緊急時のスピン回避性能向上に関する一考察
8
0
0
全文
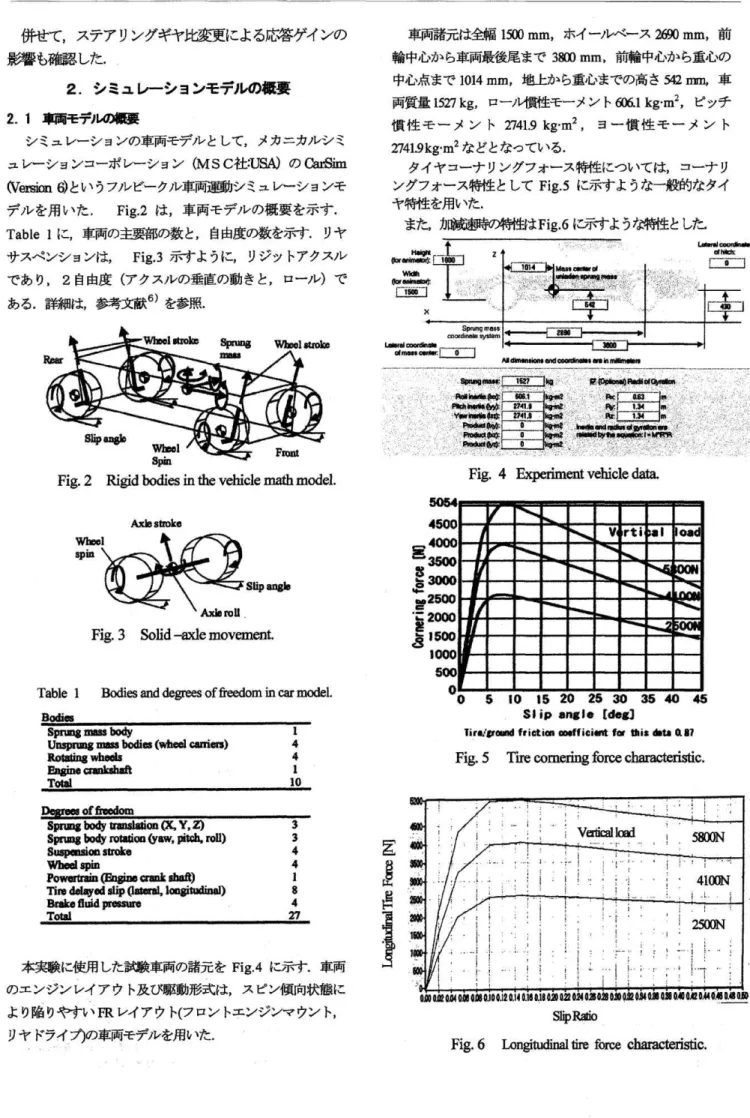
(2) 併せて,ス テア リングギヤ比変更 による応答 ゲイ ンの 影 響 も確認 した. 2.シ. 車 両 諸 元 は全 幅15001nm,ホ. 輪 中 心 か ら車 両 最 後 尾 ま で3800mm,前 中心、 点ま で1014mm,地. ミ ュ レー シ ョ ンモ デ ル の 概 要. 両 質 量1527kg,ロ 2.1輌. モ テリレの 概 要. ュ レー シ ョ ン コ ー ポ レー シ ョ ン(MSC社. カ ニカ ル シ ミ. 垣JSA)のG㎡. 血. ④ と い うフ ル ビー ク ル 車 両 運 動 シ ミュ レー シ ョン モ. デ ル を 用 い た.Fig.2は,車 Table1に,車. 両 モ デ ル の 概 要 を 示 す.. 両 の 主 要 部 の 数 と,自. サ ス ペ ン シ ョン は,Fig.3示 で あ り,2自. 由 度(ア. あ る.詳 細 は,参. 輪 中 心 か ら重 心 の. 上 か ら重 心 ま で の 高 さ 躍. 由度 の数 を示 す.リ. す よ う に,リ. ッチ. ー 慣 性 モ ー メ ン ト. ど とな って い る.. タ イ ヤ コ ー ナ リン グ フ ォ ー ス 特 性 に つ い て は,コ ン グ フ ォ ー ス 特 性 と してFlg.5に. ーナ リ. 示 す よ うな 一 般 的 な タ イ. ヤ 特 性 を用 い た. ま た,加 減 速時 の 特 性はFig.6に. 示 す よ うな 特 性 と した.. ジ ッ トア ク ス ル. ク ス ル の 垂 直 の 動 き と,ロ. 考 文 献6)を. ヤ. 274Lgkg・m2な. ㎜,車. ー一 ル 慣 性 モ ー メ ン ト606.1kg・m2,ピ. 慣 性 モ ー メ ン ト27419kg・m2,ヨ. シ ミ ュ レー シ ョン の 車 両 モ デ ル と して,メ. 輪 ㎞. イ ー ル ベ ー ス2690mm,前. ー ル)で. 参 照.. ` ,Wheelstroke. SprungW heheelstroke. Fig. 2. Rigid bodies in the vehicle math model.. Fig. 3. Table. l. spnnpmeur. I lbVtkQ,. •: 17490$14249AWM ,OGY,101.. PiodfiG.4grj:r0"' Pll0k4100. • •t5r1 m kriefpsrid/nd4M4ra^ats;? alwd byI,.p:.•.•. Fig. 4. Experiment. vehicle data.. Solid —axle movement.. Bodies and degrees of freedom in car model.. Bodies. Sprung mass body Unsprung mass bodies (wheel carriers) Rotating wheels Engine crankshaft Total. 