構造物健全度診断の効率化のための加速度 センサICタグ多点観測システムの開発
構造物健全度診断の効率化のための加速度 センサICタグ多点観測システムの開発
第2010-09号
茨城大学 工学部
教授
横山 功一
平成23年11月
助成研究者紹介
□研究代表者:
横 山 功 一(よこやま こういち)
茨城大学名誉教授(博士(工学))
1) Yokoyama, K. and Harada, T. : Structural Monitoring using Piezoelectric Film, Proceedings of the 24th US-Japan Bridge Engineering Workshop, Ninneapolis, Minnesota, USA, pp.245-253, 2008 2) 横山功一,原田隆郎,黒田 聡,Rafiquzzaman, A.K.M.:ニューラルネットワークを用いた
橋脚の地震時リアルタイム損傷判定法に関する検討,日本地震工学会論文集,Vo.7,No.5, pp.31-44,2007
3) 町口敦志,横山功一,原田隆郎,高木優任:構造ヘルスモニタリングにおけるひずみ測定 の温度影響の補正に関する研究,土木学会構造工学論文集,Vol.53A,pp.718-726,2007 4) Rafiquzzaman, A.K.M. and Yokoyama, K. : Application of operating vehicle load to structural
health monitoring of bridges, Smart Structure and Systems, Vol.2, No.3, pp.275-293, 2006
5) Rafiquzzaman, A.K.M. and Yokoyama, K. : Highway bridge damage detection from operating vehicle response, 土木学会構造工学論文集, Vol.52A, pp.237-246, 2006
□研究分担者:
原 田 隆 郎(はらだ たかお)
茨城大学工学部准教授(博士(工学))
1) Harada, T. and Yokoyama, K. : Development of Bridge Inspection System by Using Wireless Network Technologies, The 4th International Workshop on Advanced Smart Materials and Smart Structures Technologies, Tokyo, Japan, 2008
2) Harada, T. and Yokoyama, K. : Development of Sharing-Type Genetic Algorithm for Optimum Maintenance Strategies, Joint 4th International Conference on Soft Computing and Intelligent System and 9th International Symposium on Advanced Intelligent Systems, pp.604-608, 2008 3) 原田隆郎,横山功一:生体脈波情報を用いた道路の乗り心地に関する検討,第27回日本
道路会議,No.20049,2007
4) Harada, T. and Yokoyama, K. : Cost evaluation in bridge inspection strategies by using real options method, Life-Cycle Cost and Performance of Civil Infrastructure Systems, pp.165-171, 2007 5) 原田隆郎,吉田勘平,横山功一:計画案のフレキシビリティを考慮した道路舗装の維持管
理計画策定システムの開発,土木学会舗装工学論文集,第9巻,pp.25-33,2004
□研究分担者:
齋 藤 修(さいとう おさむ)
株式会社福山コンサルタント研究員(博士(工学))
1) 齋藤 修,堀江和也,石山大祐,安原一哉,桑原祐史:MEMS 加速度センサを用いた IC タグによる地盤振動の解析と可能性,社団法人日本測量協会応用測量論文集,Vol.19, pp.81-90,2008.6
2) 齋藤 修,桑原祐史,安原一哉,宮部紀之:茨城県CO2グリッド構想に関する検討,土木 学会,土木情報利用技術論文集,Vol.17,pp.219-224,2008.11
3) Saitou, O., Yasuhara, K.:Implementation of visualizing ground and environmental Information by applying wireless IC sensor tag, Proc. of Vietnam-Japan Symposium on Mitigation &
Adaptation of Climate-change-induced Natural Disasters, pp.253-256, 2007.9
目 次
第1章 はじめに ......................................................... 4 1.1 現在の維持管理の状況 ........................................... 4 1.2 点検に係わる問題点 ............................................. 4 1.3 新たな提案ならびに研究計画 ..................................... 5 1.4 期待される効果・インパクト ..................................... 5
第2章 加速度センサICタグ多点観測システムの開発 ........................ 7 2.1 多点観測システムの開発目標 ..................................... 7 2.2 無線加速度センサICタグの高機能・高精度化 ...................... 7 2.3 無線通信技術の必要性と問題点 ................................... 10 2.4 システム構成と測定方法 ......................................... 11 2.5 アプリケーションの設計 ......................................... 13 2.6 小型化と低価格化への取り組み ................................... 14
第3章 開発システムを用いた予防保全の提案と実証試験 ........................ 15 3.1 はじめに ....................................................... 15 3.2 対象橋梁と計測対象ケーブルの概要 ............................... 15 3.3 ケーブルの振動計測 ............................................. 17 3.4 ケーブル定着部の折れ角の頻度分布情報を利用した状態監視 ......... 20 3.5 卓越振動数の変化情報を利用した状態監視 ......................... 23
第4章 おわりに .......................................................... 30 4.1 結論 ........................................................... 30 4.2 今後の展望 ..................................................... 31
参考文献
第1章 はじめに
1.1 現在の維持管理の状況
現在までに数多くの社会基盤施設(インフラストラクチャ)が建設・整備され,日常生活や社 会経済活動を支えてきている.これらの施設は,今後も十分なサービスを提供できるようにしっ かりと保全していくことが求められている.
