Burgers
type
equationmodels
on
connected
graphsand their
applicationto open
channel
hydraulicsHidekazu
Yoshioka1’2,
KoichiUnami1,
MasayukiFujihara1
1Graduate
School of Agriculture, Kyoto University2Research
Fellow of Japan Society forthePromotion of ScienceE-mail(Hidekazu Yoshioka):[email protected]
1
IntroductionFlows in water deliverysystems, such
as
open channel networks, pipe networks and pore structuresare
described with the cross-sectionally averaged 1-$D$ models. Water
wave
propagations inopen
channels inparticular have been modeled using the shallow watertheory that
assumes
the incompressibility of fluids andhydrostaticpressure distribution(Szymkiewicz, 2010).In
this
theory,an
open channel network is identified withaconnectedgraph thatconsistsofafinite number ofreachesattachedvia junctions(Bapat,2010; Yoshiokaet al.,
2012). The 1-$D$ shallow water equations (1-D SWEs),
a
system of non-linear hyperbolic partial differentialequations(PDEs)describingthebalance laws of
mass
andmomentuminthe stream direction(UnamiandAlam,2012), haveserved
as one
of the most successful models for water flows in openchannelnetworks. As wellas
the 1-DSWEs, several reducedmathematicalmodels have also been appliedtoboth intheoretical and practical
analysis. Major examples
are
the diffusionwave
models andkinematicwave
models(Singh, 1996; Yen andTsai,2001;Tsai,2002; Santillana andDawson,2010),both of which
are
derived withneglectingthe temporal$and/or$momentum flux terms inthe 1-D SWEs while maintaining the complete
mass
conservationproperty. Althoughthereducedmodelsarenotcapable of reproducingsomeimportanttransientphenomena involvingdiscontinues
watersurface profiles, they
are
recognizedas
useful altematives to the 1-D SWEs because of the simplicity.Thispaperfocuseson
one
of thediffusion wavemodels, the Burgers type equation model(BTE model).TheBTEmodel is
a
non-degenerateparabolic PDE havinga
nonlinear advection term. The model is consideredas
one
ofthe useful minimal models tocharacterizewaterwave
propagations. Typical dependent variable of themodel is water depth
or
its fluctuation. Motikawa (1957) analyzed propagations ofsmall travelingwaves on
water surfaceusing
a
BTEmodel derivedon
the basis of theasymptotic expansionofthe 1-DSWEs. Yu andKevorkian (1992) analyzed
a
BTEmodel for the dynamics of rollwaves
inopen channels, followed upon
byNoble (2007) and Baker et al. (2010). Oey (2005) developed a BTE model for water flows in
narrow
andshallow
areas
of coastalzones
and applied it tonumerical analysis of flows involving wet and dry interfaces.Odai etal. (2006) andOdai and Kubo(2007) developed
an
analytical solution method for the BTE models ofwater depth in inclined channels with uniformrectangularcross-sectionsutilizingtheCole-Hopftransformation
(Hopf, 1950; Cole, 1951). Application of the Cole-Hopftransformation to a BTE model leads to the heat
equationwhose analytical solutionisavailable for simplified
cases
(Salsa, 2009).Nasseri and Attarnejad,(2010)developedavariational methodtosolveaclass of nonlinear PDEs includingaBTEmodel.
Many researches have been carried out for the BTE models in single open channels based
on
thewell-established1-$D$framework. However,
no
approachhas been made for thosein openchannel networks dueto the difficulties in handling singularities encountered atjunctions. Nevertheless, some researches discussed
similar BTE models
on
connected graphs. Bressloffetal. (1997) developeda
nonlinear parabolicPDE of roadtrafficdynamicswhoseresolutionis reduced tosolving
a
BTE modelon
a
connectedgraph. Theytransformedthe modelto
an
easily solved integro-differential equation. Theauthorsnumericallysolved the BTEmodelson
connected graphs using FEMs (Yoshioka et al., 2013a-b). Since typical water delivery system consists of
a
number ofreaches presenting a network structure, to reveal mathematical properties of the BTE models
on
connectedgraphs contributes toimprovingunderstandings ofthe water
wave
propagationsinthe domains.The objective of this paper is to carry out mathematical and numerical analyses of a BTE model on
connected graphs. Themathematical analysis focuses on themodel on astar-shaped connected graph defined
later. $A$weak formulation of the model that consistently and implicitly takes
an
internal boundarycondition(IBC) into its formulation is introduced. Unique solvability of steadyand unsteady problems of the model is
proven under certain constraints. An energy estimate and
a
maximum principleare
presented for unsteady(VonBelow, 1986).$A$nodeis
a
point thatrepresentsan
intersectionofreachesoran
end point: here the former is
referredto
as
ajunction and the latteras
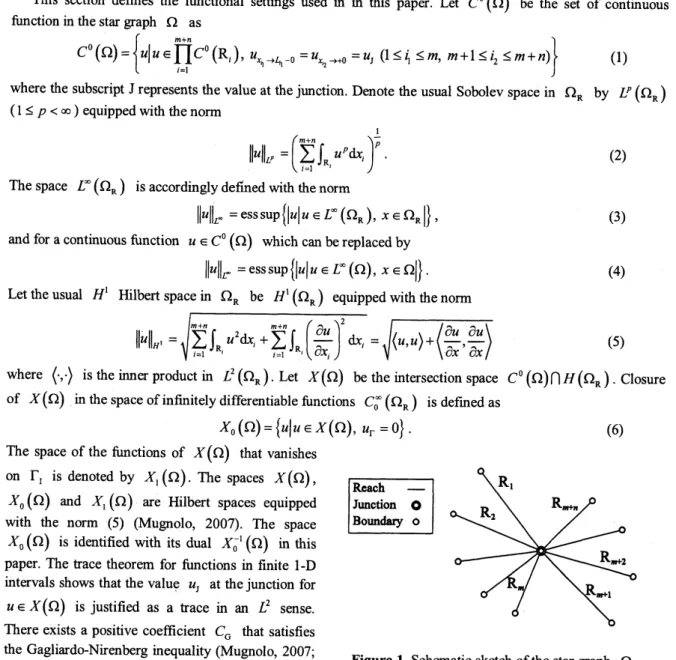
aboundary. Thispaperfocuseson
aconnected graphthat consistsofa
finite numberofstraight reaches meetingatajunction$J$(Figure 1), whichis hereafter referred to
as
astargraph
$\Omega$
.
Thejuncti\‘onattaches$m$ inflowing reaches($R_{1}$ through $R_{m}$)and $n$ outflowing reaches$(R_{m+1}$ through
$R_{m+n})$
.
The $i$th reach of $\Omega$ is denotedby$R_{i}$
.
Thelength of $R_{i}$ is $L_{i}<\infty.$ $A$ 1-$D$abscissa isdefinedina
reach and that in $R_{j}$ is denotedby
$x_{i}$. The reach $R_{i}$ is thus identified with the 1-$D$ interval $(0,L_{i})$
.
