定と見なせる区間に分け,各区間毎 にデータ点のノイズレベル(分散)の逆数で重みを付け た最小二乗法を行って直線をフィッティングした.詳細 は後の議論で述べるが,ステップの時間(縦破線の位置) には,以下の日時を与えた.まず,収録装置の更新と地 震計の改修が終了した日時である.次に,データの欠測 および欠測の前後で DC オフセットが変化していること を判定基準として決定した ADC の再起動時間,つま り,サンプリング・クロックがリセットされた後のデー タ取得開始時刻である.この時刻から次の該当する欠測 が始まる時刻までを最小二乗法による直線フィッティン グの区間とした.Fig. 3 および Fig. 4 の点群の上に描か れている水平な白色の破線は,各区間毎にフィットした 直線である.推定された遅延時間がステップ関数状に変 化していることが理解できる. 同様の計算を本研究で対象とした全ての観測点につい て行い,得られたステップ関数を Fig. 5 に示す.Fig. 5 には,水平動の成分 (NS, EW) で得られたステップ関数 を描いている.上下動に関しては,全般的に推定誤差が 大きく,大きなドリフトを示す観測点もあったため図か らはずした.Fig. 5 の各観測点の 2 本の線の隙間や太 さ,つまり,2 つの成分の不一致は,それぞれの観測点, それぞれの期間での推定誤差の目安となる.なお,Fig. 5 は,遅延時間の符号を反転して考えれば,GPS 時刻に 対するサンプリング・クロック時刻の相対的な遅延時間 (クロック補正量)を表しているとみることができる. ステップ状の変化は,いずれの観測点においても認めら れる.また,タイプ 1 から 3 まで全ての収録装置で発生 しており,リリース直後のタイプ 3 では,特に頻度が高 くなっていることが分かる.
Fig. 3. Temporal variations in delay time of SC5 within a frequency band of 10 to 20 Hz, ob-tained by cross-spectral method at Hi-net Yaotsu (N.YOTH). Dots and vertical gray lines indicate the estimated delay times and the error bars, respectively. Vertical broken lines indicate the time when the ADC (Analog-to-Digital Converter) restarted and the stepwise change of the delay time is expected. White horizontal broken lines indicate the delay times fitted by the weighted least-squares method. An open diamond indicates the time when the data logger was renewed by the new one. Black inverted triangles indicate the other events with restarting of the ADC. (a) UD-component. (b) NS-component. (c) EW-component.
§4. 議 論 4.1 遅延時間のステップ状変化の特徴とその原因 推定されたセンサーチェック信号の遅延時間は,どの 観測点でも,3 成分同時に同符号で,ほぼ同じ時間幅の ステップ状変化をしている.動コイル型の地震計の周波 数特性が,いつも 3 成分同時に同じ大きさのステップ状 変化をするというのは考えにくい.収録装置の更新に 伴って,ステップ状の変化の回数やパターンが変わって いることからも,収録装置側に原因があるとみるべきで あろう.収録装置で,まず疑われるのが,センサー チェック信号を発生させているメカニカルリレーの動作 特性が変化することである.その場合,メカニカルリ レーは地震計の成分毎に独立なので,3 台のメカニカル リレーの動作特性が,いつも同時に同じ方向にほぼ同じ 時間幅ずれる必要がある.そして,設置環境が異なるど の観測点でも,また,電気回路が異なる全てのタイプの 収録装置に対しても同様の変化の仕方をする必要があ る.メカニカルリレーの機械的な特性が,このような変 化をするのは,地震計の場合と同様に考えにくいことで ある.メカニカルリレーの ON/OFF タイミングを制御 している GPS レシーバの 1PPS 出力が収録装置のサン プリング・クロックに対してずれているとするならば, 3 成分同時に同じように変化することが考えられる.こ の場合,GPS レシーバを基準にすれば,ずれたのはサン プリング・クロック側であるという結論になる. 4.2 ADC の再起動に伴うクロックのずれ 次に,サンプリング・クロックが,GPS 時刻に対して ステップ状にずれる原因を考える.収録装置がどのよう な状態の時にサンプリング・クロックがずれたのかを知 るために,まず,本研究で対象とした観測点の 2007 年 12 月から 2012 年 10 月までの期間のデータについて,10 秒以上欠測している日時をピックアップし,欠測前後で Hi-net データによる走時変化計測の高精度化 103
Fig. 4. Temporal variation in delay time of SC5 within a frequency band of 10 to 20 Hz, ob-tained by cross-spectral method at Hi-net Hourai (N.HOUH). Dots and vertical gray lines indicate the estimated delay times and the error bars, respectively. Vertical broken lines in-dicate the time when the ADC restarted and the stepwise change of the delay time is ex-pected. White horizontal broken lines indicate the delay times fitted by weighted least-squares method. An open diamond and an open inverted triangle indicate the time when the data logger was renewed by new one and the seismometer was repaired, respectively. Black inverted triangles indicate the other events with restarting of the ADC. (a) UD-component. (b) NS-component. (c) EW-component.