社会基盤施設の代表的な構造物である橋梁の維持管理についてみると,構造物の健全/損傷状 況を把握するために5年ごとに目視を主にした定期点検が行われるようになってきており1),そ の結果を基に,修繕計画が立てられ,必要な補修が行われ,所要の機能を発揮できるようにして いる.
同時に,点検情報を集積し分析して,人的財政的制約の下で構造物群に対して効果的な維持管 理を進めることを目指して,アセットマネジメントに繋げようとの試みがなされている.
1.2 点検に係わる問題点
現在の維持管理では,設計・施工・維持管理における不具合や配慮不足あるいは想定外の事象 が原因で生じている損傷に対しては,事後的な保全により解決してきており,それ以外の多くの 損傷は,時間とともに進行する中性化,腐食,疲労などであり,劣化損傷を予測して予防的な保 全につなげるのが適当である.これら劣化損傷は顕在化するまでの潜伏期間が長く,顕在化して からでは効果的な予防保全が難しい.現在定期点検で行われている目視検査では,構造物内部の 状況を捉えることができない.また,潜伏期における変化を捉えられない.
そのため,点検や健全度診断に関連して様々な技術開発が行われてきている.非破壊検査技術 を用いることにより構造物内部の状況を把握することが出来るようになってきている.しかし,
一般の構造物に対して兆候も何もないところで,大掛かりな検査をするのは無駄であり現実的で はない.また,各種センサを構造物に設置し損傷を検知し維持管理に役立てようとする構造ヘル スモニタリングの研究2)も進められているが,センサで大きな構造物に生じる小さな損傷を検出 することは,原理的には可能であったとしても,現実の橋梁においては容易ではなく,また,観 測システムの長期信頼性・耐久性の問題や財政・労力面での問題もあり,実用化には至っていな
い.
しかしながら,モニタリングにより直接微細な損傷を検知するのではなく,時間とともに進行 する中性化,腐食,疲労などに対して,その原因となる環境・荷重作用の状況を把握し,その情 報に基づいて維持管理を進めることは効果的な維持管理につながる.すなわち,鋼材の腐食の場 合,紫外線や水分・塩分により塗膜の劣化が進み,保護効果が薄れると錆が発生し鋼材の腐食が 進む.従って,塗膜厚さや錆び厚のような直接的な情報ばかりでなく,架橋地点における日射,
紫外線,降水量,湿度などの環境情報もモニタし維持管理に役立てることが望ましい.疲労の場 合は,部材の応力履歴が関係し,原因としては自動車走行,地震,強風などが挙げられる.
1.3 新たな提案ならびに研究計画
・ 現在の維持管理システムにマッチした安価で取扱が容易なモニタリングシステムを開発し,
損傷に関連する構造物の挙動や環境状況を把握し,それに基づいて維持管理(condition-based maintenance3))を進める新しい手法を提案する.
・ この研究計画では,具体的には,損傷タイプとして疲労損傷をとりあげる.疲労損傷には応 力履歴が深く関係する.そこで,構造物の応力履歴に関連する振動状況を加速度センサを用 いて計測し,振動のレベルや卓越振動数の時間的空間的情報を把握・分析することで予防保 全につなげることができることを実証する.
・ 橋梁構造物では,自動車走行,地震,強風などにより,時間とともに変動する複雑な応力が 働くので,応答を測定するには,構造物のいろいろな箇所に加速度計を多数配置し,長期間 連続的にデータを収集することが望ましい.
・ 『開発するモニタリングシステム』は,複数のセンサ,ワイアレス送信,データ収録システ ムおよび解析ソフトウェアで構成され,センサ自身にワイアレスデータ送信装置を備え,ア クセスポイントへ測定データをリアルタイムで送信し,そのデータをパソコンで収録し,必 要な解析を行うことができる.すなわち,多点加速度観測の容易な,取り扱いやすくコスト パフォーマンスに優れたシステムとなっている.データ収録は,サイトでもあるいは管理事 務所でも可能であるが,今回の研究範囲では,斜張橋のケーブルを対象とした実証試験を行 うこととしたので,加速度センサは,長さが同一あるいは異なるケーブルに取り付けそれぞ れの応答を比較できるようにした.データ収録は,斜張橋の歩道部で行った.
