九州大学学術情報リポジトリ
Kyushu University Institutional Repository
3次元ローレンツ・ミンコフスキー空間内の平均曲率 零曲面に関する研究
赤嶺, 新太郎
https://doi.org/10.15017/1931720
出版情報:Kyushu University, 2017, 博士(数理学), 課程博士 バージョン:
権利関係:
Doctoral Dissertation
Zero mean curvature surfaces in Lorentz-Minkowski 3-space
Shintaro Akamine
Graduate School of Mathematics, Kyushu University
Supervisor: Professor Miyuki Koiso
February 14, 2018
Contents
List of figures iv
List of tables v
Acknowledgments iii
1 Introduction 1
2 Causal characters of zero mean curvature surfaces of Riemann type in
Lorentz-Minkowski 3-space 4
2.1 Introduction. . . 4
2.2 Notations and Preliminaries . . . 6
2.3 ZMC surfaces of Riemann type . . . 8
2.3.1 Circles in L3 . . . 8
2.3.2 ZMC surfaces of Riemann type which are foliated by Euclidean circles . . . 9
2.3.3 ZMC surfaces of Riemann type foliated by circles in timelike par- allel planes . . . 10
2.3.4 ZMC surfaces of Riemann type foliated by circles in lightlike par- allel planes . . . 11
2.4 Causal characters of ZMC surfaces of Riemann type . . . 13
2.4.1 Causal characters of ZMC surfaces of Riemann type foliated by Euclidean circles . . . 13
2.4.2 Causal characters of ZMC surfaces of Riemann type foliated by hyperbolas . . . 16
2.4.3 Causal characters of ZMC surfaces of Riemann type foliated by parabolas . . . 23
2.5 ZMC surfaces containing a lightlike line . . . 28
2.5.1 Characteristic of ZMC surfaces containing a lightlike line . . . 28
2.5.2 ZMC surfaces of Riemann type foliated by Euclidean circles con- taining a lightlike line . . . 29
2.5.3 ZMC surfaces of Riemann type foliated by hyperbolas containing a lightlike line. . . 31
2.5.4 ZMC surfaces of Riemann type foliated by parabolas containing a lightlike line. . . 34
2.6 New examples of ZMC entire graphs which have all causal characters . . . 37
3 The number of catenoids connecting two coaxial circles in Lorentz-
Minkowski space 39
3.1 Introduction and statement of results. . . 39
3.2 Catenoids in Lorentz-Minkowski space . . . 40
3.3 Elliptic catenoids spanning two coaxial circles . . . 42
3.3.1 Spacelike surfaces. . . 43
3.3.2 Timelike surfaces . . . 45
3.4 Hyperbolic catenoids spanning two coaxial circles . . . 48
3.5 Parabolic catenoids spanning two coaxial circles. . . 50
4 Behavior of the Gaussian curvature of timelike minimal surfaces with singularities 52 4.1 Introduction. . . 52
4.2 Preliminaries . . . 54
4.2.1 Timelike surfaces and their shape operators . . . 54
4.2.2 Timelike minimal surfaces and minfaces . . . 55
4.2.3 Null regular curves . . . 58
4.3 The Gaussian curvature near regular points . . . 59
4.3.1 A characterization of flat points. . . 59
4.3.2 The sign of the Gaussian curvature near non-flat points . . . 60
4.4 Symmetries and the diagonalizability of the shape operator . . . 62
4.5 Behaviors of the Gaussian curvature near singular points on minfaces. . . 64
4.5.1 Frontals and fronts . . . 65
4.5.2 Criteria for singular points on minfaces . . . 66
4.5.3 Behavior of the Gaussian curvature near singular points . . . 67 A The condition for a surface foliated by circles in lightlike parallel planes
to be rotational 73
B Proof of the fact that the surface (2.44) is not a ruled surface 74
C Geometry of minfaces 76
Publications 82
List of Figures
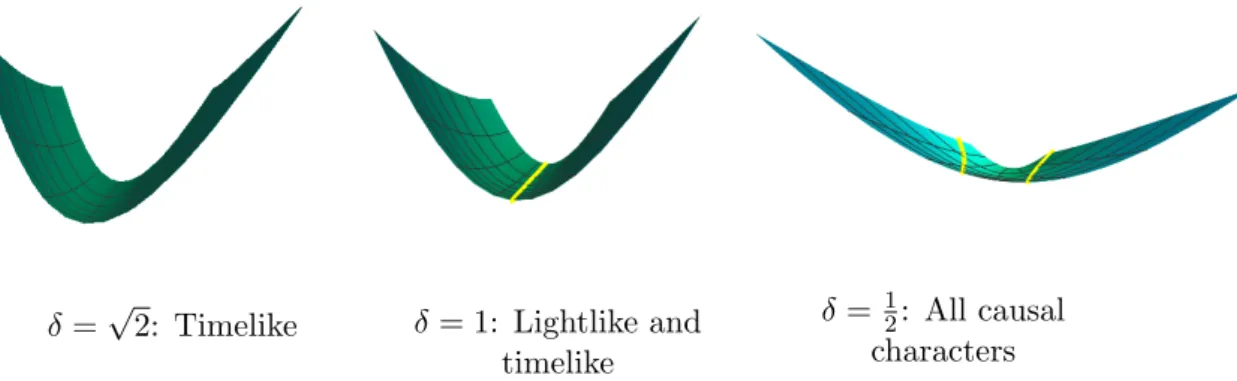
2.1 Type II ZMC surfaces of Riemann type (2.10) whose parameter δ vary from √
2 to 1/2.. . . 27
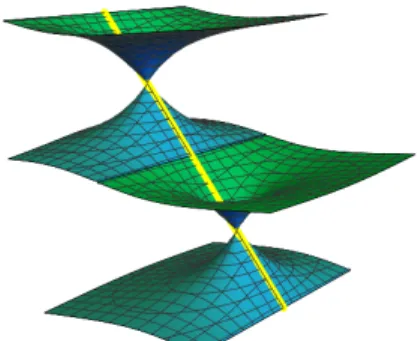
2.2 A surface which has all causal characters and whose lightlike part consists of a straight line and two non-degenerate null regular curves. . . 27
2.3 Anα+-type surface foliated by Euclidean circles and straight lines (general type). . . 31
2.4 An α−II-type surface foliated by Euclidean circles (general type). . . 31
2.5 An α−III-type surface foliated by Euclidean circles (Singular type). . . 31
2.6 An α−II-type surface foliated by hyperbolas (general type). . . 34
2.7 An α−I -type surface foliated by hyperbolas (general type). . . 34
2.8 An α−III-type surface foliated by hyperbolas (singular type). . . 34
2.9 An α+-type surface foliated by parabolas and straight lines (general type). 36 2.10 Anα−I-type surface foliated by parabolas and a straight line (general type). 36 2.11 An α−III-type surface foliated by parabolas (singular type). . . 36
2.12 A ZMC entire graph which has all causal characters and whose lightlike curves. . . 38
3.1 Graphics ofgh for different values ofh: from left to right,h= 2,7 and 14. 46 3.2 Two timelike elliptic catenoids connecting two coaxial circles. Left: two coaxial circles of radius r = 1 and h = 20 far apart (blue) connected by two profile curves f(s) = sin(as)/a for values a ≃ 0.285 and a ≃ 0.706 (red). Right: the corresponding two timelike elliptic catenoids. . . 48
3.3 Two hyperbolic catenoids of type I connecting two coaxial circles. Left: two coaxial hyperbolas of type I of radiusr= 2 andh= 2 far apart (blue) connecting by two profile curves f(s) = cosh(as)/a for values a≃ 0.589 and a≃2.126 (red). Right: the corresponding two hyperbolic catenoids of type I. . . 50
