卒業論文 2006 年度 ( 平成 18 年度 )
無線センサデバイスを用いた実空間指向ゲームの 開発支援ミドルウェアの構築
指導教員
慶應義塾大学 環境情報学部
徳田 英幸 村井 純 楠本 博之
中村 修 高汐 一紀 湧川 隆次
慶應義塾大学 環境情報学部
渡邊 裕一郎
卒業論文要旨 2006 年度 ( 平成 18 年度 )
無線センサデバイスを用いた
実空間指向ゲームの開発支援ミドルウェアの構築
近年、ユーザの動作を用いた実空間指向ゲームが注目を集めている。特に小型軽量 の無線センサデバイスをユーザの身体に装着することによって実空間指向ゲームを実 現する WWSD (Wearable Wireless Sensor Device) 手法は、ユーザの動作制限が少な いという特徴を有する。しかし、無線センサデバイスを実空間指向ゲームの開発は、
センサからの情報取得やコンテキスト情報の解析が困難であるため、現状では無線セ ンサデバイスに関する多くの知識を必要とする。
本研究では、実空間の様々な無線センサデバイスを利用した実空間指向ゲームの開 発を支援するミドルウェアシステム WearMiddle (Wearable Middleware) を提案する。
WearMiddle はユーザに装着された無線センサデバイスでコンテキストを解析し、実
空間指向ゲームに特化したコンテキスト定義リストを保持する。そのため、ゲーム開 発者が自らコンテキスト解析の手法を考案する必要なく、ユーザコンテキスト情報を ゲームシステムに反映できる。ゲーム開発者は WearMiddle を使用することで、無線 センサデバイスのハードウェアやネットワークに関する知識を必要とせずに、実空間 指向ゲームの開発が可能となる。
慶應義塾大学 環境情報学部
渡邊 裕一郎
Abstract of Bachelor’s Thesis
WearMiddle: A Construction of Middleware which Supports to Develop Real-World Game using
Wireless Sensor Devices
Recently, the research and the development of the context analysis system with wireless sensor devices have attracted attention. There,it is general method to use the technique that constructs the network with arranging a small, cheap wireless sensor devices in various places of a real space and from the sensor, collects data of the state of the environment, the person and the thing in a real space automatically then analyzes these data as context information.
However, there is another method uising advantage of smallness of the wireless sensor devices.with arranging these wireless sensor devices directly in the human body, we can acquire the data that sticks to the person and analyze the context. It can be said that this technique is useful for the application development that needs the user interactions, mainly in the field of the game development. Especially, in the real space game operated by the user action,Technologies such as image recognitions and infrared sensors with the camera are used for the Sensing of user’s free movements. The wireless sensor devices can be used to develop the real space game as well as these, too.
However, there is a problem when the wireless sensor devices are used for the game development.the problem is that it is difficult to develop the game considering of acquisition of the information from the sensor and the analysis of context information if you are not specialist on the sensor devices and the network. this is because an analytical technique and a definition of the context when the environment of a real space is analyzed from the sensor data are more complex than the case to use other technologies. So,the development of the game with wireless sensor devices were the beyond our capacities besides the specialist of the wireless sensor device under the present situation.
In this thesis, I propose Middleware system called as Wearable Middleware that supports development of game using a variety of SenSynge information on real space.