Thejunction$J$
can
beregardedas
thedownstream-endsof the inflowing reaches$(x_{i}arrow L_{l}-0$ for $1\leq i\leq m)$
as
wellastheupstream-ends (origins)of the outflowing reaches$(x_{i}arrow+0$ for $m+1\leq i\leq m+n)$
.
Theunionsetofthereachesof $\Omega$ is denotedby $\Omega_{R}=\bigcup_{i\lrcorner-}^{m+n}R_{i}$. Theunion setoftheupstream
boundaries ofthe inflowing reachesof
$\Omega$ isdenoted by
$\Gamma_{I}$ and that of thedownstreamboundaries of the outflowing reaches by
$\Gamma_{o}$. The boundary
$\Gamma$ of $\Omega$ is thereforedecomposed
as
$\Gamma=\Gamma_{I}\cup\Gamma_{o}.$
2.2 Functional settings
This section defines the functional settings used in in this paper. Let $C^{0}(\Omega)$ be the set ofcontinuous
functionin thestar graph $\Omega$ as
$C^{0}(\Omega)=\{$$u|_{i=1}^{m+n}u\in\Gamma I^{c^{0}}(R_{i}),$ $u_{x_{1}arrow l_{t_{1}}-0}=u_{x_{1}arrow+0}=u_{J}(1\leq i\leq m, m+1\leq i_{2}\leq m+n)\}$ (1)
where the subscript$J$representsthe valueatthe junction. Denote the usual Sobolevspace
in $\Omega_{R}$ by $L^{p}(\Omega_{R})$ $(1\leq p<\infty)$equipped with the
nonn
$\Vert u\Vert_{L^{p}}=(\sum_{i=1}^{m+n}\int_{R_{}}u^{p}dx_{i})^{\frac{1}{p}}$
(2)
The space $L^{\infty}(\Omega_{R})$ isaccordingly
defined
withthenorm$\Vert u\Vert_{L^{\infty}}=$ess$sup\{|u|u\in L^{\infty}(\Omega_{R}),$ $x\in\Omega_{R}|\}$, (3)
and fora continuous function $u\in C^{0}(\Omega)$ whichcanbe replaced by
$\Vert u\Vert_{L^{\infty}}=$esssup$\{|u|u\in L^{\infty}(\Omega),$ $x\in\Omega|\}$. (4)
Let the usual $H^{1}$ Hilbertspace in
$\Omega_{R}$ be $H^{1}(\Omega_{R})$ equipped with the
norm
$\Vert u\Vert_{H^{1}}=\sqrt{\sum_{t\overline{-}1}^{m+n}\int_{R}u^{2}dx_{l}+\sum_{i--1}^{m+n}\int_{R}(\frac{\partial u}{\partial x_{j}})^{2}dx_{i}}=\sqrt{\langleu,u\rangle+\langle\frac{\partial u}{\partial x},\frac{\partial u}{\partial x}\}}$
(5)
where $\langle\cdot,\cdot\rangle$ is theinnerproduct in
$L^{2}(\Omega_{R})$. Let $X(\Omega)$ be theintersection space $C^{0}(\Omega)\cap H(\Omega_{R})$.Closure
of $X(\Omega)$ in thespaceofinfinitely differentiable functions $C_{0}^{\infty}(\Omega_{R})$ is defmedas
$X_{0}(\Omega)=\{u|u\in X(\Omega),$ $u_{\Gamma}=0\}$ . (6)
The space of the functions of $X(\Omega)$ thatvanishes
on $\Gamma_{I}$ is denoted by $X_{1}(\Omega)$
.
The spaces $X(\Omega)$,Reach –
$X_{0}(\Omega)$ and $X_{1}(\Omega)$ are Hlbert spaces equipped Junction $0$
with the
norm
(5) (Mugnolo, 2007). The space Boundary $0$$X_{0}(\Omega)$ is identifiedwith its dual $X_{0}^{-1}(\Omega)$ inthis
paper. The trace theorem for functions infinite 1-$D$
intervals
shows that the value $u_{J}$ atthe junction for$u\in X(\Omega)$ is justified
as
a trace inan
$L^{2}$sense.
Thereexists apositive coefficient $C_{G}$ that satisfies
theGagliardo-Nirenberg inequality(Mugnolo,2007;
Berkolaiko
andKuchment,2012)$\Vert u\Vert_{L^{\Phi}}\leq\sqrt{C_{o}}\Vert u\Vert_{H^{1}}$ (7)
with $C_{G}>0$
.
Let $L^{p}(0,T;H)$ witha finite $T>0$ denote the spaceof temporally $L^{p}$ class functions from$(0,T)$ intoaHilbertspace $H$
.
Thespace $L^{p}(0,T;H)$ $(1\leq p<\infty)$ is equipped with thenorm
$\Vert u\Vert_{L^{p}(0,T.H)}=(\int_{0}^{T}\Vert u\Vert_{H}^{p}dt)^{\frac{1}{p}}$(8)
Similarly, thespace $L^{\infty}(0,T;H)$ isequippedwith the
norm
$\Vert u\Vert_{L^{\infty}(0,T.H)}=$
ess
$sup\{\Vert u\Vert_{H}|t\in(0,t)\}$. (9)3
Burgerstype equation(BTE)model3.1
Model descriptionWater
wave
propagationsinopen
channelsare
reasonablycharacterized witha
BTEmodel,a
parabolic PDEhaving
a
nonlinear advectionterm.Typical form of the model is$\frac{\partial h}{\partial t}+\frac{\partial}{\partial x}(\frac{1}{M+1}m^{M+1}-D\frac{\partial h}{\partial x})=\frac{\partial h}{\partial t}+\frac{\partial q}{\partial\kappa}=0$ (10)
with theunitwidth discharge ofwater $q$ defined
as
$q=q(h)= \frac{1}{M+1}m^{M+1}-D\frac{\partial h}{\partial x}$ (11)
where thedependentvariable $h=h(t,x)$ represents thewaterdepthitsfluctuation, $V>0$
and
$D>0$are
themodel parameters assumed
as
reach-distributed constant and $M\geq 0$ is another model parameter relatedwithfriction laws (Sing, 1996). For example, $M=1$ in Onizukaand Odai (1998), and $M=0.666$ inMizumura
(2010).Inthispaper,theseparameters
are
assumedtobeboundedasin the literatures. The BTE model (10) withthe particular choice of $M=0$ loses the nonlinearity and is regarded
as
a solute transport equation of acontaminantinwhich $h,$ $V$ and $D$
are
understoodas
theconcentrationofthe contaminant,thefluid velocityand thedispersioncoefficient,respectively(Yoshioka et al.,inpress).