4.1 The timelike elliptic helicoid (the blue part) and the timelike elliptic catenoid.. . . 57
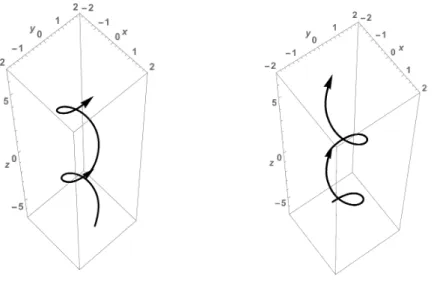
4.2 Examples of non-degenerate null regular curves with positive sign (the left figure) and negative sign (the right figure). . . 59
4.3 A timelike minimal surface on which the sign of the Gaussian curvature changes along quasi-umbilic curves (black curves except the intersection). 60 4.4 The timelike Enneper surface with a planar symmetry and its conjugate with a line symmetry (the yellow parts represent the singular points). . . 64
4.5 A cuspidal edge, swallowtail and cuspidal cross cap. . . 65
4.6 A minface with cuspidal edges on which the sign of the Gaussian curvature changes along a quasi-umbilic curve. . . 68
4.7 Cuspidal edges withκs>0 (left) and κs <0 (right). . . 70 4.8 The Kuen’s surface. . . 71
List of Tables
2.1 µand α. . . . 29 2.2 Examples of ZMC surfaces according to types ofα. . . . 29 3.1 The number of catenoids connecting two coaxial circles according to the
type of rotation group and the causal character of surfaces. In (*), the radii of the circles coincide. . . 40 3.2 Profile curves of the catenoids inL3. . . 43
Acknowledgments
Special thanks are due to the author’s supervisor Professor Miyuki Koiso for her invaluable support, constant encouragement, many helpful comments and discussions.
The author would like to express his deepest gratitude to Professor Masaaki Umehara and Professor Kotaro Yamada for suggesting many interesting topics about zero mean curvature surfaces, to Professor Shoichi Fujimori and Professor Atsufumi Honda for their discussions and many suggestions. The author is also grateful to Professor Udo Hertrich Jeromin for giving a great opportunity to visit Vienna University of Technology, Professor Rafael L´opez for collaborating me and inviting the author to University of Granada several times. The author also thank to Doctor Rahul Kumar Singh for fruitful discussions and to Doctor Isami Koga for his advices. Finally, he is also grateful to my dissertation committee: Professor Miyuki Koiso, Professor Atsushi Katsuda, Professor Yukio Otsu and Professor Atsufumi Honda for their supports.
This work is supported by Grant-in-Aid for JSPS Fellows Number 15J06677.
Chapter 1
Introduction
A zero mean curvature (ZMC, for short) surface in L3 is a surface whose mean cur- vature is identically zero. In this thesis, we consider ZMC surfaces in Lorentz-Minkowski 3-spaceL3 with the metric of signature (+,+,−). In particular, we focus on the causal characters of them. A surface in L3 is called spacelike, timelike or lightlike at a point on the surface if its induced metric is Riemannian, Lorentzian or degenerate at the con- sidered point, respectively. The label spacelike, timelike or lightlike is called the causal character.
A spacelike ZMC surface and timelike ZMC surface are often called amaximal surface and a timelike minimal surface, respectively. There has been a lot of studies about these classes. For example, there are Weierstrass-Enneper type representation formulas for maximal surfaces [33] and timelike minimal surfaces [35, 41] similar to the case of minimal surfaces in the Euclidean 3-space E3. On the other hand, in contrast to the case of minimal surfaces in E3, it is known that the only complete maximal surfaces are spacelike planes ([11,12]). From this fact, more general classes of surfaces such as maxfaces[55] orgeneralized maximal surfaces[15] have been frequently studied. They are surfaces with singularities. Similarly, timelike minimal surfaces with singularities have been studied and many examples were constructed. Here we use the word singularities in the sense of points where a surface is not an immersion.
On the other hand, these surfaces often can be extended to ZMC surfaces as immersed surfaces inL3 which have more than one causal character. Any such surface has points on which the surface is lightlike, and Klyachin [32] showed that a ZMC C3-immersion X: U −→ L3 of a domain U ⊂ R2 containing a point p ∈ U at which the considered surface is lightlike satisfies either of the following (i) and (ii):
(i) There is a non-degenerate null regular curveγ passing throughX(p) across which the causal character of the surface is changed from spacelike to timelike, where a non-degenerate null regular curve is a regular curve in L3 whose velocity vector field is lightlike and linearly independent of its acceleration vector field.
(ii) There is a lightlike line segment inL3 passing throughX(p) on which the surface is lightlike.
In the case (i), the ZMC surface X has all causal characters (spacelike, timelike and lightlike parts). Moreover, it is known that ifX is of classCω, then the spacelike part Φ and the timelike part Ψ ofX can be written as
Φ(u, v) = γ(u+iv) +γ(u−iv)
2 and Ψ(u, v) = γ(u+v) +γ(u−v)
2 , (1.1)
respectively, and the image of Φ is extended real analytically to the image of Ψ alongγ.
See [23,24,25,19,31,32] for details.
