関与媒質のレンダリングのための誤差推定法
6
0
0
全文
(2) Vol.2017-CG-168 No.8 Vol.2017-DCC-17 No.8 Vol.2017-CVIM-209 No.8 2017/11/8. 情報処理学会研究報告 IPSJ SIG Technical Report. である Virtual Ray Light(以降 VRL と略す) を提案してい. タリングによる輝度の誤差を推定しているが,推定精度が. る [4].VRL による視線上の散乱光の輝度の積分値を,モ. 高くないという問題がある.名畑らは,多光源レンダリン. ンテカルロ積分によって推定することで,VPL の特異点問. グ法のための誤差推定法を提案し,Lightcuts よりも高精. 題を大幅に緩和している.関与媒質を高精細にレンダリン. 度に誤差を推定できることを示した [7].しかしながらこ. グするためには,膨大な数の VRL が必要となるため,すべ. の方法は物体表面での反射光の輝度の誤差推定にのみ対応. ての VRL からの散乱光の積分値の和を計算することで得. しており,関与媒質のような散乱光の輝度の誤差推定には. られる真値画像の生成は計算コストが高いことが知られて. 対応していない.. いる.そのため,適応的に VRL をサンプリングすること. 多光源レンダリング法を用いて関与媒質をレンダリン. で効率化を達成している手法も提案されている [5][6].し. グする研究もいくつか提案されている.Engelhardt らは,. かしながら,これらの手法は真値画像との誤差を制御でき. VPL を用いて関与媒質をレンダリングする手法を提案し. ていないという問題がある.真値との誤差はノイズやアー. た [2].この方法では,輝度を計算する点と VPL の距離の. ティファクトとなって画像に現れる.ノイズやアーティ. 逆二乗に起因する特異点問題を近似的に緩和する手法を提. ファクトのない画像を生成するためにはパラメータ調整が. 案している.この問題を解決するために,Novak らは VPL. 必要となり,何度もレンダリングする必要がある.. ではなく仮想的な線光源である Virtual Ray Light(VRL). この問題を解決するために,誤差の制御を目標にした. を用いて関与媒質をレンダリングする手法を提案した [4].. Multidimensional Lightcuts 法 [3] が提案されている.し. Frederickx らは,VRL と Ou らの手法 [10] を組み合わせ. かしながら,Multidimensional Lightcuts では,ヒューリ. ることで Novak らの手法 [4] を高速化した [5].Huo らは,. スティクスに基づく誤差の近似をしているため,推定精度. Hasan らが定式化した大規模行列について,行列補完を用. が高くないという問題がある.多光源レンダリングのため. いることで少ないサンプリングで関与媒質をレンダリング. の誤差推定法 [7] は提案されているが,この方法では関与. する手法を提案した [6].これらの手法 [5][6] では,VRL. 媒質が考慮されていない.またこの 2 つの手法のどちらも. を用いた関与媒質レンダリングの高速化を達成している. が VPL を対象としたものであり,VRL を対象とした誤差. が,サンプリングによる誤差を制御していないため,所望. 推定法は提案されていない.. の精度となる画像を生成するためにはパラメータ調整の試. そこで本研究では,VRL を用いた関与媒質の多光源レ ンダリングのための誤差推定法を提案する.膨大な数の. VRL を効率的にレンダリングするために,類似した VRL をクラスタリングする.各クラスタの中で代表的な VRL を用いて,クラスタからの散乱光の輝度を推定する.本研. 行錯誤が必要となるという問題がある. そこで本研究では,VRL を用いた関与媒質レンダリン グのための誤差推定法を提案する.. 3. VRL を用いた関与媒質のレンダリング. 究の貢献は,クラスタリングによる誤差の上限値の導出に. 図 1 に示される関与媒質が含まれるシーンにおいて,視. ある.本稿では,一様な関与媒質を対象とし,散乱光の輝. 