3.2
Internal boundarycondition (IBC)Amajor mathematical and numerical difficultyinsolvingthe BTE model (10) on aconnected graphisthe
existenceofjunctions, whichrequire the
use
of appropriate BCsso
thattheproblemiswell-posed. The IBCsare
also referred to
as
the Kirchhoffs conditionsor
the transmissive conditions in the literatures (Lumer, 1980;Pokomyi andBorovskikh,2004).Influencesofthe IBCs
on
propertiesof solutions toPDEson
connectedgraphshave extensivelybeen studied, inparticular for the spectral theory(Carlson, 2009),solvabilityandmultiplicity
theory (Von Below, 1986; Lubary, 1998), semi-group theory (Mugnolo, 2007) and relations with stochastic
processes (FriedlinandSheu, 2000). The authors used
an
analytical approach for parabolicPDEson
connectedgraphs based
on
the weak forms that implicitly incorporatethe IBCsto investigate mathematical properties ofthe PDEs andtodevelopefficient numericalmethodsfor solvingthem(Yoshiokaet al.,2012).
In thispaper, a similaranalyticalmethodis presentedto dealwith the BTE model (10) consistently
on
thestar graph $\Omega$. The model (10)
on
$\Omega$ shall be understoodas
a weak formso
that thejunction $J$ in $\Omega$ isconsistently dealtwith. The weak form of(10) is givenby
$\sum_{i=1}^{m+n}\int_{R_{J}}[w\frac{\partial h}{\partial t}-\frac{\partial\eta\nu}{a_{i}}(\frac{1}{M+1}V_{f}h^{M+1}-D_{i}\frac{\partial h}{\partial x_{l}})]dr_{i}=t\int_{R_{l}}i=1(w\frac{\partial h}{\partial t}-\frac{\partial w}{\partial x_{i}}q_{t}(h))$ dr,$=0$ (12)
wherethe value of $h$ isdirectlyspecifiedon $\Gamma_{I}$ ($D$chlet boundarycondition)and the free outflow condition
$D=0\underline{\partial h}$
(13)
$/\partial x_{t}$
is assumed
on
$\Gamma_{o}$ (Neumannboundarycondition).No boundary termis embodied in (12).Hereafter,the weakform (12) is regarded
as
the BTE model. Accordingto Cecchi etal. (1996) and Clark etal. (2011), the 1-$D$counterpart of(12) is well-posed and hasaunique weak solution with $H^{1}$ regularity. Theparameters
$V_{t}>0$
theconstraint
$\Delta V=\sum_{j=m+1}^{m+n}V_{;}-\sum_{j=1}^{m}V_{i}=0$, (14)
which is understood
as a
balancelaw of $V_{i}$ around the junction J. The constraint(14) for the linear
case
ofcontaminanttransport$(M=0)$
means
physically thatmass
conservation ofwaterin terms of the discharges issatisfiedat$J$(Oppenheimer,2000;Yoshioka
et al.,inpress).Theconstraint (14) isessentialin ordertoguarantee
the
energy estimate
andthemaximum
principleof the BTEmodelas
shown inthelater sections.The BTE model (12) implicitly
assumes an
IBCatthejunction J. The IBCisnotembodied in (12) andis referred toas
the implicit IBC (Yoshiokaet al., 2013), which is equivalent to the conventional ones for thesolution $h$ ifitssufficientregularityisguaranteed.
By (14),arepresentationformulafor the IBCis obtained
as
$\sum_{i=1}^{m}q_{i}(h)|_{\chi_{}arrow L_{l}-0}-\sum_{i=m+1}^{m+n}q_{i}(h)|_{\chi,arrow+0}=\sum_{;=1}^{m}D_{i}\frac{\partial h}{\ _{i}}|_{x,arrow L_{l}-0}- \sum_{i=m+1}^{m+n}D_{i}\frac{\partial h}{\ _{\dot{z}}}|_{x_{t}arrow*\mathfrak{v}}=0$ . (15)
The IBC (15) describesa
mass
conservationlaw of wateratthe junction$J$fora
nonlinearcase
$(M\geq 1)$and thatofacontaminantfor the linear
case
$(M=0)$.
Each partialderivativesin(15)isunderstood in thesense
ofa
tracebecause the space ofdifferentiable functions $C^{1}(\overline{R_{i}})$ is dense in $H^{1}(R_{i})$ (Salsa, 2009).
The IBC (15) is
satisfiedin astrong
sense
for the solution $h$ in $H^{2}(\Omega_{R})$.
4 SolvabilityofBTE $m$odel
on
connected graphThe objective ofthis section is toprove unique
existence
ofthe weak solution $h$ under the homogenous$D$ chlet boundary conditions. The
parameter $M$ is assumedto equal to
or
largerthan1.
The proofspresentedin this section
can
also be applied to the problems with other boundary conditions, suchas
the homogenousNeumannboundarycondition (13).Here, (12) is rewritten inthe abstract fom
$\langle w,\frac{\partial}{\partial t}h\}+a(w,h)+b(w,h,h)=0$ (16)
withthebi-linearform
$a(w,h)= \sum_{\}=1}^{m+n}\int_{R_{1}}D_{i}\frac{\partial w\partial h}{\partial x_{l}\partial\kappa_{l}}dx_{i}$ (17)
andthe(non-linear)operatorform
$b(w,u,v)=- \sum_{i=1}^{m+n}\int_{R_{1}}\frac{1}{M+1}V_{i}\frac{\partial w}{\partial x_{i}}u^{M}vdx_{i}$ . (18)
Here also considers thesteadycounterpart
$a(w,h)+b(w,h,h)= \int_{\Omega}$$wfdx=\langle w,f\rangle$ (19)
with
a
source
$f$,whichisindependentofthe solution $h.$4.1
Steady problemThis sectionproves unique solvabilityofthe steady problem (19) for $h\in X_{0}(\Omega)$ with $w\in X_{0}(\Omega)$
.
Theproofs presentedin this sectionareinspired by Boules (1990)whopresentedunique solvability ofaBTE model
$(M=1)$in a 1-$D$interval.Define theupperandlower bounds of
$V_{i}$
as
$\overline{V}=\max_{1\leq i\leq m+n}V_{i}$ and
$\underline{V}=\min_{1\leq i\leq m+n}V_{i}$, (20)
respectively Similarly,definetheupperand lower boundsof $D_{j}$ as
$\overline{D}=\max_{1\leq i\leq m+n}D_{i}$ and
$\underline{D}=\min_{\lrcorner 1<\leq m+n}D_{i}$, (21)
respectively Several important properties ofthebi-linearform $a$ andtheoperatorform $b$
are
presented.Thebi-linearform $a$ satisfies
$|a(w,h)|=| \sum_{i=1}^{m+n}\int_{R},$$D_{i} \frac{\partial w\partial h}{\partial x_{i}\partial_{X_{;}}}dx_{i}|\leq\overline{D}\Vert\frac{\partial w}{\partial x}\Vert_{L^{2}}\Vert\frac{\partial h}{\partial x}\Vert_{L^{2}}\leq\overline{D}\Vert w\Vert_{H^{1}}\Vert h\Vert_{H^{1}}$
(22) and
$a(u,u)= \sum_{i=1}^{m+n}\int_{R_{J}}D_{i}(\frac{\partial u}{\ })^{2} dx_{l}\geq\underline{D}\Vert\frac{\partial u}{\ } \Vert_{L^{2}}^{2}\geq a\Vert u\Vert_{H^{1}}^{2}$ (23)
for $u\in X(\Omega)$ with a somepositive constant $a$, showing that it is bounded and coercive (Mugnoro, 2007).
