2016 年度 博士後期課程(ソフトウェア情報学)論文
海女仮想体験学習システムの開発と評価に関する研究
A Study on Development and Evaluation of the Female Diver Virtual Experience Learning System
岩手県立大学大学院 ソフトウェア情報学研究科
学籍番号 2362005008 細川 靖
研究指導教員 髙田 豊雄
土井 章男
村田 嘉利
蔡 大維
要旨
日本は四方を海に囲まれた海洋国家である.この海には「海女」とよばれる素潜りの潜水技 術文化がある.次世代の子供達に海女の潜水技術や文化を伝承するため,岩手県久慈市で活躍す る「北限の海女」をモデルに,仮想空間で海女のウニ漁を体験学習するシステム「海女 via」を 開発した.このシステムを用いて小学生らに出前授業を行ったところ,子供たちがシステム体験 をきっかけに「海女」に関して興味関心を持ったことが分かった.このシステムの仮想空間内で 学習者が潜水操作を行うインタフェースに,実装の容易さからジョイスティックを用いていた.
この操作はジョイスティックを倒すことで仮想空間の海に潜水するものであった.このため,海 女が潜水時に泳ぐ動作と乖離して,正しい潜水動作を学ぶことができず,直感的にも操作できな い問題があった.
そこで,海女の潜水動作を学ぶために,海女の探索時に行う平泳ぎの手を回す動作を検出する.
このために「海女 via」を基に,手を動かす動作を検出する赤外線センサを用いた潜水操作イン タフェースの実装と海女の潜水モデル適用を行った「海女via-R」を試作した.この「海女via-R」
により,学習者が手を動かす動作で仮想空間内に潜水可能とした.しかし,この潜水操作インタ フェースが試作のため児童には大きくて重く装着が難しい,児童の手が大人より小さいため赤外 線量が小さく検出されず潜水できない,手を振る動作のみで潜水ができてしまい大きく腕を回す 海女の動作とは乖離している等の問題が明らかになった.
この大きく腕を回す海女の潜水動作を検出することで,学習者が海女の潜水動作を正しく学ぶ ため,本研究では実際の海女の潜水動作を参考に小型センサユニットを付加した手袋状の潜水操 作インタフェースを提案・実装した.本研究では立位で正面を向き大きく腕を回す動作を「水掻 き動作」と定義して,その水掻き動作の検出を行う「海女via-W」を試作した.「海女via-R」と
「海女via-W」の水掻き動作回数の調査を行ったところ有意な差がみられ,「海女via-W」の平均
水掻き動作回数は「海女 via-R」に比べ減少し,実際の海女の動作回数に近づいた.このため,
学習者が手で水を掻く動作での直感的な潜水操作を可能としたことが分かった.
しかし,実際の海女の水掻き動作を学習者は知らないため,システムの操作補助者が学習者毎 に口頭や身振り手振りで動作を教える必要があった.この水掻き動作学習のため,「海女via-W」
には潜水動作学習チュートリアルを実装しているが,写真と文字のみの情報であるため,学習者 には手や腕の動作を見て学ぶことができない問題があった.
そこで,システムの学習者が海女のウニ漁の動作を見て学ぶことを可能とするため,水中にお ける海女動作のモーションキャプチャを提案した.通常モーションキャプチャは陸上で水平に行 われている.水中でのモーションキャプチャもプールで水平方向に行われている.これに対し本 研究で行うのは,海底から海面を泳ぐ海女を見上げて行うモーションキャプチャであるため,高
- 3 -
角度の垂直方向のモーションキャプチャとなる.このキャリブレーションのために,波に対する 強度と,塩に対する防錆を考慮し,アルミの 15mm角パイプを用いた立方体型の枠を試作した.