点 x0 に視線方向 ωo から入射する光の輝度 L(x0 , ωo ) は以. 度について誤差を推定する.. 下の式で計算される.. 2. 関連研究 近年,仮想的な光源を用いて大域照明計算を行う多光源 レンダリング法 [1] が注目されている.Keller は,仮想的 な点光源 (VPL) を用いて大域照明を計算するインスタン トラジオシティ法を提案した [8].Hasan らは,多光源レン ダリングにおける輝度計算を大規模行列の列の和の計算と して定式化し,行と列をサンプリングすることで多光源レ ンダリングを高速化する手法を提案した [9].この手法 [9] を拡張する方法 [10][11] も提案されているが,基本的にこ れらの方法はクラスタリングやサンプリングによる誤差を 推定していないため,所望の精度となる画像を生成するた めにはパラメータ調整が必要であり,ユーザに多大な負担 をかける.. Walter らは,VPL をクラスタリングし,Lightcuts と呼. L(x0 , ωo ) = Tr (s)Ls (x0 + sωo , −ωo ) + Lm (x0 , ωo ), ここで,Tr は関与媒質による光の減衰率,s は視点から ωo 方向の視線上の最も近い物体表面上の点までの距離,Ls は. x0 + sωo での反射光の輝度,Lm は視線に沿って視点に到 達する散乱光の輝度である. 本研究では,特に散乱光の輝度計算と誤差推定に着目す る.散乱光の輝度 Lm は VRL を用いて計算される.本節 では説明簡略化のため,1 つの VRL による散乱光の輝度. Lm の計算方法について述べる.視線上の点および VRL 上 の点を,それぞれの始点からの距離 u, v を用いて x(u),y(v) とパラメータ表現すると,Lm は以下の式で計算される.. ∫ s∫ Lm ≈ Φ. t. fsu (u, v)fsv (u, v)G(u, v)Vˆ (u, v)dvdu 0. 0. ばれる階層構造として表現することでスケーラブルな多光. こ こ で ,Φ は VRL の 放 射 束 ,s, t は そ れ ぞ れ 視 線 ,. 源レンダリング法を提案した [12].この方法では,クラス. VRL の 長 さ ,fsu , fsv は 散 乱 関 数 で fsu (u, v). ⓒ 2017 Information Processing Society of Japan. =. 2.
(3) Vol.2017-CG-168 No.8 Vol.2017-DCC-17 No.8 Vol.2017-CVIM-209 No.8 2017/11/8. 情報処理学会研究報告 IPSJ SIG Technical Report !"#. !". !$# #). (#$% !" #$% &). ), #'+ $% %&'. !%#. &#'%. #(. &). !"#$%&$'(. !"#,%&$'( - !"#.%&$'(. (#-%. !" #'% #$ &/. #+. #*. &#.%. !&# #*. #*. )* #'+ $% &). &+. !"#,%&$'(. &*. !"#,%&,' - !"#,%&.'. 図 2 提案法の流れ.(a) はじめにすべての VRL を含む VRL クラ 図 1. VRL を用いた散乱光の輝度計算. スタ L1 と視線 E1 の組を層とし L(L1 ,E1 ) と σ11 を推定する.. σs fs (θu (u, v)), fsv (u, v) = σs fs (θv (u, v)) で計算される. ここで σs は散乱係数,fs は位相関数,θu (u, v), θv (u, v) は それぞれ u, v における散乱角とする.G(u, v),Vˆ (u, v) は以. 1 ∥x(u) − y(v)∥2. Vˆ (u, v) = Tr (u)Tr (v)Tr (∥x(u) − y(v)∥)V (u, v). の AABB の対角線の方が大きいため VRL クラスタを分割す る.L1 の分割により,L(L1 ,E1 ) は L(L2 ,E1 ) + L(L3 ,E1 ) で計算 される.L(L2 ,E1 ) , L(L3 ,E1 ) , σ21 , σ31 を推定する.(c) ここでは. σ21 > σ31 として L(L2 ,E1 ) に着目する.誤差が条件を満たさ. 