WearMiddle can maintain the context definition list that specializes in the game by using an analytical technique of the context to which the user is required to install the wireless sensor device in the body. And User context information can be reflected in the game program and for the game developer it is unnecessary to design the technique of the context analysis.
with using WearMiddle, it becomes possible for game developers to develop the
real space game without knowledge on the hardware side and the network side of the
wireless sensor devices.
Yuichiro Watanabe
Faculty of Environmental Information
Keio University
目 次
第 1 章 序論 1
1.1 研究動機 . . . . 1
1.2 本研究の目的 . . . . 2
1.3 本論文の構成 . . . . 2
第 2 章 研究背景 4 2.1 実空間指向ゲームの概要 . . . . 4
2.2 使用デバイスによる実空間指向ゲームの分類 . . . . 4
2.2.1 GPS . . . . 4
2.2.2 カメラ . . . . 5
2.2.3 ウェアラブルコンピュータ . . . . 6
2.2.4 無線センサデバイス . . . . 8
2.3 無線センサデバイスの概要 . . . . 8
2.3.1 概要 . . . . 8
2.3.2 必須要件 . . . . 9
2.3.3 構成要素 . . . . 10
2.3.4 無線センサデバイス例 . . . . 11
2.4 本章のまとめ . . . . 13
第 3 章 問題提起 14 3.1 実空間指向ゲームの機能要件 . . . . 14
3.2 既存実空間指向ゲームの問題点の比較 . . . . 15
3.2.1 GPS . . . . 15
3.2.2 カメラ . . . . 15
3.2.3 ウェアラブルコンピュータ . . . . 16
3.2.4 無線センサデバイス . . . . 16
3.3 WWSD 手法と問題点 . . . . 16
3.3.1 WWSD 手法の提案 . . . . 16
3.3.2 WWSD 手法を用いたプロトタイプの実装 . . . . 17
3.3.3 WWSD 方式の問題点 . . . . 18
3.4 WearMiddle の提案 . . . . 21
3.4.1 コンテキスト定義における問題解決 . . . . 21
3.4.2 コンテキスト解析における問題解決 . . . . 21
3.5 センサネットワークにおけるミドルウェアの要件 . . . . 21
3.6 関連研究 . . . . 23
3.7 本章のまとめ . . . . 24
第 4 章 WearMiddle の設計 26 4.1 WearMiddle の概要 . . . . 26
4.2 想定環境 . . . . 26
4.3 機能要件 . . . . 27
4.3.1 全体構成 . . . . 28
4.4 モジュールの設計 . . . . 29
4.4.1 コンテキスト管理表 . . . . 29
4.4.2 コンテキストエディタ機能 . . . . 29
4.4.3 センサデータ統一機能 . . . . 31
4.4.4 コンテキスト解析機能 . . . . 33
4.4.5 動作手順 . . . . 34
4.5 本章のまとめ . . . . 34
第 5 章 WearMiddle の実装 35 5.1 実装の概要 . . . . 35
5.1.1 実装環境 . . . . 35
5.1.2 事前実装 . . . . 35
5.2 モジュールの実装 . . . . 36
5.2.1 コンテキスト管理表 . . . . 36
5.2.2 コンテキストエディタ機能 . . . . 37
5.2.3 センサデータ統一機能 . . . . 38
5.2.4 コンテキスト解析機能 . . . . 40
5.3 本章のまとめ . . . . 41
第 6 章 WearMiddle の評価 42 6.1 ECN-Slider の実装 . . . . 42
6.2 評価概要 . . . . 43
6.3 定量的評価 . . . . 43
6.4 定性的評価 . . . . 44
6.4.1 WWSD 手法の実空間ゲームとの比較 . . . . 44
6.5 本章のまとめ . . . . 45
第 7 章 結論 47 7.1 今後の課題 . . . . 47
7.2 まとめ . . . . 48
図 目 次
1.1 次世代ゲーム機の初動 1 週間の売上台数の比較 (データ元:週刊ファミ通
No.941 [8]) . . . . 1
2.1 Space Race における、GPS を用いたシステム構成 (文献 [7] より引用) . 5 2.2 EyeToy カメラセットアップ画像 ([22] より引用) . . . . 6
2.3 EyeToy カメラ対応実空間指向ゲームスクリーンショット ([22] より引用) 6 2.4 Human Pacman に用いられたウェラブルコンピューター (文献 [4] より 引用) . . . . 7
2.5 Human Pacman のゲーム画面 (文献 [4] より引用) . . . . 7
2.6 モンスター捕獲ネット (文献 [29] より引用) . . . . 8
2.7 MICA MOTE(出典:Crossbow 社ウェブページ [5]) . . . . 12
2.8 uPart とセンサ . . . . 12
3.1 UBI-SHOOT!!-ver1.0- システム図 . . . . 18
3.2 UBI-SHOOT!!-ver1.0-:「パワーチャージ」から「攻撃」へ変化時のアク ション(左:「パワーチャージ」 右:「攻撃」) . . . . 19
3.3 UBI-SHOOT!!-ver1.0-:「パワーチャージ」から「攻撃」へ変化時のスク リーンショット(左:「パワーチャージ」 右:「攻撃」が敵機に命中した 瞬間) . . . . 19
3.4 WWSD 方式における開発者の開発ステップの流れ . . . . 20
4.1 WearMiddle の全体構成図 . . . . 29