The operator form $b$ isalso bounded for $u\in X_{0}(\Omega)$
.
Infact
according tothe Sobolev embedding theorem(Tartar, 2000),the inequality
$|b(w,u,v)|=| \sum_{i=1}^{m+n}\int_{R_{1}}V_{i}\frac{\partial w}{\partial x}u^{M}vdx_{l}|\leq\beta\Vert w\Vert_{H^{1}}\Vert u\Vert_{H^{1}}^{M}\Vert v\Vert_{H^{1}}$ (24)
with $\beta=\overline{V}(C_{G})^{\frac{M}{2}}>0$ holds. Definethe operator $\lambda(u,v)\in X_{0}(\Omega)$ via theinnerproduct
$b(w,u,\nu)=\langle\lambda(u,v),w\rangle$, (25)
and denote $\lambda(u,u)$ by $\lambda(u)$
.
Thenorm
of $\lambda(u)$ is givenby$\Vert\lambda(u)\Vert=\sup\{\frac{\langle\lambda(u),w\rangle}{\Vert w\Vert_{H^{1}}}w\in X_{0}(\Omega),$$w\neq 0\}\leq\overline{V}(C_{G})^{\frac{M}{2}}\Vert u|\ovalbox{\tt\small REJECT}_{l}=\beta\Vert u|\kappa_{1}$ , (26)
showing that $\lambda(u)$ is bounded for $u\in X_{0}(\Omega)$ Furthemore, $\lambda(u)$ is continuous. In fact, for
$u_{1},u_{2}\in X_{0}(\Omega)$ the inequality
$\Vert\lambda(u_{1})-\lambda(u_{2})\Vert=\sup\{\frac{\langle\lambda(u_{1})-\lambda(u_{2}),w\rangle}{\Vert w\Vert_{H^{I}}}w\in X_{0}(\Omega),$ $w \neq 0\}\leq\overline{V}\sum_{j=1}^{M-1}\Vert u_{1}\Vert_{\Gamma}^{j}\Vert u_{2}|\beta_{\Phi}^{-1-1}\Vert u_{1}-u_{2}\Vert_{L^{\infty}}$ (27)
issatisfiedbecause $\overline{V}\sum_{j=1}^{M-1}\Vert u_{1}\Vert_{L^{\infty}}^{J}\Vert u_{2}|\psi_{L^{Q}}-j-1$ isbounded.
Before staltingthemainproof,
a
uni-variatefunction $g=g(r)$ with $r\geq 0$ and $M$,defined by$g(r)=r(a-\beta r^{M})$ (28)
is introduced.The function $g$ satisfies
$g(O)=g(r_{0})=0$ with $r_{0}=( \frac{\alpha}{\beta})^{\frac{1}{M}}$
(29)
$\frac{d}{dr}g(r_{1})=0$ with $r_{1}=( \frac{a}{\beta(M+1)})^{\frac{1}{M}}$ and $g(r_{1})= \frac{M}{\beta^{\frac{1}{M}}}(\frac{\alpha}{M+1})^{\frac{M+1}{M}}$ (30)
The function $g$ is strictly positive in $(0,r_{0})$ and attains its maximal at $r=r_{1}<r_{0}.$ $g$ monotonically
increasesand decreasesin $(0,r_{1})$ andin $(r_{1},r_{0})$,respectively Itfollows that theequation
$r(\alpha-\beta\mu)=\overline{g}$ (31)
withthe constant $g$ satisfying
$0<\overline{g}<g(r_{1})$ . (32)
has twopositivesolutions $r_{m}$ and $r_{M}$ such that
$0<r_{m}<r_{1}<r_{M}<r_{0}$. (33)
Herefirstlyprovesthe followingtheorem.
Theorem 1.There existsauniquesolution $u\in X_{0}(\Omega)$ tothe linearproblem
$a(w,v)+b(w,h,\nu)=(w,f\rangle (34)$
$\Vert h\Vert_{H^{1}}<r_{m}$ (35)
holds where $w\in X_{0}(\Omega)$ isthe weight, $f\in X(\Omega)$ isa sufficiently regular
source
termsuch that
$\Vert f\Vert=\overline{g}=\sup\{\frac{\langle f,w\rangle}{\Vert w\Vert_{L^{2}}}w\in X_{0}(\Omega),$$w\neq 0\}\leq g(r_{m})$
(36) with
$K= \frac{\beta Mr_{m}^{M-1}\Vert f\Vert}{(\alpha-\beta r_{m}^{M})^{2}}<1$
.
(37)Notethat $r_{m}$ depends onlyon $f,$ $\alpha,$ $\beta$ and $M.$
Proof of
Theorem 1.
Theset$D(r_{m})=\{h|h\in X_{0}(\Omega),$ $\Vert h\Vert_{H^{1}}<r_{m}\}$ (38)
isacompact,
convex
subset of $X_{0}(\Omega)$.By (23) and (24),the left hand sideof (34) is bounded fromzero
as$a(v,v)+b(v,h,v)\geq\alpha\Vert v\Vert_{H^{1}}^{2}-\beta\Vert v\Vert_{H^{1}}^{2}|h\Vert_{H^{1}}^{M}=(\alpha-\beta\Vert h\Vert_{H^{1}}^{M})\Vert v\Vert_{H^{1}}^{2}\geq(\alpha-\beta r_{m}^{M})\Vert v\Vert_{H^{1}}^{2}$, (39)
showingthatitis coercive.Application of the Lax-Milgram Theorem(AtkinsonandHan,2009)to (34) leads to
that thesolution $v\in X_{0}(\Omega)$ existsandisuniquelydetermined.
Here secondlyprovesunique solvability of(19) under the stated conditions.
Theorem
2.
(19) hasauniquesolution $h\in X_{0}(\Omega)$ under the stated conditions.Proof of
Theorem
2.
Denote $\Phi(h)$ by the map identified with the inverse ofthe
operator $A_{h}$, which isdefinedvia the innerproductas
$\langle A_{h}v,w\rangle=a(w,v)+b(w,h,v)$ , (40)
namely,
$\Phi(h)=(A_{h})^{-1}f$ . (41)
Theoperator
norm
of $A_{h}$ satisfies$\Vert A_{h}v\Vert=\sup\{\frac{|a(w,v)+b(w,h,v)|}{\Vert w||_{H^{1}}}w\in X(\Omega),$$w \neq 0\}\geq\frac{a(v,v)-|b(v,h,v)|}{\Vert v||_{H^{1}}}\geq(\alpha-\beta r_{m}^{M})\Vert v\Vert_{H^{1}}$
.