1.4 期待される効果・インパクト
開発するシステムは,構造物に多数のセンサを配置し,それにより構造物における環境作用な らびに荷重作用を継続的に,また空間分布的に測定し,把握することが出来る.環境作用として は,温度,湿度,降雨量,日射量,紫外線などがあり,構造部材の中性化,塗膜劣化,腐食など
に関連する.また,荷重作用としては,自動車,地震,風などによる外力による変形や振動があ り,疲労損傷に繋がる.今回のシステムは,MEM(Micro Electro Mechanical System:マイクロ・
エレクトロメカニカル・システム)加速度センサを用いることで必要な測定精度を保ちつつ低価 格を実現し,ワイアレス通信技術を用いることによりケーブル敷設の必要がなくまた測定箇所の 変更を容易にした,取り扱いやすく経済性に優れたシステムとなっている.これにより,今後大 規模な構造物の現場計測を今までよりも容易にし,実構造物の情報を維持管理等において活用す ることができるようにする.
今回の研究でとりあげた斜張橋における実証例でみてみると,加速度センサを4本のケーブル に取り付け,各ケーブルの振動を測定する.ケーブルの振動は,自動車走行状況,風などの気象 状況,また地震の生起などによりその大きさが異なるが,長期間ではどのレベルの振動が生じて いるかを把握することができるので,累積疲労損傷の予測に役立てられ,点検にフィードバック することができる.またその際の振動数はどの程度かが明確になる.もし,ケーブル本体が疲労 損傷しケーブルの剛性が変化する,あるいはケーブルの両端の定着部に疲労・劣化損傷が生じて 拘束度合いが変化するような場合には,ケーブルの振動数に変化が生じるので,振動数をモニタ することはダイレクトに損傷検知につながる.
以上より,今回開発するシステムでは,環境荷重作用の累積度合いを把握することにより,時 間と共に進行する損傷劣化の予測・劣化度評価に活用でき,これにより目視点検による外観情報 ではできなかった潜伏期における劣化損傷の評価ができるようになり,今まで出来なかった予防 保全が実現する.これにより,5 年ごとにルーチン的に行っていた定期点検の点検項目を合理 化・省力化できると共に,最適な時期を逃すことなく予防措置を執ることができ,経済性の面で も格段に向上することが期待される.
第 2 章 加速度センサ IC タグ多点観測システムの開発
2.1 多点観測システムの開発目標
本研究では,以下のような特徴を有する多点観測システムを開発し,現在行われている維持管 理体制に組み込み,維持管理の省力化・効率化を目指すことにする.
1) 安価・小型・低消費電力の加速度センサを実現するように,MEMS(Micro Electro Mechanical System:マイクロ・エレクトロメカニカル・システム)加速度センサを用いる.
2) 複数の加速度センサを構造物に取り付け,効果的な測定を行うために,センサ位置を移動さ せたり,追加したりするので,センサの識別とワイアレス送信を行うために,IC タグ技術 を活用する.
3) 加速度は常時微動の小さな振動レベルから自動車の走行による振動などの環境振動レベル までの測定を可能にするように最大±70galとし,測定値の精度を確保するために AD分解
能を16bit,1センサ当たりサンプリング振動数は 200Hz程度とする.この条件では,微弱
無線を利用するセンサICタグは手軽であるものの,通信速度が著しく遅いためにリアルタ イムでのデータ測定には不向きである.そこで,通信方式はIEEE802.15.4(準拠)とし,見 通し通信距離(アクセスポイント~センサ間)は約50mとした.
4) データ収録はパソコンを用い,アクセスポイントと呼ばれる受信中継局を介してセンサと接 続する.
5) 測定結果をモニタするために,パソコンのモニタ画面で5ch分の加速度測定結果を確認でき るようにし,FFT解析も行い図示できるようにする.
6) 現地観測ばかりでなく,管理事務所などの遠隔地で測定するには,本システムのデータを集 めるアクセスポイントから直接インターネットにアクセスする方式に切り替えるだけで遠 地観測システムの構築が可能である.