4.2 コンテキストエディタ機能のモジュール図 . . . . 30
4.3 センサデータ統一機能におけるモジュール図 . . . . 31
4.4 uPart の送信データの構造 . . . . 32
4.5 uPart の送信データの concom-u の中身 . . . . 32
4.6 MICA MOTE の送信データの構造 . . . . 32
4.7 コンテキスト解析機能におけるモジュール図 . . . . 33
5.1 uPart Sensor Configuration ページ ([24] より引用) . . . . 36
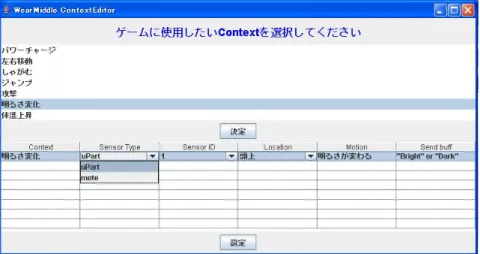
5.2 Context Editor 起動時クリーンショット . . . . 37
5.3 Context Editor コンテキスト選択時スクリーンショット . . . . 39
6.1 ECN-Slider スクリーンショット . . . . 42
6.2 無線センサデバイスの使用個数別処理遅延時間 (1 種類) . . . . 44
表 目 次
2.1 無線センサデバイスの代表的な通信規格 (出典:Sensor Network Technol-
ogy [21]) . . . . 10
2.2 uPart の構成 . . . . 13
3.1 既存実空間指向ゲームの問題点の比較 . . . . 15
3.2 UBI-SHOOT!!-ver1.0-におけるコンテキスト定義表 . . . . 18
4.1 コンテキスト管理表格納データ構成 . . . . 30
5.1 MICAz MOTE センサデータ送信頻度変更擬似コード . . . . 35
5.2 コンテキスト管理表 . . . . 36
5.3 センサデータ統一モジュール擬似コード (Mica Mote 用) . . . . 39
5.4 センサデータ解析モジュール擬似コードの一部 . . . . 40
6.1 他 WWSD 手法実空間指向ゲームとの比較評価 . . . . 45
第 1 章 序論
1.1 研究動機
近年、任天堂 [16] から発売されたゲーム機「Wii」[18] に代表されるような、実空間 指向のゲームが提案されている。実空間指向ゲームとはユーザの動作や行動がそのま まゲームの進行に反映されるゲームのことであり、ユーザはより直感的にゲームを遊 びとして体験できる。昨今のゲームコンテンツは、Computer Graphics (CG) や映像 をコンテンツの特有性として全面に出したものが多く、毎日何時間もゲームをするよ うなユーザ向けに高難易度化・シリーズ化する事が一般的となり、初心者やゲームを 趣味程度に遊ぶようなユーザには敷居が高かった。しかし最近は Wii に代表される実 空間指向ゲームが台頭し、単純で直感的なゲーム性が好評を博している。このことは、
図 1.1 が示すように、Wii の初動一週間の売上台数を PS3[23]、XBOX360[13] といった 次世代ゲーム機と比較してみても明らかである。
図 1.1: 次世代ゲーム機の初動 1 週間の売上台数の比較 (データ元:週刊ファミ通 No.941 [8])
実空間指向ゲームには、実空間の情報を取得するために様々なセンシング技術が利
用されている。例として、カメラによる画像認識や GPS (Global Positioning System)
センサ等が挙げられる。また、ユビキタスモンスター [30][28][29] に代表されるように、
無線センサデバイスを網などの物に取り付け、実空間指向ゲームに利用するという試 みもある。
本研究の最初の動機は、無線センサデバイスを人に直接装着し、センサデータから ユーザの行動や周辺環境を「コンテキスト」として抽象化し、実空間指向ゲームに使用 するというものだった。無線センサデバイスを用いた実空間指向ゲームは、他のセンサ デバイスを用いた実空間指向ゲームと比べて、ユーザの動作範囲や実空間指向ゲーム 中の仮想空間と実空間との相互作用性にいて優れており、今後の実空間指向ゲームの 開発において重要な技術となりうる。そしてそのプロトタイプとして、実空間指向ゲー ムである「UBI-SHOOT!! -ver1.0-」[26] を提案した。ユーザの移動、パワーチャージ、
攻撃という三種類のコンテキストの解析を行い、シューティングゲームに反映した。
しかし、UBI-SHOOT!!-ver1.0-の開発において、無線センサデバイスの装着部位や、
コンテキストの定義、解析手法は常に開発者の試行錯誤が必要であり、ユビキタスモ ンスターを始めとする無線センサデバイスを用いた他ゲームの開発例でも同様であっ た。センサデータのみで様々なコンテキストを解析するためには、用途に応じて最適 なセンサを用いる必要があるため、何種類かの無線センサデバイスを使用することに なる。無線センサデバイスの種類によって機能や性能は異なるため、様々なセンサを 1つの実空間指向ゲームが利用するためには、そのような無線センサデバイスの種類 や機能の違いを吸収するための、ゲームに特化したミドルウェアの存在が必要となる。
1.2 本研究の目的
本研究の目的は、無線センサデバイスを用いた実空間指向ゲームの開発の敷居を低く するためのミドルウェアの構築である。そこで、本研究では、WearMiddle (Wearable Middleware) を提案する。
従来の実空間指向ゲームの開発は、1.1 で述べたような開発者の試行錯誤によって行 われるものであった。WearMiddle は、ゲームに最低限必要なコンテキストと、コンテ キストの解析方法を開発者に提供する。そして、ゲーム開発者は WearMiddle から送 られてくるコンテキストデータのみをゲームプログラムに組み込み、実空間指向ゲー ムの開発できる。
本機構により、ゲーム開発者は実空間指向ゲームの開発において無線センサデバイ スに関する試行錯誤を行う必要がなくなり、実空間指向ゲームの開発にかかる期間の 減少につながる。
1.3 本論文の構成
本論文は全 8 章から構成される。第 1 章では、本研究の動機及び目的・意義につい
て述べた。第 2 章では、本研究の背景である無線センサデバイスの概要、実空間指向
ゲームの概要についてを説明し、それぞれの関連研究を挙げる。次の第 3 章では、ま
ず無線センサデバイスを用いた実空間指向ゲームの開発の優位性について論じた後、
従来の手法での問題点を指摘する。そしてその問題点の解決策として、第 4 章で無線
センサデバイスを用いた実空間指向ゲームの開発を支援する機構である WearMiddle
の提案を行い、第 5 章でその設計方法を説明する。次の 6 章では前章の設計に基づき
行った本機構の実装の詳細について説明する。 7 章にて WearMiddle を用いて開発した