(42)Since $A_{h}$ is bijectivebythe defmition, it isanopenmap.Applicationof
the open-mapping theorem(Okamoto
andNakamura, $1997a$)to $A_{h}$ yields theestimate
$\Vert(A_{h})^{-1}\Vert\leq\frac{1}{\alpha-\beta r_{m}^{M}}$, (43)
which further leadsto
$\Vert(A_{h_{1}})^{-1}-(A_{h_{2}})^{-1}\Vert\leq\frac{1}{(\alpha-\beta r_{m}^{M})^{2}}\Vert A_{h_{1}}-A_{h_{2}}\Vert$
.
(44)Application ofadifferentialformulato $A_{h}$ yields
$\Vert A_{I}-A_{h_{2}}\Vert=\sup\{$
$\leq\overline{V}C_{G}$
$\frac{|a(w,v)+b(w,h_{7},v)-a(w,v)-b(w,h_{\eta},v)|}{||v||_{H^{1}}\Vert w||_{H^{1}}}v,w\in X(\Omega),$$v,w\neq 0\}$
.
(45)$\frac{1}{2}\sum_{j=0}^{M-1}\Vert h^{j}\Psi^{-j-1}\Vert_{L^{\infty}}\Vert h-h_{2}\Vert_{H^{1}}$
By (35), (45) resultsin
showingthat $A_{h}$ is continuous. Consequently, $\Phi$ is
a
contractionmap
thatmaps
$X(\Omega)$ onto $X(\Omega)$.
Thisisbecause,by (36) and (39), $\Vert\nu\Vert_{H^{1}}$ is bounded from awayas
$\Vert v\Vert_{H^{1}}\leq\frac{\Vert f\Vert}{\alpha-\beta r_{m}^{M}}\leq\frac{g(r_{m})}{\alpha-\beta r_{m}^{M}}=r_{m}$ (47)
andby (37), (44) and (45), $\Phi$ satisfies theinequality
$\Vert\Phi(h_{r})-\Phi(h_{\eta})\Vert<\Vert h-h_{2}\Vert_{H^{1}}$
.
(48)According to the Leray-Schauder fixed point theorem $($Okamoto $and$ Nakamura, $1997b)$, the solution
$h\in X_{0}(\Omega)$ to (19) existsandisuniquely determined under the stated conditions.
Here finallyprovesthefollowingtheorem.
Theorem
3.
(19) doesnothaveanysolutions such that$r_{m}<\Vert h\Vert_{H^{1}}<r_{M}$. (49)
Proof of Theorem
3.
Substituting $w=h$ into (19) yields$a(h,h)+b(h,h,h)=\langle w,f\rangle$, (50)
leadingtothe inequality
$(\alpha-\beta\Vert h|\beta_{1})\Vert h\Vert_{H^{1}}\leq\Vert f\Vert$
.
(51)Substituting (36) into (51) yields
$(\alpha-\beta\Vert h\Vert_{H^{1}}^{M})\Vert h\Vert_{H^{1}}\leq g(r_{m})$ . (52)
Since $r_{m}$ and $r_{M}$
are
thesolutionsto (31),theassumption (49) contradicts withthe inequality (52) showingthat thestatementistrue.
It
can
beshownin
an
essentiallysimilarwaythatthe solution $h\in X_{0}(\Omega)$ totheweak form$a(w,h)+b’(w,h,h)+c(w,h)+d\langle w,h\rangle=\langle w,f\rangle$ (53)
withapositiveconstant $d$ and theoperatorform
$b’(w,u,v)=- \sum_{t=1}^{m+n}\int_{R_{J}}\frac{\partial w}{\partial\kappa_{t}}(\frac{1}{j+1}\sum_{/\overline{-}1}^{M}V_{l.j}u^{j})vdx_{l}$ (54)
with
a
positive and boundedsequence
$V_{i.j}$,hasa
unique solution $h\in X_{0}(\Omega)$ suchthat $\Vert h\Vert_{H^{1}}^{2}<M^{-1}r_{m}^{M}$.
Notethat the analysis camiedoutinthissectiondoes not
assume
theconstraint (14),whichon
the other handserves as
a
crucial condition that determinespropertiesof solutionstothe unsteady BTE model.4.2
Unsteadyproblem4.2.1
Energyestimate
Energyestimateof the problem (16) is obtainedusing theFaedo-Galerkinmethod,which
ensures
theglobaluniqueexistence ofthesolution $h.$
Theorem 4. Theenergyestimate
of
(16) isderivedas$\frac{1d}{2dt}\Vert h\Vert_{L^{2}}^{2}+\alpha\Vert h\Vert_{H^{1}}^{2}\leq 0$
.
(55)Proof of Theorem
4.
Denote $W$ bya
separable base of linearlyindependent elementsof $X_{0}(\Omega)$.
Considerlinearly independentelements $h_{k}$ $(k=1,2,3\ldots)$ in $L^{2}(0,T;X_{0}(\Omega))$ defined
as
$h_{k}= \sum_{j=1}^{k}p_{/}w_{jk}(t)$ (56)
fromthe ordinary differential equations(ODEs)
$\{p_{j_{1}},\frac{\partial}{\partial t}h_{k}\}+a(p_{j_{1}},h_{k})+b(p_{j_{1}},h_{k},h_{k})=0,1\leq j_{1}\leq k$ (57)
with the initial condition
$h_{\eta}(t=0)=h_{k,0}$ (58)
where $h_{k,0}$ is
a
orthogonal projection of $h\in L^{2}(0,T;X(\Omega))$ to $W$.
Thesquare matrixconstructed from the
coefficients ofthe first term ofthe left hand side of (57) is
a
Gram matrix. The Peano’s existence theorem(Hartman, 2002) shows that the approximate solution $h_{k}$ exists and is uniquely determined atleast locally in
$(0,T)$.Multiplying (57) by $\omega_{jk}$ and assembling it for $1\leq j\leq k$ yields
$\langle h_{k},\frac{\partial}{\partial t}h_{k}\rangle+a(h_{k},h_{k})+b(h_{k},h_{k},h_{k})=0$
.
(59)By (14),the third term ofthe left hand side of (59) vanishes
as
$b(h_{k},h_{k},h_{k})=- \frac{1}{M+1}\sum_{i=1}^{m+n}V_{i}\int_{R_{l}}\frac{\partial h_{k}}{\partial x_{i}}W_{k}^{+1}dx_{i}=-\frac{1}{(M+1)(M+2)}\Delta Vh_{k,J}^{M+2}=0$, (60)
leading to theenergy inequality
$\frac{1}{2}\frac{d}{dt}\Vert h_{k}\Vert_{L^{2}}^{2}\leq-\alpha\Vert h_{k}\Vert_{H^{1}}^{2}$.
(61)
Integrating (61) from $t=0$ to $t=T>0$ yields theenergy estimateof $h_{k}$
as
$\frac{1}{2}\Vert h_{k}(T)\Vert_{L^{2}}^{2}+\int_{0}^{T}\alpha\Vert h_{k}\Vert_{H^{1}}^{2}dt\leq\frac{1}{2}\Vert h_{k,0}\Vert_{L^{2}}^{2}$ ,(62)
showing that $h_{k}$ remains inaboundedsetof $L^{\infty}(0,T;L^{2}(\Omega))$
.
