ߎߩᬺߪޔ┹ベߩഥ㊄ࠍฃߌߡታᣉߒߚ߽ߩߢߔޕ URL : http://ringring-keirin.jp/
ࠪࠬ࠹ࡓ㐿⊒
㧞㧝㧙 F 㧙㧟
ᣂ᳓ᛛⴚ㧔 ADS:Aqua-Drive-System 㧕 ࠍ↪ߚࡠࡏ࠹ࠖࠢࠬߩᣂၮゲᔕ↪ߦ
㑐ߔࠆࡈࠖࠫࡆ࠹ࠖࠬ࠲࠺ࠖ
ႎ ๔ ᦠ 㧙ⷐᣦ㧙
ᐔᚑ㧞㧞ᐕ㧟
⽷࿅ᴺੱ ᯏ᪾ࠪࠬ࠹ࡓᝄ⥝දળ ᆔ⸤వ ␠࿅ᴺੱ ᣣᧄࡈ࡞࠼ࡄࡢᎿᬺળ
序
わが国経済の安定成長への推進にあたり、機械情報産業をめぐる経済的、社 会的諸条件は急速な変化を見せており、社会生活における環境、都市、防災、
住宅、福祉、教育等、直面する問題の解決を図るためには技術開発力の強化に 加えて、多様化、高度化する社会的ニーズに適応する機械情報システムの研究 開発が必要であります。
このような社会情勢の変化に対応するため、財団法人機械システム振興協会 では、財団法人JKAから機械工業振興資金の交付を受けて、システム技術 開発調査研究事業、システム開発事業、新機械システム普及促進事業を実施し ております。
このうち、システム技術開発調査研究事業及びシステム開発事業については、
当協会に総合システム調査開発委員会(委員長:東京大学名誉教授 藤正 巖氏)
を設置し、同委員会のご指導のもとに推進しております。
本「新・水圧技術(ADS:Aqua-Drive-System)を用いた ロボティクスの新基軸応用に関するフィージビリティスタディ」は、上記事業 の一環として、当協会が社団法人日本フルードパワー工業会に委託し、実施し た成果をまとめたもので、関係諸分野の皆様方のお役に立てれば幸いでありま す。
平成22年3月
財団法人 機械システム振興協会
はじめに
この報告書は、財団法人 機械システム振興協会の委託による「新・水圧技術(ADS:
Aqua-Drive-System)を 用 いた ロ ボ テ ィク ス の 新 基軸 応 用 に 関す る フ ィ ージ ビ リ テ ィス タ ディ」の成果報告である。
平成 20 年度の調査研究において、火力発電所では抽気蒸気を近隣の工業団地に配給し て、一層のエネルギー有効利用を実現していることが判明した。蒸気量の制御には、電動 機駆動の油圧ポンプを用いた、油圧制御の一自由度ロボティクス系が採用されている。
この油圧制御系を ADS 制御系とすれば環境調和に優れたシステムを構築でき、蒸気タ ービンで水圧ポンプを駆動する ADS 制御系を採用すれば、環境調和性と省エネルギーと に優れたシステムを構築できよう。先進的な取り組みといえる。その際、ADSロボティク ス装置の信頼性とコストが課題となることに鑑み、本年度は、次の基礎的な調査研究を実 施した。
(1)ADS ロボティクスモデルとして、基本的な駆動・制御部となる一自由度系の概念設
計を行い、蓄積してきた ADS 機器のデータをもとに装置を製作した。直線系試験装 置と回転系試験装置である。これらの装置について予備的な課題抽出の実験を行い、
制御パラメータや負荷条件等の影響を調べた。
(2)ADS ロボティクス採用時のコスト試算を、東京電力㈱川崎発電所等の規模について
行い、現状の油圧装置と比較した。
(3)今年度までの調査研究の成果のまとめと、今後の課題及び展開を示した。
フルードパワーの新たな挑戦を認識する参考となることを願い、この報告書を高覧に供 する次第である。
最後になりますが、経済産業省並びに社団法人機械システム振興協会はじめ関係各位の ご尽力に謝意を表します。
平成22年3月
社団法人 日本フルードパワー工業会
目 次 序
はじめに
1.F/Sの目的... 1
2.F/Sの実施体制... 2
第1章 本システムに必要な機能の整理と検討(機能、性能、全体の構成と ADS 機器な ど)... 5
1.1 システムの機能及び性能 ... 5
1.2 ADS機器の性能確認... 9
第2章 一自由度システム試作モデルの設計・製作... 16
2.1 水圧ユニット... 16
2.2 直線駆動系試験装置 ... 19
2.3 回転駆動系試験装置 ... 21
第3章 アクチュエータ部モデル装置の機能検証と課題抽出... 23
3.1 一自由度直線駆動系 ... 23
3.1.1 補償器概論... 24
3.1.2 実験結果... 25
3.1.3 実験結果の比較及び考察... 31
3.1.4 改善すべき問題 ... 34
3.1.5 結論と今後の課題... 34
3.2 一自由度回転駆動系 ... 34
3.2.1 ステップ応答実験... 35
3.2.2 追従制御実験... 40
3.2.3 まとめ... 42
第4章 ADSロボティクス採用時のコスト試算... 43
4.1 コスト算出の要因... 43
4.2 油圧技術と ADSのコスト比較... 44
第5章 文献・資料調査―欧州における実態調査―... 46
5.1 調査の概要... 46
5.2 調査結果... 47
5.2.1 タンペレ大学/フィンランド ... 47
5.2.2 WHC社/イギリス... 50
5.2.3 メルセデスベンツ社ラシュタット工場/ドイツ... 51
第6章 F/Sの成果のまとめと今後の課題及び展開... 54
1.F/Sの目的
平成 20年度の調査研究において、火力発電所では抽気蒸気を近隣の工業団地に配給し て、多目的有効利用する仕組みを構築して実用化されていることが判明した。また、発電 量を制御するための蒸気量の制御に油圧駆動方式が採用され、その方式は油圧ポンプを電 動機により駆動し、圧油は油圧サーボ弁へ供給され蒸気弁のシリンダを駆動する一自由度 ロボティクス系を構成していることも判明した。しかしながら現行の油圧駆動方式の問題 点として防油堤や防火扉等作動油の保管管理に消防法による厳しい指導規制がかかる等煩 わしさのあることがわかった。このため多目的に有効利用されている蒸気により制御がで
きる ADS(新・水圧技術:ADS= Aqua Drive System)の導入が極めて有効な分野である
ことが明らかとなった。ADSが環境、省エネ、省資源等からみて油圧に比べ有利な点が多々 あるのは明白である。
ここで ADS を応用する場合は、最終的には一次側エネルギーサイトからの蒸気を蒸気 タービンへ導き、タービンで水圧ポンプを駆動するシステムを構築し、火力発電所におけ る蒸気量制御弁の駆動制御の実用性を明らかにするもので、当面は、制御に必要な諸条件 のもとに、まず実験室規模で ADS の動作の基本である一自由度等のシステムについて機 能検証を行うことを目的とする。
なお、火力発電所等への導入には、既存の油圧システムに換えて ADS を導入するにあ たりユーザーサイドとしては、装置の信頼性とコストが最大の懸念事項となる。したがっ て、信頼性、安全性及び耐久性等の検証が必要である。そのために、次の段階では、当 F/S によって得られた技術を例えば、KYB(株)/岐阜北工場等にある自家発電装置等に適用 し、実用化のための検証を行うことを考えている。なお、コスト面についても、当 F/Sの 中で調査することとする。
ここで提案する「新・水圧技術:ADS(Aqua-Drive-System)」は作動流体に「清水」
を応用する機械・装置の駆動・制御技術である。それ故、電動のような漏電や防水・防滴 の適用規格外にあり、空気圧のような低剛性による制御上の課題やオイルミストなどの油 成分は存在せず、油圧技術と同じ液圧技術であるが、油圧の小型、高密度出力、高応答特 性の特性を持ちながらも完全オイルフリーなる特長を持っている。したがって、当 F/Sで 得られた技術は、発電所等での余剰蒸気の有効的蒸気の活用によるタービン駆動のほか電 動機駆動によるが、安全・衛生の環境面が要求される食品機械、半導体製造等々の一般産 業分野への適用も可能である。