2.2 無線加速度センサ IC タグの高機能・高精度化
加速度を測定し地盤や構造物の振動特性を理解し適切に対応することは,安全安心な街づくり に不可欠である.プレート境界に近くまた活断層の影響を受けやすい日本は,地震による地盤災
害が後を絶たない.地震の被害規模は,地震の大きさや震源の深さ,また震源からの距離と深く 関わりを持っている.また,地震波の増幅特性は表層地盤での S 波速度に大きく依存する.そ のほか地震基盤から工学的基盤までの地盤構造の違いによっても,その変化は大きく異なる.さ らに近年,長周期地震や,やや長周期地震による災害が懸念されている.現在,一般的に地震動 を計測する手法として,強震観測網がある.しかし,高価であり高密度の多点計測は難しい.そ こで,その補助ツールとして,加速度センサICタグの適用が研究されている.安価・小型・低 消費電力であるセンサICタグは広範囲の多点測定を実現するツールとして期待される.本研究 は安価なMEMS(Micro Electro Mechanical System:マイクロ・エレクトロメカニカル・システム)
加速度センサを用いて,加速度センサICタグを作り,センシングネットワークを構成するもの である.
茨城大学ではこれまでMEMS加速度センサICタグを利用した,橋梁の車両通過時の振動測定 による現地でのモニタリングや列車通過による振動を用いた盛土・切土に着目した地盤モニタリ ングを研究してきた4),5).MEMS加速度センサは当初STマイクロ社の製品を選択したが,セン サICタグS-NODE(S-NODE:(独)産業技術総合研究所が企業と共同で開発した小型のMEMS 加速度センサICタグである)を構成したときに,図2.1のようなピンノイズや,感度不足,分 解能不足などの諸問題が発生した.さらに12bitA/Dコンバータの処理能力や直流に近い低周波 成分の測定(図2.2参照)にはノイズの影響が有り,常時微動測定には不向きであることが分か った.また現地測定を繰り返した結果,加速度センサICタグとしても種々の不具合が発見され,
加速度センサ,A/Dコンバータ,記録部分,アプリケーションソフト等に試作改善を行ってきた.
加速度波形(USBセンサタグ)20.0Hz
-150 -100 -50 0 50 100 150
0 1 2 3 4 5 6 7
時間(sec)
加速度(gal)
図2.1 加速度センサICタグのピンノイズ
加速度波形(USBセンサタグ)0.5Hz
-15 -10 -5 0 5 10 15
0 1 2 3 4 5 6 7
時間(sec)
加速度(gal)
図2.2 加速度センサICタグの低周波出力
当初センサICタグは微弱無線を利用してデータの授受を行う表2.1の仕様であった.微弱無 線は手軽に利用できるが,通信速度が著しく遅いためにリアルタイムでのデータ測定には不向き である.そこで,データの授受は外部メモリー(SDカード)に直接書き込み,測定終了まで保 存する改造等を行ったが多点計測の同時測定のタイミングが取れないなど問題点が多かった.
表2.1 S-NODE加速度センサICタグ仕様 測定範囲 ±2.0G or ±6.0G
測定分解能 12bit 100msecサンプリング 非直線誤差 X,Y軸 ±2% Z軸 ±3%
内臓CPU ROM 48kbyte,RAM 4kbyte 外部1MBメモリ 消費電力 稼動時 0.7mA以下 待機時 3mμA以下 大きさ 36(W)X30(D)X3.2(H)mm
そこで,今回,これらの問題点を全面的に改善してMEMS加速度センサICタグを試作した.
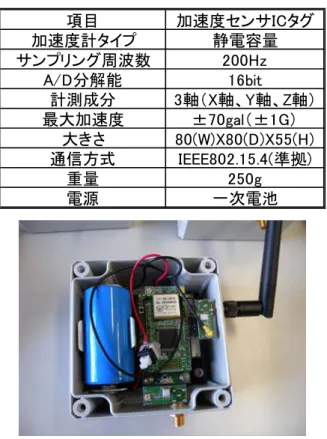
表2.2に今回試作した加速度センサICタの仕様を,外観を図2.3に示す.本MEMS加速度セン サICタグは加速度センサに静電容量タイプの三軸MEMS加速度センサを用いている.S/Nを向 上するために,二つのMEMS加速度センサをディファレンシャル(差動)で用いている.電源 は消耗時の電圧低下によるデータの不定を防止するために,電池消耗時の電圧-電流の肩特性が 急に変化する一次電池を用いた.測定最大加速度は±70gal~±1Gの間をソフトウェアにより変 更可能である.通信方式はIEEE802.15.4(準拠)であり,見通し通信距離(アクセスポイント(受 信中継局)間)は約50mである.サンプリング周波数は200Hzであるが,ソフトウェアのパラ メータ設定により変更可能である.センサICタグにはユニークなID(IDentification)が割り当 てられる.表2.3にセンサICタグのデータ構成を示す.