下の式で計算される.. G(u, v) =. (b) 誤差が条件を満たさなければ層を分割する.この場合,L1. なければ層 (L2 , E1 ) を分割する.(d) この場合,E1 の AABB. (1). の対角線の方が大きいため,E1 を分割する.E2 , E3 それぞれ. (2). すまで以上の処理を繰り返す.. について L2 からの輝度と σ22 , σ23 を推定する.条件を満た. ここで,Tr (u), Tr (v) はそれぞれ x(u), y(v) までの減衰率,. らを分割するかは L と E それぞれの AABB(axis-aligned. Tr (∥x(u) − y(v)∥) は x(u) と y(v) の間の減衰率,V (u, v). bounding box) の対角線の長さによって決める.VRL クラ. は x(u) と y(v) の間の可視関数である.. スタが 1 つの VRL で構成されている場合,その VRL を 2. 本稿では,一様な関与媒質を仮定しているため,減衰率 は減衰係数 σt を用いて Tr (x) = e−σt x と表される.また, Vˆ は以下の式に簡略化される.. Vˆ (u, v) = e−σt (u+v+∥x(u)−y(v)∥) V (u, v). (3). つの VRL に分割することで VRL クラスタの分割を行う.. 4.2 層の輝度計算 VRL クラスタ Li に属するすべての VRL から入射して, 視線区間 Ej 上で散乱した光の積分値 L(Li ,Ej ) は以下の式 で計算される.. 4. 提案法 L(Li ,Ej ) =. 4.1 概要 提案法は,名畑らの提案した層化サンプリングに基づく. K ∑. ∫ Φk. k=1. sj1∫ tk. sj0. fsu (u, v)fsv (u, v)G(u, v)Vˆ (u, v)dvdu. 0. (4). 誤差推定法 [7] を拡張し,VRL を用いた関与媒質レンダリ ングに対応する.提案法の流れを図 2 に示す.提案法は,. ここで Φk , tk は VRL クラスタ Li の k 番目の VRL の放射. VRL をクラスタリングし,VRL のクラスタを VRL クラ. 束および長さ,K は Li に属する VRL の数,sj0 , sj1 は Ej. スタと呼ぶ.また視線を分割し各区間で散乱光の積分値を. の両端点の視点からの距離である.以降,式 (4) の被積分. 推定する.視線上の各区間を視線区間と呼ぶ.. 関数を g(u, v) と定義する.. VRL クラスタ Li と視線区間 Ej の組を層化サンプリン. 式 (4) は解析的に計算できないため,モンテカルロ法を. グにおける一つの層 (Li , Ej ) とみなす.各層 (Li , Ej ) に. 用いて推定する.まず K 個の VRL から 1 つの VRL を確. おける散乱光の積分値 L(Li ,Ej ) および標準偏差 σij を推 ˆ と真値 L との差 定し,すべての層での推定値の総和 L. 率質量関数 pmf (k) =. ˆ − L∥ を t 分布を用いて推定する.条件 ∆L < ϵL ˆ ∆L = ∥L ϵ ˆ を満たせば推定値 L ˆ が許容相対誤差 ϵ および σij < √ L. k=1. する. 層化サンプリングを使った推定値の分散は,各層の推定 値の分散の和なため,分散が最大,つまり標準偏差 σij が 最大の層を分割する.層の分割は VRL クラスタ L か視線 区間 E のどちらかを分割することによって行われる.どち ⓒ 2017 Information Processing Society of Japan. Φk. によって選択される.pmf. により k 番目の VRL を選択して式 (4) を推定すると以下 の式となる.. (. 2. 以下とみなす.この条件を満たさない場合には層を分割. ∑KΦk. L(Li ,Ej ) =. K ∑ k=1. )∫ Φk. sj1∫ tk. g(u, v)dudv sj0. (5). 0. 式 (5) における g(u, v) の積分をモンテカルロ法で推定する. (∑ ) K N Φ ∑ k k=1 g(un , vn ) ˆ (L ,E ) = L (6) i j N p(un , vn ) n=1. 3.