ADSロボティクスモデルの構築
発電設備関連で重要な機能である蒸気量調整系や駆動系の基本技術の操作性や対環境 性・省エネルギー性の視点に立って構築した ADSのロボティクスの性能を検証する。即 応性、制御性が特に重要である。高温場、防爆域、水中や放射性雰囲気での環境下で確実 な自動的動作が要求される。現状技術と安全性の面から現技術の調査結果を踏まえて、
ADSの適用によるさらなる性能・動作性の確保の可能性について高温多湿場、水中でも安 全に操作が行える完全オイルフリー一自由度モデル装置を試作して検証する。したがって、
水中動作であっても当然のことながら電動のような防水・防滴対策の必要はなくなる。
2.F/Sの実施体制
(財)機械システム振興協会内に総合システム調査開発委員会が設置され、また(社)日 本フルードパワー工業会内に学識経験者を中心として、水圧機器、システム製造者を中心 に委員会を設置し、実施計画の詳細立案と審議を行い推進した。
委託
業務内容と業務分担
①必要機能の整理及びモデルのコンセプトの検討と決定 --- 委員会全体
②機器の性能確認 --- 沼津工業高等専門学校*
③コンセプトに基づくモデルの設計、製作 --- KYB(株)
④ADS技術導入のシステム、コントローラの設計、製作---芝浦工業大学*、KYB(株)
⑤数式モデルの検討 --- 東京工業大学*、上智大学*
⑥シミュレーションによる装置設計と検証 --- KYB(株)
⑦要素試験と装置全体の機能の検証と課題抽出 --- 委員全体
⑧ADSロボティクス採用時のコスト試算 --- 委員全体
* 委員会の要請にしたがい、必要に応じて大学にてシミュレーション、検証等を行う。
再委託
(財)機械システム振興協会 総合システム調査開発委員会
再委託先:KYB(株)
主な委託内容:
①コンセプトに基づくモデルの設計、製作
②ADS技術導入のシステム、コントローラの設計、製作
③シミュレーションによる装置設計と検証
( 社 ) 日 本 フ ル ー ド パ ワ ー 工 業 会 「新・水圧技術(ADS:Aqua-Drive-System)
を用いたロボティクスの新基軸応用に関する フィージビリティスタディ」委員会
総 合 シ ス テ ム 調 査 開 発 委 員 会 委 員 名 簿
( 順 不 同 ・ 敬 称 略 )
委 員 長 東 京 大 学 藤 正 巖 名 誉 教 授
委 員 埼 玉 大 学 太 田 公 廣 総 合 研 究 機 構
教 授
委 員 独 立 行 政 法 人 産 業 技 術 総 合 研 究 所 金 丸 正 剛 エ レ ク ト ロ ニ ク ス 研 究 部 門
研 究 部 門 長
委 員 独 立 行 政 法 人 産 業 技 術 総 合 研 究 所 志 村 洋 文 デ ジ タ ル も の づ く り 研 究 セ ン タ ー
招 聘 研 究 員
委 員 早 稲 田 大 学 中 島 一 郎 研 究 戦 略 セ ン タ ー
教 授
委 員 東 京 工 業 大 学 大 学 院 廣 田 薫 総 合 理 工 学 研 究 科
教 授
委 員 東 京 大 学 大 学 院 藤 岡 健 彦 工 学 系 研 究 科
准 教 授
「新・水圧技術(ADS:Aqua-Drive-System)を用いたロボティクスの新基軸応用に関する フィージビリティスタディ」委員会 委 員 構 成
氏 名 会 社 部 署・役 職 山口 惇 横浜国立大学 名誉教授・工学博士
北川 能 東京工業大学 大学院・教授・工学博士
池尾 茂 上智大学 理工学部機能創造理工学科・地球環境学研究科 教授・工学博士
大島 茂 沼津工業高等専門学校 制御情報工学科・副校長・工学博士 伊藤 和寿 芝浦工業大学 システム理工学部機械制御システム学科
准教授・工学博士
山下 良介 SMC(株) 開発第 8 部・係長
宮川 新平 KYB(株) 技術・生産本部基盤技術研究所
水圧システムグループ・グループ長・工学博士 小西 康夫 (株)カワサキプレシジョンマシナリ 機器第一技術部・参事
吉村 知久☆ (株)カワサキプレシジョンマシナリ 技術総括部・システム技術部・参事 大久保俊克 (株)阪上製作所 技術本部・設計第二部・部長
斉藤 理人 日本アキュムレータ(株) 技術部・部長
井口 務 廣瀬バルブ工業(株) 技術管理部・技術・開発課・マネージャー 井上 守 (株)堀内機械 技術部・部長
村上 康裕 (株)村上製作所 会長
吉田 太志★ KYB(株) 技術・生産本部基盤技術研究所 水圧システムグループ
事務局 三浦 吉成
(社)日本フルードパワー
工業会 第一技術部・部長
☆ 2009.11 小西委員より交代
★オブザーバー
第1章 本システムに必要な機能の整理と検討
(機能、性能、全体の構成と ADS機器など)
1.1 システムの機能及び性能
システム中に存在する余剰なタービン蒸気、抽気、復水等のもつエネルギーを有効利用 して得られたエネルギーは、タービンガバナ回転数制御用シリンダの駆動、あるいは民生 用蒸気供給網を介しての一般産業用アクチュエータ(直線運動及び回転運動)の駆動に有 効利用できる。
例えば、最新の 1500℃級コンバインドサイクル発電所では、
高圧蒸気(13MPa, 560℃)
高温再熱蒸気(3MPa、570℃)
低圧蒸気(0.4MPa、270℃)
が用いられており、高温再熱蒸気の一部を地域への熱供給に使用し、コージェネレーショ ンが行われている。また、多くの中小規模の工場やビルでは小型ボイラで 10 気圧未満の 低圧蒸気を製造し、減圧してから製造工程や空調に使用しているが、従来減圧時に捨てて いたエネルギーを利用して、蒸気タービンを駆動し、発電機や圧縮機を駆動する技術が開 発されている。図 1.1.1 に小型蒸気発電機の性能例を示す。これらのことから、発電プラ ント内の蒸気や工場やビルで使われている蒸気を動力源として、蒸気タービンを介して水 圧ポンプを駆動し、ADS 用の水圧エネルギーを得ることは十分可能であると考えられる。
これについては次年度以降実証試験を行っていく予定である。
上段:発電出力(kW) 下段:蒸気流量(ton/h)
図1.1.1 小型蒸気発電機の性能
(出典:神戸製鋼パンフレット、スクリュ式小型蒸気発電機)
本F/Sでは、余剰なタービン蒸気、抽気、復水等のエネルギーを有効に利用して得られ た水圧パワーソースのエネルギーを、例えばタービンガバナ回転数制御用シリンダの駆動、
あるいは民生用蒸気供給網により一般産業用アクチュエータ(直線運動及び回転運動)の 駆動に有効利用することを想定し、タービンガバナ回転数制御用シリンダの駆動系及び一 般産業用アクチュエータの駆動制御について一自由度システム試作モデルを用いた実験に より検討を行った。
タ ー ビ ン ガ バ ナ 回 転 数 制 御 用 シ リ ン ダ の 駆 動 系 制 御 シ ス テ ム 中 に は 多 く の 未 知 パ ラ メ ータ及びパラメータ変動、あるいはタービンへの外乱等が存在するため、それらの影響を 適切な制御系設計(ロバスト制御等=制御対象の実際の特性が、制御系設計の際想定した モデルと多少異なっても制御性を余り損なわない制御)により抑制することが重要である。
そのため、図 1.1.2に示す概念図に基づく直線形試験装置を作成し、検討を行った。
また、タービンガバナ回転数制御用シリンダに求められる詳細な制御仕様はその性質上 一般的に明らかにはされていないが、ガバナサイズあるいは現行の油圧サーボ系の性能を 基にある程度推察されることは昨年度の報告書でも述べたとおりである。本報告書では、
シリンダ制御系には以下の仕様を設けている。更に、ある程度信憑性のある運転データ等 に基づき、シリンダ制御系に与える負荷あるいは外乱の動特性を把握しておく必要もある。