コンテンツの定性的評価と、WearMoiddle の定量的評価を行い、本機構を用いた実空
間指向ゲームの開発の有用性を実証する。最後に 8 章において本論文をまとめ、今後
の課題について展望する。
第 2 章 研究背景
本章では、本研究の背景を述べる。まず本研究の対象である実空間指向ゲームにつ いて概説し、その既存研究・実装例を示す。また、本研究で用いる基盤技術である無 線センサデバイスについて概説する。
2.1 実空間指向ゲームの概要
本節では、本研究の対象アプリケーションである実空間指向ゲームの概要について 述べ、この分野においての様々なセンシング技術の有用性を述べる。なお、本節より ゲームで遊ぶ人をプレイヤと定義する。
実空間指向ゲームは、プレイヤが実空間で起こした様々なイベント(歩く、ジャン プする等)が、仮想空間において反映されるゲームの総称である。専用のコントロー ラは用いず、プレイヤ自身の感覚的な操作を行えることが特徴である。身近な例とし て、ゲーム機の Wii に対応しているゲームソフトが挙げられる。Wii 対応のゲームソ フトである「ゼルダの伝説 トワイライトプリンセス 」[17] では、プレイヤがリモコ ン型のコントローラを振り下ろすことで、 「攻撃」のアクションをゲームキャラクタが 行う。また右手のコントローラを空中に振り上げ、左手のコントローラをリールを巻 くように動かすことで、ゲームキャラクタが「釣り」を行うことも可能である。
このように、実空間上のプレイヤがあたかも仮想空間上に自らがいるような没入感 を感じられるという点が、実空間指向ゲームの特徴である。
2.2 使用デバイスによる実空間指向ゲームの分類
実空間指向のゲームでは、実空間でのプレイヤのコンテキストを得るために、様々 なセンシング技術が用いられている。本節では、実空間指向ゲームに用いられる使用 デバイスの観点から、既存研究および実装例を4つに分類する。特に本研究で用いる 無線センサデバイスについては、概要や必須要件、構成要素やデバイス例についても 詳しく述べる。
2.2.1 GPS
GPS (Global Positioning System) は、地球上の現在位置を調べるための衛星測位シ
ステムであり、実空間指向ゲームにおいてユーザの位置を取得するために利用される。
GPS を用いた実空間指向ゲームの研究例として、Space Race[7] が挙げられる。Space Race において、プレイヤは実空間上を、GPS を搭載した携帯電話を所持して移動す る。ゲーム内はプレイヤとオンライン上のナビゲータに分かれ、プレイヤはナビゲー タの指示に従いつつ実空間を移動し、実空間指向ゲーム内に繰り広げられるの仮想空 間上に隠された目的物を探す。
図 2.1 に Space Race のシステム構成を示す。
図 2.1: Space Race における、GPS を用いたシステム構成 (文献 [7] より引用) プレイヤの実空間内での位置情報は、GPS を搭載した携帯電話からゲームサーバへ と送信され、ナビゲータが閲覧できるナビゲータマップに表示される。また、プレイ ヤは目的物の発見を、プレイヤが閲覧できるアドミンツールによって把握できる。
また Newt Games 社のモギィ アイテムハント [15] も、GPS を使った実空間指向ゲー ムの一例である。モギィ アイテムハントは、プレイヤが実際に東京のあらゆる場所を 巡り、携帯電話に搭載された GPS を使って仮想的なアイテムを探す実空間指向ゲーム である。花や果物、生物などのアイテムが東京中に隠されており、プレイヤの携帯電話 に表示される街の地図にその位置が示される。プレイヤ達はチームを組んで街をくま なく探し、様々なアイテムを組み合わせたコレクションの作業を目的としている。ま たアイテムを交換するために、自分達とは違うコレクションを集めている他のチーム のプレイヤの探索も行う。
2.2.2 カメラ
カメラは、カメラ画像の情報からプレイヤのコンテキストを認識できるため、実空間 指向ゲームにしばし使用される。カメラによる画像認識技術を用いた実空間指向ゲー ムの実装例として、まず AceSpeeder2[19] が挙げられる。
AceSpeeder2 は、反重力空間を高速で走るレーシングゲームである。このゲーム
は、プレイヤの頭部背面に設置したカメラの画像から、プレイヤの体の傾き具合を
GPUVision[2] を用いて判別する。図の左側が元のカメラ映像であり、プレイヤは、ゲー ム上の乗り物を体の動きで操作できる。
また、SCEI (Sony Computer Entertainment Inc) から発売されている EyeToy カメ ラ [22] というデバイスも、カメラによる画像認識技術を用いたものである。EyeToy カ メラは、同じく SCEI から発売されているゲーム機である PS2 (Play Station 2)??専 用のカメラデバイスである。実空間指向ゲームを操作する際に PS2 専用のコントロー ラで操作するのではなく、EyeToy カメラを介し、テレビに写るプレイヤ自身をコント ローラとして操作する。
図 2.2: EyeToy カメラセットアップ画像
([22] より引用) 図 2.3: EyeToy カメラ対応実空間指向ゲー
ムスクリーンショット ([22] より引用)
EyeToy は、カメラに映る自分の姿と、図 2.2 内の白い枠線との大きさが同じになる
ようにカメラのピントやプレイヤの位置を微調整する。そして、図 2.3 のように画面 に映し出されたプレイヤ自身のカメラ画像を見ながら、プレイヤ自身が動いて遊ぶこ とができる。
2.2.3 ウェアラブルコンピュータ
最も理想的なコンピュータの携帯手法として、コンピュータを着るというアプロー チであるウェアラブルコンピューティングの研究は、携帯電話、PDA の進歩に見られ るコンピュータの小型化に伴い近年盛んになっている。
ウェアラブルコンピュータを用いた実空間指向ゲームの例として、 Human Pacman[4]
が挙げられる。Human Pacman においてプレイヤは HMD (Head Mounted Display) を含めた様々なコンピュータを装着し、Pacman と Ghost に分かれ実空間を自由に移 動する (図 2.4 参照)。Pacman チームは HMD を通して見える仮想空間上における目 標物の収集と、Ghost による Packman への接触がゲームの目的である (図 2.5 参照)。
両チームのプレイヤは、実空間上ではお互いを判別不可能であるため、両方のプレイ
ヤを判別できるオンライン上の Helper が、その位置を伝達する。実空間内でのプレ
イヤ同士の直接的なコミュニケーション効果を得るため,Human Pacman では相手に
タッチするという要素を取り入れている.