1 4 4 1 10. Tiralgrcandfriction coefficient for this data O. Fig. 5. Tire cornering. force characteristic.. Degrees of freedom. Sprung body translation(X, Y, Z) Sprung body rotation(yaw, pitch, roll) Suspension stroke Wheel spin Powertrain (Engine crank shaft) Tire delayed slip (lateral, longitudinal) Brake fluid pressure Total. 本 実験 に使 用 した試 験 車 両の諸 元 をFig.4に. 3 3 4 4 1 8 4 27. 示す.車 両. のエ ン ジ ン レイ ア ウ ト及 び 駆動 形 式 は,ス ピン傾 向状 態 に よ り陥 りや すいFRレ イ ア ウ ト(フロン トエ ンジ ンマ ウン ト, リヤ ドライ ブ)の車 両モデ ル を用 いた.. ,. SlipRatio Fig. 6. Longitudinal tire force characteristic..
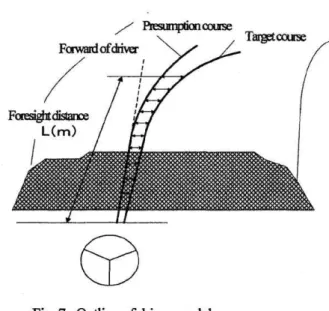
(3) I. ス リップ 角とス リップ比が 同時に付 加 され る場 合について は, 幡mの. コンバ イ ン ド特性 の計算 に基 づ き摩擦 楕円の概念 を. Target course. 用い て計算 を行 ってい る7).. Uc +. Amount of control (Steering wheel. Driver model. Vehicle response. Vehicle model +. 従 って,上 述 の摩擦 楕円の概 念を用 いてい るので,限 界コー ナ リング中に,加 速を行 な うと,加 速に よって後輪の横 力が減 少 してス ピン傾 向に陥った り,カ ウンターステアに よ り,ス ピ ン傾 向をコン トロール した コーナ リングを行 った りとい う,実 車 と同様 の限界 を越 えた領 域 の走 行シ ミュ レー シ ョンがで きる. 2.2ド. ライバ モデル. Fig. 8. 本 ドライバ モ デル(C紐Si切では,M舳mが. 制御 理論 を用 いた 自動 車 モデル を用 いて い る.(詳 文献8)9)を. Algorithm. of driver model.. 提 案 した最 適 細 は参 考 これ らの情 報 を元 に ドライバ は次 の行 動 を行 う.. 参照.). Fig7に 示す よ うに,ド ライ バ が予見 時間 にお ける 目標 コ ー スを認識 す る.予 見時間 は,予 見距 離 を車 両の速度 で除 し. ① 現 在 の車 両 の状 態 か ら,予 見 時 間内 にお け る車 両 の移 動軌. た もの であ る.ド ライ バ は 目標 コー スの認 識 と同時 に,現 在. ② 目標 コー ス と推 定 コー ス のず れ を最 小 にす る よ うに操舵 す. の車 両 の状態 量か ら予見 時間 内に車 両が 走行 す る と思われ る. る.こ の 際,ド ライ バ は コ ンプ ライ ア ン スス テ ア を あ らか. 軌 道(推定 コー ス)を推 定す る.こ の推 定 コー スは,ド ライ バ が体 で感 じる車 両 の状 態や前 方 視野 の流 れか ら予想 され る と 考 え られ る.そ して予 見 時間 内にお け る 目標 コー ス と推定 コ ー スの誤 差 を最 小 にす るよ うに操 舵制御 を行 う.. 