・位置決め制度 0.1mm ・整定時間 4s
・オーバーシュートなきこと(+0.1mm以下)
これらの仕様の妥当性を確認するために、火力発電プラント全体の出力制御に関する文 献調査(参考文献[1]~[6])を行った。火力発電プラントにおいては、電力需要の変動に応じ て発電機出力を変化させるが、その際、周波数を一定に保つように制御することが強く要 求されている。プラントはボイラ、蒸気タービン、発電機、復水器、ボイラ給水ポンプな どで構成されており、制御にあたっては、ボイラへの給水制御、供給燃料の制御、蒸気タ ービン開度制御、蒸気加減弁の開度制御などが行われており、個々の構成要素の物理モデ ルから全体の動特性を解析することは極めて難しく、平常時運用データから特性を推定す る方法(参考文献[3])などが開発されている。図1.1.4は、発電出力を変更するときの永 藤らの開発したモデル(参考文献[5])の応答と実機応答を比較したものである。図中、上
から(1)出力増減指令信号、(2)周波数偏差、(3)発電機出力、(4)モデルと実機出力
の誤差を示している。図の横軸は時刻であり、11 時から 14 時 30 分までである。この図
タービン 目 標 回 転 数
回 転 数 誤 差
制 御 入 力
シリンダ変 位
(ガバナ変 位)
タービン 回 転 数
+
‐
コント ローラ
水 圧 シリンダ システム
タービンガバナ システム
計算機の中で実現 実機で構成
図1.1.2 水圧直線駆動系実験システム概念図
から、電力需要の変動に伴う、発電機出力の調整はゆっくりと行われていることがわかる。
蒸気加減弁の応答速度については全閉状態から全開するのに数十秒かかると記述されてい る(参考文献[5])。
一方、何らかの事故があり、送電不能になった際には、ただちにプラントを停止させて いた。しかし、送電可能となってから新たにプラントを起動するのでは効果的な系統運用 ができないという理由から、プラントを停止せず、出力を落として所内単独運転に切換え るようになってきている(参考文献[2])。図 1.1.3は負荷遮断後の所内単独運転への切換の 状況を示している。図中の主給水流量や全燃料流量の応答から上述の整定時間が妥当であ ると推定される。
一方、一般産業用アクチュエータの駆動制御について、図 1.1.5 に示す概念図に基づく 一自由度回転運動システム試験装置を作成し、検討を行った。このシステムでは、水圧モ ータの内部漏れ、摩擦が回転運動の制御に大きな影響を与える。それらの影響を低減する ための適切な制御系設計について検討した。また、産業用への実用化のため、回転運動制 御の際に発生する圧力サージの影響についても調べた。
図 1.1.3 負荷遮断後の所内単独運転への切換
(出典:参考文献[2])
図1.1.4 発電出力の変更時の応答 (出典:参考文献[5])
図1.1.5 一自由度回転運動システムの制御概念図
参考文献
[1] 赤尾武彦:変圧運転を採用した中間負荷火力発電プラント、電気学会雑誌、98-2
(1978)、105/112
[2] 佐藤、柴田:電力系統より期待される火力プラントの制御技術、電気学会雑誌、98-2
(1978)、113/120
[3] 浜場、横山、加藤、高林:平常時運用データを用いた系統定数推定手法、電気学会 論文集 B編、111-6(1993)、635/643
[4] 豊田、和田:非線形システム制御系設計のための同定 ―火力発電用ボイラへの適 用例―、電気学会論文集 C編、120-6(2000)、775/783
[5] 永藤他8名:火力機の負荷・周波数応答シミュレーションモデルと周波数変動に対 する応答特性評価、電気学会論文集 B編、125-9(2005)、871/878
[6] 豊田、尾崎、中野、Haggan-Ozaki:コンバインドサイクル発電所におけるNOx低
減 用 S C R 制 御 シ ス テ ム へ の 非 線 形 モ デ ル ベ ー ス 予 測 制 御 の 適 用 、 計 測 と 制 御 、 45-10(2006)、881/884
1.2 ADS機器の性能確認
本F/Sにおいて製作する直線駆動系実験システム及び一自由度回転運動システム試験装 置の構築に必要な主な ADS 機器について仕様検討を行い、選定した機器について基本性 能を実測し、本 F/Sにおいて必要とする機能を実現できることを確認した。以下、主な機 器についての仕様と基本性能の試験結果等を示す。
(1) リリーフ弁(圧力調整弁)
リリーフ弁は、ポンプからの吐出し圧力が設定圧力以上に上昇しないよう調整する安全 弁の働きをする圧力調整弁である。圧力設定用の調整ねじを回転して弁体を押すばねのた わみ量を変えることで設置圧力を調整することができる。本リリーフ弁は、直動型で比較 的シンプルな構造のものである。「水」という低粘性流体で使用するため、弁体の振動発生 を抑えるためのダンパー機能は、圧力ポート側にダンパー室構造を設けること、タンクポ ート側で弁体摺動部に粘弾性素材を挿入することで得ており、両者の複合効果により安定 した制御特性を実現している。
図 1.2.1に本リリーフ弁の主な仕様と圧力-流量特性を示す。本リリーフ弁の圧力調整範
囲は 0~14 MPa で、最大流量は 40 L/min である。いずれの設定圧力においても、圧力 オーバーライド(流量増大に伴う圧力上昇量)は、最大流量で 1 MPa 前後である。
図1.2.1 リリーフ弁の主な仕様と圧力-流量特性線図(水道水、35℃)
(2) 2-2切換弁
2-2切換弁は流体の流れる流路を開閉する機能をもつ電磁操作弁である。重要な特性 として、閉のときには漏れがなく、開のときにはできるだけ圧力損失が小さいことが要求 される。ノーマルクローズ形で電磁ソレノイドに通電しない状態ではばね力により閉じて おり、通電時に開となる。シート弁構造を採用することで水のような低粘性流体でも閉時 に漏れが生じない構造となっている。
図 1.2.2に本切換弁の主な仕様と圧力差-流量特性を示す。定格の最大流量 30 L/min を
流している状態で圧力損失は 0.28 MPa 程度である。漏れ検査は14 MPa の圧力差で実行 し漏れが生じないことを確認した。
仕 様
メーカ :廣瀬バルブ工業㈱
型式 :WRV-T04-14-11 適応流体 :水道水
流体の温度範囲 :5℃~65℃
圧力調整範囲 :0~14 MPa
仕 様
メーカ :廣瀬バルブ工業㈱
型式 :WSO-G03-A10C-11 最大流量 :30 L/min
最高使用圧力 :14 MPa 耐圧試験圧力 :21 MPa 流体の温度範囲 :5℃~65℃
圧力損失 :0.3 MPa以下
(流量 30 L/min時)
流れ方向 :A -> B, B -> A 両方向 質 量 :5.5 kg
図1.2.2 2-2切換弁の主な仕様と圧力差-流量特性(水道水、35℃)
(3)アキュムレータ
アキュムレータは、ポンプ吐出しラインの圧力変動を吸収して圧力の平滑化を図る目的 や、一時的に流体エネルギーを蓄積し必要時に放出してポンプ吐出し流量を補う目的等の ために使用する機器である。したがって用途に適した容積のものを選定することが重要と なる。構造は油圧システムに広く使用されているものと同じブラダ型である。水に使用す るために本体、側板、給排水弁等の材質は全てステンレス鋼(SUS304)で製作した。容 積は、エネルギー蓄積用アキュムレータ容積の計算手順に基づいて算出し 5.0 L と決定し た。主な仕様を以下に示す。
(4)水圧シリンダ