図 2.4: Human Pacman に用いられたウェラブルコンピューター (文献 [4] より引用)
図 2.5: Human Pacman のゲーム画面 (文献 [4] より引用)
プレイヤは、Human Pacman において図 2.4 のような GPS センサの他にもカメラや 無線モジュール、バッテリー等を装着する。これにより、複数のセンシング技術を同 時に使用しながらプレイヤが実空間を広範囲で移動できる。
2.2.4 無線センサデバイス
ユビキタスコンピューティングにおいて、実空間の人や環境の情報を収集する用途 で用いられている無線センサデバイスというデバイスがある。無線センサデバイスは、
様々なセンサデータを無線技術で送信可能なデバイスであり、実空間指向ゲームに利 用されている研究例もある。東京大学の川西氏らが開発したユビキタスモンスター [30][28][29] がその例である。
ユビキタスモンスターは、実空間と仮想空間の相互作用で動的に変化し続ける世界 を舞台としたモンスター収集ゲームである [29]。プレイヤは実空間中のある「エリア」
へ接近し、そのエリアに対応するゲーム中の「フィールド」に生息するモンスターを 実空間を動き回りながら収集してゆく。その実装の中で、図 2.6 のような無線センサ デバイスを取り付けた網(モンスター捕獲ネット)を用い、無線センサデバイスの加 速度センサのデータから、 「網を振る=モンスターの捕獲」というコンテキストの定義 をしている。
図 2.6: モンスター捕獲ネット (文献 [29] より引用)
2.3 無線センサデバイスの概要
本節では 2.2.4 で触れた無線センサデバイスの概要について述べる。まずユビキタス
コンピューティングにおけるネットワークセンシングの概要を論じた後、そのプラッ トフォームである無線センサデバイスの概要について説明する。
2.3.1 概要
近年、我々を取り巻くネットワーク環境は、あらゆるものがネットワーク接続される
「ユビキタスコンピューティング(UbiquitousComputing)[11]」環境へと変化を遂げ
ようとしている。ユビキタスコンピューティング環境では,我々の生活する実空間と コンピュータネットワークの作り出す仮想空間が密に相互接続されることにより,実 空間中で起こるあらゆる出来事を仮想空間で把握でき、また仮想空間での処理結果を 実空間に反映できる。
このような実空間とのインタラクションを特徴とするユビキタスコンピューティン グにおいて、実空間の情報を取得できるセンシング技術は必要不可欠である [21]。そ して特に、センシングシステムとネットワークの結合はコンピュータネットワークが 作りだす仮想空間と実空間を密に連携させることを可能とする。SSLab(Smart Space
Lab.)[25] では、環境に埋め込まれた様々なセンサによるネットワークで構成された知
的空間 (Smart Space) とユーザのインタラクションに基づく、次世代コラボレーショ
ンスペースの実現を果たしている。
ユビキタスコンピューティングを構築するセンサネットワークにおいて必要不可欠 なものが、センシングデータを無線で送信、ないしは受信が可能な「無線センサデバイ ス」である。無線センサデバイスは、 「スマートダスト (Smart Dust)[10]」のプロジェ クトを発端として研究者の注目を集め、より環境に組み込み易いものへとなっていた。
スマートダストは「無数の無線センサデバイス(スマートダスト)が空中を漂いなが ら、互いに通信し、実空間の情報を集める」というセンサネットワークの究極の姿を 提案している。
2.3.2 必須要件
スマートダストのコンセプトを実現させるために、無線センサデバイスには主に以 下の4つの要件が必須である。
• 小型・軽量化
実空間の中のありとあらゆる物や場所に配置をするため、またより多くの数を空 間に散りばめるためには、デバイスはできる限り小さく軽い方が望ましい。
• 安価化
実空間にデバイスを散りばめるには多くの数を必要とするため、単価は安い方が 望ましい。
• 省電力化
実空間で長時間稼働が必要になるため、電力消費ができるだけ少ない方が好まし い。またデバイスの小型・軽量化の為にも小さい電池でも長時間稼働できると望 ましい。
• 耐故障性の強化
長時間に渡りデバイスを放置する必要があるため、天候や事故が原因で故障し
てしまうこともしばしある。そのためなるべく対故障性に優れている方が望ま
しい。
2.3.3 構成要素
一般的に無線センサデバイスは、通信モジュール・マイクロプロセッサ・センサ基 盤・電源の4つの要素で構成される。
• 通信規格
無線センサデバイスに用いられている代表的な通信規格は、表 2.1 の通りである。
表 2.1: 無線センサデバイスの代表的な通信規格 (出典:Sensor Network Technology [21])
デバイス RFM TR ZigBee Bluetooth
周波数帯 300〜900MHz 帯 2.4GHz 帯 2.4GHz 帯
規格 微弱無線 IEEE802.15.4 IEEE802.15.1
最大チャネル数 単チャネル 16 チャネル 32 チャネル 最高通信速度 111.5kbps 250kbps 1Mbps 最大通信距離 約 10m 約 30m 約 10m
変調方式 ASK/OOK DSSS FHSS
現在、無線センサデバイスに用いられているモジュールは、通信速度が数十 kbps
〜百数十 kbps 程度の狭帯域なものが多いが、近年は、ZigBee(IEEE802.15.4)[3]
をセンサネットワーク用の無線通信方式として利用する動きが見られる。 ZigBee は Bluetooth や無線 LAN と同じ 2.4GHz 帯の電波を使っており、省電力性に優 れているため、無線センサデバイスに用いる通信規格に適している。
• マイクロプロセッサ
無線センサデバイスに用いられるマイクロプロセッサは、8 ビットあるいは 16 ビット程度の処理能力で、数 MHz 程度の動作周波数の組み込み用マイコンがよ く利用される。その理由としては無線センサデバイスのプロセッサの主な役割 は、センサからデータ取得とデータの目的地までの配送のみであり、性能をそれ ほど必要としないためである。
マイクロプロセッサとして最もよく用いられるのは、Microchip 社の PIC マイコ ンと Atmel 社の AVR マイコンが挙げられる。
• センサ基盤