のデータの変化を調べた.その結果,センサーチェック 信号の遅延時間がステップ状に変化する前(前日のセン サーチェック信号までの 24 時間の内)には,必ず欠測が あり,ほとんどの場合欠測の前後でデータの DC オフ セットが変化していることが分かった (Fig. 6).これら の欠測の時間長は,通常は数分間以上であるが,時に 40 秒前後の場合もあった.該当する欠測 125 件のうち 93 件(約 74%)が,欠測前にあった DC オフセットが欠測 後にはキャンセル(ゼロにリセット)されるという変化 をしている (Fig. 6a, Fig. 6b).そのうち Fig. 6b は,長時 間の欠測の後に一旦キャンセルされた DC オフセットが 大きく変化していくような場合であり,DC オフセット がキャンセルされる場合 93 件中の 15 件が該当した.欠 測前の DC オフセットがほぼゼロの場合は,欠測後の DC オフセットもゼロに近くなるが,僅かでも欠測後の DC オフセットに変化が認められた場合 (Fig. 6c) が 15 件(全体の 12%)で,変化したかどうかの見分けがつか ない場合 (Fig. 6e) が 9 件(全体の約 7%)存在した.ま た,DC オフセットがキャンセルされるのではなく,欠 測前と大きく異なる値に変化する場合も 8 件(全体の約 6%)確認された (Fig. 6d).Fig. 3 および Fig. 4 に記した 黒三角と縦破線で示した位置は,このような欠測が終了 した時間を表している. 次に,このような欠測が生じるのはどんな場合である かを,デルタ・シグマ型 ADC の特徴から考察する. 種々のカタログや文献[例えば,松井 (2010)]によれば, 高分解能(例えば 24 bit)のデルタ・シグマ型 ADC に は,測定精度を向上させるために DC オフセットをキャ リブレーションする機能が備わっている.センサー チェック信号の遅延時間の変化に対応する欠測に伴う DC オフセットの変化は,ADC の再起動時にオフセッ ト・キャリブレーションが行われるためであると考える と全て説明することができる.Fig. 6a や Fig. 6b のよう に欠測の後に DC オフセットがキャンセルされるのは, ADC 再起動時の典型例を示していると考えられる.欠 測前の DC オフセットがほとんどゼロの場合は,欠測後 もキャリブレーションによってゼロに近い値となり,欠 測前後の DC オフセット差が小さくなる (Fig. 6c).一方 Fig. 6d のように,DC オフセット値が大きく変化し,明 らかにオフセット・キャリブレーションが失敗したと考 えられる例も見られる. なお,欠測には,伝送ミスやデータサーバーのトラブ ルなど ADC の再起動とは関係のないものも存在してい る.その場合は,Fig. 6f のように欠測前後で DC オフ セットの変化を伴わないため大部分は識別できるが,問 題になるのが,該当する欠測全体の 7% を占めていた欠 測前後の DC オフセットがほぼゼロで,変化の見分けが つかない場合である (Fig. 6e).この場合,再起動後のオ フセット・キャリブレーションが上手く行ったことを示 しているのか,それとも観測点からの伝送ミスなど別の 原因による欠測なのか判断できない.本研究の調査範囲 では,このような欠測は,センサーチェック信号の遅延 時間の変化前に,それぞれ一回しかなかったため,混乱 は生じなかった.しかし,そのような欠測が複数存在す る場合は ADC 再起動の時刻を限定することはできない ため,最初と最後の欠測の間の期間全体を欠測扱いと Table 1. Amplitudes of the sensor check signals and noises in the reference waveforms at
Hi-net Yaotsu (N. YOTH) and Hourai (N. HOUH). (a) Peak amplitudes of SC5 in time domain. (b) RMS (Root Mean Square) amplitudes of noise (2.5-5.0 s) in time domain. (c) Spectral RMS amplitudes of SC5 in frequency range 10-20 Hz. (d) Spectral RMS ampli-tudes of noise (2.5-5.0 s) in frequency range 10-20 Hz.