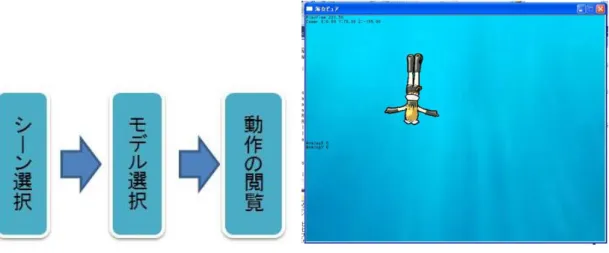
この立方体の各頂点にはキャリブレーション時の視認性を向上させるために青色 LED を付加し た.海では悪天候で実施できなかったが,プールにてこのキャリブレーション枠を用いて,「北限 の海女」の水中モーションキャプチャに成功した.このデータを基に海女の動作を容易に閲覧で きるモーションビューワー「AMAViewer」を試作した.この「AMAViewer」を用いて体験学習 会を小学生へ行ったところ,「AMAViewer」を見て動作練習した子供達の体験前後の海女の評価 は,「AMAViewer」を見なかった子供達に比べ52%も向上した.この事から,「AMAViewer」を 用いた動作練習により海女の潜水動作学習に効果があることが分かった.しかし,現状では
「AMAViewer」と「海女via-W」は別のシステムのため,一連で学習ができない.
今後は,「海女via-W」に海女の3Dモデルとモーションデータを用いて,海女の水掻き動作を学
習できるチュートリアルを付加し,海女の潜水動作を一連で学習できる,直感的な海女の潜水動 作学習システムへ発展させる予定である.
Abstract
Our country is a maritime nation surrounded by the sea. People who are skilled at free-diving and the culture of diving called "Ama" is very important in this area. We developed a virtual diving experience learning system of Ama who are Japanese traditional female fishing divers. This "Amavia" system simulates diving of Ama employed in the sea urchin fishery, in a virtual space. Since the joystick was used for the diving operation interface in the virtual space of "Amavia", there was a difference with an actual Ama's diving operation. For this reason, there was a problem whose the learner cannot grasp the right diving movement which cannot be operated intuitively.
So, in this study, in order to learn the diving movements of Ama, the "movement which turns a hand" for the breaststroke was detected. It is a movement performed while Ama is searching for sea urchins. Then, we performed the improvement in an actual feeling of
"Amavia", and lessened the weight. This system is called "Amavia-R". However, this diving operation interface had some problems for children. So, the operation which proposes and implements a glove-shaped diving operation interface, and swims in actual Ama as reference was used. This is called "Amavia-W." Children investigated the number of dives going to a depth whose one can pick up a sea urchin using the developed system. As a result, to
"Amavia-R", as for "Amavia-W", the significant difference was seen and the number of times of average operation decreased. This showed that intuitive diving operation was attained.However, as for this diving operation interface, the following problems became clear.
When using the system, the devices were heavy and bulky for children. Also, the amount of infrareds detected was small and cannot dive since children's hands are smaller than adults, and the movement of real Ama of pushing back and out which turns an arm greatly is difficult.
By detecting the diving movement of the Ama that turns an arm greatly, a learner can master a diving movement of Ama correctly. So, in this study, the diving operation interface in the form of a glove added a small sensor unit to help reference was proposed in the diving movement of Ama, and the implementation was performed. In this study, "Amavia-W" which detects the movement for which the learner who turned to the front in the standing position turns an arm greatly like "breaststroke" was proposed. When the count of a movement of the hand of the "breaststroke" of "Amavia-R" and "Amavia-W" was investigated, the significant difference was seen, and the count of a mean movement of "Amavia-W" decreased compared
- 5 -
with "Amavia-R", and approached the count of a movement of the hand of actual Ama. For this reason, it turned out that the learner was able to intuitively learn the diving actuation in the movement which displaces water by hand. However, since a learner did not know the movement of the hand of actual Ama, the research assistant of the system needed to teach the movement of the hand with speech or a gesture for every learner. Although the diving movement learning tutorial was mounted in "Amavia-W" for the learning of this hand and arm movement, since it was information only by photograph and text, the learner experienced problem, they couldn’t watch and learn a movement of hands or arms. Then, in order to enable the learner of the system to watch and learn a movement of the sea urchin fishery of Ama, motion capture of the underwater movement of Ama was proposed. Usually, motion capture is performed horizontally ashore. Underwater motion capture is also performed horizontally in a pool. On the other hand, in this study, Ama who swim from the sea surface to the sea-bottom looks up, and motion capture is performed. Therefore, motion capture is performed vertically with a high angle. For the calibration, a cube type frame using a 15-mm square pipe of aluminum was made to strengthen it against waves, and rust prevention by salt water. Blue LED was added in order to raise the visibility at the time of calibration in each vertices of this cube. Although due to significant weather, under water caption was not possible underwater, however motion capture of "Ama" was successful utilizing a pool using this calibration frame.