跡 を推 定す る(コー ス推 定).. じめ予想 し,こ れ を加 えて操舵 をす るもの とす る. ③ ドライ バ の操舵 は,ド ライ バ の生 態 的 な反 応 遅れ 時 間 を考 慮 した. 本 ドライバ モデ ル は,コ ンプ ライ ア ンス ステ ア も定量 的に フ ィー ドバ ック して,コ ンプ ライ ア ンスス テア の分 だけ足 し 合 わせ て操 舵 して い る.理 由は,コ ンプ ライア ンス ステ アに よ って 生 じる誤差 を無 くす た めであ る.実 際 の一般 的 な ドラ. Presumption course. N ^. Forward__ __ .. /_. Target calm. イ バ を想 定す れ ば コンプ ライ アンス ステ ア を体 感 して フィ ー ドバ ックす るこ とは できな いか も しれ な いが,エ キスパー トドライバ は,車 の コンプ ライア ンス ステ ア も心碍 て操舵 し. r. 1;,. て い るか も しれ ない.い ずれ に して も,コ ー ス の追従 性 を重. Foresight&awe L(m). 視す るために,コ ンプ ライア ンス ステア も補正 して操舵 す る よ うに してい る. 次 に,ド ライバ モデル の式 につ いて,概 要 を示す. 推 定 コース の計 算 にお い て は,次 の よ うな状 態 変数 行 列 式 で表 現 してい る.. 餓+β"}(1) ここで,〃 Fig. 7. は ドライバ か らの操舵 角入 九. 状 態ベ ク トル κ. は,次 に示す.. Outline of driver model.. x1:現 在 の ドライ バ の 位 置 を原 点 と して ドライ バ の前 方 を X軸 Fig.8に 本 ドライバ モデル の アル ゴ リズム を示 す.目 標 コー スが ドライバ に与 え られ,そ れ と同時 に車両 の応答 が ドライ バ に フ ィー ドバ ック され る.こ れ らの応 答 は,絶 対座 標系 に. おける車両の前車軸中央の位置(Xr,}})と よび働 向巌(ろ (卿)と. り. 車両の前方向お. と輌 の ヨー角お よび ヨゆ イ ト. コンプライアンスステアσ。である.. に とる ドライバ 座標 系 にお け る,将 来 予想 され る車. 両重 心 の位置 のr座 標.現 在 の 車両重 心位 置 のr座 標 は 0と す る. κ2:ド ライバ 座標 系 にお け る,将 来 予想 され る車 両の 姿勢角 (ヨー 角膨).現. 在の車 両 の姿勢 角 を0と す る.. κ3:車 両の横 方向選渡,称 κ4:車 両の ヨー レイ ト,ψ 出力 ア は,ド ライバ座 標 系 にお け る,将 来予 想 され る ドラ イ バ のr座 標 を示 す.式(1)を オイ ラー積 分す る こ とに よ り,. 7. r.
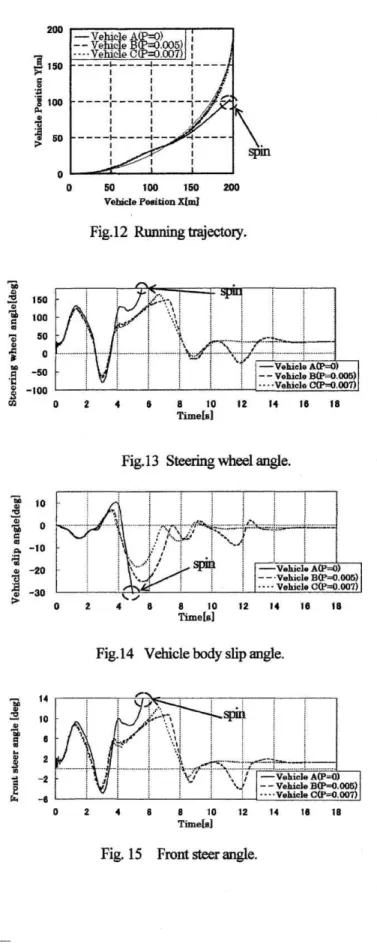