From the viewpoint of maximal surfaces, Fujimori, Kim, Koh, Rossman, Shin, Ume- hara, Yamada and Yang [19] showed that any maxface which has non-degenerate fold singularities [19, Definition 2.13] is extended real analytically to a timelike minimal sur- face. In this extension, the set of fold singularities of the maxface forms a non-degenerate null regular curve on a ZMC surface as the case (i) above. On the other hand, there are no similar results for ZMC surfaces whose lightlike parts are straight lines, which degenerate everywhere as the case (ii) above. However, several ZMC surfaces which have exactly two causal characters and their lightlike parts are straight lines were con- structed in [17,19], and there is a one-parameter family of ZMC surfaces which change their causal characters from spacelike to timelike across a lightlike line constructed in [18]. These surfaces are the only known explicit examples of ZMC surfaces which change their causal characters from spacelike to timelike across a lightlike line. Based on these back grounds, we study not only maximal surfaces and timelike minimal surfaces but also ZMC surfaces which have more than one causal character and ZMC surfaces with lightlike lines.
In Chapter 2, we discuss ZMC surfaces foliated by circles in L3 based on the paper [1]. Classically, in 1867 Riemann [51] constructed non-rotational minimal surfaces in E3 which were foliated by circles and straight lines in parallel planes. They are now called Riemann’s minimal surfaces. In L3, a non-rotational ZMC surface foliated by circles and countably many straight lines in parallel planes is called a ZMC surface of Riemann type (see [36]), where a circle in L3 is the non-linear orbit of the rotational group which fixes pointwise a straight line. In contrast with the case of the Euclidean space, there are three types of circles inL3: Euclidean circles, hyperbolas and parabolas (see Section 2.3.1). Spacelike and timelike ZMC surfaces of Riemann type and, more generally, constant mean curvature surfaces foliated by circles inL3have been studied in [27,36,37,38]. However, these surfaces have more than one causal character in general.
In Chapter 2, we classify all ZMC surfaces including surfaces more than one causal character (Theorems2.4.1,2.4.2and2.4.3) depending on the shapes of circles inL3. We also reveal that there are new ZMC surfaces of Riemann type, we call them ofsingular type, which have not been focused in previous studies. As corollaries, we construct and classify ZMC surfaces of Riemann type which have lightlike lines (Theorems2.5.3,2.5.4 and 2.5.5), and give a new entire ZMC graph foliated by parabolas (Theorem 2.6.1).
In Chapter 3, we discuss a boundary value problem for catenoids in L3 based on the paper [2]. Classically, the catenoid is known as the only axially-symmetric minimal surface inE3except planes, and it appears as a soap film spanning two coaxial circles with the same radius. It is known that if two circles are sufficiently close, there are exactly two catenoids spanning these two circles. Increasing the distance between two circles, there is a critical distance where only one catenoid exists, and after this critical value, the catenoid breaks into two disconnected discs, called the Goldschmidt discontinuous solution [22], see [8,28,47] for example.
In Chapter 3, we consider the same problem in L3 that is the number of catenoids depending on the causal characters of them and the placement of the boundary circles.
As well as the Euclidean case, a catenoid inL3 is defined as a non-planar ZMC surface which is invariant under the linear isometries that fixes pointwise a straight line inL3, and a catenoid in L3 is said to be elliptic, hyperbolic or parabolic if it is foliated by Euclidean circles, hyperbolas or parabolas, which appear as circles inL3. We determine the number of such catenoids spanning given two coaxial circles. Depending on the
shapes of circles and the causal characters of catenoids, we prove that in many cases, situations are very similar to the case of E3, that is, there are at most two catenoids (Theorems 3.3.1, 3.4.1 and 3.5.1). On the other hand, for the case of timelike elliptic catenoids and spacelike hyperbolic catenoids of type II (for the meaning of type II, see Theorem3.2.3), the number of the catenoids goes to infinity as the distance of two circles inL3 increases to infinity (Theorems 3.3.4,3.4.3and also Table3.1).
In Chapter 4, we focus on timelike minimal surfaces based on the preprint [3]. One of the important differences between spacelike surfaces and timelike surfaces is the di- agonalizability of the shape operator, that is, timelike surfaces do not have always real principal curvatures as pointed out in [4, 13, 39, 42], etc. In Chapter 4, we discuss the diagonalizability of the shape operator of timelike minimal surfaces, which is closely related to the sign of the Gaussian curvature (see Section4.2for details).
In 1980, McNertney [44] proved that any timelike minimal surface can be expressed as the sum of two null regular curves (see also Fact4.2.2). From the viewpoint of Bernstein problem for timelike minimal surfaces, Magid [40] and Milnor [45, 46] studied entire timelike minimal graphs and the sign of the Gaussian curvature of them. Milnor [46]
also investigated how to determine the sign of the Gaussian curvature on regular timelike surfaces by using normalized null coordinates (see also Remark 4.3.6). In Section 4.3, we first give a different technique from those of Milnor and Magid to study the Gaussian curvature of regular timelike minimal surfaces by using pseudo-arclength of null regular curves. In Section4.4, we also see that there are some relations between the sign of the Gaussian curvature and symmetry of timelike minimal surfaces (Theorem4.4.3).
On the other hand, timelike minimal surfaces have singularities in general. Therefore we also investigate the behavior of the Gaussian curvature near singularities on timelike minimal surfaces. This study is motivated by the study of ZMC surfaces which have all causal characters. In fact, the timelike minimal surface Ψ with fold singularities (it is also called asfolding singularitiesin [31]) in (1.1) is made by only one null regular curve, and it implies that Ψ has positive Gaussian curvature. Hence we can conclude that the shape operator of any such timelike minimal surface is not diagonalizable overRnear fold singularities. In general, we can expect some relations between the shapes of singularities and the sign of the Gaussian curvature, which corresponds to the diagonalizability of the shape operator.
In Section 4.5, we give some relations among the shapes of singularities and the sign of the Gaussian curvature for a class of timelike minimal surfaces with rank one singularities which is calledminfaces introduced by Takahashi [54] (see Definition4.2.7 and Definition C.2). The notion of minfaces corresponds to the notion of maxfaces:
the class of spacelike maximal surfaces with singular points of rank one. Moreover, Takahashi [54] also gave criteria for cuspidal edges, swallowtails and cuspidal cross caps which appear frequently on minfaces as well as the case of maxfaces ([21,55]) by using a Weierstrass-type representation formula for minfaces. For minfaces, we first prove in Theorem C that the Gaussian curvature near non-degenerate singular points which is not a cuspidal edge is positive or negative if and only if the minface is a front or not a front, respectively (the definitions of non-degenerate singular points and fronts are given in Section 4.5.1). Moreover, in Theorem4.5.12, we show that the sign of the Gaussian curvature near cuspidal edges is characterized by the sign of the singular curvature which was introduced by Saji, Umehara and Yamada [52]. By TheoremsCand 4.5.12, we can determine the diagonalizability of the shape operator near any non-degenerate singular point on a minface.