The motion viewer "AMAViewer" which easily allows viewers to watch the movement of Ama based on this data was made. When the experience learning meeting was held for schoolchild on using this "AMAViewer", the evaluation of children's movement Ama which watched
"AMAViewer" and carried out the practice of movement improved no less than 52% compared with the children who did not use the "AMAViewer." From this, the practice of movement using the "AMAViewer" showed that a diving movement learned of Ama was effective.
However, under the present circumstances, "AMAViewer" and "Amavia-W" has a problem that learning is impossible in a series for another system.
From now on, a 3D model and the motion data of Ama are applied to "Amavia-W", and the tutorial which can learn a diving movement of Ama will be added. It is planned to develop it into an intuitive system which can learn the diving movement of Ama in a series by it.
目次
1.背景 ... - 9 -
2.北限の海女と調査 ... - 11 -
2.1 小袖海岸の北限の海女 ... - 11 -
2.2 小袖海岸の北限の海女への着目と後継者問題 ... - 12 -
2.3 北限の海女に関する調査 ... - 12 -
2.3.1 北限の海女の漁の潜水撮影調査 ... - 12 -
2.3.2 海女の潜水道具調査 ... - 14 -
2.3.3 地域中学生による海女の調査 ... - 16 -
2.4 北限の海女のウニ漁の潜水動作定義 ... - 17 -
2.5 まとめ ... - 19 -
3.仮想体験システムやトレーニングシステムの先行研究と提案 ... - 20 -
3.1 直感的仮想体験システム ... - 20 -
3.2 直感的仮想体験学習システム ... - 20 -
3.3 研究目的:直感的な海女のウニ漁仮想体験学習システムの提案 ... - 21 -
3.4 まとめ ... - 22 -
4.仮想学習体験システム「海女via」試作と評価 ... - 23 -
4.1 北限の海女のウニ漁仮想体験学習システムのモデル ... - 23 -
4.2 海女viaシステムの仮想空間構築 ... - 24 -
4.3 海女viaシステム構成と処理手順 ... - 25 -
4.4 海女viaシステムの形成的評価 ... - 26 -
4.4.1 仮想空間リアルタイム性の評価 ... - 26 -
4.4.2 海産物採取行動の認知評価 ... - 26 -