Hi-net データによる走時変化計測の高精度化 105
Fig. 5. The delay times of SC5 (10-20 Hz) of horizontal components, NS and EW, at the twenty Hi-net stations, (a) N.ASHH (Asahi), (b) N.NUKH (Nukata), (c) N.HOUH (Hourai), (d) N.HAZH (Hazu), (e) N. INSH (Inasa), (f) N. FKRH (Fukuroi), (g) N. YOTH (Yaotsu), (h) N. KSHH (Kushihara), (i) N.KGWH (Kakegawa), (j) N.TNRH (Tenryu), (k) N.MKBH (Mikkabi), (l) N. TOEH (Toei), (m) N.TT2H (Tatsuyama-E), (n) N.ASUH (Asuke), (o) N.STRH (Shitara), (p) N. TYEH (Toyone), (q) N.OKZH (Okazaki), (r) N.TDEH (Tsukude), (s) N.SSRH (Shinshiro) and (t) N.THNH (Toyohashi-N).
し,最後の欠測を遅延時間変化の時間とするのが良いで あろう. ADC の再起動時には,サンプリング・クロックがリ セットされ,センサーチェック信号の遅延時間のステッ プ状の変化は,その際に発生すると考えられる.デル タ・シグマ型 ADC では,オーバーサンプリングされた データをデジタル・ローパスフィルタとデシメーション (decimation,間引き処理)によって所定のサンプリング 周波数を得ている[例えば,相良 (1991)].Hi-net の収録 装置では,ADC の出力データ(タイプ 3 では 1 kHz)を, さらに多段のデジタル・ローパスフィルタを通してデシ メーションを行っており,最終的に 100 Hz のサンプリ ング周波数としている.以降で議論するクロックを, ADC の最初の段階のオーバーサンプリングに用いられ る高周波のクロック(以下,オーバーサンプリング・ク ロック)とデジタル・ローパスフィルタとデシメーショ ンに用いられる低周波のクロック(以下,サンプリン グ・クロック)に区別する.このとき,サンプリング・ クロックは,ADC から収録装置にいたるまでのデシ メーション操作の段階の数だけ(異なる周波数のもの が)存在するが,ここでは簡単のために全てを一括して, 最終段の 100 Hz をサンプリング・クロックとして代表 させることにする. オーバーサンプリング・クロックは,GPS の 1PPS を 用いた 1 秒間のカウント値により周波数が常時調整され ている[株式会社計測技研(私信)].fo (Hz) でオーバー サンプリングが行われるとすると,クロックパルスが 1 秒間で常に fo カウントとなるようにクロックの周波数 が調整される.この調整が上手く行っている状態を,本 論文では GPS と周波数同期していると呼ぶことにする. 常時 GPS と周波数同期している状態では,オーバーサ ンプリング・クロックをカウントすれば,1 秒間は fo カ ウント,1 日間はその 86400 倍として,サンプリング間 隔である 1/fo (s)(fo を 1 MHz 以上とすると 1 μs 以下) Fig. 6. Examples of missing data. Panels (a) to (e), show examples of missing data thought to be
caused by restarting of the ADC, preceded the stepwise change of the delay time of SC5. Panel (f) shows an example of missing data caused by the problem such as the trouble of data transmission system or computer server. (a) DC offset was canceled after the missing data. (b) DC offset was canceled and changed rapidly after the missing data for a longer period of time. (c) DC offset was slightly changed after the missing data in the case where DC offset of the previous data was almost zero. (d) DC offset was changed the different value departed from zero after the missing data. (e) DC offset was almost zero before and after the missing data. (f) DC offset before and after the missing data was non-zero value and same.