表2.2 加速度センサICタグ仕様 項目 加速度センサICタグ
加速度計タイプ 静電容量
サンプリング周波数 200Hz A/D分解能 16bit
計測成分 3軸(X軸、Y軸、Z軸)
最大加速度 ±70gal(±1G)
大きさ 80(W)X80(D)X55(H) 通信方式 IEEE802.15.4(準拠)
重量 250g
電源 一次電池
図2.3 加速度センサICタグ外観
表2.3 センサICタグのデータ構成
データ ヘッダー SrcID DstID コマンド シーケンスNo 固定 固定 X Y Z X Y Z ・・・・・ 固定 フッター
バイト数 1 1 1 1 4 1 1 2 2 2 2 2 2 ・・・・・ 2 2
データ XXh 01~05h 00h XXh - XXh XXh - - - - - - ・・・・・ FFh AAAAh
2.3 無線通信技術の必要性と問題点
従来,振動などの計測システムは高価で大型である.データは信頼性を維持するために有線を 利用するのが一般的である.しかし,複数の計測器を利用して多点測定を行う場合には膨大な長 さのケーブリングが必要になる.また計測点の変更にバリアブルに対応するには非常な手間を要 する.そこでケーブリングが不要で,計測点の変更が容易な近距離無線通信技術を利用する.ま た消費電力の少ないことや,構成される部品(半導体チップ)の価格が安いことも重要である.
表2.4に必要となる近距離無線通信技術の比較表を示す.PC通信の代表的な3種類と電子タ グ(RFID)である.3種類を比較すると,消費電力においてIEEE802.15.4/ZigBeeが優れている.
本研究に利用する加速度センサICタグでは伝送方式としてIEEE802.15.4(準拠)を採用し本実 験に使用した.
さらに目に見えない無線は様々な環境影響を受けデータ通信上,不安定要素を抱えるため,こ れら熟知した運用が必要である.実際に計測時に発生した通信関係の不具合と対応策を表2.5に 示す.
表2.4 近距離無線通信技術の比較(総務省情報通信統計データベース)
表2.5 計測時の通信不具合と対応策
No. 不具合 対応策 備考
1 データ収集(通信)時波形の歪
電波指向性による不具合.アク セスポイントを高く設置(1.5m)す ることで対応
2 大型車両連続通過時データ収集
できない.あるいは波形が歪む 同上
3 5ch同時測定時にモニタによる監 視で波形表示に遅れが発生する
PC処理能力不足・通信再送発 生による遅延(アクセスポイント 位置変更で対応)
不具合発 生時には アクセスポ イントを路 面に設置
2.4 システム構成と測定方法
システム構成を図2.4に示す.1システムは1台のPCに1台のアクセスポイント,最大5台 の加速度センサICタグ速度センサICタグがセットとなる(図2.5参照).加速度センサを増や す時にはPC を増設することになるが,通信時の混信を避けるために,通信CH(11ch,16ch,
23ch,26ch)を変更する.最大システムではPC4台,20台の加速度センサICタグの共存が可能 であるが,他に IEEE802.15.4 準拠で通信を行う機器が存在しないことが前提となる.測定方法 は,加速度センサICタグが測定した加速度データを,計測用PCに近距離無線通信を利用して 送信し計測用PCでデータを格納するものである.計測用PCがデータを受信するために,USB インターフェースを持つアクセスポイント(受信機)を計測用PCと接続する.将来的には現地 観測からインターネットを利用した遠地観測が望ましいが,本システムはデータを集めるアクセ
スポイントから直接インターネットにアクセスする方式に切り替えるだけで遠地観測システム の構築が可能である.
遠地測定を実現することは橋梁検査時の効率を著しく向上するものである.加速度センサICタ グ側では間欠動作で電池消耗を抑えるが,現地で電源が確保できれば連続測定が可能である.遠 地測定にはインターネット回線が不可欠であり,そのためには携帯通信端末やデータ通信カード が有効である.図2.6にインターネットを用いたシステム構成図を示す.インターネットを通じて 点検員が現地に行かなくても,現地の状況が把握できるシステムが構築できる.加速度センサ IC タグ一つ一つがインターネットに接続する機能を有すればシステム構成が単純にできるが,
莫大な通信コストが発生し,現状では現実的なシステムでは無い.
図2.4 システム構成図 図2.5 加速度センサICタグの1システム
図2.6 インターネットを用いたシステム構成図
2.5 アプリケーションの設計
計測用PCのアプリケーション機能を表2.6に示す.標準画面は5ch分の加速度センサICタグ のPC側アプリケーションソフトの通信確認のモニタ画面である(図2.7参照).データ解析部の 画面を図2.8に示す.測定データはバイナリでテキストファイルに保存される.保存したデータ を利用するためにCSVにデータ変換を行う.変換時にFFT解析・表示を行う.