Chapter 2
Causal characters of zero mean curvature surfaces of Riemann type in Lorentz-Minkowski
3-space
Abstract
A non-rotational zero mean curvature surface in Lorentz-Minkowski 3-space is said to be of Riemann type if it is foliated by circles and at most countably many straight lines in parallel planes. In this chapter, we classify all zero mean curvature surfaces of Riemann type according to their causal characters. As a corollary, we give a new entire zero mean curvature graph of Riemann type and zero mean curvature surfaces containing lightlike lines.
2.1 Introduction
In this chapter, we deal with non-rotational ZMC surfaces foliated by circles and at most countably many straight lines in parallel planes, called ZMC surfaces of Riemann type, and study the causal characters of these surfaces. The notion of circles in L3 is defined by L´opez (see, for example, [36,38]), and circles in L3 are classified into three cases: Euclidean circles in spacelike planes, hyperbolas in timelike planes with lightlike asymptotes, and parabolas in lightlike planes with lightlike axes according to causal characters of planes containing circles (see also Remark 2.3.4). Therefore, the class of ZMC surfaces of Riemann type foliated by these circles is large enough to include some important examples of ZMC surfaces containing lightlike lines.
Spacelike and timelike ZMC surfaces of Riemann type and, more generally, constant mean curvature surfaces foliated by circles in L3 have been studied in [36,37, 38], etc.
L´opez [38] and Honda-Koiso-Tanaka [27] constructed the following parametrizations of ZMC surfaces of Riemann type foliated by circles in spacelike parallel planes which appear as solutions with non-constant radii of a system of ordinary differential equations
Acknowledgement: The author would like to thank Professors Masaaki Umehara and Kotaro Yamada for suggesting the importance of ZMC entire graphs which have all causal characters. He is also grateful to Professor Miyuki Koiso for her many helpful comments.
or ODEs, for short (see Remark2.3.6):
X(r, θ) = (∫ r
r0
as2
∆(s)ds+rcosθ, rsinθ,
∫ r
r0
1
∆(s)ds )
, r ∈I, θ∈R/(2πZ), where ∆(s) := √
a2s4+bs2+ 1, a > 0, b ∈ R and I is a certain interval in R. They studied causal characters of these surfaces. In this chapter, we call surfaces as above general type surfaces. There may be several maximal surfaces, timelike minimal surfaces and surfaces which have more than one causal character in the above class. We classify all ZMC surfaces of Riemann type according to their causal characters. More precisely, we prove the following result (Theorem2.4.1(1)):
Theorem A. Causal characters of the above surface X and the maximal interval of r are determined as follows:
(i) X is spacelike if and only if 2a < b.
(ii) X is timelike if and only if b <−2a and 0< r2 <((−b−√
b2−4a2)/2a2).
(iii) X has both spacelike part and lightlike part and it does not have timelike part if and only ifb= 2a. Moreover, in this case the lightlike part of the surface is a part of a straight line.
(iv) X has both timelike part and lightlike part and it does not have spacelike part if and only if b=−2a and 0< r2<1/a. Moreover, in this case the lightlike part of the surface is a part of a straight line.
(v) The surfaces except those stated above are surfaces which have all causal characters.
Moreover, in the case that b=−2a and r2 >1/a, the lightlike part of the surface consists of a part of a straight line and two non-degenerate null regular curves.
In addition to the above surfaces, we have found the following new ZMC surfaces of Riemann type which appear as solutions with constant radii of a system of ODEs, which we callsingular type surfaces (see Remark2.3.6):
X(u, θ) = (
u+ 1
√acosθ, 1
√asinθ, u )
, (u, θ)∈R×R/(2πZ), a >0,
and prove that these surfaces have timelike part and two lightlike lines (Theorem2.4.1. (2)).
In [38], L´opez also constructed ZMC surfaces foliated by hyperbolas and parabolas which appear as solutions with non-constant radii of systems of ODEs, which we callgeneral type surfaces in this chapter. In addition to general type surfaces, we also have found ZMC surfaces foliated by hyperbolas and parabolas which appear as solutions with con- stant radii of systems of ODEs, and we call these surfaces singular type surfaces. In Theorems 2.4.2 and 2.4.3, we determine causal characters of general and singular type surfaces. In particular, as a corollary of these classification theorems, we obtain the following corollary for ZMC surfaces of Riemann type which have exactly two causal characters.
Corollary B(Corollary2.4.4). If a ZMC surface of Riemann type has exactly two causal characters, then the lightlike part is a part of a straight line.
The class of ZMC surfaces containing lightlike lines has been studied in recent years.
In [17], the authors defined the characteristics of ZMC surfaces along a lightlike line, and categorized these surfaces into the following six classes:
α+,α0I,α0II,α−I ,α−II,α−III,
and constructed some examples belonging to the above classes (see Tables2.1and 2.2).
However, as mentioned above, ZMC surfaces containing lightlike lines have not been sufficiently discussed. There are not so many known examples of ZMC surfaces con- taining lightlike lines. In Section 5, we determine the characteristics of ZMC surfaces of Riemann type containing lightlike lines which appear in CorollaryBabove and the one exceptional case (Theorem2.5.3(1) (iii)) and show that there are one- or two-parameter families of ZMC surfaces of Riemann type which have a lightlike line with characteristics α+,α−I ,α−II andα−III.
In Section 6, we consider ZMC entire graphs which have all causal characters. Calabi [11] showed that there are no maximal entire graphs except for linear functions. However, Kobayashi [33] found ZMC entire graphs which are calledthe helicoid of the second kind and Scherk’s surface of the first kind (see (2.42) and (2.43), respectively). These ZMC entire graphs have all causal characters. After that, in [53], Sergienko and Tkachev produced several interesting ZMC entire graphs which admit some isolated singularities.
In this chapter, we obtain the following new ZMC entire graph of Riemann type which is foliated by parabolas and has all causal characters:
X(u, v) = (
v,−e−4u+u+v2
2,−e−4u−u+v2 2
)
, (u, v)∈R2. (2.1) Most recently, this surface was also constructed independently by Fujimori, Kawakami, Kokubu, Rossman, Umehara and Yamada [20] from a different viewpoint.