の精度で正確に時間(の長さ)を測ることができる.し かし,GPS に周波数同期しているだけでは,サンプリン グの時刻の正確さは保証されない.ADC 内で 1 kHz へ, 収録装置内で 100 Hz へとデシメーションされる際に, オーバーサンプリングされたデータのどの点を起点とし て間引かれるかが問題である.デシメーションに用いら れる全てのクロックが,GPS の 1PPS と常時正確にタイ ミングが合っていれば問題ないが,ADC や収録装置の 仕様でずれることがあるとすれば,ここに GPS 時刻と サンプリング・クロックの間に本研究で検出されたよう な時間差が発生する可能性がある. Fig. 3 や Fig. 4 のように,各観測点で 1 日毎に得られ るセンサーチェック信号の遅延時間は,ステップ状変化 した後は一定とみなせることから,通常の場合,サンプ リング・クロックは 1 日の長さを正確に刻んでいると考 えられる.つまり,少なくとも推定誤差の範囲内では, サンプリング・クロックは,GPS と周波数同期している と判断することができる.オーバーサンプリング・ク ロックが GPS レシーバと周波数同期していれば,時間 の長さの基準も正確であるから,再起動時にセンサー チェック信号の遅延時間がステップ状に変化するのは, ADC の内部でデシメーションされたデータあるいは収 録装置のデジタルフィルタでデシメーションされた後の データのタイミングが GPS 時刻とずれているのが原因 であり,それはデシメーションに用いられるクロックの タイミングが,GPS の 1PPS と正確に合わせられていな いためであると考えられる. ここまで,サンプリング・クロックを基準にしてセン サーチェック信号 SC5 (10-20 Hz) の遅延時間を推定し てきた.両者は,GPS レシーバからの 1PPS を基準とし て独自のタイミングで駆動されている.ADC の再起動 時以外は,SC5 (10-20 Hz) の遅延時間がいつもほぼ一定 値とみなせることから,サンプリング・クロックおよび メカニカルリレーの復帰 (OFF) タイミングが共に安定 しているという結論を得たことになる.逆に考えれば, 両者が安定しているからこそ,本研究でセンサーチェッ ク信号の遅延時間のステップ状の変化,つまり,サンプ リング・クロックの変化を認識することができたという ことである. センサーチェック信号の遅延時間のステップ状変化 は,タイプ 3 収録装置でみると,導入されてからしばら くは多発しているが,後の方ではあまり起こっていな い.これは,収録装置の更新後,新しい収録装置の初期 的な不具合やファームウェアの更新などにより,再起動 が頻繁に行われたためと解釈できる.タイプ 1 およびタ イプ 2 では,ステップ状変化は 2004 年に集中し,その後 は見られないが,これも,タイプ 3 と同様の説明ができ るかもしれない.つまり,本調査期間内ではタイプ 3 の ステップ状変化が非常に多く認められるが,タイプ 1 お よびタイプ 2 でも 2004 年 4 月 1 日以前の導入当初から 遡って調べれば,程度の差はあれ,頻繁に起こっていた 可能性は否定できない. 4.3 アクロスによる走時変化データとの比較 次に,センサーチェック信号の遅延時間変化から得ら れたサンプリング・クロックの補正量を,アクロス信号 の観測による走時変化のデータに適用し,その妥当性を 議論する.Fig. 7 は,2004 年 2 月 21 日から 2012 年 6 月 30 日までの土岐送信所 (TOKI) からの弾性波アクロス 信号を最も近い Hi-net 八百津(N.YOTH.TOKI から 11.3 km)で観測して得られた P 波および SH 波の走時変 化である (Fig. 2).2010 年 3 月 1 日から 2011 年 2 月 28 日までの 1 年間についてアクロス信号をスタックして得 られたグリーン関数を基準として,1 日毎に 1 週間ス タックしたグリーン関数とのクロススペクトルを計算す ることにより走時変化を計算している.2011 年 3 月 11 日の東北地方太平洋沖地震の際に P 波で約 1.4 ms,SH 波で約 2.0 ms の遅延が生じており,破線で示すように他 の地震時にも遅延が見られる.問題は,地震発生時以外 にも,顕著なステップ状の走時変化が多数見られること である. Hi-net 八百津 (N.YOTH) のサンプリング・クロック補 正値を Table 2 に示す.ADC 再起動の日時とそれ以降 の補正値という形で示しており,補正値は,水平動 2 成 分で得られた SC5 (10-20 Hz) の遅延時間の平均値の符 号を反転した値である.また,センサーチェック信号の 遅延時間を重みつき最小二乗法で直線フィッティングす る際の推定標準誤差(NS 成分の場合)と NS 成分と EW 成分のそれぞれで得られた遅延時間の差とを誤差の目安 として示している.