無線センサデバイスで用いられるセンサ基盤には、組み込み型と取り付け型があ る。前者は、センサ基盤がマイクロプロセッサと同じ基盤上に組み込まれている ため、センサの種類はある程度限られている。代表的なものに、MillenialNet 社
の i-Bean[14] がある。後者は、センサ基盤がマイクロプロセッサ基盤上にあるコ
ネクタピンへ取り付けが可能であり、多くのセンサが用意されている。代表的な ものは Crossbow 社 [5] の MTS310 というセンサ基盤で、温度・照度・音・2軸 加速度・2軸磁気センサがついている。
• 電源
無線センサデバイスは空間のあらゆる場所に偏在させる用途が多く、場合によっ ては電気の通らないような場所にも配置させることがある。したがって、電源は 外部電源ではなくバッテリ電源を用いる。バッテリ電源には、乾電池を用いる場 合とボタン電池を用いる場合がある。
2.3.4 無線センサデバイス例
本節では無線センサデバイスの中で特に、本研究で用いる MICA MOTE と uPart と いう端末について概説する。
MICA MOTE
MICA MOTE はスマートダストの流れを汲み込み、早い段階からハードウェアとソ
フトウェアの開発が行われ、最も早く市販化がされたデバイスである。最初に発売さ
れた MICA MOTE は、マイクロプロセッサに 8 ビットの AVR マイコンを搭載、無線
モジュールには RFM 社の TR1000(表 2.1 参照)が用いられた。そして単3乾電池2 本によって構成されるボードを基本とし、その上にコネクタを介して各種センサが搭 載されたボードがとりつけられるようになっている。センサボードには、温度センサ、
加速度センサ、光センサ、磁気センサが搭載されており、マイクロフォンとスピーカも ボード上に実装されている (図 2.7 左下参照)。また、無線モジュールに Zigbee が用い
らている MICAz MOTE (図 2.7 右上参照) は、本研究の実装にも使用しているデバイ
スである。現在ではさらに、MOTE MICAz のサイズが切手型になった MICAz OME Module (図 2.7 右下参照) という端末も市販されている。
また MICA MOTE には、TinyOS[9] というオペレーティングシステム(OS)が組
み込まれている。TinyOS とは、カリフォルニア大学バークレー校で開発された MICA MOTE のハードウェアを制御するための OS である。無線センサデバイス用の OS は、
汎用的な OS に比べて要求される役割が違う。ハードウェア資源、特に CPU ・メモリ・
電力量が極めて限られており、また OS の制御対象であるシステムの役割は外部状態 をセンシングし、そのデータを別の場所や装置に送信するのみである。よって TinyOS は、省電力と物理世界とのインタラクションの 2 点に焦点を絞って設計されている。
また TinyOS には、NesC[6] と呼ばれる C 言語を拡張した言語が用いられており、取得
したセンサデータをどのように処理するかという命令を記述することで、開発者が自
由にプログラミングによってカスタマイズできる仕様になっている。
図 2.7: MICA MOTE(出典:Crossbow 社ウェブページ [5])
uParts
uParts[12] は、カールスルーエ大学 TecO[24] で開発された無線センサデバイスであ る。uPart の最大の特徴は、全長が横 20mm 縦 17mm と超小型であることがあげられ る (図 2.8 参照)。また低コストで駆動時間が長いことや、MICA MOTE 等の他の無線 センサデバイスに比べ、非常に安価(約 2000 円程度)であることが利点である。
図 2.8: uPart とセンサ
以下に uPart の構成をまとめる。
センサ基盤は組み込み型で、ボールスイッチと温度・照度センサのみとなっている。
また CPU の処理能力も MICA MOTE より低く、パケットの送信はできるが受信はで
きない。また、センサデータプログラミングによる変更もできない。
表 2.2: uPart の構成
CPU Microchip 12F675 at 4 MHz
1.4KBytes Programming Memory
Wireless 315MHz, 19.2KMbps,
Sensors Ball-switch
Temperature sensor(Microchip TC1047) Light Sensor (Taos TSL13)
Battery Lithium Coin cell types
デバイス自体の性能は MICA MOTE と比べて劣るものの、その小型軽量さ・安価 さ・省電力さは、無線センサデバイスとして十分な要件をそろえているといえる。
2.4 本章のまとめ
本章では研究の利用対象である実空間指向ゲームの概要にふれ、様々なセンシング
技術を用いた実空間指向ゲームの研究例について述べた。そして、その中でも本研究
の実装で用いる無線センサデバイスについての概要を述べた。
第 3 章 問題提起
本章ではまず実空間指向ゲームの機能要件について述べ、既存の実空間指向ゲーム の問題点をあげる。そしてその問題点を解決する手法として、 WWSD 手法 (Wearable Wireless Sensor Device 手法) をまず提案する。また本手法の有用性を確かめるために 実装したプロトタイプについての説明をする。次に、本手法に関する関連研究やプロ トタイプの現状の設計では、WWSD 手法を用いた実空間指向ゲームの開発が困難で あることを示し、その解決機構として WearMiddle を提案する。
3.1 実空間指向ゲームの機能要件
実空間指向ゲームには、他のゲームには無いいくつかの特徴がある。本節では、実 空間指向ゲームを構成するための機能要件について述べる。実空間指向ゲームの開発 において重要な要件は、以下の3つが挙げられる。
• 相互作用性
実空間上のプレイヤがあたかも仮想空間上に自らがいるような没入感を感じ、実 空間上のプレイヤの行動と仮想空間であるゲームの間に相互作用 (インタラクショ ン) があるかどうか。
• 動作性
プレイヤが実空間内を動き回り、様々なポーズや行動といったアクションを実際 に動作できる、少なくとも 10m 四方程度の動作範囲に対応しているかどうか。
• 偏在性
実空間情報を取得するためのデバイスを、実空間へ偏在させるることが可能かど うか。
あらゆるゲームの開発において常に相互作用性は求められるが、特にプレイヤ自身