Since(62) leadsto
$\max_{0\leq t\leq T}\{\Vert h_{k}(T)\Vert_{L^{2}}^{2}+\int_{0}^{t}\alpha\Vert h_{k}\Vert_{H^{1}}^{2}dt\}<\infty$, (63)
$h_{k}$ remains in a bounded set of $L^{2}(0,T;X_{0}(\Omega_{R}))$ . Ascoli-Arzela theorem
shows that there exists a
subsequence $h_{k}$, that
converses
to $h$ weakly in $X_{0}(\Omega)$ and thus there exists a uniquesolution
$h\in L^{2}(0,T;X_{0}(\Omega))\cap L^{\infty}(0,T;L^{2}(\Omega_{R}))$ by(7). The classicalcompactnesstheorem(Temam, 1997)
ensures
thatthe convergence of $h_{k}$ to $h$ is also achieved in the space $L^{2}(0,T;L^{2}(\Omega_{R}))$ in a strong
sense because the
operatorform $b$ definesa continuousand bounded fimction
$\lambda(h)$ for $h\in X_{0}(\Omega)$.The resultin$g$solution $h$
to (16) satisfies (55),which finishes theproof Note also that the inequality
$\frac{1d}{2dt}\Vert h\Vert_{L^{2}}^{2}+\alpha\Vert h\Vert_{L^{2}}^{2}\leq 0$
(64)
follows from theenergy estimate (55),showing that $h$ approaches$0$intheentire $\Omega$ in the $L^{2}$
sense.
4.2.2 Maximum
principleHerea maximumprinciple ofthe BTE model (16) ispresented.
Theorem 5. (16)
satisfies
thefollowing maximumprinciplefor
any $T>0,\cdot$$\Vert h\Vert_{L^{\infty}(\Omega_{R}x(0,T))}<H$ if $\Vert h\Vert_{L^{\infty}(\Omega_{R})}<H<\infty$ (65)
Proof ofTheorem 5.Defineanon-negative functions $f^{+}$ and $f^{-}$ foragenericfunction $f$ as
$f^{+}= \max\{f,0\}$ and $f^{-}=- \min\{f,0\}$, (66)
respectively Substituting $w=(h-H)^{+}\in X_{0}(\Omega)$ and $u=v=h$ into $b$ yields
$b((h-H)^{+},h,h)=- \sum_{i=1}^{m+n}\int_{R_{l}}\frac{1}{M+1}V_{i}\frac{\partial(h-H)^{+}}{\partial x_{t}}h^{M+1}dx_{1}$. (67)
Applicationofthe binomial theoremto $h^{M+i}$ yields the polynomial expansionin
$\Psi^{+1}=(h-H+H)^{M+1}=\sum_{j=0}^{M+1}(\begin{array}{l}M+1j\end{array})(h-H)^{1}H^{M+1-j}$
.
(68)Substituting (68) into (67) leadsto
$b((h-H)^{+},h,h)=- \frac{1}{M+1}\sum_{\dot{j}=0}^{M+1}H^{M+1-j}(\begin{array}{l}+lMj\end{array})\sum_{t=1}^{m+n}V,\int_{R_{J}}\frac{\partial(h-H)^{+}}{\partial \mathfrak{r}_{i}}(h-H)^{j}dx,$
.
(69)By (66),the equality
$\int_{R_{J}}\frac{\partial(h-H)^{+}}{\partial x_{i}}(h-H)^{j}dx_{i}=\int_{R_{l}}\frac{1\partial}{j+1a_{i}}[(h-H)^{+}]^{J+1}dx_{1}=[\frac{1}{j+1}[(h-H)^{+}]^{j+1}]_{\eta=0}^{\eta=A}$ (70)
holds. Substituting (70) into (69) resultsin
$b((h-H)^{+},h,h)= \frac{\Delta\nabla}{M+1}\sum_{j=0}^{M+1}H^{M+1-j}(\begin{array}{l}M+1j\end{array})\frac{1}{j+1}[(h_{J}-H)^{+}]^{J+1}=0$. (71)
In addition,
since
$a((h-H)^{+},h)= \sum_{j=1}^{m+n}\int_{R_{l}}D_{l}\frac{\partial}{\partial x_{l}}(h-H)^{+}\frac{\partial h}{\partial x_{1}}$dx, $= \sum_{j=l}^{m+n}\int_{R_{t}}D_{i}[\frac{\partial}{\partial x_{l}}(h-H)^{+}]^{2}dx_{l}\geq 0$ (72)
holds,substituting (71) and $\langle$72) into (16) obtains theestimate
$\langle(h-H)^{+},\frac{\partial}{\partial t}h\}=\frac{1}{2}\frac{d}{dt}\Vert(h-H)^{+}\Vert_{L^{2}}^{2}=-a((h-H)^{+},h)\leq 0$ , (73)
which leadsto
$\Vert(h-H)^{+}\Vert_{L^{2}}^{2}\leq\Vert(h_{0}-H)^{+}\Vert_{L^{2}}^{2}=0$, (74)
showing that $h<H$ in $\Omega x(0,T)$
.
Similarly, taking $w=-(h-H)^{-}$ in (16) yields $h>-H$ in $\Omega x(0,T)$and thus the statement isproven.An importantconsequenceofthemaximumprincipleisthat the solution witha
non-negative initial condition $h_{\tau}\in X_{0}(\Omega)$ remains non-negativefor arbitrary $t>0.$
5.
Numerical analysison
the BTE model5.1
ConformingPetrov-Galerkinfinite
element methodNumerical analysis
on
theBTE model iscarniedout tofurtherinvestigatebehaviourofits solutions. Dhawanetal. (2012)reviewed numericalmethods for BTE models. Although theyextensively surveyed the numerical
methods, the models
on
connected graphswere
not focusedon.
Some authors developed practical numericalmethodstosolve PDEs on connectedgraphs; however,their methods do necessarilynotguarantee regularity of
the solutions at junctions (Islam and Chaudhry, 1998; Basha and Malaeb, 2007; Tumanova, N., and
\v{C}iegis,
2012). The authors developed
a
conformingPetrov-Galerkm finite elementmethod(CPGFEM)that solves theBTEmodel (12) using weight and interpolationfunctions in $X(\Omega)$ and $X_{0}(\Omega)$ (Yoshiokaet al.,2013).
5.2
Test problemsTestproblems
are
firstlyconsideredto showthatthe condition (14) isessential for themaximumprinciple.Herethe parameter $M$ isset
as
2.Alocally 1-$D$ open channelnetwork $\Omega$as
showninFigure2issetas
thecomputational domain. The key nodes defining the boundaries of the reaches are labeled from A through $E,$
whicharethe upstream-end(A),
downstream-ends
($C$andD)and ajunction(B).Length of each reach equals to1.The reachesA-B,B-$C$andB-$D$
are
labeledas
$R_{i},$ $R_{2}$ and $R_{3}$,respectively. $D$ issetas
0.001 intheentire$\Omega$
.