水圧シリンダは、高圧の流体エネルギーを直線運動の力学的エネルギーに変換するため の機器である。円筒形のシリンダチューブの中にロッドのついたピストンが挿入され、ピ ス ト ン の 片 面 に 高 圧 水 を 送 り 込 む こ と で ピ ス ト ン が 押 さ れ ピ ス ト ン と ロ ッ ド が 直 線 運 動 する。シリンダ内面とピストン外周及びロッド外周との間には微小な隙間を設けているが、
そこからの水の漏れを防ぐためにピストンシール及びロッドシールが取付けられている。
ピストンシールはシリンダ内面に接触して摺動し、ロッドシールはロッド外周面と摺動す る。したがってシリンダの性能にシールの特性(摩擦・磨耗)は大きな影響を与える。
本システムの制御用水圧シリンダ及び負荷用水圧シリンダは共に同一の仕様である。水 に使用するため、シリンダチューブ、ピストン、ピストンロッド等主要部分は全てステン レス鋼(SUS304)で製作した。ピストンシールとロッドシールは共に、超高分子量ポリ エチレン樹脂(UHMWPE)製シールリングと合成ゴム製 Oリングを組み合わせた、摩擦 抵抗が小さく、低圧、低速でもスティックスリップを起こさないシールを採用している。
シールリングは弾性が乏しいため、シールの装着溝は一体溝でなく分割溝で構成している。
主な仕様を以下に示す。
仕 様
メーカ :㈱村上製作所(シリンダ)、㈱阪上製作所(シール)
型式 :Y2-50337-0000 寸法 :φ50×φ28×250 mm 適応流体 :水道水 (材質 SUS304)
定格圧力 :14 MPa
伸長時推力 :13.5kN(7MPa時)、26.9 kN (14 MPa時)*
仕 様
メーカ :日本アキュムレータ㈱
型 式 :N19.9-LL5-PDL
適応流体 :水道水(本体、側板、給排水弁材質はSUS304)
アキュムレータの容積:5.0 L 最高使用圧力 :19.9 MPa 耐圧試験圧力 :29.9 MPa 適用温度 :- 10~70℃
継手サイズ :Rc 3/4
収縮時推力 : 9.3kN(7MPa時)、18.5 kN (14 MPa時)
(5)水圧サーボ弁
水圧サーボ弁は、水圧シリンダや水圧モータ等のアクチュエータを駆動させる制御弁で ある。本制御弁は、ノズルフラッパ型のサーボ弁で、バルブ制御用のスプールは静圧軸受 けにてスリーブ内に非接触で変位することを特徴とし、これによりスリーブとスプールで の摩擦、磨耗が発生しないため、「水」という低粘性流体でも高精度な制御性かつ良好な耐 久性を実現可能としている。
図1.2.3、図1.2.4に水圧サーボ弁の静特性として流量特性と圧力特性、図1.2.5、図1.2.6
に動特性として周波数応答特性とステップ入力応答特性の特性図を示す。図 1.2.3 の流量 特性から、入力電圧に対して線形かつヒステリシスのほとんどない流量特性が得られてい ることがわかる。また、図 1.2.4 の圧力特性においても負荷圧力差は、中立点近傍で線形 かつ全体的にヒステリシスのほとんどない特性が得られている。このような線形かつヒス テリシスのない流量及び圧力特性を実現できることは、液圧システムの制御設計において はとても重要なことである。
図 1.2.5 の周波数応答特性において、カットオフ周波数(振幅比-3dB)は、25%入力
時で約50Hz、100%入力時で約15Hz、また、位相遅れ(-90°)は、25%入力時で約45Hz、
100%入力時で約35Hzとなっている。図 1.2.6のステップ入力応答特性において、過渡特
性の指標として立上がり時間 Tr(10%~90%範囲)は、入力電圧 100%時で約 10msec であ り、波形からもわかるように 5~10%程度のオーバーシュートがあるが振動現象は発生せ ず、安定した特性が得られている。
本水圧サーボ弁の主な仕様は以下に示すようであり、水圧シリンダや水圧モータ等のア クチュエータのシステム制御を行うために必要な基本性能を有している。
図1.2.3 水圧サーボ弁の流量特性
-25 -20 -15 -10 -5 0 5 10 15 20 25
-10 -8 -6 -4 -2 0 2 4 6 8 10
Input [V] 供給圧7MPa
流量Q [L/min]
仕 様
メーカ :KYB㈱
型式 :WSV-20 適応流体 :水道水
(材質 SUS304)
定格圧力 :7MPa、14 MPa 定格流量 :20L/min
供給圧7MPa -10
-8 -6 -4 -2 0 2 4 6 8 10
-10 -8 -6 -4 -2 0 2 4 6 8 10
Input [V]
負荷圧力差ΔP [Mpa]
図1.2.4 水圧サーボ弁の圧力特性
図 1.2.6 水圧サーボ弁のステップ入力応答特性 0
0.2 0.4 0.6 0.8 1 1.2
0 0.01 0.02 0.03 0.04 0.05 時間[sec] 7MPa A-BポートOpen
スプール変位 [mm]
100%入力電圧
75%
50%
25%
7MPa 水温30℃
-30 -25 -20 -15 -10 -5 0 5
1 10 100
周波数[Hz]
振幅比[dB]
-270 -225 -180 -135 -90 -45 0 45
位相[°]
±25%入力電圧
±25%入力電圧
±40%
±100%
±40%
±100%
図1.2.5 水圧サーボ弁の周波数応答特性
(6)水圧ポンプ
水圧ポンプは、高圧の流体エネルギーを発生させるための機器である。本ポンプは、ア キシャルピストン型で、定格圧力 14MPa、基本吐出流量15cc/revで回転数1500rpmの時
に約 22.5L/min(理論流量)の流量を吐出させることができ、そのときの出力は約 5kWで
あ る 。 水 圧 ポ ン プ 内 部 の 摺 動 部 位 は 、 水 潤 滑 に お い て 耐 摩 耗 性 が 高 い こ と で 実 績 の あ る PEEK 材とSUS材の組合わせを採用している。また、各部のクリアランスを適切に設計、
精密加工及び管理することで漏れを少なく抑えて、「水」という低粘性流体でも高効率かつ 良好な耐久性を実現可能としている。
図1.2.7に水圧ポンプの圧力に対する流量及び出力特性を示す。図より、回転数1500rpm
で圧力 5MPaの場合で流量約 21L/min、同圧力 14MPaの場合で流量約20L/minとなって おり、容積効率で約 90%以上を示している。主な仕様を以下に示す。
図 1.2.7 水圧ポンプの性能曲線
0 1 0 2 0 3 0 4 0 5 0
-1 5 -1 0 -5 0 5 1 0
0 5 1 0 1 5 2 0
P -Q ,L
Q[L/min] L[kW]
P [M P a ]
P O W E R ( 5 0 0rp m )
F L O W (1 500rpm )
P O WE R ( 1 50 0 rpm )
F L O W (1 000rpm ) F L O W (5 00rpm )
P O W ER ( 1 0 00 rp m )
0 1 0 2 0 3 0 4 0 5 0
-1 5 -1 0 -5 0 5 1 0
0 5 1 0 1 5 2 0
P -Q ,L
Q[L/min] L[kW]
P [M P a ]
P O W E R ( 5 0 0rp m )
F L O W (1 500rpm )
P O WE R ( 1 50 0 rpm )
F L O W (1 000rpm ) F L O W (5 00rpm )
P O W ER ( 1 0 00 rp m )
仕 様
メーカ :KYB㈱
型式 :WPP―15
アキシャルピストンポンプ 適応流体 :水道水 (材質 SUS304)
定格圧力 :14 MPa 基本吐出量 :15cc/rev 回転数 :1500rpm
(7)水圧モータ
水圧モータは、高圧の流体エネルギーを回転エネルギーに変換するための機器である。