(4) Vol.2017-CG-168 No.8 Vol.2017-DCC-17 No.8 Vol.2017-CVIM-209 No.8 2017/11/8. 情報処理学会研究報告 IPSJ SIG Technical Report. !"#$ % !"#. !"#% !"#$ %. 01. , # ) #$ *+,-. &. &"' %(. / &. 01. !!""!"#. %. +. %#. $%&' .. &' ( # ) #$. %$. *!!!"". ' *+,' -. ). !"#. "#. 図 3 VRL と視線区間との幾何学的関係. 図 4. ここで N はサンプル数,p は確率密度関数,un , vn は n 番 目のサンプルである.本研究では,従来法 [7] と同様に各 層 N = 2 サンプルで推定を行う.. + ". "$ !. !$#. Θ の計算. 4.3.2 1/cv の上限値計算 VRL クラスタ L と視線区間 E に対して, c1v の上限値を 計算する.cv は周辺確率密度関数 p(v) の正規化係数であ ∫ ∫ 1 るため, p(v)dv = cv √ 2 dv = 1 が成り立 2 2 h +(v−vh ) sin θ. 4.3 層の標準偏差推定 分割する層を決定するために各層で標準偏差を推定す ˆ (L ,E ) の標準偏差 σij は る.式 (6) によって推定される L i j ∑K √ Φ ( k=1 k) √ σij = Var[g/p] と表される.σij は式 (6) をサ N. つ.これより. 1 = cv. ∫ √. 1. dv. (12). h2 + (v − vh )2 sin2 θ. ンプルして計算される標本分散から推定することもできる. が成り立つ.この式の被積分関数の分母は,p(v) に基づい. が,2 サンプルからでは精度よく標準偏差を推定できない. √ そこで, Var[g/p] を g/p の上限値で近似する.. てサンプルされた VRL 上の点 y(v) から視線へ下ろした垂. 4.3.1 上限値計算. すべての VRL から視線へ下ろした垂線の長さの最小値を. 線の長さに相当する (図 3 右参照).VRL クラスタ L 内の. 提案法では,Novak らが提案した確率密度関数 p(u, v) を. 求めることは,VRL 数が多い場合計算コストが高いため,. 使用する [4].確率密度関数 p(u, v) は,v の周辺確率密度. VRL クラスタの AABB と視線との最短距離 dL を用いる.. 関数 p(v) と条件付き確率密度関数 p(u|v) の積で計算され. 式 (12) の積分区間の最大値は,VRL クラスタ L に属する. る.p(v) および p(u|v) は以下の式で計算される.. VRL の長さの最大値 tmaxL であるため, ∫ dv 1 √ = cv 2 h + (v − vh )2 sin2 θ ∫ tmaxL tmaxL dv = ≤ dL dL 0. cv. p(v) = √. (7). h2 + (v − vh )2 sin2 θ. cv =. −1. sinh. (t. k −vh. h. sin θ ) ( ) h sin θ − sinh−1 −v h sin θ (8). √. h2 + (v − vh )2 sin2 θ. pdf (u|v) =. Θ. となり,上限値は. G(u, v). (9). ここで,h は VRL と視線との最短距離,cv は正規化係数,. vh は視線との距離が最短距離 h となる VRL 上の点のパラ メータ,θ は VRL と視線とのなす角,Θ は y(v) における 視線区間がなす平面角である (図 3 参照).最終的に確率密 度関数 p(u, v) は以下の式で計算される.. cv p(u, v) = G(u, v) Θ. (10). は以下の式で計算される.. σij ≈. √. ) Φk. N. (. 1 cv. ). =. tmaxL dL. で計算される.. 4.3.3 Θ の上限値計算 VRL クラスタ L 内のすべての VRL 上の点 y(v) におけ る E の平面角 Θ の上限値を計算するために,L の AABB の重心と E を含む平面 P を考える(図 4(a)) .平面 P にお いて,E の端点を原点とし,E に平行な軸を x 軸,E に垂直 な軸を y 軸とする座標系を考える (図 4(b)).L の AABB 値をそれぞれ x0 ,x1 ,y0 ,y1 とする.VRL 上の点を P に投影 した際の座標を (x, y) とし,E の長さを s とすると,tan Θ は以下の式で計算される.. tan Θ =. する. K k=1. ). (11). 提案法では,σij を式 (11) の各項の上限値を用いて近似. (∑. 1 cv. (14). 内の点を P に投影した点の x 座標と y 座標の最小値最大. 式 (10) で表される確率密度関数 p(u, v) を用いると,g/p. g(u, v) 1 = Θfsu (u, v)fsv (u, v)Vˆ (u, v) p(u, v) cv. (. (13). Θ(x, y) =. sy x2 −sx+y 2. sy x2 − sx + y 2. (15). とし,x0 ≤ x ≤ x1 , y0 ≤ y ≤ y1 の. 範囲における最大値から Θ を計算する.詳細については. Appendix A で述べる. √ Θ fsu (u, v)fsv (u, v) Var[Vˆ ]. ⓒ 2017 Information Processing Society of Japan. 4.3.4 fsu の上限値計算 本研究では,位相関数 fs (θ) として Henyey-Greensten 関. 4.