(4) 現在 の ドライ バ の位 置 を原 点 と して ドライバ の前 方 をX軸 とる ドライ バ座 標 系 にお いて,0か. に. ら予 見 時 間7ま で の 間 に. 移 動 す る ドライバ の位 置のr座 標 を求 めてい る(F培9). 目標 コー ス の計 算 にお い ては,絶 対座 標 系 の コー スデ ー タ のほ か に,ス ター ト地点 か らコー ス に沿 った距 離(3)を 定 義 した. 現 在 の道 の り3に お い て車速Kで. 走行 して い る時 点. で の,予 見 時 間 内 の 目標 コー ス の道 の り3∫紅&、 は㍉ 次 式 とな る. 3、 ,-3+'K7②. Fig. 10. 加. Block diagram of differentiation. steer assist system.. こ こ で,∫=1。.溜(=10) 目 標 コ ー ス の 道 の り8「,町&」 が わ か れ ば,こ. れ をデー タ こ こ》 蔦. (3,。Y,}り に 照 ら し合 わせ て,絶 対座 標 系 で の 目標 コー ス. ン グ ギ ヤ 比(=12),P:ア. (』「(3,紅9),r(畠 肛g))が 求 め られ る.従 っ て,現 在 の 車. P=0.005の. 照方). い,車 ㌦,=[「(8'ar部)一}}】C・S(の 一[x(3. ∬:操. 舵 角,2V:ス. シ ス ト定 数,δ ∬:操. シ ミ ュ レ ー シ ョ ン に はP冨0の. 両 の ヨー角 望 を用 い て,ド ライバ 座標 系 にお け る 目標 コー ス の横 ずiれ量 は,次 式 とな る.(Fig.9参. δ∫:前 輪 実 舵 角,δ. 車 両B,P鵠0.007の. 車 両A(ア. テア リ 舵 角速 度. シ ス ト無 し),. 車 両Cの3車. 両 ケー スを用. 両 が ス ピ ン傾 向 状 態 に 陥 る状 況 で,微. 分 操舵 ア シス. トが 車 両 に 及 ぼ す 影 響 に つ い て シ ミ ュ レー シ ョ ン を 行 っ た.. (3). 'ar9』')-2「。]sin(の. シ ミ ュ レ ー シ ョ ン に 用 い た コ ー ス をFig.11に Fig.11②. 本 ドライ バ モ デル は最 適 制御 を してお り,目 標 コース か ら. 示 す.. の 定 常 円 旋 回 レ ー ン チ ェ ン ジ で は 車 速1(瓦 ㎞lhと. 110㎞ 加 に つ い て,Fig11⑤. の ダブル レー ンチ ェン ジでは 車. 推 定 コー ス を差 し引い た誤 差 を予 見 時間 内 で最 小 にす る よ う 速130㎞hと1伽hで. に操舵 を行 ってい る.. こ こで,配:任. Drivercoat. inates. axis Y. T. シ ミ ュ レー シ ョン を 行 っ た.. 意 の重み付 け 関数. Ta t. _. (Ytarg,i) / (a)Tuningc me Flesurapfionalum. (Yi) Drivre ad'n ales ^ axisX. ig.9. Error between target course and presumption course in driver coordinates axis.. (b)Doublelawchangecause Fig.11. 2.3車. Running course.. 両 の操 舵方 式(微 分操 舵ア シス ト) 3.シ. 次 に微 分 操 舵 ア シ ス トの操 舵 方式 を式 〔5)に,ブロ ック線. ミ ュ レー シ ョン結 果. 定 常 円旋 回 レー ン チ ェ ン ジ の シ ミ ュ レ ー シ ョ ン結 果 は,. 図をFig.10に 示す.. 車 速110㎞ 血 の 場 合 をFig.12か. 1一. らFig15に. 示 す..