本水圧モータは、アキシャルピストン型で、定格圧力 14MPa、基本吐出流量 6cc/revで水 圧モータへの流入流量により最高 4000rpm まで回転可能で、上記の水圧サーボ弁を使い 流体の流入方向及び流量を変えることにより、回転方向と回転数を自由に制御することが できる。今回の試験では、ロボティクスでの制御を想定しているため、水圧モータ出力軸 に減速機(ハーモニックドライブ、減速比 100分の1)を連結し、回転数を減速させてい る。例えば、水圧モータへの流入流量が 10L/minの場合、水圧モータ軸は約 1000rpmで 回転し、更にハーモニックドライブの出力軸は約 10rpmの回転数となる。水圧モータにつ いても、上記の水圧ポンプと同様に摺動部位は、PEEK 材とSUS材の組合せが採用され、
実用的な性能と耐久性を実現している。
図 1.2.8 に水圧モータの圧力に対する流量及び出力トルク特性を示す。図より、回転数
1500rpmで圧力14MPaの場合で流入流量約 12L/min、出力トルク約12Nm が得られるこ
とがわかる。主な仕様を以下に示す。
図1.2.8 水圧モータの圧力に対する流量及びトルク特性
仕 様
メーカ :WHC(英国)
型式 :m6
アキシャルピストンモータ 適応流体 :水道水 (材質 SUS304)
定格圧力 :14 MPa 基本吐出量 :6cc/rev
回転数 :max4000rpm(両回転)
出力トルク :12Nm@1500rpm、14MPa
第2章 一自由度システム試作モデルの設計・製作
はじめに図 2.1.1は、ADSの将来的な応用例の一つである回転系及び直線系を組合わせ た多自由度システムをイメージしたものである。本報告書においては、このような多自由 度ロボティクスを実現する前段階として、直線系と回転系を分けた一自由度システムでの 試作モデルの設計・製作し、そのシステム制御の機能検証と課題抽出を行うことを目的と している。
直線系システムについては、本 F/Sの最終目標である蒸気量加減弁システムへの応用を 見据え、また回転系システムについては、一般産業用機械への応用展開を図るべく、第 1 章にて詳述した結果に従い、水圧ユニット及び直線系、回転系試験装置の設計、製作を行 った。
2.1 水圧ユニット
(1)主な構成機器
表2.1.1に今回製作した水圧ユニットの主な仕様、図2.1.2にユニット外形図、写真2.1.1、
写真 2.1.2 にシステム全景とユニット外観を各々示す。水圧ユニットの構成する主な機器
について以下に述べる。
水圧ポンプをはじめ、圧力調整弁、アキュムレータ、切換弁等の各機器は、圧力 14MPa において十分な基本性能、耐圧性能を有している。水圧回路内のコンタミ対策として、高 圧ラインと低圧ラインにそれぞれフィルタを設けて水質管理を行っている。水圧サーボ弁 は、2 本のシリンダを独立に制御可能とするため、水圧ユニットに 2 台搭載可能とし、ま た、各所に切換弁を設置して種々の試験に対応可能とする水圧回路を構成した。今回、2 台のサーボ弁を独立に制御するため、制御用シリンダの制御は本水圧ユニットで行い、負 荷発生用シリンダの制御には既存の水圧ユニットを流用した。試験中の水温を一定に保つ よう冷却機(チラー)を設置している。各部分の配管は SUS 鋼管により接続し、試験時 に発生する振動発生を抑え、また、試験機周辺の電気機器等からのノイズ影響を受けない よう、適宜ノイズ対策も施した。
減速機付水圧モータ 減速機付水圧モータ
水圧シリンダ
負荷 回転系システム1
回転系システム2 直線系システム
図2.1.1 多自由度ADSロボティクスのイメージ
機器 メーカ/型式 備考/仕様など 電動モータ 東芝機械㈱/VLBSV-10K30 max4000rpm,10kW 水圧ポンプ KYB㈱/WPP-15 15cc/rev,1500rpm,5kW
水圧サーボ弁 KYB㈱/WSV-20、SX-103 20L/min,14MPa、入力電圧±10V リリーフ弁 廣瀬バルブ工業㈱/
WRV-T04-14-11
最大 40L/min, 調整圧力 0~14MPa 2-2切換弁 廣瀬バルブ工業㈱/
WSO-G03-A10C-11
最大 30L/min,14MPa アキュムレータ 日本アキュムレータ㈱/
N19.9-LLT5-PDL
ブラダ式,最高使用圧力 19.9MPa, 耐圧 29.9MPa,容積 5L
チラー SMC㈱/ HRG-010-A-A 10kW,空冷冷凍式 フィルター ㈱増田製作所
/W-SPHs06-10S-SUS
SMC㈱/FGDTB-06-M010V-BX77
10μフィルタ
表2.1.1 ユニットの主な仕様
制御盤 制御用PC
水圧ユニット 直線系試験装置
水タンク
写真2.1.1 システム全景
図2.1.2 ユニット外形
アキュームレータ 水圧サーボ弁
2-2切換弁
高圧フィルタ 制御用シリンダへ
負荷シリンダへ
水タンク
低圧フィルタ
アキュムレータ
写真2.1.2 ユニット外観
(2)水圧回路
図 2.1.3に今回製作した水圧ユニットの水圧回路を示す。
リリーフ弁
水圧サーボ弁 2-2切換弁 電動モータ
高圧フィルタ
アキュムレータ
図2.1.3 水圧回路
図2.1.1 水圧回路図
減速機 負荷
水圧モータ
直線系試験装置 回転系試験装置
制御用ユニット
負荷用ユニット X Y
表 2.1.2 機器一覧
No. 機器名称 型番 メーカー
1 電動サーボモータ VLBSV-10K30 東芝 2 カップリング CL-110 三木プーリ
3 水圧ポンプ WPP-15 KYB
4 チェック弁 HTICZ-R-04-04-21-SS-52 廣瀬バルブ
5 アキュムレータ N19.9-LL5-PDL 日本アキュムレータ
6 圧力計 OSG-AT-G1/4-60×25MPa ASK
7 圧力調整弁 WRV-T04-14-11 廣瀬バルブ 8 高圧ラインフィルタ W-SPHs06-10S-SUS 増田製作所
9 2-2切換弁 WSO-GO3-A10C-11 廣瀬バルブ
10 接点付圧力計 GC61-174-47N300 長野計器 11 水圧サーボ弁 WSV-20 KYB
12 ボール弁 BV-T04SS-21 廣瀬バルブ
13 熱交換器 BXN-214-PEO-18 日阪製作所
14 リリーフ弁 RLT4V-300 アイビーエスジャパン
15 流量計 HO 1/2×1/2 日本フローコントロール
16 リターンフィルタ FGDTB-06-MO10V-BX70 SMC 17 液面ゲージ KLA-200B-C 協和 18 温度調節機(測温抵抗体) E52-P20C D=6.4 オムロン 19 フロートスイッチ SH-10 ノーケン 20 エアブリーザ MB-02 増田製作所 21 排水バルブ UEL 20A KITZ 22 給水バルブ UTK 15A KITZ 23 アンロード弁 WSO-G03-A10C-11 廣瀬バルブ
24 欠番
25 圧力計 OSG-AT-G1/4-60-1.6MPa ASK
26 冷凍式サーモクーラー HRG-010A-A SMC
27 欠番
28 圧力スイッチ CE20-373-25ID 長野計器 29 圧力センサー PVL-200KD 共和 30 圧力センサー PVL-50KD 共和
図には今回製作した水圧ユニットと直線系試験装置及び回転系試験装置、負荷用ユニッ トが示されている。本図を用いて、流体の流れを説明する。直線系及び回転系試験装置に ついては次節以降に詳述し、負荷用ユニットは既存のものを使用するので説明は割愛する。