の動作や行動が直接仮想空間に反映されるという点で、実空間指向ゲームの相互作用
性は高い。また動作性があるという点は、家庭内で専用コントローラを用いて遊ぶ形
式のゲームにはない、実空間指向ゲーム特有の強みであるといえる。またその分空間
にデバイスがいかに偏在しているかという偏在性をいかに持たせるかが重要な要件で
あるといえ、この要件をいかに実現させるかで、動作性や相互作用性にも影響を及ぼ
すといえる。よって、これら3つの要件をより多く満たすことのできる実空間指向ゲー
ムの開発が求められる。
3.2 既存実空間指向ゲームの問題点の比較
前章で実空間指向ゲームの既存研究において、様々なデバイスが用いられているこ とを述べた。本節ではこれらのデバイスを用いた既存研究を前節で述べた機能要件と 照らし合わせそれぞれの問題点を指摘し、その中で一番優れているデバイスが無線セ ンサデバイスであることを述べる。
まず、表 3.1 に各デバイスにおいての問題点をまとめた。
表 3.1: 既存実空間指向ゲームの問題点の比較
相互作用 動作範囲 偏在性
GPS × ○ ○
カメラ ○ × △
ウェアラブル ○ ○ ×
無線センサデバイ ス
○ ○ ○
相互作用はプレイヤの具体的な行動や状況をセンシングしている場合は○、してい ない場合を×とした。動作範囲は少なくとも 10m 四方以上、動作可能なものを○、そ れ以外を×とした。偏在性は、プレイヤがデバイスの存在に不自然さを感じないもの を○、不自然さを感じるものは×とした。
3.2.1 GPS
まず GPS を利用している Space Race では、プレイヤの動作範囲が広く、すでに携 帯端末等に GPS が搭載されていることからも装着性は極めて高い。しかし問題点とし て、GPS はあくまで人の位置のみをセンシングしており、プレイヤの行動をセンシン グしているわけではないため、プレイヤとゲームとの相互作用が少なく相互作用が十 分であるとは言えない。
3.2.2 カメラ
カメラでの画像解析技術を用い、プレイヤのアクションをそのままゲームのインター
フェースとしている AceSpeeder2 に関しては、相互作用の問題はクリアしている。ま
た、ゲームセンタやアミューズメントパークにおけるゲームを想定した場合に限り、偏
在性もある。しかし、カメラが固定であることが前提であるため、必然的にプレイヤ
の行動範囲はカメラが認識できる範囲に限られてしまい、動作範囲が十分だとはいえ
ないという問題点が挙げられる。
3.2.3 ウェアラブルコンピュータ
ウェアラブルコンピュータを用いた HumanPacman は、プレイヤが広範囲の実空間 を動き回ることができ、HMD によってプレイヤが相互作用による没入感を得ること に成功している。しかし重量デバイスを体に装着しなければならず、プレイヤの円滑 な行動に支障をきたす。
3.2.4 無線センサデバイス
無線センサデバイスを用いたユビキタスモンスターは、プレイヤの網を振る行動が そのままモンスターの捕獲という結果に繋がっており、また無線でデータを通信して いることからプレイヤは自由に空間を動き回ることができるため相互作用性、動作性 を共に持っているといえる。偏在性においては、網に取り付けている無線センサデバ イスが若干大きいサイズのものであるものの(図 2.6 参照)、網を振る際の行動の邪魔 にはほぼならないため、偏在性も持っているといえる。
よって無線センサデバイスによる実空間指向ゲームの開発は、実空間指向ゲームの 機能要件をすべて満たしているといえる。
3.3 WWSD 手法と問題点
前節で取り上げたように、既存の実空間指向ゲームに用いられているデバイスには それぞれの問題点があったが、その中で唯一無線センサデバイスは実空間指向ゲーム の要件を満たしていた。ユビキタスモンスターは道具に無線センサデバイスを取り付 けるアプローチを取っていた。ただ、無線センサデバイスの取り付け対象を道具にし てしまうと、どうしてもその道具の使用が前提となる実空間指向ゲームになってしま うため、汎用性が少ない。
よって本研究のアプローチは、無線センサデバイスをプレイヤの体に取り付け、実空 間指向ゲームの開発に使用する手法を用いることにする。我々はこの手法を「WWSD 手法」 (Wearable Wireless Sensor Device 手法) と名付けた。本節は、その WWSD 手 法の概要と本手法の優位性を示すために、WWSD 手法を用いて実装したプロトタイ プである「UBI-SHOOT!!-ver1.0-」の概説を行う。また、UBI-SHOOT!!-ver1.0-の実装 の際の問題点について述べる。
3.3.1 WWSD 手法の提案
前節で実空間指向ゲームを構成する上での必要な要件として相互作用性・動作性・
偏在性の三つを挙げ、既存研究に足りない部分を指摘した。その中で、我々は既存研
究の中の無線センサデバイスとウェアラブルコンピューティングのアプローチに着目
した。
プレイヤがセンサデバイスを体に取り付けるというアプローチは、プレイヤのアク ションとゲームとの相互作用が密になる t ため、ゲームへの没入感を得ることができ る。また、プレイヤ自身が無線センサデバイスと一体化して動き回ることが可能なの で、動作性という面もかなり自由度が高い。唯一のネックである偏在性の欠如に関し ては、従来のウェアラブルコンピューティングに用いられるデバイスが大型なデバイ スが多く用いられていらことが原因であった。しかし、小型で軽量である無線センサ デバイスをプレイヤの体に装着させることで、プレイヤがデバイスを装着する際の不 自然さを解消できる。よって我々は偏在性を高く保ち、相互作用と動作範囲のメリッ トを損なわない手法である WWSD 手法を提案する。
2.1 節において、無線センサデバイスの発達により小型軽量・安価・省電力・耐故障性 に優れたものが開発されていることは述べた。無線センサデバイスは、 Human Pacman に用いられているどのデバイスよりも小さく軽量であり、またバッテリ電源も内蔵し ているため長時間稼働し、ウェアラブルに適しているといえる。また無線センサデバ イスは、センサデータを受信するためのシンクノードとの通信可能距離が、無線セン サデバイスの種類にもよるが 10m〜30m あるためプレイヤの動作範囲について問題点 はない。そして前章でも述べたように、無線センサデバイスには加速度・照度・温度 などのあらゆるセンサが取り付け可能なため、プレイヤがどのように動いたかという モーションだけでなく、プレイヤの置かれている環境情報もセンシングできる。よっ て、実空間と仮想空間との相互作用の面でも様々な効果が期待できる。