(5) 理 工 学 部 研 究 報 告. また,Fig.18の. Fig.12の 車 両軌 跡 を見 る と,微 分 操舵 ア シス トを付 加 し な い車 両Aは. 車 両Bは,前 車 両 を コン トロール で きず ス ピ ン して い る.し か し微 分 操 車 両Cは. 車 体 ス リップ角 では,前 輪実 舵 角 の位 相 の. わず か な違 い に よる影 響 が 顕 著 に表 れ て い る.車 両Aと. 急 操舵 を行 った際,ス ピン傾 向状 態 に陥 った. 舵 アシス トが付加 され てい る車両Bと. 第42号. 輪 実舵角(カ ウンター ステ ア〕 の あて戻 しのタイ. ミングカ纒 れ た こ とで,車 体 ス リップ角 が増 大 し,コ ン トロ ー ル不 能 に な りス ピ ン して い る.Fi魯16の 車両 軌跡 で は,. ス ピ ンを回. 避 し,元 の コー ス に復 帰 できて い るこ とが わか った.. 車 両Cは 微分 アシス トを付加 しな かった車 両Aに 比ベ オー バ ー シ ュー トが少 な く,安 定性 が高 ま るこ とがわ か った.. そ こで,車 両 挙動 の 時 系列 波形 に よ り,微 分 操舵 ア シス トの効 果 を,よ り詳 しく把 握 を行 った. Fig.13の 操舵 角 で は,急 操舵 を行 った こ とで発 散 してい る車 両Aに. 比べ,車 両Bと. 車両Cは. —Vehicle - - Vehicle - - - -Vehicle. カ ウ ンタース テア のあ. A=D) B ) .005 C ) .007. I I I J. て戻 しを上手 くコン トロール で き,収 束 してい る こ とが わ か った.こ の時車 両Cは,操. O M. 舵 の あて戻 しの回数 が車 両B I. よ りも少 な い.従 っ て,微 分 操舵 ア シス トの定 数 が大 きい. ~d. Al. と,ド ライバ のカ ウン ター ステ ア の コ ン トロー ル を よ り容 易 に収 束傾 向 にそ の度 合 い を強 める こ とが で き る こ とが わ か った. Fig.14の 車体 ス リップ角 にお いて は,車 両Aは10由gを 越 え ス ピ ン傾 向状態 に陥 っ た車 両 を コ ン トロー ル で きず に 発 散 してい るが,車 両Bと 車 両Cは,車. 体 ス リップ角1α ㎏. を越 え ス ピン傾 向状 態 に陥 った 車 両 を コ ン トロール し,一 定値 に収 束で きてい る.. rd ;d. 410C CO d. Fig.15の 前輪実 舵角 にお いて,車 両Bと 車 両Cは 微分 操. 5C. OC to. 舵 ア シ ス トの効 果 に よ って,微 分操 舵 ア シ ス トを付 加 しな い車 両Aに. 150. 対 して,前 輪実舵 角 の位 相 が進 む こ とが確 認 で. —Vehicle AtP--O) - - Vehicle B(P=0 .005) -- - -Vehicle CCP O.007). -50 -100. m. き た. Fig.13とFig.15の. 操 舵角 と,前 輪 実舵 角 の時系 列波形 を. 対 比 してみ る と,微 分 操 舵 ア シス トを加 え る こ とに よ り, 前 輪実 舵 角 の位 相 が進 み,そ の位 相 進 み に よ り,ス ピン傾 向状 態 の車 両 コ ン トロール に必 要 な前 輪 実舵 角 量 が低 減 す るこ とが わか った.. its. d. 10. •. 0. Rm Q, -10 m —Vehicle A(PO) - - Vehicle B(P0.005) - - - - Vehicle C(P=0.007). d -20 V. 以 上 に よ り,こ の よ うな,コ ーナ リング 中の 緊急 回 避 時. . -30. にお いて,車 体 ス リップ角10亡㎏ を越 え,明 らか にス ピン傾 向 に陥 った場 合 で も,微 分 操 舵 ア シス トを加 え る こ とに よ り,十 分,ス ピンは 回避 で き るこ とが わか った. ダ ブル レー ンチ ェン ジで の シ ミュ レー シ ョン結 果 は,車 速1伽hの. TB' 14 d 1 lit. 場 合 をFig.16か らFig.19に 示 す.. この走 行 で は,微 分 操舵 アシス トを付 加 しない車 両Aと, 車 両Bが. ス ピン し,車 両Cの. r, i t. み がス ピン しなか った.こ の m. 結 果 よ り,微 分操 舵 ア シ ス トが 高速 で 走行 す る車両 に及 ぼ. C-i 2. す 効果 を明 らか にす る ことが で きた.. G1,. Fig.19の 前輪 実舵 角 の グラフで は,車 両Bと. —Vehicle A(P0) - - Vehicle B(P-3.005) - - - Vehicle C(P~ .007). -t. 車両Cは 微. 分操舵 アシ ス トの効果 に よ り,微 分操 舵ア シス トを付 加 しな い車 両Aに 対 して前輪 実 艦 角の位 相が進む ことが確認 できた.. Fig. 15. Front steer angle..