The organization of this chapter is as follows. In Section2.2, we first introduce basic notations and local theory of surfaces in L3. The most important notion is the causal characters of a surface (Definition2.2.1). In Section2.3, we review the parametrizations of ZMC surfaces of Riemann type foliated by Euclidean circles, hyperbolas and parabolas, which were constructed mainly by L´opez in [38] and give new ZMC surfaces of Riemann type which we call singular type surfaces (Theorems2.3.5,2.3.7and 2.3.10). In Section 2.4, we determine the causal characters of all ZMC surfaces of Riemann type (Theorems 2.4.1,2.4.2and2.4.3) and prove CorollaryBabove. Moreover we explain the relationship between general type and singular type surfaces. In Section2.5, we review the definition of the characteristic of a ZMC surface containing a lightlike line, which was introduced in [17] and give a useful lemma for calculation of characteristics (Lemma 2.5.2). Then, we determine the characteristics of ZMC surfaces of Riemann type containing a lightlike line (Theorems 2.5.3,2.5.4and 2.5.5). In Section 2.6, we prove that the surface (2.1) is a ZMC entire graph of Riemann type which has all causal characters (Theorem2.6.1).
2.2 Notations and Preliminaries
In this section we give basic notions on differential geometry in Lorentz-Minkowski space. See the references [39], [48] and [57] for details.
We denote byL3 the three-dimensional Lorentz-Minkowski space, that is, the three- dimensional real vector space R3 with the metric
⟨ , ⟩=dx2+dy2−dz2,
where (x, y, z) are the canonical coordinates inR3. InL3, a vectorv has one of the three causal characters: it is spacelike if⟨v, v⟩>0 or v= 0,timelikeif⟨v, v⟩<0 and lightlike if ⟨v, v⟩ = 0 and v ̸= 0. Let Σ be a two-dimensional connected smooth manifold and X: Σ−→L3 be a smooth map which is an immersion on an open dense subsetW ⊂Σ.
Causal characters of a surface are defined as follows.
Definition 2.2.1. A surface X is said to be spacelike,timelike orlightlike on a subset U in W if the induced metric on U is positive definite, non-degenerate with index 1 or degenerate on each tangent plane, respectively. This property of X on U is called the causal characterof X on U.
The causal character of a surface X at each point is determined by the causal char- acter of its normal direction, that is, X is spacelike, timelike or lightlike at a point p if and only if the normal direction is timelike, spacelike or lightlike, respectively.
For a spacelike or timelike immersionX and its unit normal vector fieldν, theshape operator(or theWeingarten map) S and the second fundamental formII are defined as follows:
df(S(Y)) =−∇Yν, II(Y, Z) =⟨∇df(Y)df(Z), ν⟩,
where Y and Z are vector fields on Σ, and ∇ is the Levi-Civita connection on L3. An eigenvalue of S is called a principal curvature of X. The mean curvature H and the Gaussian curvatureK of X are defined as
H =εtr II/2, K =εdetS, where
ε=⟨ν, ν⟩= {
1 ifX is timelike,
−1 ifX is spacelike.
If we take a local coordinate system (U;u, v) on Σ then the induced metric can be written as ds2 =Edu2 + 2F dudv+Gdv2 on U, where E =⟨Xu, Xu⟩, F = ⟨Xu, Xv⟩, G=⟨Xv, Xv⟩, Xu =∂X/∂u and Xv =∂X/∂v. The unit normal vector field ν on U is given by
ν = Xu×Xv
√ϵ(EG−F2), (2.2)
where × stands for the Lorentzian vector product in L3. Moreover, by equation (2.2), the normal vector Xu×Xv satisfies
⟨Xu×Xv, Xu×Xv⟩=−EG+F2.
Hence, the causal character of the surface X is also determined by the determinant of the induced metric ds2 = X∗⟨ , ⟩ on each local coordinate system. Set L = ⟨Xuu, ν⟩, M = ⟨Xuv, ν⟩ and N = ⟨Xvv, ν⟩. Then the mean curvature H with respect to ν is expressed onU by
H =−ϵ 2
EN −2F M +GL EG−F2 .
A surface is called a ZMC surface if its mean curvature vanishes identically on the spacelike part and the timelike part. By the above equation, the equation H = 0 is independent of the causal characters of the surface. Moreover, if the surface is described locally as the graph of a function f on the xy-plane, the equation H = 0 is equivalent to
(1−fy2)fxx+ 2fxfyfxy+ (1−fx2)fyy = 0, (2.3) which is called thezero mean curvature equation. Since the normal direction of the graph z = f(x, y) is given by the vector (fx, fy,1), then the immersion is spacelike, timelike or lightlike at a point p if and only if 1−fx2 −fy2 is positive, negative or zero at p, respectively. These conditions correspond to the conditions that the partial differential equation (2.3) is elliptic, hyperbolic or parabolic, respectively.
2.3 ZMC surfaces of Riemann type
In this section, we define ZMC surfaces of Riemann type in L3 and review the parametrizations of them. The following construction is mainly due to L´opez [38] and Honda-Koiso-Tanaka [27]. Especially, the representation formula (2.5) in Theorem2.3.5 is a special case of [27, Proposition 3], and the representation formulas (2.9), (2.10) in Theorem 2.3.7and the representation formula (1) in Theorem 2.3.10 were constructed in [38, Theorem 1].
2.3.1 Circles in L3
We will give definitions of circles inL3 and rotational (resp. non-rotational) surfaces inL3. Then, by using them, we will define ZMC surfaces of Riemann type.
Definition 2.3.1 ([36, Definition 2]). Let G =G(l) be the identity component of the group of isometries inL3 that fixes pointwise a straight linel. The nonlinearG(l)-orbit of eachp0 ∈L3\l is called acirclein L3.
Definition 2.3.2 ([33, Section 3] or [38, Section 2]). A surface is said to berotational resp.non-rotational) with axis l if the surface is resp. is not) invariant under the group Gthat fixes pointwise the straight linel in the above definition.
Definition 2.3.3. A ZMC surface of Riemann type is a non-rotational ZMC surface which is foliated by circles inL3 and at most countably many straight lines in parallel planes.
Remark 2.3.4. In the above definition, we can remove the assumption that the circles are in parallel planes. In fact, for any ZMC surface foliated by circles inL3, these circles automatically lie in parallel planes (see [36, Theorem 4] and [38, Proposition 2]).
Let{e1, e2, e3}be the canonical base inR3, that is,e1:= (1,0,0), e2:= (0,1,0), e3 :=
(0,0,1). Circles in L3 are classified into the following three types up to isometries inL3 according to causal characters of the fixed straight line.
1. The case that l is timelike. We may assume that l := span{e3}, where ‘span’
denotes the set of linear combinations. Then every element of the connected com- ponent containing the identity of the isometry group which fixes the linelis written as
A(θ) =
cosθ −sinθ 0 sinθ cosθ 0
0 0 1
.
In this case, the circles are Euclidean circles written as
α(θ) =c+rcosθe1+rsinθe2, c∈l, r̸= 0.
Each circle lies in a timelike plane which is parallel to thexy-plane.