3.3.2 WWSD 手法を用いたプロトタイプの実装
WWSD 手法の有用性を確かめるためのプロトタイプとして「UBI-SHOT!!-ver1.0」
を実装した。UBI-SHOOT!!-ver1.0-は、自機と敵機が打ち合う簡単なシューティング ゲームである。 UBI-SHOOT!!-ver1.0-では、MICAz MOTE と uPart という無線センサ デバイスを用い、トラの着ぐるみにデバイスを取り付けた。プレイヤは頭上に MICAz MOTE を、手のひらの uPart を取り付け、「移動」、「パワーチャージ」、「攻撃」とい う三種類のコンテキストを元にゲームを行う。
UBI-SHOOT!!-ver1.0 は実装において無線センサデバイスから送られるセンサデー
タ(0〜256 の数値)を元に、移動や攻撃というゲームイベントをセンサデータからプ レイヤのコンテキストを解析し処理していた (図 3.1 参照)。UBI-SHOOT!!-ver1.0-に 用いたコンテキストの定義表は表 3.2 に示す。
頭部に取り付けた MICA MOTE の加速度センサから送られるセンサデータが閾値
を超えたら「右または左移動」、手のひらにつけた uPart 照度センサからのデータがあ
る閾値より低くなったら「光が遮られた状態=手を握った状態=パワーチャージ」と
いうコンテキストの定義をし、同様に、パワーチャージの状態から uPart のボールス
イッチセンサが腕の動きを感知したら「手を突き出した状態=攻撃」という定義を独
図 3.1: UBI-SHOOT!!-ver1.0- システム図
表 3.2: UBI-SHOOT!!-ver1.0-におけるコンテキスト定義表
コンテキスト ノードタイプ 位置 行動
左右移動 MICAz MOTE(加 速度センサ)
頭上 頭を傾ける
パワーチャージ uPart(照度センサ) 手のひら 手を握る
攻撃 uPart(ボ ー ル ス イ
ッチセンサ)
腕 腕を前に突き出す
自に設定した。図 3.2 は「パワーチャージ」状態から「攻撃」状態にコンテキストが 移行する際のモーションを、図 3.3 はゲームスクリーンショットを示している。
3.3.3 WWSD 方式の問題点
本節では、 UBI-SHOOT!!-ver1.0-から評価した WWSD 手法の問題点について述べる。
コンテキスト定義における問題
UBI-SHOOT!!-ver1.0-の実装において、ゲームのイベント処理に用いるコンテキス トの定義は開発者の試行錯誤の上設計したものであった。従来のアプリケーションに おいて、センサデータから解析をするコンテキストの定義は、多くの場合そのアプリ ケーションやゲームにおいて必要な要件を満たすためだけのものとして設計されやす く、広く汎用的に使用できるシステムを構築することは困難である。
よって、実空間指向ゲームを WWSD 手法を用いて開発する場合、ゲーム開発者は
図 3.4 の手順を踏まなければならなくなる。まず、ゲーム開発者は開発したい実空間
指向ゲームのジャンルを決め、ゲームの目的を決める。その後、ゲームに使用するた
めのコンテキストの定義を行う。そして、その定義方法にそって無線センサデバイス
図 3.2: UBI-SHOOT!!-ver1.0-:「パワーチャージ」から「攻撃」へ変化時のアクション
(左:「パワーチャージ」 右:「攻撃」)
図 3.3: UBI-SHOOT!!-ver1.0-:「パワーチャージ」から「攻撃」へ変化時のスクリーン
ショット(左:「パワーチャージ」 右:「攻撃」が敵機に命中した瞬間)
の設置、センサデータの取得、コンテキストデータへの抽象化、動作テストを繰り返 し、期待どおりの動作がゲームで起これば、コンテキストの定義が終了となる。特に 後半の 5 ステップは、コンテキスト定義をやり直す場合や、開発に用いるコンテキス トの数だけ繰り返し行う必要があるため、開発は困難である。
ࠥࡓࠫࡖࡦ࡞ቯ
ࠥࡓߩ⋡⊛ቯ
ࠦࡦ࠹ࠠࠬ࠻ⷐઙቯ
ࠦࡦ࠹ࠠࠬ࠻ቯ⟵
ࡦࠨ࠺ࡃࠗࠬߩ⸳⟎
ࡦࠨ࠺࠲ߩขᓧ
ࠦࡦ࠹ࠠࠬ࠻⸃ᨆ
േ࠹ࠬ࠻
㐿⊒㐿ᆎ
㐿⊒⚳ੌ
࠹ࠬ࠻ᄬᢌ
ઁࠦࡦ࠹ࠠࠬ࠻ቯ⟵
![図 2.4: Human Pacman に用いられたウェラブルコンピューター (文献 [4] より引用)](https://thumb-ap.123doks.com/thumbv2/123deta/6085740.2081622/15.892.266.608.182.487/図24HumanPacmanに用いられたウェラブルコンピューター文献4より引用.webp)
![表 2.1: 無線センサデバイスの代表的な通信規格 (出典:Sensor Network Technology [21])](https://thumb-ap.123doks.com/thumbv2/123deta/6085740.2081622/18.892.115.761.349.532/表21無線センサデバイスの代表的な通信規格出典SensorNetworkTechnology21.webp)
![図 2.7: MICA MOTE(出典:Crossbow 社ウェブページ [5]) uParts uParts[12] は、カールスルーエ大学 TecO[24] で開発された無線センサデバイスであ る。uPart の最大の特徴は、全長が横 20mm 縦 17mm と超小型であることがあげられ る (図 2.8 参照)。また低コストで駆動時間が長いことや、MICA MOTE 等の他の無線 センサデバイスに比べ、非常に安価(約 2000 円程度)であることが利点である。 図 2.8: uPart とセンサ 以下](https://thumb-ap.123doks.com/thumbv2/123deta/6085740.2081622/20.892.195.677.120.517/ウェブページカールスルーエセンサデバイスコストセンサデバイス.webp)




![図 5.1: uPart Sensor Configuration ページ ([24] より引用)](https://thumb-ap.123doks.com/thumbv2/123deta/6085740.2081622/44.892.264.599.493.720/図51uPartSensorConfigurationページ24より引用.webp)