表2.6 アプリケーションの機能一覧
No. 機能 詳細
1 波形モニター 最大5ch 2 通信ポート設定 COMポート 3 FFT解析機能 結果表示 4 ファイル変換 CSV変換
図2.7 PCのモニタ画面
図2.8 PCのモニタ画面(解析部)
2.6 小型化と低価格化への取り組み
MEMS加速度センサICタグは小型・低価格が特徴であり,この特徴があるために多点計測が 現実のものとなる.しかし,実際に製品として使用する場合は量産効果による低価格化を期待す るほかにない.本研究ではセンサIC タグの価格を10,000 円以内/個を目指して小型・低価格に も取り組んだ.選択したハードウェアはS-NODEである.加速度センサを小型基板に組み込み,
微弱無線で通信を行うこのMEMS加速度センサICタグをノイズを低減し実用に耐える性能に引 き上げた.S-NODEは小型のMEMS加速度センサICタグである.システム構成はアクセスポイ ント,計測PCとセンサICタグである.300MHz帯域の微弱無線を利用し通信距離は10数mと 短く伝送速度も9600bpsと低速である.測定分解能は12bit100msec程度で高機能ではないが,運 用による多点計測の可能性を開くものである.
第 3 章 開発システムを用いた予防保全の提案と実証試験
3.1 はじめに
第2章で開発したシステムについて紹介したが,このシステムが現場での測定に支障なく使用 できるかどうかを確認し,同時にこのシステムを用いて現場測定を行うことにより,効果的な予 防保全が実現することを実証するために,斜張橋において測定を行った.
今回,斜張橋を選定し,そのケーブルに着目したのは,斜張橋はケーブルが橋桁を支える高次 不静定の複雑な構造物であり,その主要構造部材であるケーブルは柔軟なため揺れやすく,定着 部の疲労が問題になる.ケーブルの損傷は斜張橋にとっては致命的なものとなり,維持管理上重 要なポイントとなっている.なお,ケーブルは細長い柔軟な構造であるため,損傷が生じた場合 には他部材との相互影響が少ないといった特徴もある.これは,1本の部材が損傷した場合には,
その部材に構造特性の変化が顕著に現れ,損傷検知は,一般には非常に難しいといわれているが,
他の構造物部材に比べると,損傷検知の可能性を試す対象として好ましいと考えられたからであ る.
今回の現場測定は,測定条件を変えて交通条件・気象条件が異なる複数回で行った.データ収 録は,斜張橋歩道部においてパソコンを用いた.インターネットを用いた事務所へのデータ転送 はここでは含まれていない.また,リアルタイムでのデータ処理も行っていない.ただし,今回 の測定は基本技術の確認を目指したものであり,残されたテーマは今後の作業範囲と考えている.
3.2 対象橋梁と計測対象ケーブルの概要
本研究では,斜張橋の万代橋(よろずよばし)を対象橋梁として取り上げた.図3.1に万代橋 の位置図と橋上写真を,図3.2に橋梁一般図6)を示す.万代橋は国道349号の橋梁であり,那珂 川を渡河している(左岸側が那珂市,右岸側が水戸市).橋長357m,幅員25m(片側2車線,
中央分離帯あり)であり,平成7年9月から供用されている.高さ34mの2本の主塔から片側 6本(合計24本)のケーブルが張り出している.
振動計測の対象としたケーブルは中央径間のケーブルのうち水戸市側の主塔と那珂市側の主 塔から張り出されているそれぞれ2本のケーブルである.図3.3に示すように,水戸市側の一段
目のケーブルをM1,二段目のケーブルをM2とし,水戸市側の一段目のケーブルをN1,二段目 のケーブルをN2とする.
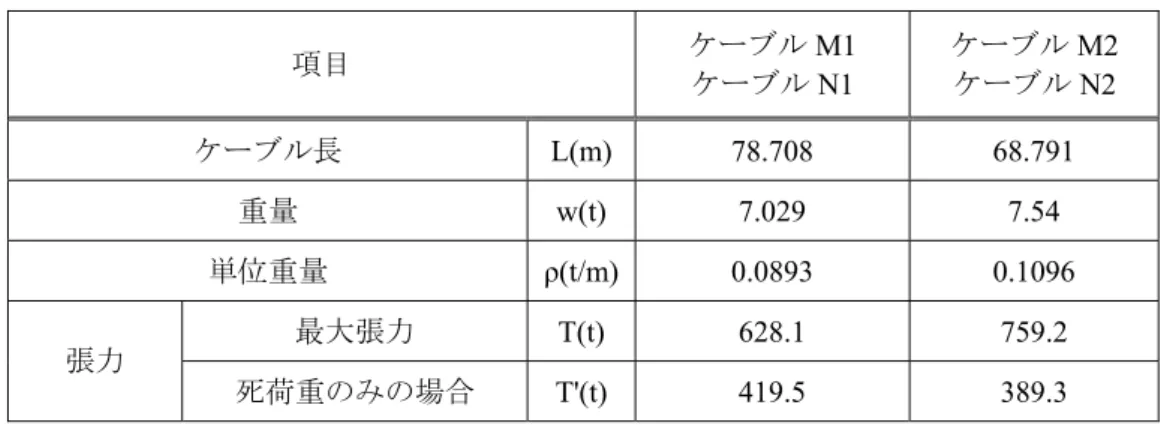
対象ケーブルの基本諸元を表3.1に示す.ここで,各ケーブルの張力については,死荷重のみ の場合と最大張力の2ケースを示した.死荷重のみの場合とは,橋梁の死荷重とプレストレス力,
後死荷重がかかったものであり,最大張力とは死荷重,後死荷重,プレストレス力,活荷重,支 点沈下の影響を考慮した値である.