フィッティングの標準誤差は 0.004 ∼0.015 ms,水平動 2 成分の遅延時間の差は,最大で 0.114 ms,タイプ 3 に限れば,0.072 ms であり,ほぼ 0.1 ms 以内の誤差でセンサーチェック信号の遅延時間が推 定されていることが分かる.サンプリング・クロック補 正をした結果が Fig. 8 である.不自然なステップ状の 変化は消え,年周的な変化と大地震時の遅延とが明瞭に 認識できるようになり,経年的な変化の議論も可能と なった.Hi-net 八百津観測点では,2007 年 12 月 12 日 ∼13 日に収録装置の更新が行われている.偶然にも,メ カニカルリレーの復帰 (OFF) 時間が両者でほぼ同じで あったとみられ,約 7 ms の遅延時間差はほとんど補正 されている.しかし年周変動のピークの繋がりを見る と,0.2 ms 程度の微妙なギャップが補正されずに残って Hi-net データによる走時変化計測の高精度化 107
Fig. 7. The temporal travel time variations of the P and SH waves detected by observation of the Toki seismic ACROSS signals without the sampling time correction at Hi-net Yaotsu (N.YOTH) from April 2004 to June 2012 [after Kunitomo (2012c)]. The data logger was replaced Type.1 with Type.3 at December 13, 2007. (a) P wave, (b) SH wave and (c) Atmospheric temperature (line chart) and daily rainfall amount (bar chart) observed at Tajimi AMeDAS. Earthquakes, Eq.1 [The 2004 off the Kii Peninsula Earthquake (September 5, 2004, M=7.1, M=7.4)], Eq.2 [The 2009 Suruga Bay Earthquake (August 11, 2009, M=6.5)] and Eq.3 [The 2011 off the Pacific Coast of Tohoku Earthquake (March 11, 2011, M=9.0)].
Fig. 8. The temporal travel time variations of the P and SH waves detected by observation of the Toki seismic ACROSS signals with the sampling time correction at Hi-net Yaotsu (N.YOTH) from April 2004 to June 2012 [after Kunitomo (2013)]. The data logger was replaced Type.1 with Type.3 at December 13, 2007. (a) P wave, (b) SH wave and (c) Atmospheric temperature (line chart) and daily rainfall amount (bar chart) observed at Tajimi AMeDAS. Earthquakes, Eq.1 [The 2004 off the Kii Peninsula Earthquake (September 5, 2004, M=7. 1, M=7. 4)], Eq. 2 [The 2009 Suruga Bay Earthquake (August 11, 2009, M=6. 5)] and Eq. 3 [The 2011 off the Pacific Coast of Tohoku Earthquake (March 11, 2011, M=9.0)].
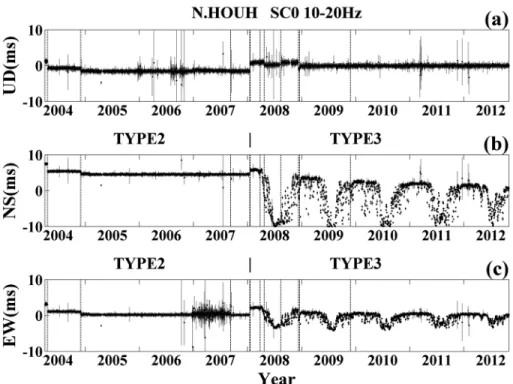
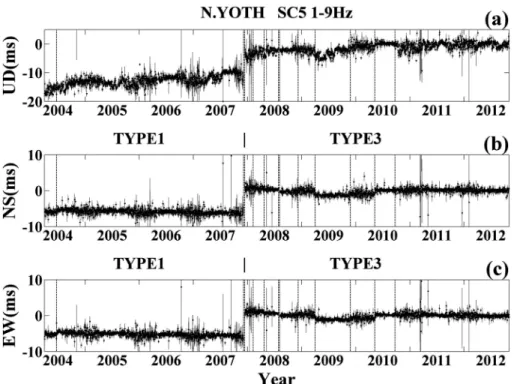
可能性がある.収録装置の更新に伴うギャップを補正す るためには,あらかじめ実機でメカニカルリレーの復帰 時間を測定しておく必要があるが,既に更新されてし まった後なので,同じ収録装置の期間で分けて議論する か,別の補正方法を工夫する必要がある. 4.4 メカニカルリレーと地震計の特性変化 次に,メカニカルリレーの動作 (ON) 時の問題と地震 計の位相特性の変化とみられる現象について議論する. Hi-net 鳳来 (N.HOUH) での SC0 の 10-20 Hz についての 遅延時間推定結果を Fig. 9 に,Hi-net 八百津 (N.YOTH) での SC5 の 1-9 Hz についての遅延時間推定結果を Fig. 10 に示す.