Here the following twocases
of $V_{i}$are
considered.(a) $V_{1}=3.0,$ $V_{2}=2.0$ and $V_{3}=1.0$ (Thecondition (14) issatisfied)
(b) $V_{1}=3.0,$ $V_{2}=1.0$ and $V_{3}=0.5$ (Thecondition (14) isnotsatisfied:$\Delta V<0$)
(c) $V_{1}=3.0,$ $V_{2}=4.0$ and $V_{3}=2.0$ (Thecondition (14) isnotsatisfied:$\Delta V>0$)
The initial condition is $h=1$ in the entire $\Omega$ . The homogenous Dirichlet boundary condition $h=0$ is
temporalintegrationprocedurearenegligible small.
Figures $2(a)-(c)$ plot the computational results of $h$ for each
case
at $t=500i\Delta t$ with $i$ the integer,clearly showing that themaximumprincipleisviolatedinthe
case
(b) ($h$ exceeds 1 in $\Omega$).Inthecase
(c),themaximumpninciple isnotviolated but the solution has
an
abrupt changeat$B$, whichis not observed in thecase
(a). Inall the
cases
ararefactionwave
propagatesfrom $\eta$ to $R_{2}$ andto $R_{3}$, andshocks resulting from thehomogenous$D$chletboundary condition
are
creatednear
$C$and D.5.2
Real problemThe BTEmodel
as
a
goveming equation ofthe waterdepth fluctuation is applied tosimulate waterwave
propagations in
an
agricultural drainage system in Japan. The computational domain issame
with that ofinYoshiokaetal. (2014). Figures3shows
a
sketch of thedomain $\Omega$, whichisidentified with aconnected graphhaving five reaches andtwojunctions. An underlying water flowtodetermine the coefficients of the BTEmodel
is computedonthe basis ofauniform depth formulaatthe boundaries$AB$and$C$,respectively The boundary
conditions
are
the Dirichletone $h=0.1$ (m)at$AB$and$C$anda
Ree-outflowoneatD.Here, $V$ issetas$V= \frac{2}{3}\sqrt{g}[(h+h)^{\frac{3}{2}}-h^{\frac{3}{2}}]$ (75)
where $g$ is thegravitational acceleration and
ig
is thewaterdepth of the underlying equilibrium flow field.The coefficient $V$ in (75) is determined so that the celerity ofthe inviscid counterpart ofthe BTE
model
reducestothat of the non-dispersivegravitational wave $\sqrt{g(h+h_{0})}$. The coefficient $D$ issetas 0.1 $(m^{2}/s)$in
theentire $\Omega.$ $\Delta t$ is0.004(s). Figure4plots waterwavepropagationsin
thedomainat $t=500i\Delta t.$
6 Conclusions
This
paper
analytically and numerically studied the BTE model. The homogenous $D$chlet boundarycondition
was
assumed in this paper for the simplicity, but linear non-homogenous conditionscan
also beimplemented without any technical difficulties. The mathematical analysis revealed that the BTE model is
well-posed ifthecoefficient $V$ satisfies the balance law (14).Theconstraintwasessentialin ordertoobtain the
energy estimate and the maximumpninciple for the model. Another theoretical analysis focusing on a steady
BTE model with a
source
terms revealed that its solution is uniquely determined if thesource
is sufficientlyregular. Numerical simulation camied out with the CPGFEM showed that the solutions totheBTE model have
singularbehaviouraroundthe unction$J$if (14) isnotsatisfied.
The analyses carriedoutinthispaperrevealeda$paIt$ ofthe basic properties ofthe BTE model. Thispaper
a
priori assumed the constraint (14) as a sufficient condition in order to obtain the
energy
estimate and theMaximum principle.However,itisnot
sure
atthepresentwhether it alsoserves as a
necessaryconditionor
not.In addition, thispaper does not
cover
the models withnonlinear source terms as discussed in the researches(Tersenov, 2010;2012).Furthermore,thereexistsaBTEmodelhavinga degenerate diffusion term(Mizumura,
2010)whosesolutionsareexpectedtobehave
more
irregularly than the non-degenerate counterparts, which alsoserves as an
effective reduced mathematical model of the 1-D SWEs. Future research will focuson
investigations of the well-posedness andmathematical properties of the extended BTE models on connectedgraphs, suchasthe
ones
withadegenerate diffusionterm$and/or$anon-linearsource
term.Acknowledgements
Thisresearchissupported by the JapanSociety forthePromotionofScienceundergrant No.$25\cdot 2731$
.
Theauthors thankto participants of the RIMS Conference: Mathematical Aspects and Applications ofNonlinear
Wave Phenomena for their helpful suggestions and comments. References
[1] Atkinson, K., andHan,W.(2009):TheoreticalNumerical Analysis,Springer, pp.277-365.
[2] Barker, B., Johnson, M.A., Noble,P., Rodrigues, L.M., andZumbrun, K. (2010): Whithamaveragedequations and
modulational stability ofperiodic travelingwaves ofa hyperbolic-parabolic balance law, Journ\’ees\’Equations aur
d\’eriv\’ees partielles,pp. 1-24.
[3] Bapat, R.B.(2010):GraphsandMatrices,Springer, pp.11-39.
[4] Basha, H.A, and Malaeb, L.N. (2007): Eulerian-Lagrangian method for constituenttransport in waterdistribution
(a) (b) (c)
Figure2.Computational results of the testproblems.
Figure 4.$A$sketch of $\Omega$ forthe real problem. Figure5.Computational results ofthe real problem.
[5] Berkolaiko, G.,andKuchment,P.$(2012)$;lntroductiontoQuantum Graphs, Applied Mathematical Society, pp.2-35.
[6] Boules, A.N. (1990): On the existence of the solution ofBurgers’ equation for $n\leq 4$, International Journal
of
Mathematics&MathematicalScience, 13(4),pp.645-650.
[7] Bressan, N., and Quarteroni, (1987): Animplicit/explicitspectralmethod for Burgers’ equation,Calcolo,23(3),
pp.265-284.
[8] Bressloff, P.C.,Dwyer,V.M.,andKearmey, M.J.(1997):Burgers’ equationon abranchingstructure,Physics Letters
$A$,229(1),$pp.37A3.$
[9] Carlson, R. (2009): Spectral theory fornonconservative transmission linenetworks, Networks andHeterogeneous
Media,6(2),pp.257-277.
[10] Cecchi, M.M., Nociforo, R., and Grego, P.P. (1996): Space-time finite elements numerical solution ofBurgers
problems, LeMatematiche,51(1),pp.43-57.
[11] Clark, H.R., Rincon, M.A, and Silva, A. (2011): Analysis and numerical simulation of viscous Burgers equation,
Numerical Functional analysis and optimization,32(7),pp.695-716.
[12] Coclite, G.M.,and Garvello,M. (2010):Vanishingviscosity for trafficonnetworks,SIAMJournal
ofMathematical
Analysis,42(4),pp. 1761-1783.
[13] Cole, J.D.(1951):Onaquasi-linear parabolic equation occurring in aerodynamics,Q.Appl.Math.,9,pp.225-236.