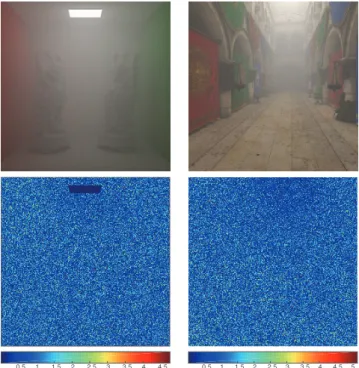
(5) Vol.2017-CG-168 No.8 Vol.2017-DCC-17 No.8 Vol.2017-CVIM-209 No.8 2017/11/8. 情報処理学会研究報告 IPSJ SIG Technical Report. !"#. %& "'* ( #$. ). あることが知られている [7] が,減衰率について分散を求. !$#. !"#$. -!!!"". %&. ,"'$. %& "'( #$. めることは難しいため,減衰率については上限値を用いる.. √ √ Var[Vˆ ] ≈ Tr (u)Tr (v)Tr (∥x(u) − y(v)∥) V ,"'* $ 減衰率 Tr (x) は x について単調減少なため,u, v, ∥x(u) −. %& "'+ ( #$. y(v)∥ の下限値を求める.このうち u の最小値は視線区間. 図 5 θu の計算. の視点に近い端点のパラメータ u の値,v の最小値は 0, !"#. !$# $%&'. ,++. !. "#. ∥x(u) − y(v)∥ の下限値は lbb と視線区間との最短距離で求. 234567589:35; "#. められる.. *++ -1( 0 ,++ -./ (%)'. *++. VRL クラスタ L に属するすべての VRL について,各. *++ -./ 0 ,++ -1( 図 6. VRL を包含する AABB を計算し,AABB の中心位置と. θv の計算. VRL の方向ベクトルからなる 6 次元ベクトル p を計算す る.p を包含する 6 次元の AABB を計算し,最も長い軸. 数を使用する.. fs (θ) =. 4.4 VRL のクラスタリングと分割. について AABB を 2 つに分割する.分割された 2 つの 6. 1 − g2 1 4π 1 − 2g cos θ + g 2. (16). 次元 AABB のどちらが p を含むかに基づいて VRL クラ スタ L を 2 つの VRL クラスタに分割する.VRL クラス. ここで g はパラメータで,g = 0 の場合等方散乱,0 < g < 1. タが 1 つの VRL からなる場合および視線区間は,各線分. の場合前方散乱,−1 < g < 0 の場合後方散乱となる.等. を半分に分割する.. 方散乱の場合,fs (θ) =. 1 4π. となるため上限値は容易に計算. できる.前方散乱の場合,fs (θ) は θ に関して単調減少,後 方散乱の場合は θ に関して単調増加となる.本研究では,. 5. 結果 本研究の結果を図 7 に示す.実行環境は Intel Xeon E5-. 前方散乱と仮定して,fs (θ) の上限値を求めるために θ の. 2670 2.60GHz,64GB RAM を搭載した PC で,レンダリン. 下限値を求める方法について述べるが,後方散乱の場合も. グするシーンは CornelBox シーンおよび Sponza シーンで. 同様に計算できる.. 行った.パラメータとして,信頼度を 95%,許容相対誤差. 図 5 に θu (u, v) の下限値 θu の計算方法を示す.図 5(a). ϵ を 2% として行った.CornellBox シーンでは VRL 数は. にある通り,VRL 上の点 y(v) から視線区間上の点 x(u) に. 約 22 万個,σs = 0.89, σt = 0.90, g = 0,Sponza シーンで. 入射して視点方向に散乱する散乱角 θu (u, v) は,u につい. は VRL 数は約 13 万個,σs = 0.0011, σt = 0.0012, g = 0.5. て単調増加する.そのため,視線区間の中で視点に最も近. としてレンダリングした.真値画像は,各 VRL からの寄. い端点のパラメータを u0 とすると,θu (u0 , v) < θu (u, v). 与をモンテカルロ推定 (16 サンプル) し,すべての VRL か. が成り立つ.そのため x(u0 ) での散乱角の最小値が θu と. らの寄与を累積して計算した.本稿では,VRL による散. なる.x(u0 ) から L の AABB 内の点へ向かう方向と視線. 乱光について着目しているため,散乱光 Lm についてのみ. 方向 ωo とのなす角の最小値 θu は Walter の方法 [12] を用. 誤差推定を行った.比較内容は真値画像との相対誤差と. いて計算することができる (図 5(b)).. し,図 7 下に相対誤差を可視化した図を示す.許容相対. 4.3.5 fsv の上限値計算. 誤差が 2% 以下のピクセルの割合は,CornellBox シーンが. 図 6 に θv (u, v) の下限値 θv の計算方法を示す.L の. AABB を lbb ,E の AABB を ebb とする(図 6(a)) .θv (u, v) は VRL の方向ベクトルと x(u) − y(v) とのなす角なため, まず,x(u) − y(v) が取りうる範囲を計算する.x(u) − y(v). 94.79%, Sponza シーンが 93.19% であり,提案法は精度よ く誤差を推定できている.. 6. まとめと今後の課題. が取りうる範囲は,lbb と ebb のミンコフスキー和によって. 本稿では,VRL を用いた関与媒質レンダリングのため. 計算される AABB に相当する.次に,L 内のすべての VRL. の誤差推定法を提案した.VRL クラスタと視線区間の組. の方向ベクトルから bounding cone を計算する.bounding. を層とみなして層化サンプリングを行い,真値との誤差を. cone と AABB とのなす角の最小値が θv となる (図 6(b)).. 推定した.VRL クラスタと視線区間における散乱光の輝. √ 4.3.6 Var[Vˆ ] の計算 Vˆ における可視関数 V (u, v) の分散の最大値 V は 0.25 で. 度の標準偏差を推定する手法を提案した.今後の課題とし. ⓒ 2017 Information Processing Society of Japan. て,非均質な関与媒質への応用および VRL によって照ら された物体表面での反射光の誤差推定が考えられる.. 5.