鳳来 (N.HOUH) の水平動 (Fig. 9b, Fig. 9c) では,収録 装置がタイプ 3 に更新された後から,SC0 の遅延時間に 大きな年周変動とドリフトが見られるようになった.こ の現象は,地震計の改修後(2007 年 9 月 8 日)からでは なく収録装置の更新後(2008 年 1 月 18 日)から始まっ ており,SC5 の同じ周波数帯域では見られないことか ら,地震計の問題ではなく,SC0 つまりメカニカルリ レーの動作 (ON) 時の問題と考えられる.同様の現象 は,程度の小さい場合も含めると大多数の観測点で,い ずれもタイプ 3 に更新された後に発生している.収録装 置は,温度変化の影響を避けるために地下のピットに置 かれているが,あまり深くないために気温の年周変化の 影響をある程度は受けると考えられる.それで,動作 (ON) 時の特性変化の大きい製品では,このような現象 が現れるのかもしれない.これが当初に想定したバウン スの影響かどうかは不明である.ただし,NS 成分の年 周変化は最大で 15 ms を超えており,5 年で 5 ms 程度早 くなるドリフトも,動作時間 3 ms 以内というメカニカ ルリレーのカタログスペックを満たしていない.この理 由は現時点で不明であり,収録装置の回路・動作環境や メカニカルリレーの不具合などを調査する必要があるだ ろう.このように,SC0 を用いた場合は,10-20 Hz の周 波数帯でもセンサーチェック信号の遅延時間が精度良く 推定できない場合が多い. 地震計の固有周波数に近い 1-9 Hz 帯では,SC5 を用 いた場合でも,調査期間全体に渡って経年的に遅延時間 が変化している場合がある (Fig. 10a).収録装置の変更 後も,同様の変化が継続していることから,メカニカル リレーの特性の変化ではなく,地震計の位相特性の経年 変化である可能性が高い.明瞭な年周変化が認められな いのは,地震計が約 100 m のボアホール底に設置されて いるため気温の年周変化の影響をほとんど受けないため であろう.なお,水平動の結果と比較しながら細かく見 て行くと,サンプリング・クロックが原因のステップ状 の変化との対応がつけやすいが,それ以外にも,複雑な 変化が含まれていることが分かる.この原因は良く分か Hi-net データによる走時変化計測の高精度化 109 Table 2. Clock correction values at Hi-net Yaotsu (N.YOTH).“Correction”is negative
num-ber of simple mean values of the delay time estimated by SC5 of horizontal components (NS and EW).“Stderr”is the estimated standard error of NS component.“Diff.”is the differ-ence between NS component and EW component.
らないが,他の観測点でも 1-9 Hz 帯での結果は,複雑な 変化をしている場合が多く見られる. 4.5 今後の課題と本研究の波及効果 Hi-net のサンプリング・クロックは,数 ms の範囲で GPS 時刻との時間差が変化する場合があるものの,変化 後はこの時間差が一定に保たれることが判明した.時間 差が変化するのは ADC の再起動の際であると考えられ るため,それに伴う欠測の時刻が分かれば,変化した日 時を正確に求めることができる.なお,この結論は,1 日毎のセンサーチェック信号に基づくものであり,1 日 より短い時間内のクロックの安定性については検証され ていない.オーバーサンプリング・クロックが GPS に 周波数同期していれば短時間の安定性も問題ないと考え ているが,検証には別の方法を使う必要があり,今後の 課題となる. この結論の波及効果を考察してみる.本研究の結果 は,2 点間(ないし多点間)の信号の到達時刻差の変化を 高精度に観測して走時変化や地震波速度変化を検出する 方法に有効であると考えられる.例えば,発震時刻と到 達時刻の差で走時を決定する手法や観測点間での到達時 間差や相互相関を用いて走時変化を推定する手法であ る.これらの方法では,装置間で基準とする時計と比較 する時計とのタイミングがずれると,そのまま観測され る走時の変化として現れることになる.アクロスは,協 定世界時(GPS 時刻)を基準として送信時刻と観測点へ の到達時刻の差から信号の走時を測定する手法であるた め,Fig. 7 のように観測点でのサンプリング・クロック のずれが地震とは関係のない時にも走時変化として検出 されたのである. 本研究で,Hi-net のサンプリング・クロックと GPS 時 刻と時間差が通常は一定であることが示されたので,コ サイスミックな走時変化のような因果関係がはっきりと した短期変動を検出する場合は,サンプリング・クロッ クを補正する必要はないと考えて良さそうである.もち ろん,解析期間内に ADC の再起動が行われていないこ とや GPS レシーバが衛星を正常に捉えていることが前 提である.解析する期間を長く取れば,サンプリング・ クロックのタイミングが変化する場面に遭遇する可能性 も高くなり,サンプリング・クロックが原因の見かけ上 の走時変化を地下の変化と誤認する場合も考えられる. 長期間の走時変化のトレンドを長時間のスタッキング データを用いて移動平均的に追跡するような場合には, Fig. 9. Temporal variations of the delay time of SC0 (10-20 Hz) thought to be due to changes in
the response characteristics of mechanical relays at Hi-net Hourai (N. HOUH). (a) UD-component. (b) NS-UD-component. (c) EW-UD-component. Delay times of NS and EW components show noticeable annual variations and secular changes, after renewal of the data logger.