水圧ポンプ(図中③)により高圧の作動水を吐出し、リリーフ弁(図中⑦)で回路内の 圧力を一定に調整する。その高圧水は、2-2 切換弁(図中⑨-X)を通過し、水圧サーボ弁 へと供給される。水圧サーボ弁の 2箇所の制御ポートはそれぞれ水圧シリンダの左右の圧 力室につながっている。水圧サーボ弁への入力信号を切換えることで水圧シリンダへ入る 作動水の流れの方向と左右の圧力室の圧力が変化して、流体エネルギーが直線運動に変換 されることでシリンダロッドが伸縮する。シリンダから流出する作動水はタンクへ戻る。
同様に負荷用水圧シリンダは上記水圧回路とは独立して制御される。回路上では切換弁 B(図中⑫)を常時閉としておくことで制御用回路と負荷用回路を分離させている。負荷 用水圧シリンダも上述と同様の原理で伸縮動作する。
2.2 直線駆動系試験装置
表 2.2.1に今回製作した直線系試験装置の主な仕様、図2.2.1に試験装置概略、写真2.2.1
に試験装置の外観を各々示す。本装置は、荷重計(ロードセル)を介して直列に制御用シ リンダに負荷用シリンダを接続し、各シリンダは 2台の水圧サーボ弁で独立に制御する構 成とした。ロードセルは引張り、圧縮の両方向の荷重を検出できる。
シリンダ動作及び内部状態を計測するため、ロードセルの他に制御用シリンダ側に変位 センサ、シリンダの各室に圧力センサを設置した。水圧ユニットからシリンダまでは SUS 鋼管で配管し、試験中の振動防止のため、防振ゴムを介したステーで固定した。
試験時には変位、推力及び各部の圧力を同時に計測し、パソコンにてデータ解析を行う。
システム試験の詳細結果については、第 3章に記す。
機器 メーカ/型式 備考/仕様など
水圧シリンダ ㈱村上製作所(シリンダ)
㈱阪上製作所(シール)
内径φ50 ロッド径φ28 ストローク 250mm、
推力 14kN@7MPa 28kN@14MPa 速度 0.19m/s(無負荷)
ロードセル ㈱共和電業/LUK-A-20KN 最大荷重 20kN、引張り、圧縮 ストロークセンサ 新光電機㈱/LT1-270R ストローク範囲 270mm
圧力センサ ㈱共和電業/PVL-200KD 圧力範囲 0~20MPa
コントローラ dSPACE -
表2.2.1 直線系試験装置の主な仕様
図2.2.1 直線系試験装置
位置信号
荷重信号
制御信号 負荷信号
負荷シリンダ 制御シリンダ
コントローラ
ロードセル 変位センサー
水圧ユニット 水圧ユニット
水圧サーボ弁 水圧サーボ弁
位置信号
荷重信号
制御信号 負荷信号
負荷シリンダ 制御シリンダ
コントローラ
ロードセル 変位センサー
水圧ユニット 水圧ユニット
水圧サーボ弁 水圧サーボ弁
2.3 回転駆動系試験装置
表 2.3.1に今回製作した回転系試験装置の主な仕様、図2.3.1に試験装置概略、写真2.3.1
に試験装置の外観を各々示す。本装置は、水圧モータにより減速機(減速比 100 分の 1)
を駆動し、減速機の出力軸の角度を制御する構成としている。出力軸側にブラシレスレゾ ルバの角度センサを内臓して、小型一体化を図り、各種の試験に対応できるように負荷回 転半径や負荷重量等を自由に設定できるような構成とした。
水圧モータを制御するサーボ弁と水圧モータの間は SUS 鋼管にて接続し、慣性により 発生するキャビテーションやサージ圧で水圧モータが破損しないよう保護回路も設けた。
図 2.3.2 に保護回路の模式図を示す。図中の点線枠が保護回路に相当する部分であり、リ
リーフ弁は、サージ圧発生時、逆止め弁はキャビテーション発生時に各々機能する。
水圧モータの動作及び内部状態を計測するため、減速機の出力軸に組み込んだ角度セン サの他、水圧モータの各ポートに圧力センサを設置した。
直線系試験と同様に試験時には回転角及び各部の圧力を同時に計測し、制御、データ解 析を行う。
システム試験の詳細結果については、第3章に記す。
機器 メーカ/型式 備考/仕様など
水圧モータ WHC/M6 基本吐出量 6cc/rev,圧力 15MPa, トルク 13Nm
減速機 ハ ー モ ニ ッ ク ド ラ イ ブ / CSF-65-100
減速比 1/100,許容トルク 951Nm 90°/sec@水圧モータ 1500rpm レゾルバ 多 摩 川 精 機 ㈱/スマートシ
ン TS2660N31E64
ブラシレスレゾルバ
慣性負荷 - 両 端 に円 板 錘 を設 置 し、慣 性 負 荷 を 模擬 回転半径 300mm
圧力センサ ㈱共和電業/PVL-200KD 圧力範囲 0~20MPa
コントローラ dSPACE -
表2.3.1 回転系試験装置の主な仕様
写真 2.2.1 直線系試験装置の外観
負荷用シリンダ 制御用シリンダ
変位計 ロードセル
ステー
圧力センサ
図2.3.2 保護回路模式図
角 度 信 号
制 御 信 号
コ ン ト ロ ー ラ
水 圧 モ ー タ 慣 性 負 荷
レ ゾ ル バ
水 圧 ユ ニ ッ ト 水 圧 サ ー ボ 弁
ハ ー モ ニ ッ ク ド ラ イ ブ
カ ッ プ リ ン グ 角 度 信 号
制 御 信 号
コ ン ト ロ ー ラ
水 圧 モ ー タ 慣 性 負 荷
レ ゾ ル バ
水 圧 ユ ニ ッ ト 水 圧 サ ー ボ 弁
ハ ー モ ニ ッ ク ド ラ イ ブ
カ ッ プ リ ン グ
図2.3.1 回転系試験装置概略
写真 2.3.1 回転系試験装置外観
ハーモニックドライブ 負荷装置
水圧モータ
タンク
サージ圧・キャビテーション保護回路
Bポート
逆止弁① リリーフ弁① 水圧モータ
Aポート
逆止弁② タンク
リリーフ弁②
タンク
サージ圧・キャビテーション保護回路
Bポート
逆止弁① リリーフ弁① 水圧モータ
Aポート
逆止弁② タンク
リリーフ弁②
サージ圧・キャビテーション保護回路
Bポート
逆止弁① リリーフ弁① 水圧モータ
Aポート
タンク
Aポート
逆止弁② タンク
リリーフ弁②
第3章 アクチュエータ部モデル装置の機能検証と課題抽出
3.1 一自由度直線駆動系
本節では、従来油圧で行われている発電所内のタービンガバナの制御に水圧制御を適用 した場合の実現可能性について検討する。タービンガバナは図 3.1.1 に示されるように、
駆動力を発生するシリンダ、発電機タービンへの蒸気流量を制御するガバナ弁部、この両 者を接続するリンク機構の三つに分けられる。本 F/Sではこの機構に対し、シリンダ部を 模した水圧シリンダ(以下、制御シリンダ)と、ガバナ弁部あるいはリンク機構からの反 力・流体力等の外乱及び負荷を模擬するための水圧シリンダ(以下、負荷シリンダ)を同 一直線上に配置する構造として試験機を構成した(図 3.1.2参照)。両シリンダは独立した 水圧サーボ弁により制御される。
図 3.1.1 一般的なタービンガバナ構造図
(東京電力株式会社プレスリリース,調整運転中の柏崎刈羽原子力発電所 2号機における タービン制御系の油漏えいに関する調査結果添付資料より,一部変更 )
図3.1.2 実験用水圧シリンダの外観図
以下ではまず負荷シリンダの制御を行わず、無負荷状態における制御シリンダの制御特 性試験を行った結果を示し、次いで負荷シリンダ側でシリンダ変位に対するばね特性を実 現させた場合の実験結果を示す。負荷側でばね負荷を実現して実験を行うことは、タービ ンガバナ系の制御シリンダが緊急時に遮断動作を行えるよう予圧を掛けたコイルばねにつ ながっていることに対応しており(図 3.1.1参照)、より現実的な問題設定を考慮する目的 がある。補償器は以下に述べるような比例制御及び適応制御の二種類の補償器を考える。
以下では、まずこれら二つの補償器を概観した上で、無負荷状態のシリンダ制御の実験 結果を示し、次いでばね負荷の下での実験結果を示すこととする。
3.1.1 補償器概論
以下では、比例制御及び適応制御補償器の構造あるいは理論を一般的に概観する。
(1)比例制御器