4.4.3 角度情報の変化の評価と重みづけ改善 ... - 27 -
4.5 「海女via」操作系インタフェース装着化 ... - 28 -
4.6 イベント展示等での体験学習会と「海女via」アンケート調査結果 ... - 28 -
4.7 赤保内小学校での出前授業と「海女via」システムの総括的評価 ... - 30 -
4.8 海女フェスティバル等でのイベント展示と「海女via」システムの総括的評価 ... - 32 -
4.9 まとめ ... - 32 -
5.仮想学習体験システム「海女via-R」試作と評価 ... - 34 -
5.1 「海女via-R」における非接触操作インタフェース検討 ... - 34 -
5.2 海女のウニ漁の潜水モデル化と「海女via-R」への適用 ... - 35 -
- 7 -
5.3 「海女via」と「海女via-R」の比較アンケート調査 ... - 36 -
5.4 「海女via-R」の操作性改善検討と「海女via-Rv2」 ... - 37 -
5.5 「海女via-Rv2」を基にした操作記録機能実装と操作性の向上 ... - 38 -
5.6 「海女via-Rv3」における実装機能 ... - 39 -
5.6.1 記録・再生機能 ... - 39 -
5.6.2 チュートリアル機能 ... - 39 -
5.6.3 移動量の計算方式変更 ... - 40 -
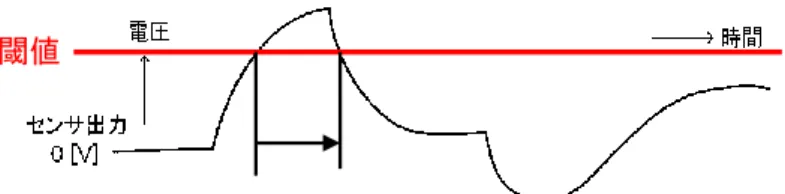
5.6.4 センサ閾値のキャリブレーション ... - 40 -
5.6.5 変化量の可視化 ... - 41 -
5.6.6 「海女via-Rv3」のアンケート調査 ... - 41 -
5.7 「海女via-Rv2」と「海女via-Rv3」を比較するアンケート調査 ... - 42 -
5.8 「海女via-R」考察と評価 ... - 43 -
5.9 まとめ ... - 43 -
6.仮想学習体験システム「海女via-W」試作と評価 ... - 44 -
6.1 「海女via-Rv3」潜水操作系インタフェースの問題提起 ... - 44 -
6.1.1 潜水操作系インタフェースサイズと重量 ... - 44 -
6.1.2 潜水操作系インタフェース装着時の困難性 ... - 44 -
6.1.3 手腕を動かすだけで潜水する操作と現実乖離 ... - 44 -
6.2 手袋型の装着センサを用いた潜水操作系インタフェース提案 ... - 44 -
6.3 水掻き動作のモデル化 ... - 45 -
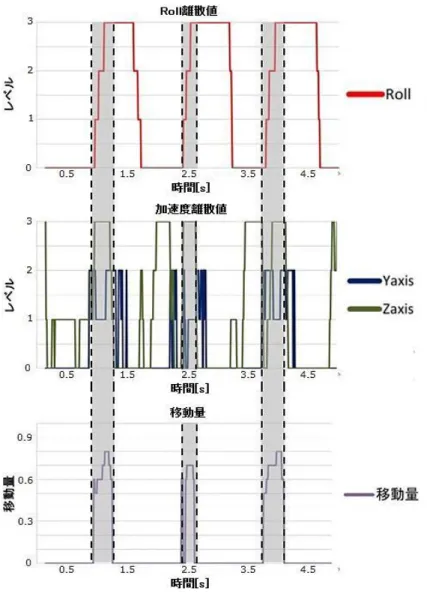
6.4 水掻き動作データの離散化 ... - 47 -
6.5 水掻き動作データの分析 ... - 48 -
6.6 移動量の算出 ... - 48 -
6.7 水掻き動作検出プログラムにおける妥当性の確認 ... - 50 -
6.8 「海女via-W」のアンケート調査と総括的評価 ... - 52 -
6.9 まとめ ... - 53 -
7.水中モーションキャプチャと海女潜水動作閲覧システム「AMAViewer」試作と評価 .... - 54 -
7.1 北限の海女の水中モーションキャプチャと潜水動作閲覧システム試作の目的 ... - 54 -
7.2 モーションキャプチャの先行研究 ... - 55 -
7.3 提案手法:海女の水中モーションキャプチャ ... - 55 -
7.4 海女の潜水動作と水中撮影 ... - 55 -
7.5 海女の潜水動作閲覧システム検討 ... - 56 -
7.6 海女の潜水動作閲覧システム実装 ... - 57 -
7.7 「AMAViewer」の初期評価 ... - 58 -