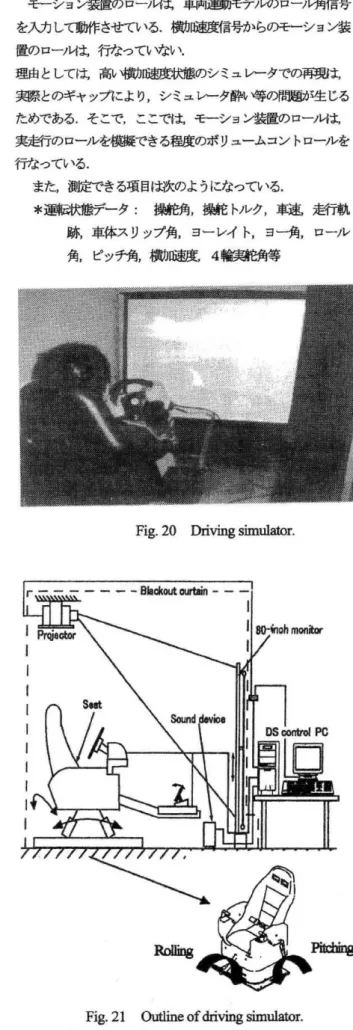
(6) 緊 急 時 の ス ピ ン回 避 性 能 向上 に 関 す る一 考 察 て. — Vehicle - - Vehicle -- -Vehicle. 2 0. A B C. =0) =0.005 =0 .007. モ ー シ ョン装 置 の ロー ル は. 車 両運 動 モ デ ル の ロー ノ 埆 信号. を入 力 して 動 作 させ て い る.横 加速 度 信 号 か らの モ ー シ ョン装 置 の ローノ玩ま,行 な っ て い ない 。. 3 8. 理 由 と して は,高 い 横 加速 度 状 態 の シ ミュ レー タ で の 再 現は, 実 際 との ギ ャ ップ に よ り,シ ミュ レー タ酔 い 等 の 問 題 が 生 じる た め で あ る.そ こで,こ. こで は,モ ー シ ョン装 置 の ロー ル は,. 実 走 行の ロール を模 擬 で き る程 度 の ボ リュ ー ム コ ン トロ「 ル を j. '. ,"J. 行 な っ て い る.. J •. —Vehicle A(P=0) - - Vehicle B(P=0.006 - - - Vehicle C(P=0.007. 1. ま た,測 定 で き る項 目は次 の よ うに な っ て い る. *運 転 状態 デー タ:操. 9' OD. 舵 角,操. 跡,車. 体 ス リ ップ 角,ヨ. 角,ピ. ッチ角,横. 舵 トル ク,車 速,走. 行軌. ー レイ ト,ヨ ー角,ロ. ール. 加速 度,4輪. 実 舵 角等. I•-1 -1. OA. •a. —Vehicle A(P0) - - Vehicle B(P=0.006) - - -Vehicle C(P=0.007). -,. 7. a. 9. —Vehicle A(P)) - - Vehicle B(P=0.005) - -Vehicle C(P=0 .007). Fig. 20. Driving simulator.. d- d 'a.. -1. a. z. Fig.19. 4.試. 験 結 果(ド. 4 Time[a]. 0. 6. a. Front steer angle.. ラ イ ビ ン グ シ ミュ レー タ に よ る. 確 認) 4.1試. 験 装 置(ド. ラ イ ビ ン グ シ ミ ュ レー タ)の 概 要. 本 研 究 に用 い た ドライ ビン グ シ ミュ レー タ(バ ー チ ャル メ カ ニ ク ス製 をベ ー ス に して い る)の 概 要 を 以 下 に示 す(Fig.20, Fig.21). ドライ ビ ン グ シ ミュ レー タの 車 両モ デル と して,2項. のシ. ミュ レー シ ョンモ デ ル と同様 に,メ カ ニカ ル シ ミュ レー シ ョン コー ポ レー シ ョ ン(MSC社:USA)の(圃mと. い うフル ビー. クル 車 両運 動 シ ミュ レー シ ョンモ デ ル を用 い た. シ ミュ レー タ は テ ム,走. 運 転 状 況 を再 現 す るた めに,視 界 映 像シ ス. 行時 の エ ン ジ ン音 等 の 車 内 音 発 生 シ ス テ ム,そ. して,. ロー ル と ピ ッチ の2自 由 度 の 運 動 が で き るモ ー シ ョ ン装 置 が 組 み 込 まれ て い る.. Fig. 21. Outline of driving simulator..