図3.1 万代橋の位置図(左)と橋上写真(右)
図3.2 万代橋の一般図6)
中央径間
水戸市側 那珂市側
M1 M2
N1 N2
図3.3 計測対象ケーブルの選定
表3.1 計測対象ケーブルの基本諸元
項目 ケーブルM1
ケーブルN1
ケーブルM2 ケーブルN2
ケーブル長 L(m) 78.708 68.791
重量 w(t) 7.029 7.54
単位重量 ρ(t/m) 0.0893 0.1096 最大張力 T(t) 628.1 759.2 張力
死荷重のみの場合 T'(t) 419.5 389.3
3.3 ケーブルの振動計測
(1)加速度センサ IC タグの設置方法
振動計測は,本研究で提案・開発する加速度センサICタグ多点観測システムを利用して実施 した.加速度センサICタグの仕様や基本性能については,第2章を参照されたい.
本研究では4本のケーブルの振動測定を行うため,4台の加速度センサICタグ(子機)を利 用した.受信側の親機は1台で計測用PCと接続し,4本のケーブルの加速度応答を収集した.
加速度センサICタグは,図3.4(左)に示すように中央分離帯の床面から1,300mmの高さに 設置した.設置方法としては,ケーブルを鉄板製の板で挟み込む治具を作成し,その上に加速度 センサICタグを取り付けた.加速度センサICタグは,x軸がケーブル軸方向,y軸が橋軸方向,
z軸がケーブルの軸に対して直角方向になるように設置した(図3.4右).
加速度センサ IC タグ
加速度センサ IC タグ 斜張橋
ケーブル
センサ取り
付け治具 z
x y センサ取り
付け高さ 1300mm
図3.4 ケーブル設置図
(2)測定日および計測方法
ケーブルの振動測定は,表3.3に示すように2011 年の1月26日(以下,測定Ⅰとする),6
月15日(以下,測定Ⅱとする),7月26日(以下,測定Ⅲとする)の3回実施した.
測定Ⅰでは,ケーブルAおよびBに対して,14時に90秒の計測を3回実施した.また,測 定Ⅱでは11時に180秒の計測を3回実施,測定Ⅲでは8時~16時まで2時間ごとの毎時150秒 の計測を各5回実施した.なお,計測のサンプリング間隔⊿tは1/200秒(サンプリング周波数 200Hz)とした.
また,振動計測は斜張橋が供用状態の時に実施した.つまり,風や通過車両の影響を受けたケ ーブルの加速度応答を計測している.
表3.3 測定日と計測内容
測定日 計測内容
平成23年1月26日(水) 14時に90秒の計測を3回実施 平成23年6月15日(水) 11時に180秒の計測を3回実施
平成23年7月26日(火) 8時~16時まで2時間ごとに計測 毎時150秒の計測を各5回実施
(3)計測値の解析方法
計測値の解析では,まずサンプリング間隔⊿t=1/200秒(サンプリング周波数200Hz)で計測 されている加速度応答データを⊿t=1/20秒(20Hz)に間引いて利用した.そして,計測された3 方向(x,y,z軸方向)の加速度応答のうち,z軸方向の加速度応答を利用した.なお,解析に 用いたz軸方向の加速度応答は,各計測の開始時間より10.00秒から112.35秒までの2048個の データ(⊿t=1/20秒)とした.ただし,測定Ⅰは計測時間が90秒であり2048個のサンプリング データを取得できなかったため,10.00秒から61.15秒までの1024個のデータを用いた.
(4)解析データの評価
解析データの一例として,平成23年7月26日の12時に計測されたケーブルM1,M2,N1, N2の加速度波形を図3.5に示す.
このように,開発された多点観測システムを利用することで,本解析で利用するために十分な 質のデータ(各ケーブルの応答加速度)が収得できている.