[14] Dhawan, S., Kapoor, S., Kumar, S., and Eawat,S. (2012): Contemporaryreview oftechniquesfor thesolution of
nonlinearBurgersequation, Journal
of
ComputationalScience,3(5),405-419.[15] Evans,L.C.(1998):Partial
Differential
$\Phi$uations,American Mathematical Society, pp.239-428.[16] Friedlin, M., and Sheu, S. (2000): Di$\Re sion$processes on graphs: Stochastic differential equations,large deviation
principle, Probability Theory and RelatedFields, 116,pp.181-220.
[17] Hartman,P.(2002):Ordinary
Differential
Equations, SLAM,Philadelphia.[18] Hopf, E. (1950): The partial differential equation $u,$$+uu_{\chi}-vu_{n}=0$, Communications on Pure and Applied
[19] Islam, M.R,and Chaudhry, M.H.(1998): Modelingofconstituenttransportin unsteady flows in pipe networks,$J$
Hydraul.Eng., 124(11),pp. 1115-1124.
[20] Lubary, J.$A$ (1998): Multiplicity of solutions of second-order linear differential equations
on networks. Linear
Algebra anditsApplications,274,pp.301-315.
[21] Lumer, G., (1980):Conectingoflocaloperatorsand evolution equationsonnetworks,Lecture Notesin Mathematics,
787, pp.219-234.
[22] Mizumura, $K$ (2010): Analytical solution ofnonlinear diffusionwave model, Journal
of
Hydraulic Engineering,17(7),pp.782-789.
[23] Morikawa, G.K. (1957): Non-linear diffusion of flood waves in rivers, Communications on Pure andApplied
Mathematics,10(2),pp291-303.
[24] Mugnoro, D. (2007): Gaussian estimatesforaheat equationona network,NetworksandHeterogeneousMedia, 2,
pp.55-79.
[25] Nasseri, M., and Attarnejad, $K$(2010):Applications of variationaliterationmethodinapplied hydrology, Journal
of
Hydrologic Engineering, 14(9),pp.984-991.
[26] Noble,P. (2007): Linearstability of viscous rollwaves, Communications inPartial
Differential
Equations, 32(11),pp.1681-1713.
[27] Odai, S.N., Kubo, N., and Osato, K. (2006): Analytical solutionof the Burgers equation forsimulating translator
wavesinconveyancechannels,JournalofHydraulicEngineering,132(2),pp.194-199.
[28] OdaiS. N.,andKubo, N.(2007):TheBurgersequation model and the monoclonalwavephenomenoninconveyance
channels,JournalofHydraulic Research,45(1),pp.62-66.
[29] Oey, L.Y.(2005):$A$wetting and drying scheme forPOM,Ocean Modelling,9(2),pp.
133-150.
[30] Onizuka, K.,andOdai,$SN$.(1998): Burgers’equation model forunsteadyflowinopenchannels,Journal ofHydraulic
Engineering,124(5),pp.509-512.
[31] Okamoto,H.,and Nakamura, S.$(1997a)$: FunctionalAnalysis 1, Iwanami Bookstore, pp.97-119.
[32] Okamoto,H.,and Nakamura, S.$(1997b)$: FunctionalAnalysis2, Iwanami Bookstore,pp. 181-198.
[33] Oppenheimer, S.F. $(2(K)0)$:$A$ convection-diffusion problemin a network, AppliedMathematics and Computation,
$112(2-3)$,pp.223-240.
[34] Pokomyi, $Y,V$,, and Borovskikh, $AV$. (2004): Differentialequations on networks
(Geometric graphs), Journal
of
MathematicalScience, 119(6),pp.691-718.
[35] Salsa, S.(2009):Partial
Differential
Equationsin Action,Springer,pp. 13-101.[36] Santillana, M.,andDawson, C. (2010): $A$ numerical approach tostudytheproperties of solutions of the diffusive
waveapproximation ofthe shallowwaterequations, ComputationalGeoscience,14(1),pp.31-53.
[37] Singh, V.P.(1996):KinematicWaveModellinginWater Resources, John Wiley&Sons, Inc.,pp.541-570.
[38] Szymkiewicz, R.(2010):Numerical ModelinginOpen ChannelHydraulics, Springerpublishing.
[39] Tartar,L.(2000):AnIntroductiontoSobolevSpaces$andInterpolation^{}$Spaces, Springer, pp.81-84. [40] Temam,R.(1997):
Infmite-dimensional
DynamicalsystemsinMechanicsand Physics, Springer,pp.82-140.[41] Tersenov, $AS$. (2010): Onthe generalized Burgers equation, Nonlinear
Differential
Equations andApplications,17(4),pp.437-452.
[42] Tersenov, A.S.(2012):$A$condition guaranteeing the absence of the blow-upphenomenonforthe generalized Burgers
equation,NonlinearAnalysis:Theory,Methods, &Applications,75(13),pp.5119-5122.
[43] Tsai, C.W.S. (2002):Applicabilityof kinematic, noninertia, andquasi-steadydynamicwavemodelsto unsteadyflow
routing, Journal ofHydraulic Engineering, 129(8),pp.613-627.
[44] Tumanova,N.,and
Ciegis,
$R(2012)$: Predictor-corrector domaindecompositionalgorithmfor parabolic problemsongraphs, Math.Model. Anal.17(1),pp. 113-127.
[45] Von $B$elow, J. (1986): Classical solvability of linear parabolic equations on networks,
Journal
of Differential
Equations,72(2),pp.316-337.
[46] Yen, B.C,, andTsai, C.W.S. (2001): Onnoninertiaversus diffusionwave infloodrouting, Journal
of
Hydrology,$244(1-2)$,pp.97-104.
[47] Yoshioka,H., Unami, K.,andKawachi,T.(2012):Partialdifferential equation model for spatially distributed statistics
ofcontaminant particles in locally one-dimensional open channel networks, Proceedings
of
Tenth InternationalConference
onHydroscienceandEngineering,$24pp.$[48] Yoshioka, H., Kinjo, N., Unami, K., and Fujihara, M. (2013): $A$ conforming finite element method for
non-conservative advection-diffusionequations on connected graphs,Journal
of
JapanSocietyof
CivilEngineers,Series$A2$(AppliedMechanics),69(2),pp.$I_{-}59-I_{-}70$.(in Japanese)
[49] Yoshioka, H., Unami, K., and Fujihara, M. lnternal boundary conditions for solute transport equations in locally
one-dimensional open channelnetworks, Journal
ofRainwater
CatchmentSystems,$9pp$.(in press)[50] Yoshioka$H$.,Kinjo,N.,Mabaya,G.,Unami, K.,andFujihara, M.(2014):
$A$hyperbolic longitudinaldispersionmodel
of contaminant in open channel networks, Proceedings
of
the $7^{h}$International Symposium on Environmental
Hydraulics,$4pp$.(accepted)
[51] Yu, J., and Kevorkian, J. (1992): Nonlinear evolution of small disturbances into roll waves in an inclined open