(7) 4.2被. 験者. 実験 の被 験者 はTable2に. 示 す よ うに,ド ライ ビング シ. ミュ レー タ及 び運 転 に 比較 的慣 れ た2名. と,ド ライ ビン グ. シ ミュ レー タ及 び運 転 に不慣 れ な2名 の計4名 で,10回. ず. つ 行 った. Table2Su切. 蹴. A. 晦棚. 暁. Hbwα. ㎞. ugeacar. C. M醜e㎞ 3 Mde㎞. Mle{h融. 1爲s㎞ 1. Mde㎞ 3. L鈴s伽 1. 臨胸. E鴫. A皿麟ae】 4.3試. B. ㏄t. D L爲s1㎞ 1 Mde㎞. 漉. 臨. 曲. 験結 果. ス ピン傾 向 を伴 う緊 急 回避 を模擬 した,ダ ブル レー ンチ ェ ンジ の場合 にお いて,微 分操 舵 アシス ト定数P=0《 微分 ア. (Subject C). シス トが無い 場合)と微分 操 舵ア シス ト定数 」P=0。007の場 合. Fig.. につ い て,ド ライ ビン グシ ミュ レー タ を用 い,走 行 確 認 を 行 な った.Hg22,F幽. は被験 者A,被. 果 を示す(車速 約100㎞hの. 場 合).各. 22. Experiment result of running ning trajectory with driving simulator.. 験 者Cの 試 験結. 被 験 者共,ほ ぼ 同様. の傾 向 を示 した.微 分 操 舵ア シス ト定数P=0.007の. 場合,. 、P=0(微 分 アシ ス トが無 い場 合)に 比べ,ス ピン傾 向 を コ ン トロー ル してい る時 の後 輪 の横 ずべ り挙動 は穏や か とな っ た.ま た,微 分 操舵 ア シス ト定数 、P=0.007の 場合,カ ウ ンター ス テ ア操 作 に対す る収 束 性 が 向上 した.一 方,微 分 操舵 ア シス ト定数P=0(微. 分 ア シス トが 無 い場 合),カ. ウ. ンター ス テ アが 間 に合 わず,急 激 とな り,収 束 す る こ とな く,車 両 はス ピン に到 った. Table3に,各. 被験 者 の実験結 果 の繰 り返 し性 を示 す.そ. の結 果 は,被 験者Aと 同様 に,ド ライ ビン グシ ミュ レー タ 及 び 運 転 に比 較 的慣 れ た被 験 者Bも 同様 の傾 向 を示 した. ま た,ド ライ ビン グシ ミュ レー タ及 び運 転 に不慣 れ な被 験 者B,被. 験者Cは,微. 分操 舵 ア シス ト定数1)℃.0α7の 場 合. で も,初 めの方 の1∼2回 が 間 に合 わずP=0(微. 目に おい て,カ ウン ター ス テ ア. 分 ア シス トが 無 い場 合)と 同様 にス. ピ ンに到 って しまっ た ケー ス が あ った が,被 験 者A,Bと ほ ぼ同様 の傾 向で あっ た. 従 っ て,微 分 操舵 ア シス トが,ス ピン傾 向 を伴 う緊 急 回. Fig.. 23. 避 時 の性 能向上 に有効 で あ るこ とが確 認で きた.. 5.ス. Experiment result of vehicle with driving simulator.. body slip angle. テ ア リングギヤ 比違 い によ る ドリフ ト円旋 回 Table. 黙. 3. Repetition. character. of experiment.. SubjectA. Subject B. Subject C. SubjectD. Always spin. Always spin. Always spin. Always spin. Always steady settling. Always steady settling. Steady settling :80% (Only 1st time and 2th time are snin.). ドライ ビング シ ミュ レー タを用 い,比 較 的慣 れ た ドライ バ2名 と不慣 れな ドライ バ2名 の計4名 で ステ ア リングギヤ 比(N)を15ρ,120,動0,75,60,30と. 変化 させ,実 舵 角 の. ゲイ ンが変 化す る影 響 につ い て実 験 を行 った.操 舵 特性 の 関 係図 をFig.24に 示す.. P4,t007. Steady settling :90%a (Only 1st time is snin.l..