サンプリング・クロックのステップ状変化が原因でも, 変化がならされて走時が経年変化をしているように見え ることがあるので注意が必要である.地下の状態に関す る長期・常時モニタリングを行う場合,変化の原因が装 置ではないということは常に検証されなければならな い.なお,サンプリング・クロックに短時間の変動があ る場合は,1 つの観測点だけで自己相関関数の変化を追 跡する手法にも影響すると考えられるが,本研究の守備 範囲ではないため,別途調査が必要であろう. 次に,本研究の問題点をまとめてみる.まず,本研究 の手法の適用には,センサーチェック信号のように GPS 時刻に同期した信号が入力されていることが必要であ る.Fig. 2 で地図にリストアップしたように,Hi-net で も,センサーチェック信号が入っていない観測点やセン サーチェック信号が異常な波形をしている観測点も存在 している.また,上下動成分でドリフトを示すなど必ず しもクロックの遅延時間を反映していない場合もある. 全ての成分にこのような問題がある場合は,その観測点 では,精度の高い補正はできない.また,ノイズレベル が高い観測点では,センサーチェック信号の S/N 比が 低くなるため補正値の推定精度は低くなる.既に述べた ように,メカニカルリレーの動作・復帰時間の絶対値が 不明なため,収録装置が更新された場合は,サンプリン グ・クロックのタイミングの精度の高い比較は行えな い. 本研究で示したのは,あくまでも既に取得済みのデー タを生かす方法であり,地震計測をさらに精密化するた めにも,収録装置のサンプリング・クロックの精度の改 良が強く望まれる.収録装置のサンプリング・クロック を GPS レシーバの 1PPS と完全に時刻同期させること が望ましいが,サンプリング・クロックと GPS の 1PPS との正確な時刻差が記録されていれば,その情報を用い た補正を後で行うことでデータの高精度活用が可能にな る.また,そのような機能がない装置でも,最低限 ADC の再起動時に GPS レシーバから生成したタイム マークを収録装置に直接入力する回路を付加して記録す る方法が考えられる.このような工夫を行うだけでも, 走時の微小変化の推定精度を格段に向上させることが可 能である. §5. 結 論 センサーチェック信号をクロススペクトル法により遅 Hi-net データによる走時変化計測の高精度化 111
Fig. 10. Temporal variations of the delay time of SC5 (1-9 Hz) thought to be due to changes in phase characteristics of the seismometer at Hi-net Yaotsu (N.YOTH). (a) UD-component. (b) NS-component. (c) EW-component. Delay time of UD-component shows secular change grow-ing progressively larger durgrow-ing the investigation period.