2. The case that l is spacelike. We may assume that l := span{e1}. Then every element of the connected component containing the identity of the isometry group which fixes the linel is written as
A(θ) =
1 0 0 0 coshθ sinhθ 0 sinhθ coshθ
.
In this case, the circles are divided into two types of hyperbola:
Type I α(θ) =c+rcoshθe2+rsinhθe3, Type II α(θ) =c+rsinhθe2+rcoshθe3,
where c ∈ l, r ̸= 0. Each circle lies in a timelike plane which is parallel to the yz-plane.
3. The case that l is lightlike: We may assume that l := span{e2+e3}. Then every element of the connected component containing the identity of the isometry group which fixes the linel is written as
A(θ) =
1 θ −θ
−θ 1−θ22 θ22
−θ −θ22 1 +θ22
.
In this case, the circles are parabolas written as α(s) =c+se1+rs2
2 (e2+e3), c̸∈l, r ̸= 0
Each circle lies in a lightlike plane which is parallel to the plane span{e1, e2+e3}. 2.3.2 ZMC surfaces of Riemann type which are foliated by Euclidean
circles
The surfaces foliated by circles in spacelike parallel planes are written as
X(u, θ) = (f(u) +r(u) cosθ, g(u) +r(u) sinθ, u), u∈J, θ∈R/(2πZ), (2.4) wheref,g,r are smooth functions inu defined on some intervalJ satisfying r >0.
Theorem 2.3.5. The surface (2.4) is a ZMC surface of Riemann type if and only if the surface is congruent to the following parametrized surface.
1. General type:
X(r, θ) = (∫ r
r0
as2
∆(s)ds+rcosθ, rsinθ,
∫ r r0
1
∆(s)ds )
, r, r0∈I, θ∈R/(2πZ), (2.5) where ∆(s) :=√
a2s4+bs2+ 1, a >0, b∈R, and I is a certain interval in R.
The conditiona̸= 0is equivalent to the condition that the surface is non-rotational.
The intervalI is determined by the condition that ∆is positive.
2. Singular type:
X(u, θ) = (
u+ 1
√acosθ, 1
√asinθ, u )
, (u, θ)∈R×R/(2πZ), (2.6) where a >0.
Remark 2.3.6. The condition that the surface written as (2.4) is a ZMC surface if and only if, after a suitable translation and rotation around thet-axis, the functionsr,f and g satisfy the following system of ODEs (see the equations (59) and (60) in the proof of [27, Proposition 3]):
f′=ar2, g= 0, a2r4−1−rr′′+r′2 = 0.
In Theorem2.3.5, general type and singular type surfaces correspond to solutions of the system of ODEs above with non-constant r and constant r, respectively. In (2.4), we obtained singular type surfaces by taking a parameter u of the function r instead of takingr as an independent variable.
2.3.3 ZMC surfaces of Riemann type foliated by circles in timelike parallel planes
The surfaces foliated by circles in timelike parallel planes are written as
Type I X(u, θ) = (u, f(u) +r(u) coshθ, g(u) +r(u) sinhθ), (2.7) Type II X(u, θ) = (u, f(u) +r(u) sinhθ, g(u) +r(u) coshθ), (2.8) whereu∈J,v∈R, and J is an open interval on R. r,f andg are functions on J. Theorem 2.3.7. The surfaces (2.7) and (2.8) are ZMC surfaces of Riemann type if and only if the surfaces are congruent to the following parametrized surfaces, respectively:
1. General type:
Type I
X(r, θ) = (∫ r
r0
1
∆(s)ds,
∫ r
r0
as2
∆(s)ds,
∫ r
r0
bs2
∆(s)ds )
+ (0, rcoshθ, rsinhθ),
∆(s) :=√
(a2−b2)s4+ 2δs2−1, (2.9)
where r∈I, θ∈R and δ,a, b∈R, (a, b)̸= (0,0),
Type II X(r, θ) =
(∫ r
r0
1
∆(s)ds,
∫ r
r0
as2
∆(s)ds,
∫ r
r0
bs2
∆(s)ds )
+ (0, rsinhθ, rcoshθ),
∆(s) :=√
(−a2+b2)s4−2δs2+ 1, (2.10) where r ∈ I, θ ∈ R and δ, a, b ∈ R, (a, b) ̸= (0,0).The condition (a, b) ̸= (0,0) is equivalent to the condition that the surface is non-rotational. The intervalI is determined by the condition that∆ is positive.
2. Singular type:
Type I X(u, θ) = u
c (c, a, b) + 1
√c(0,coshθ,sinhθ), (2.11) Type II X(u, θ) = u
c (c, a, b) + 1
√c(0,sinhθ,coshθ), (2.12) where −a2+b2 >0 and c:=√
−a2+b2.
Remark 2.3.8. The surface (2.7) and the surface (2.8) are ZMC surfaces if and only if the functions r,f and g satisfy the following systems of ODEs, respectively (see the equations (24)–(26) and (28)–(30) in the proof of [38, Theorem 1]):
f′ =ar2, g′=br2, 1 + (a2−b2)r4+r′2−rr′′= 0, and
f′ =ar2, g′=br2, 1 + (a2−b2)r4−r′2+rr′′= 0.
In Theorem2.3.7, general type and singular type surfaces correspond to solutions of the systems of ODEs above with non-constant r and constant r, respectively. In (2.7) and (2.8), we have obtained singular type surfaces by taking a parameter u of the function r instead of taking r as an independent variable.
Remark 2.3.9. As well as the parametrizations (2.5) and (2.6), we can normalize the constants a and b in (2.9)–(2.12) as follows. When |a| ̸= |b|, after an isometry in L3 which fixes the axisl= span{e1}and a reparametrization of the surfaceX, we can take a= 0 or b= 0 depending on the relation |a|<|b|or|a|>|b|. For the case |a|=|b|, we can also normalize (a, b) = (1,1).
2.3.4 ZMC surfaces of Riemann type foliated by circles in lightlike parallel planes
The surfaces foliated by circles in lightlike parallel planes are written as X(u, v) =
(
f(u) +v, g(u) +u+ r(u)v2
2 , g(u)−u+r(u)v2 2
)
, (2.13)
where u ∈ J, v ∈ R and f and g are functions on J and r is a function which has no zeros. J is the set of open intervals inRwhere all of the functionsr,f andgin Theorem 2.3.10are well-defined.
Theorem 2.3.10. The surface (2.13) is a ZMC surface of Riemann type if and only if the triple{r, f, g} satisfies one of the following four conditions.
(1) General type:
(i) r(u) = 1
−2u+c, f(u) = 4b
3u3−2bcu2+bc2u, g(u) =
∫ u
0
(b2(s2−cs) +p)(c−2s)2ds, where b∈R\ {0} andc, p∈R.