(6) Vol.2017-CG-168 No.8 Vol.2017-DCC-17 No.8 Vol.2017-CVIM-209 No.8 2017/11/8. 情報処理学会研究報告 IPSJ SIG Technical Report. [12]. Rendering, ACM Transactions on Graphics, Vol. 34, No. 6, pp. 210:1–210:12 (2015). Walter, B., Fernandez, S., Arbree, A., Bala, K., Donikian, M. and Greenberg, D. P.: Lightcuts: A Scalable Approach to Illumination, ACM Transactions on Graphics, Vol. 24, No. 3, pp. 1098–1107 (2005).. Appendix A. Θ(x, y) の上限値計算 まず,(x, y) と (x, −y) に対して E の平面角は同じなた め,y0 > 0 についてのみ考える.Θ(x, y) の偏微分は以下 の通りである.. ∂Θ(x, y) s − 2x = 2 ∂x (x − sx + y 2 )2 ∂Θ(x, y) s(x2 − sx − y 2 ) = 2 ∂y (x − sx − y 2 )2. (17) (18). x0 ≤ s/2 ≤ x1 の場合,x = s/2 の時が極大となり, ∂Θ(x,y) |x=s/2 ∂y 0.5. 1. 1.5. 2. 2.5. 3. 3.5. 4. 4.5. 0.5. 1. 1.5. 2. 2.5. 3. 3.5. 4. 4.5. 図 7 提案法による結果 (下図は相対誤差の可視化とカラーバー). 参考文献 [1]. [2]. [3]. [4]. [5]. [6]. [7]. [8] [9]. [10]. [11]. Dachsbacher, C., Krivanek, J., Hasan, M., Arbree, A., Walter, B. and Novak, J.: Scalable Realistic Rendering with Many-Light Methods, Eurographics 2013 - State of the Art Reports (2013). Engelhardt, T., Nov´ ak, J., Schmidt, T.-W. and Dachsbacher, C.: Approximate Bias Compensation for Rendering Scenes with Heterogeneous Participating Media, Computer Graphics Forum, Vol. 31, No. 7, pp. 2145– 2154 (2012). Walter, B., Arbree, A., Bala, K. and Greenberg, D. P.: Multidimensional Lightcuts, ACM Transactions on Graphics, Vol. 25, No. 3, pp. 1081–1088 (2006). Nov´ ak, J., Nowrouzezahrai, D., Dachsbacher, C. and Jarosz, W.: Virtual Ray Lights for Rendering Scenes with Participating Media, ACM Transactions on Graphics, Vol. 31, No. 4, pp. 60:1–60:11 (2012). Frederickx, R., Bartels, P. and Dutr´e, P.: Adaptive LightSlice for Virtual Ray Lights, EG 2015 – Short Papers, pp. 61–64 (2015). Huo, Y., Wang, R., Hu, T., Hua, W. and Bao, H.: Adaptive Matrix Column Sampling and Completion for Rendering Participating Media, ACM Transactions on Graphics, Vol. 35, No. 6, pp. 167:1–167:11 (2016). Nabata, K., Iwasaki, K., Dobashi, Y. and Nishita, T.: An Error Estimation Framework for Many-Light Rendering, Computer Graphics Forum, Vol. 35, No. 7, pp. 431–439 (2016). Keller, A.: Instant Radiosity, Proc. of SIGGRAPH ’97, pp. 49–56 (1997). Haˇsan, M., Pellacini, F. and Bala, K.: Matrix Rowcolumn Sampling for the Many-light Problem, ACM