(8) I. 緊 急 時 の ス ピ ン回 避 性 能 向上 に 関 す る一 考 察 て. 実 験 デー タは代表 例 として 比較 的慣れ た ドライバ1名 の操 舵角 と走行 軌 跡 をFig.25,Fig.26に 車両A(N司5の. 示す.通 常車両相 当 の. はカ ウン ター ステ アの あて戻 しを うま くコ ン. また,車 両F(N≒ 鋤 は,ス テ ア リン グギヤ比 を極 めて小 さ く したた め,走 行 を継 続 で き ない こ とが わ か った.走 行 軌 跡 にお いて も,車 両Aよ. りも,車 両Cの. 方が 長 く旋 回 を継. トロール で きず ス ピンア ウ トす るが,車 両(塒9.0)は ステ ア. 続 で き る こ とが わか っ た.車 両Fは,コ. リン グ ギヤ 比 を比 較 的小 さ く したた め,カ ウン ター ステ ア. し く低 下 したた め,す ぐに ス ピ ンア ウ トして しま うこ とが. を うま くコン トロール で き,ド リフ ト円旋 回 を走行 す る こ. わか った.. とが で きた.. 6.結. ン トロー ル 性が 著. 論. 緊急 回避 性能 の向上 に関す る一考 察 を行 なった. 30deg. そ の結 果,下 記 の結 論が得 られ た. (1)コ. 00 o b. ー ナ リン グ中 に緊 急 回避 を行 い車 両 が ス ピ ン傾 向. 状 態 に 陥 った場 合 に,微 分 操舵 ア シス トの効果 に よ り位 相. U on. が進 み カ ウ ンター ス テ アの 遅れ をカ バー で きる ので,ス. ピ. ン等 の不安 定 な挙 動 を 回避 で き,コ ン トロール 性,安 定 性 の 向上 が可能 となる こ と. (2)直. Time (s) Fig. 24. 線 走行 中の 緊急 回避 で は,微 分 操舵 ア シス トを付. 加 す る こ とで,オ ーバ ー シ ュー トも少 な くス ピ ンを 回避 し. Time —Front Steer angle.. 短い 時間 で安 定状態 に戻れ るこ と. ---------VehicleA (N=15.0) —-- —- VehicleC (N=9.0) VehicieF (N=3.0) ....... FR -0 u a) ao c co. (3)ス. テ ア リング ギヤ 比 を適 度 に小 さ くす る こ とで,応. 答 ゲイ ンが増 し,狙 いの カ ウン ター ステ ア角 に早 く達 す る こ とが で き る.こ れ は,位 相 を進 め る効 果 のあ る微 分 操舵 ア シス トと同様 に,後 輪 の ス ピ ン傾 向 を コン トロー ル す る. a) a). 際 に,効 果 的 であ るこ と.. i anC. 7.あ. a) a). とが き. 本研 究 では,緊 急回避 性 能の向 上手法 を検討 した.. In. 今後 は,更 に効 果 的な手法 につ いて検 討 を進 め,操 舵 ア シス トの望 ま しい方 向を追 及 して い きた い.. Fig. 25. 参考文献. Simulationresults (Gear ratio). ------------—. VehicleA (N=15.0) —VehiclaC (N=9.0) VehicleF (N=3.0) ........ 1)平 尾 収:自. 動 車 技 術 節(1)(1969)4&. 2)平 尾 収:自. 動 車 技 術20(11)(196の995.. 3)宮 森 章 広 ・中 谷 弘 能:自 技 会 前 刷 集 鰯(19吻101. 4)中 谷 弘 能:自. VehiclepositionX Em] Fig. 26. Running trajectory.. 技 会 前 刷 集 鰯(1994)133. 5) H.inoue and F.Sugasawa,Proceedingsof AVEC 'J2 (923047)(1992)258. 6) Y.Watanabe and M.W. Sayers, Proceedingsof 6th International Symposiumon AdvancedVehicleControl (2002)407. 7) PacejkaH.B.and SharpR S., VehicleSystemDynamics20 (1991) 121. 8) MacAdam,C.C., ASME 102 (3) (1980) 9) MacAdam,C.C.,IEEE Transactionon Systems,Man and Cybernetics 11(1981).
(9)
図

+3

関連したドキュメント
Keywords: continuous time random walk, Brownian motion, collision time, skew Young tableaux, tandem queue.. AMS 2000 Subject Classification: Primary:
n , 1) maps the space of all homogeneous elements of degree n of an arbitrary free associative algebra onto its subspace of homogeneous Lie elements of degree n. A second
Then it follows immediately from a suitable version of “Hensel’s Lemma” [cf., e.g., the argument of [4], Lemma 2.1] that S may be obtained, as the notation suggests, as the m A
This paper presents an investigation into the mechanics of this specific problem and develops an analytical approach that accounts for the effects of geometrical and material data on
The object of this paper is the uniqueness for a d -dimensional Fokker-Planck type equation with inhomogeneous (possibly degenerated) measurable not necessarily bounded
In the paper we derive rational solutions for the lattice potential modified Korteweg–de Vries equation, and Q2, Q1(δ), H3(δ), H2 and H1 in the Adler–Bobenko–Suris list.. B¨
While conducting an experiment regarding fetal move- ments as a result of Pulsed Wave Doppler (PWD) ultrasound, [8] we encountered the severe artifacts in the acquired image2.
Wro ´nski’s construction replaced by phase semantic completion. ASubL3, Crakow 06/11/06