比例制御とは、図 3.1.3 に示されるように制御対象への制御入力を目標値と制御対象か らの制御量との誤差情報から直接的に決定する方法の総称であり、最も直感的な制御入力 の生成法である。この誤差情報をどの程度増幅して制御入力にするかを決定する係数は比 例ゲインと呼ばれ、これは与えられた制御仕様から試行錯誤的に調整されることが多い。
本 F/Sでは、サーボ弁への入力電圧を一定値にした場合にはシリンダが一定速度で伸縮動 作を行い、制御量であるシリンダ変位が無限に増大することから、制御対象内には積分器 が存在していることがわかる。したがってシリンダの目標変位が一定の場合には、理論的 には比例制御のみで目標値への追従が実現されることになる。3.1.2節ではこの実験 結果を示す。
図 3.1.3 比例制御系の構造
(2)適応補償器
上記で概説したように比例制御パラメータ(PID パラメータ)は、作動条件、目標値、
負荷等により決まる状態(動作点)が変化するとそれに対応させて適宜変える必要があり、
そのために調整工数が非常に大きなものとなる傾向がある。
一方で PID制御とは異なり、制御対象の動特性を表現する数学モデルに基づいて補償器 を設計する方法もある。この方法では数学モデルが現実のシステムを正確に記述できてい れば、それに基づく補償器設計もより正確に行えるので性能向上が見込めることになる。
しかし現実には制御対象の正確なパラメータを知ること自体が困難、あるいは不可能なこ とが多い。したがって制御対象に対する“大まかな”事前情報を基に補償器自体が制御パ ラメータを調整し、所望の目標値と制御対象の出力の間の誤差を漸近的に小さくするよう な性能を持つことが望ましい性能となる。これが適応制御理論の枠組みであり、図 3.1.4 にその構造を模式的に示す。適応機構ではこの誤差を小さくするように、入力の係数とな
っている制御パラメータの調整が行われる。
本F/Sで制御対象となっている発電設備における水圧駆動方式タービンガバナ制御では 正確な物理パラメータを入手することが難しく、また入手できたとしてもそれらは運転条 件により変動することが容易に予想される。特に水圧サーボ弁における圧力-流量特性は事 前の特性パラメータの正確な入手は難しいとされている。したがって同システムの制御系 設計問題では、適応制御補償器の適用による性能向上、制御パラメータ調整工数の低減化 が期待できる。
図 3.1.4 適応制御系の構造
3.1.2 実験結果
本節では実験条件及び実験結果についてまとめる。
(1)実験条件及び負荷側シリンダのばね負荷制御
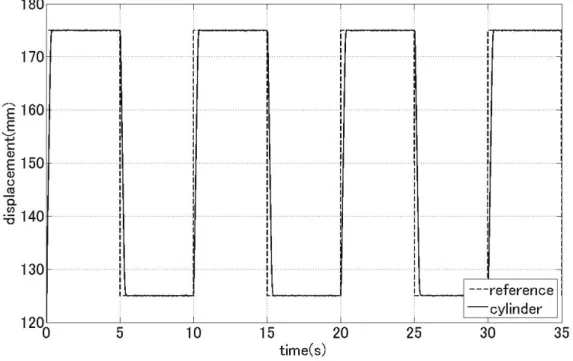
全ての実験において供給圧力は 7MPaとし、また最もシリンダを引き戻した点を変位の 原点に取り、伸び方向の変位を正と定義している。目標変位は図 3.1.5 のような矩形波と して与え、制御シリンダの全ストロークの中点(x=125mm)からx=175mmまで 50mm のストロークを周期 10sで往復させるようなケースを想定した。この目標値に対して、制 御仕様は昨年度の調査研究報告書を基に位置制御偏差を 0.1mm以下に、整定時間を 4s以 下に設定している。またオーバーシュート量は、これが大きくなるとガバナシート部を損 傷する可能性があるために 0.1mmを超えないものと規定した。
図3.1.5 目標変位(矩形波)
更に負荷条件として、無負荷、及び10kN/mのばね定数を負荷側水圧シリンダで実現し た場合の二種類について検討した。負荷側シリンダでは、シリンダストローク
x
に対応した反力を実現する必要があるため、以下のような比例制御則を採用した(図 3.1.6参照)。
{
1 10 ( ( ) ) ( )}
)
(t k 4 x t x0 f t
u = l × − − ---(1) ただし
k
lは負荷側での比例制御ゲイン、x
0はシリンダの中点に対応する125mm、f (t )
はロードセルから検出された反力である。実際には試行錯誤により比例ゲイン
k
lを0.5 と選 んでいる。図3.1.6 負荷側シリンダ制御系のブロック線図
この制御則による負荷の実現の様子を図 3.1.7 に示す。今回与える制御側シリンダのス トロークは 50mm であるので、負荷側では 0.5kN の反力が作用することになるが、同図 よりこれが正しく実現されていることが読み取れる。なおこの負荷制御の時定数は 50ms 程度であるので、制御側シリンダに要求されている仕様に比して十分早くばね負荷が実現 されていると判断できる。
図3.1.7 ロードセルの応答波形
(2)比例制御による実験結果
無負荷状態において、比例ゲインを様々に変化させた場合の制御側シリンダの実験結果
を表 3.1.1にまとめるが、この範囲内で最も定常偏差が小さくなるものは比例ゲインが 0.5
の場合であった。図 3.1.8 にはこの時の時間応答を示す。結果的にはシリンダを伸ばした 位置で-20μm、引き込んだ位置で+30μm程度の定常偏差であった。この差異はシリンダ ロッドの動作方向の静止摩擦力に依存しているものと解釈されるが、実際のガバナの位置 制御に対しては十分な制御性能であると判断される。なお、表中の偏差は位置センサに混 入するノイズの影響を低減するため、表内の各時刻までの 0.5s間分の時間区間における移 動平均を求めたものである。
表3.1.1 比例ゲインの変化に対するシリンダ制御実験結果(無負荷)
偏差 mm 比例
ゲイン
時定数
s 5s 10s 15s 20s
オーバー シュート
0.4 0.214 0.029 0.081 0.058 0.106 なし
0.5 0.214 -0.017 0.056 -0.017 0.029 なし
0.6 0.214 0.025 0.080 0.037 0.091 なし
図3.1.8 制御シリンダの時間応答(無負荷、比例ゲイン0.5)
次に、負荷側制御シリンダで負荷を与えた(ばね定数 10kN/m)場合の実験結果を示す。
無負荷の場合と同様に選定すると、有負荷の場合にはオーバーシュートが現れない範囲で 最も定常偏差が小さかった比例ゲインは 0.8 であった。この場合には、時定数は 0.326s、
定常偏差はシリンダを伸ばした位置で-25μm、引き込んだ位置で+10μm 程度であった。
図 3.1.9 にこの比例ゲインの場合の制御シリンダ変位の時間応答を示す。ただしこれらの
性能を実現するためには、ある範囲で比例ゲインを総当たり的に試行して結果を評価する 必要があり、膨大な工数となる。
図3.1.9 制御シリンダの時間応答(有負荷、比例ゲイン0.8)
(3)適応制御による実験結果
まず無負荷の場合における制御シリンダの実験結果を示す。ここでは適応制御系で重要 となる制御パラメータの更新則における更新ゲイン
1 / g
を何通りか与えており、実験結果を表 3.1.2 にまとめる。速応性を改善するためにはより大きな更新ゲインを与えればよい
が、この場合にはオーバーシュートが現れ始める。したがってこの結果からは、オーバー シュートが発生しない限界の値として更新ゲイン 1/120×10-3 が選ばれることになるが、
これは定常偏差が要求値を満たしていない。よって、通常の適応制御手法では制御仕様を 満たす制御精度を得ることは難しい。
表3.1.2 更新ゲイン
g
の変化による時定数と定常偏差(無負荷)更新ゲイン
g / 1
時定数 s
定常偏差 mm
仕様値を超える オーバーシュート
1/90×10-3 0.214 +0.104 あり
1/120×10-3 0.214 -0.356 なし
1/130×10-3 0.214 -0.397 なし
1/140×10-3 0.214 -0.459 なし