計測データの収得に際しては,第2章で述べたように,より効果的な計測方法を提案できてお り,データ収集における問題点は改善されている.
-20 -10 0 10 20
10 20 30 40 50 60 70 80 90 計測時間(秒)100 110
応答加速度(gal)
(a)ケーブルM1
-20 -10 0 10 20
10 20 30 40 50 60 70 80 90 計測時間(秒)100 110
応答加速度(gal)
(b)ケーブルM2
-20 -10 0 10 20
10 20 30 40 50 60 70 80 90 計測時間(秒)100 110
応答加速度(gal)
(c)ケーブルN1
-20 -10 0 10 20
10 20 30 40 50 60 70 80 90 計測時間(秒)100 110
応答加速度(gal)
(d)ケーブルN2
図3.5 解析データの一例(平成23年7月26日,12時,Z方向加速度波形)
3.4 ケーブル定着部の折れ角の頻度分布情報を利用した状態監視
本研究では,ケーブルに取り付けた加速度センサICタグの計測データ(ケーブルの振動加速 度)より,このケーブルの定着部の折れ角の大きさと,繰り返し頻度を評価し,ケーブル定着部 の疲労程度の長期モニタリングを提案することで,開発したシステムの有用性を確認した.この 検討結果は,疲労詳細調査の必要度合いの判定の目安として有効と考えられる.
図3.6に示すように,加速度センサICタグの設置点の計測加速度から変換された変位D(m) と設置点のケーブル端部からの距離sから折れ角θ(=D/s)を算出した.ケーブルM1,M2,
N1,N2のそれぞれについて折れ角θを算出するための基本諸元を表3.4に示す.
D s H L
h
) ( /s rad
D
θ図3.6 ケーブル端部の折れ角θ
表3.4 各ケーブルの折れ角θを算出するための基本諸元
項目 ケーブルM1
ケーブルN1
ケーブルM2 ケーブルN2
ケーブル長 L(m) 78.708 68.791 ケーブル設置高さ H(m) 32.000 30.000 センサ設置高さ h(m) 1.300 1.300 端部からセンサまでの距離 s(m) 3.198 2.981
図3.7に平成23年1月26日分(N=1024)の14時計測データに基づく,ケーブルM1および ケーブルM2の定着部の折れ角θ(rad)の頻度分布を示す.データ数N=1024(約50秒分)の 頻度分布であるが,継続的にデータ収集することで累積頻度を把握でき,これによって折れ角が 端部応力にもたらす影響を把握できる.図3.7より,異なる長さのケーブルに対して折れ角の頻 度の違いはほとんど無く,また図3.8に示す変位応答の最大値をみても1~2cmであり,ケーブ ル端部への影響は無いと考えられる.
同様に,図3.9に平成23 年6月15日分(N=2048)の 11 時計測データに基づく,ケーブル M1,M2,N1,N2の定着部の折れ角θ(rad)の頻度分布を,図3.10に平成23年7月26日分(N=2048)
の14時計測データに基づく,ケーブルM1,M2,N1,N2の定着部の折れ角θ(rad)の頻度分 布を示す.図3.9では,ケーブルM1,M2,N2の折れ角の頻度分布には大きな違いない.ただ し,ケーブルN1だけ若干形状が異なっている.しかし,ケーブルM1およびケーブルM2の最 大折れ角も図3.7と大差はない.また,図3.10においても,すべてのケーブルの折れ角の頻度分 布に大きな違いなく,最大折れ角も先述の2回と大差はない.
このように,本システムでは計測された加速度から変位を導出し,端部の折れ角の大きさと頻 度を把握することができる.そして,このケーブル端部の折れ角を長期モニタリングできるシス テムに展開することで,ケーブルの疲労に繋がるような応力レベルの有無が確認できることがわ かった.
0 50 100 150 200 250
-0.0050 -0.0025 0.0000 0.0025 0.0050 折れ角(rad)
度数(平均)
0 50 100 150 200 250
-0.0050 -0.0025 0.0000 0.0025 0.0050 折れ角(rad)
度数(平均)
(a)ケーブルM1(3回計測の平均) (b)ケーブルM2(3回計測の平均)
図3.7 平成23年1月26日分(N=1024)14時計測の折れ角の頻度分布
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
10 20 30 40 50 60 70 80 90 計測時間(秒)100 110
応答変位(m)
(a)ケーブルM1の変位(3回計測の最大)
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
10 20 30 40 50 60 70 80 90 計測時間(秒)100 110
応答変位(m)
(b)ケーブルM2の変位(3回計測の最大)
図3.8 平成23年1月26日分(N=1024)14時計測の加速度の時刻歴応答