Transactions on Graphics, Vol. 26, No. 3, pp. 26:1–26:10 (2007). Ou, J. and Pellacini, F.: LightSlice: Matrix Slice Sampling for the Many-lights Problem, ACM Transactions on Graphics, Vol. 30, No. 6, pp. 179:1–179:8 (2011). Huo, Y., Wang, R., Jin, S., Liu, X. and Bao, H.: A Matrix Sampling-and-Recovery Approach for Many-Lights. ⓒ 2017 Information Processing Society of Japan. 5. は. ∂Θ(x, y) −s(s2 /4 + y 2 ) |x=s/2 = 2 <0 ∂y (x − sx + y 2 )2. (19). より,Θ(x, y) = Θ(s/2, y0 ) となる.. > 0 から Θ(x, y) < x0 < x1 < s/2 の場合, ∂Θ(x,y) ∂x Θ(x1 , y) となる. ∂Θ(x, y) s(x21 − sx1 − y 2 ) |x=x1 = ∂y (x2 − sx + y 2 )2. (20). となる.0 < x1 < s/2 の場合,x21 − sx1 − y 2 < 0 よ ∂Θ(x,y). り Θ = Θ(x1 , y0 ) となる.x1 < 0 の場合, ∂y |x=x1 √ の符号が y = x21 − sx1 で変わる可能性がある.y0 ≤ √ √ x21 − sx1 ≤ y1 の 場 合 ,Θ = Θ(x1 , x21 − sx1 ) と な √ る .y1 < x21 − sx1 の 場 合 ,Θ = Θ(x1 , y1 ) と な る . √ x21 − sx1 < y0 の場合,Θ = Θ(x1 , y0 ) となる. 同様にして,s/2 < x0 ≤ s の場合,Θ = Θ(x0 , y0 ) √ x20 − sx0 ≤ y1 の 場 と な る .s < x0 の 場 合 ,y0 ≤ √ √ 合,Θ = Θ(x0 , x02 − sx0 ) となる.y1 < x20 − sx0 の √ 場合,Θ = Θ(x0 , y1 ) となる. x20 − sx0 < y0 の場合,. Θ = Θ(x0 , y0 ) となる.. 6.
(7)
図
関連したドキュメント
In this case, the extension from a local solution u to a solution in an arbitrary interval [0, T ] is carried out by keeping control of the norm ku(T )k sN with the use of
In the second computation, we use a fine equidistant grid within the isotropic borehole region and an optimal grid coarsening in the x direction in the outer, anisotropic,
The dimension d will allow us in the next sections to consider two different solutions of an ordinary differential equation as a function on R 2 with a combined expansion.. The
The main purpose of this work is to address the issue of quenched fluctuations around this limit, motivated by the dynamical properties of the disordered system for large but fixed
The analysis of the displacement fields in elastic composite media can be applied to solve the problem of the slow deformation of an incompressible homogen- eous viscous
Applications of msets in Logic Programming languages is found to over- come “computational inefficiency” inherent in otherwise situation, especially in solving a sweep of
Shi, “The essential norm of a composition operator on the Bloch space in polydiscs,” Chinese Journal of Contemporary Mathematics, vol. Chen, “Weighted composition operators from Fp,
A Darboux type problem for a model hyperbolic equation of the third order with multiple characteristics is considered in the case of two independent variables.. In the class