The condition b ̸= 0 is equivalent to the condition that the surface is non- rotational (see Proposition A.1in Appendix A).
(ii) r(u) =
√ a 2tan{√
2a(u+c)}, f(u) =−
√2b a32
cot{√
2a(u+c)} −2b
a(u+c), g(u) =− b2
√2a52 cot{√
2a(u+c)}+ p 4√
2asin{2√
2a(u+c)} +(p
2− b2
a2)(u+c), where a >0 and b, c, p∈R.
(iii) r(u) =
√ −a
2 tanh{√
−2a(−u+c)}, f(u) =−
√2b a√
−acoth{√
−2a(−u+c)} −2b
a(u+c), g(u) =− b2
a2√
−2acoth{√
−2a(−u+c)}
− p 4√
−2asinh{2√
−2a(−u+c)}+ (b2 a2−p
2)(−u+c), where a <0 and b, c, p∈R.
(2) Singular type:
r(u) =
√ −a
2 , f(u) =−2b
au, g(u) =pe−2√−2au− b2 a2u, where a <0 and b, p∈R.
Remark 2.3.11. The functions r,f and gare the solutions of following ODEs (see the
equations (35)–(38) in the proof of [38, Theorem 1]):
r′ = 2r2+a, (2.14)
r2f′=b, (2.15)
b2
r3+ 4rg′+g′′= 0. (2.16)
(2.14), (2.15) and (2.16) are equivalent to the condition that the surface X is a ZMC surface, and the cases (i), (ii) and (iii) are corresponding to the cases a= 0, a > 0 and a <0 in the equation (2.14). In Theorem2.3.10, general type and singular type surfaces correspond to solutions of the system of ODEs above with non-constantr and constant r, respectively. In (2.13), we have obtained singular type surfaces by taking a parameter u of the functionr instead of takingr as an independent variable.
Remark 2.3.12. In Theorem2.3.10, we used different integral constants from constants in Theorem 1 in [38] so that our expression is more convenient to check the causal characters of surfaces. We also corrected some typographical errors in [38].
2.4 Causal characters of ZMC surfaces of Riemann type
In this section we classify ZMC surfaces of Riemann type constructed by the previous section by their causal characters.
2.4.1 Causal characters of ZMC surfaces of Riemann type foliated by Euclidean circles
Theorem 2.4.1. Causal characters of ZMC surfaces given by (2.5) or (2.6) and the maximal interval ofr are determined as follows.
1. General type:
(i) The surface X is spacelike if and only if2a < b.
(ii) The surface X is timelike if and only if
b <−2a and0< r2 <((−b−√
b2−4a2)/2a2).
(iii) The surface X has both a spacelike part and a lightlike part and it does not have a timelike part if and only ifb= 2a. Moreover, in this case the lightlike part of the surface is a part of a straight line.
(iv) The surface X has both a timelike part and a lightlike part and it does not have a spacelike part if and only if b=−2aand 0< r2 <1/a. Moreover, in this case the lightlike part of the surface is a part of a straight line.
(v) The surfaces except those stated above are surfaces which have all causal char- acters. Moreover, in the case thatb=−2aandr2 >1/a, the lightlike part of the surface consists of a part of a straight line and two non-degenerate null regular curves.
2. Singular type:
Every singular type surface has timelike part and two lightlike lines and it does not have spacelike part.
Proof. First we prove (1). (i) and (ii) are special cases of (II) and (III) of [27, Proposition 3], respectively. Now, we consider the other cases. Since the normal vector of the surface (2.5) is
Xr×Xθ = (
−rcosθ
∆(r) ,−rsinθ
∆(r) ,−r−ar3cosθ
∆(r) )
, the determinant of the metric with respect to the local coordinate system (r, θ) is EG−F2=− r2
∆(r)2
(1 +ar2cosθ+ ∆(r)) (
1−ar2cosθ−∆(r))
. (2.17)
Setξ(r, θ) := 1 +ar2cosθ+ ∆(r) and η(r, θ) := 1−ar2cosθ−∆(r).
First, we determine the condition that a surface X has both a spacelike part and a lightlike part. Since ξ and η are continuous functions on the connected domain I ×R andξ+η = 2 holds, ifξ orη changes its sign,EG−F2 also changes its sign, andξ >0 for some point of the domainI×R/(2πZ). Therefore, the condition thatEG−F2≥0 onI ×Ris equivalent to the following:
ξ≥0 andη≤0 onI×R. (2.18)
The first condition is equivalent to ∆(r)> ar2−1 onI, and the second one is equivalent to ∆(r)> ar2+ 1 onI, that is, (2.18) is equivalent tob≥2a. In this case, ∆ is positive for every r ∈ R, and therefore we obtain I = R. Since the condition b > 2a is the spacelike condition (i), the surface has both a spacelike part and a lightlike part if and only if b = 2a. Next, we determine the lightlike part of the surface. When b = 2a,
∆ =ar2+ 1 and so I =R. In this case we can take r0 = 0 in the equation (2.5). By (2.17),
EG−F2 = r2
∆(r)2
(2 +ar2cosθ+ar2) (
ar2cosθ+ar2) . Sincear2cosθ+ar2 ≥0, the surface has the following lightlike part:
c(r) = (x(r), y(r), z(r)) =X(r, π) = (∫ r
0
as2
as2+ 1ds−r,0,
∫ r
0
1 as2+ 1ds
) , Sincex(r) +z(r) = 0, the lightlike part is a part of a straight line. The proof of (iii) has been completed.
Second, we determine the condition that a surface X has both timelike part and lightlike part. The condition thatEG−F2 ≥0 on I×Ris equivalent to the following:
ξ≥0 andη≥0 onI×R. (2.19)
The first condition is equivalent to ∆(r)≥ar2−1 onI, and the second one is equivalent to 1−ar2 ≥∆(r) onI, that is, (2.19) is equivalent tob≤ −2aandr2 < 1a. By considering the condition ∆ > 0, this is equivalent to b ≤ −2a and r2 < ((−b−√
b2−4a2/2a2).
Since the conditionb <−2ais the timelike condition (ii), the surface has both a timelike part and a lightlike part if and only ifb=−2aand r2 <1/a. In this case we can take r0 = 0 in the equation (2.5). Next, we determine the lightlike part of the surface. In this case, since ∆ = 1−ar2, (2.17) becomes
EG−F2=− r2
∆(r)2
(2 +ar2cosθ−ar2) (
−ar2cosθ+ar2) .