延時間解析することにより,Hi-net の収録装置のサンプ リング・クロックの精度と安定性についての評価を行っ た.収録装置のデルタ・シグマ型 ADC のオーバーサン プリング・クロックは GPS と周波数同期しており安定 している.しかし,何段階かのデシメーションを経て最 終的に出力されるデータの出力タイミングは,GPS 時刻 に対して ms オーダーの不確定性をもっており,ADC が再起動する際にデータのサンプリング時刻が GPS 時 刻に対してステップ状にずれるという問題が発生する. この問題は,タイプ 1 からタイプ 3 までの全ての収録装 置で見られた. センサーチェック信号のうち 5 秒から始まる波形の高 周波 (10-20 Hz) 部分は安定しており,多くの Hi-net 観 測点でサンプリング・クロックの補正に使用することが できる.この補正値を弾性波アクロス信号の観測により 得られた走時変化に適用することで,サンプリング・ク ロックが原因のステップ状の走時変化は解消され,ms 以下の年周変化と大地震に伴うステップ状の走時変化が より明瞭に認識できるようになった. 謝 辞 本研究には,防災科学技術研究所の Hi-net のデータを 使用させて頂きました.防災科学技術研究所には,Hi-net の群遅延やセンサーチェック信号に関する質問に答 えて頂きました.株式会社計測技研には,センサー チェック信号とメカニカルリレーおよび ADC に関する 情報を頂きました.独立行政法人海洋研究開発機構の荒 木英一郎博士,匿名の査読者および編集担当委員の海洋 研究開発機構の藤江剛博士のコメントは,本論文の改善 に大変役立ちました.記して感謝致します. 文 献 気象研究所地震火山研究部,2011,東海地震の予測精度 向上及び東南海・南海地震の発生準備過程の研究‐第 2 章 精密制御震源(アクロス)を用いた地殻活動モニ タリング,気象研究所技術報告,63,88-161. 近藤仁志,2010,時刻同期,杉本末雄・柴崎亮介(編) 「GPS ハンドブック」,朝倉書店,350-359. 國友孝洋,2012a,Hi-net で観測された 2011 年東北地方 太平洋沖地震による土岐アクロス信号の変化,日本地 球惑星科学連合 2012 年度大会,SCG74-P05. 國友孝洋,2012b,弾性波アクロスを用いた地殻の地震 波速度変化連続監視─土岐弾性波アクロス送信を例に して─,日本地震学会講演予稿集 2012 年度秋季大会, B11-04,p 46. 國友孝洋,2012c,Hi-net で観測された土岐からの弾性波 アクロス信号の走時変化,日本地震学会講演予稿集 2012 年度秋季大会,P1-14,p 151. 國友孝洋,2013,東海地域の Hi-net で観測された土岐か らの弾性波アクロス信号の走時変化(2004 年∼2012 年),日本地球惑星科学連合 2013 年度大会,SSS26-10. 相良岩男,1991,「AD/ DA 変換回路入門」,日刊工業新 聞社,258 pp. 松井邦彦,2010,「A-D コンバータ活用成功のかぎ 変 換のメカニズムと性能の引き出し方」,CQ 出版社, 295 pp.
Minato, S., T. Tsuji, S. Ohmi, and T. Matsuoka, 2012, Monitoring seismic velocity change caused by the 2011 Tohoku-oki earthquake using ambient noise records, Geophys. Res. Lett., 39, L09309, doi: 10. 1029/2012GL 051405.
西村太志,2012,相似地震解析にもとづく東北地方太平 洋沖地震 (M9) による地震波速度変化の検出,日本地 球惑星科学連合 2012 年度大会,SSS27-P11.
Obara, K., K. Kasahara, S. Hori, and Y. Okada, 2005, A densely distributed high-sensitivity seismograph net-work in Japan: Hi-net by National Research Institute for Earth Science and Disaster Prevention, Review of Scientific Instruments, 76, 021301-doi:10.1063/1.1854197. Ohmi, S., K. Hirahara, H. Wada, and K. Ito, 2008, Tem-poral variations of crustal structure in the source region of the 2007 Noto Hanto Earthquake, central Japan, with passive image interferometry, Earth Planets Space, 60, 1069-1074.
Okada, Y., K. Kasahara, S. Hori, K. Obara, S. Sekiguchi, H. Fujiwara, and A. Yamamoto, 2004, Recent progress of seismic observation networks in Japan ─Hi-net, F-net, K-NET and KiK-net─, Earth Planets Space, 56, xv-xviii. 汐見勝彦・小原一成・針生義勝・松村 稔,2009,防災 科研Hi-net の構築とその成果,地震 2,61 特集号, S1-S7. 上野友岳・齊藤竜彦・汐見勝彦・Enescu Bogdan,2012, 2011 年東北地方太平洋沖地震に関連した地下構造の 速度変化の検出,日本地球惑星科学連合 2012 年度大 会,SSS27-P10.





![Fig. 8. The temporal travel time variations of the P and SH waves detected by observation of the Toki seismic ACROSS signals with the sampling time correction at Hi-net Yaotsu (N.YOTH) from April 2004 to June 2012 [after Kunitomo (2013)]](https://thumb-ap.123doks.com/thumbv2/123deta/8479570.919576/12.774.184.591.579.868/temporal-variations-detected-observation-signals-sampling-correction-kunitomo.webp)