そこで、シリンダ変位が目標値にある程度近付いたら更新ゲインをそれまでよりも大き な値に切換え、その時点から制御パラメータの更新が適切に行われるようにアルゴリズム の改善を行う。具体的には、更新ゲインが 1/120×10-3の場合には50mm の目標値に対し て 0.5s程度の間に誤差が0.4mm程度まで急速に減少するものの、それ以降の制御パラメ ータの更新が非常に緩やかになるため、この誤差の値を境に更新ゲインをそれまでの 100 倍程度大きい 1×10-3に切換える。これにより、改善前では緩やかになったままであった 誤差の減少を再び大きくすることができるため、より高い精度の位置制御が達成されると 期待される。図 3.1.10にこの手法によるシリンダ制御の結果を示す。
図3.1.10 適応制御パラメータの更新ゲインを切換える手法による
制御シリンダの時間応答(無負荷)
次に、負荷側制御シリンダで負荷を与えた(ばね定数 10kN/m)場合の実験結果を示す。
この場合もパラメータ更新ゲインを常に一定値に固定した場合には、目標値近傍での追従 性が悪化することが予想されるため、一度
1 / g
を固定して実験を行い、定常偏差が出始め た時の誤差の値が約 0.3mm であったことを参考に、以下のように更新ゲインを変化させ る。⎪⎪
⎩
⎪⎪
⎨
⎧
×
<
×
×
≥
×
=
−
−
−
−
3 3
3 3
10 3 . 0 ,
10 1
10 3 . 0 ,
120 10 1 /
1
e e g
ただし上式における
e
は誤差である。このアルゴリズムにより位置制御実験を行った結果を図 3.1.11に示す。制御精度は非常に良好で、定常偏差は 10μm以内に収まっている。
この手法は一度適応制御による誤差の変化を確認し、位置決め誤差が効率的に減少しなく なる値を把握するだけで良く、また動作点の変化に対する依存度が小さいことを確認して いる。したがって比例制御に比べて現場で利用しやすいという利点がある。
図 3.1.11 適応制御パラメータの更新ゲインを切換える手法による
制御シリンダの時間応答(有負荷)
更に、制御開始時に既に制御シリンダに反力が作用していた場合の実験結果を図 3.1.12 に示す。この例では、制御開始時に500Nが作用しており、50mmシリンダを伸ばした点 では 1kNの反力が実現されている。この場合にも適応系は実験開始後に直ちに反力に打ち 勝ち、所望のシリンダ変位を実現していることがわかる。特にこの制御系のメリットは、
動作点や負荷が変化しても PID 制御のように制御パラメータをその都度設定し直す必要 がなく、これまでの制御系をそのまま適用できる点にある。
図3.1.12 適応制御パラメータの更新ゲインを切換える手法による 制御シリンダの時間応答(有負荷、初期反力あり)
3.1.3 実験結果の比較及び考察
比例制御及び適応制御で得られたシリンダの位置決め性能を比較する。
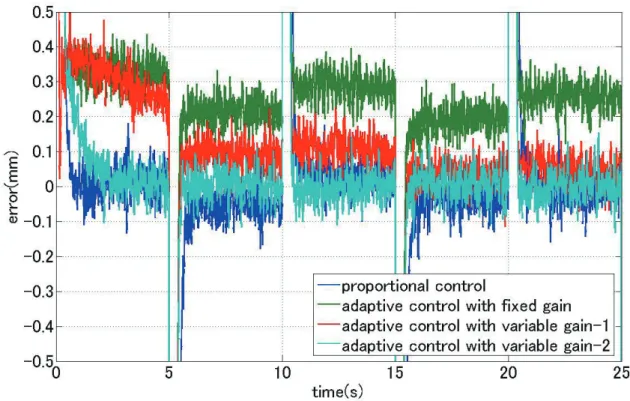
まず無負荷の場合に得られた制御精度を表 3.1.3 にまとめる。更に比例制御、及び更新 ゲインを固定した場合とこれを可変にした場合の適応制御の結果を図 3.1.13に示す。ただ し表中、可変ゲインの場合のゲイン切換則は、位置決め誤差の大きさにより適応制御パラ メータの更新の度合いを変えるよう以下のように選んだ。
適応制御(可変ゲイン1):
⎪⎩
⎪⎨
⎧
×
<
×
×
≥
×
=
−
−
−
−
3 4
3 5
10 4 . 0 ,
10 1
10 4 . 0 ,
10 1 / 1
e e g
適応制御(可変ゲイン 2):
⎪⎩
⎪⎨
⎧
×
<
×
×
≥
×
=
−
−
−
−
3 3
3 5
10 4 . 0 ,
10 1
10 4 . 0 ,
10 1 / 1
e e g
表3.1.3 各制御手法における制御精度(無負荷)
偏差 mm 制御手法
5s 10s 15s 20s 25s
オーバー シュート 比例制御 -0.017 0.056 -0.017 0.029 -0.009 なし 適応制御(固定ゲイン) -0.322 -0.210 -0.277 -0.195 -0.253 あり 適応制御(可変ゲイン1) -0.245 -0.075 -0.091 -0.032 -0.037 なし 適応制御(可変ゲイン2) -0.000 0.007 -0.007 -0.005 -0.003 なし
※網掛け部はシリンダ伸ばし工程を、無背景はシリンダ戻し工程を、それぞれ示す。
図3.1.13 無負荷における各制御手法による位置誤差
これらより、比例制御に比べて制御パラメータの更新度合いを誤差に応じて切換える効 果が明確となる。すなわち適応制御は比例制御に比べ、位置決め精度がかなり向上するこ とがわかる。
次に仮想的なばね負荷が存在する下での制御精度を表 3.1.4 にまとめる。また、このと きのシリンダ位置誤差を図 3.1.14(負荷 0-0.5kN)及び図 3.1.15(負荷 0.5-1.0kN)にま とめる。
表3.1.4 仮想的なばね負荷の下での各制御手法による制御精度
偏差 mm 制御手法
5s 10s 15s 20s 25s
オーバー シュート 比例制御 -0.026 0.011 -0.025 0.002 -0.034 なし 適応制御(固定ゲイン) -0.284 -0.256 -0.273 -0.254 -0.243 あり 適応制御(可変ゲイン) -0.006 0.006 0.011 0.008 0.001 なし
※網掛け部はシリンダ伸ばし工程を、無背景はシリンダ戻し工程を、それぞれ示す。
負荷の存在する場合には、適応制御において速応性を向上させるとオーバーシュートが 避けられず、表 3.1.4では固定ゲインの場合にこれが現れている。したがって固定ゲイン では速応性か定常偏差のどちらかしか制御仕様を満たせない。一方、偏差に基づいて制御 パラメータの更新ゲインを切換えると、速応性だけでなくオーバーシュートを抑えた小さ な定常偏差を実現できることが示される。
図3.1.14 仮想的なばね負荷の下での各制御手法による位置誤差(負荷0-0.5kN)
図3.1.15 仮想的なばね負荷の下での各制御手法による位置誤差(負荷0.5-1.0kN)
図 3.1.14 と図 3.1.15 を比較すると、適応制御では同一の制御則を用いているにも関わ
らずほぼ同じ定常偏差のレベルに収めることができていることが読み取れる。したがって 負荷の存在する場合にも、適応制御において制御パラメータの更新ゲインを可変にした場
![図 1.1.4 発電出力の変更時の応答 (出典:参考文献[5])](https://thumb-ap.123doks.com/thumbv2/123deta/7348896.2436094/12.892.127.700.107.1064/図114発電出力の変更時の応答出典参考文献5.webp)
![図 1.1.5 一自由度回転運動システムの制御概念図 参考文献 [1] 赤尾武彦:変圧運転を採用した中間負荷火力発電プラント、電気学会雑誌、98-2 (1978)、105/112 [2] 佐藤、柴田:電力系統より期待される火力プラントの制御技術、電気学会雑誌、98-2 (1978)、113/120 [3] 浜場、横山、加藤、高林:平常時運用データを用いた系統定数推定手法、電気学会 論文集 B 編、111-6(1993)、 635/643 [4] 豊田、和田:非線形システム制御系設計のための](https://thumb-ap.123doks.com/thumbv2/123deta/7348896.2436094/13.892.120.773.121.293/一自由度システムプラントプラントデータ系統定論文集システム.webp)