Since 2 +ar2cosθ−ar2 ≥2(1−ar2)>0 and−ar2cosθ+ar2≥0,EG−F2≥0 holds, that is, the surface has timelike part and the following lightlike part:
c(r) = (x(r), y(r), z(r)) =X(r,2π) = (∫ r
0
as2
1−as2ds+r,0,
∫ r
0
1 1−as2ds
) , Sincex(r)−z(r) = 0, the lightlike part is a part of a straight line. The proof of (iv) has been completed.
Third, we determine the condition that a surfaceX has all causal characters. Since a̸= 0,EG−F2is not identically zero. Therefore, there is no lightlike surface. This means that surfaces except those stated above are surfaces which have all causal characters.
Now, assume that the conditionsb=−2aandr2 >1/ahold. Since ∆ =ar2−1, (2.17) becomes
EG−F2 =− r2
∆(r)2
(ar2cosθ+ar2) (
2−ar2cosθ−ar2) .
Note thatξ(r, θ) =ar2cosθ+ar2 ≥0 and the continuous functionη(r, θ) = 2−ar2cosθ− ar2 satisfies
2(1−ar2)≤η(r, θ)≤2.
Since 1− ar2 < 0, EG −F2 changes its sign. Therefore, the surface changes its causal characters. Moreover, the surface is lightlike on the domain which satisfies ei- therξ(r, θ) = 0, that is,
θ= (2k+ 1)π, k∈Z,
orη(r, θ) = 0. When the case that ξ(r, θ) = 0, the lightlike part is a part of a straight line as in the case (iv), and then the surface is timelike along the straight line. Next we consider the case that η(r, θ) = 0. Since rcosθ= (2−ar2)/ar, the lightlike part is written as the following two curves:
c(r) =X(r, θ(r))
=
∫ r
r0
as2
as2−1ds+2−ar2 ar ,±r
vu ut1−
(2−ar2 ar2
)2 ,
∫ r
r0
1 as2−1ds
,
and these curves are not straight lines. The proof of (v) and so the proof of (1) have been completed.
Now we prove (2). By a straightforward computation, the determinant of the in- duced metric of the surface (2.6) with respect to the local coordinate system (u, θ) is
−(1/a) sin2θ. Therefore, the surface has a timelike part and the following two lightlike lines:
c+(u) =X(u,0) =u(1,0,1) + 1
√a(1,0,0), c−(u) =X(u, π) =u(1,0,1)− 1
√a(1,0,0).
At the end of this subsection, it should be noted that there is a relationship between singular type surfaces and the asymptotic behaviors of some general type surfaces. If
we consider a ZMC surface of Riemann type which belongs to the class (iv) in Theorem 2.4.1, this surface has the following implicit form:
(x−z+r(t))2+y2 =r(t)2, r(t) = 1
√atanh (√ az).
By taking limitsr → ±(1/√
a) on the surface (which correspond tot→ ±∞), we obtain (
x−z± 1
√a )2
+y2 = 1 a.
These surfaces are nothing but the singular type surfaces (2.6) up to a translation inL3 and Figures 4 and 5 in Section 5.2 are pictures of the above two surfaces.
2.4.2 Causal characters of ZMC surfaces of Riemann type foliated by hyperbolas
Theorem 2.4.2. Causal characters of ZMC surfaces of Riemann type which are given by (2.9), (2.10), (2.11) or (2.12) and the maximal interval of r are determined as follows.
(1) General type:
Type I Timelike on whole domain.
Type II
(i) There is no Type II spacelike surface on I×R.
(ii) The surface X is timelike if and only if
|b| ≥ |a|, and if we define c := √
−a2+b2, then one of the following three conditions holds.
(ii-1) In the case when a < b,
|δ|< c, 0≤c≤ −δ or ‘0< c≤δ and r2> δ+√ δ2−c2 c2 ’.
(ii-2) In the case when a=b, a=b >0 andδ ≤0.
(ii-3) In the case when a > b, 0< c < δ and r2> δ+√
δ2−c2 c2 .
(iii) There is no Type II surface which has both a spacelike part and a lightlike part and it does not have a timelike part.
(iv) The surface X has both a timelike part and a lightlike part and it does not have a spacelike part if and only if|b|>|a|, and if we define c:=√
−a2+b2, then one of the following two conditions holds.
(iv-1) In the case when a < b, 0< c=δ and 0< r2< 1
c. (iv-2) In the case when a > b,
0< c=δ and r2> 1 c.
Moreover in this case, the lightlike part of the surface is a part of a straight line.
(v) The Type II surfaces except those stated above are surfaces which have all causal characters.
(2) Singular type:
Type I Timelike on whole domain.
Type II The surface has timelike part and a lightlike line and it does not have spacelike part.
Proof. First we prove (1). The Type I surfaceXis written as (2.9). By a straightforward calculation, we get
Xr×Xθ =
(ar3coshθ
∆(r) +r− br3sinhθ
∆(r) ,−rcoshθ
∆(r) ,−rsinhθ
∆(r) )
, and then
⟨Xr×Xθ,Xr×Xθ⟩=
(ar3coshθ
∆(r) +r− br3sinhθ
∆(r) )2
+ ( r
∆(r) )2
>0.
Therefore, the normal vector of the surface is spacelike, which means that the surface is timelike on whole domain.
The Type II surface Xis written as (2.10). By a straightforward calculation, we get Xr×Xθ =
(ar3sinhθ
∆(r) −r−br3coshθ
∆(r) ,−rsinhθ
∆(r) ,−rcoshθ
∆(r) )
, and then
⟨Xr×Xθ, Xr×Xθ⟩=
(ar3sinhθ
∆(r) −r− br3coshθ
∆(r) )2
− ( r
∆(r) )2
= ( r
∆(r) )2{(
ar2sinhθ−∆(r)−br2coshθ)2
−1 }
= ( r
∆(r) )2
(ar2sinhθ−br2coshθ−∆(r) + 1) (ar2sinhθ−br2coshθ−∆(r)−1)
. If we define a new parameters:=eθ, then
ar2sinhθ−br2coshθ−∆(r) + 1
= 1 2s
{(a−b)r2s2+ 2(−∆(r) + 1)s−(a+b)r2} and ar2sinhθ−br2coshθ−∆(r)−1
= 1 2s
{(a−b)r2s2+ 2(−∆(r)−1)s−(a+b)r2} .
Therefore, if we define ϕ := ϕ(r, s) = (a−b)r2s2 + 2(−∆(r) + 1)s−(a+b)r2 and ψ:=ψ(r, s) = (a−b)r2s2+ 2(−∆(r)−1)s−(a+b)r2, then
EG−F2=−⟨Xr×Xθ, Xr×Xθ⟩=− ( r
2s∆(r) )2
ϕψ. (2.20)