7.8 海女によるAMAViewer評価 ... - 59 -
7.9 AMAViewerを用いた子供たちの海女潜水動作学習の調査... - 60 -
7.10 海女によるAMAViewerを用いた子供達の潜水動作評価 ... - 61 -
7.11 考察 ... - 62 -
7.12 まとめ ... - 62 -
8.考察 ... - 64 -
8.1 北限の海女仮想体験学習システム「海女via」 ... - 64 -
8.2 北限の海女仮想体験学習システム「海女via-R」 ... - 64 -
8.3 北限の海女仮想体験学習システム「海女via-W」 ... - 64 -
8.4 海女潜水動作閲覧システム「AMAViewer」 ... - 65 -
8.5 まとめ ... - 65 -
9.まとめと展望 ... - 66 -
参考文献 ... - 67 -
関連(発表)論文 ... - 68 -
謝辞 ... - 69 -
- 9 -
1.背景
岩手県や青森県は農林水産業が産業の基盤となるほど重要である.交通の便の良い内陸地区で は児童が農林業の必要性を理解するための機会は比較的多い.しかし,三陸沿岸の漁業は,地理 的に交通が不便で受け入れが難しく,海上では船酔いや寒暖差が大きく児童には環境が厳しい,
水難事故などの危険,初心者の潜水は危険等の問題があり,容易に漁業の体験学習が行えない環 境にある.この漁業に関する情報のPR不足は大きな問題である.
本研究では,代表となる漁業のテーマとして岩手県久慈市小袖海岸で現在も続いている,北限 の海女に着目した.ウニやアワビ,コンブやワカメなどは三陸の特産品である.ウニを素潜りの 裸潜水漁で採取する北限の海女[1]のウニ漁は,小袖海岸の観光イベントとしても行われているが,
少人数で細々と行われているにすぎない.北限の海女の調査を進めると,三陸沿岸の水産業と同 様な問題として,海女の高齢化や若い後継者不在の問題があった.北限の海女は三陸特有の潜水 技術・文化であり,これを保護し,PRして後世に伝えていくことは重要な問題である.
これまでに,多くの仮想体験を可能にするシステム[2][3][4][5]やトレーニングシステム[6][7]
が提案されているが,海女やその潜水を対象としたものは開発されていない.そこで,本研究で は児童生徒に三陸の北限の海女の仮想体験,つまり,小袖海岸における海女のウニ漁体験学習の 機会を安全に提供することを目的とした体験型システムを提案[11][14]した.試作したシステムは,
児童生徒に興味や関心を持ってもらうため,子供たちが日頃見慣れた家庭用ゲームと似た画面構 成を採用した.次に,仮想現実技術を用いた海女体験学習システム「海女via」(以後,「海女via」
と略す)の操作インタフェースの装着化[12]を行った.しかし,システムの仮想空間内で潜水操 作を行うインタフェースにジョイスティックを用いたため,海女の潜水時の泳ぐ動作と乖離して いるという問題点があった.
手を動かして泳ぐ等の身体の動作を3次元的に計測しコンピュータに取り込む研究では,モー ションキャプチャが用いられており,画像による人物のトラッキングや姿勢推定,ジェスチャー 認識などで多くの研究が行われている[8].モーションキャプチャには,多数のカメラが必要で,
大型で高価設備が必要となるため,出前授業等のように移動してシステムを利用する「海女via」
には適用できない.そこで,手を動かして泳ぐ動作を検出して「海女 via」の仮想空間で潜水す るための操作インタフェースが必要となった.
これを受けて,本研究では「海女 via」の操作性や現実感向上を目的として,海女の潜水のモ デル化と,「海女via」において手を動かして泳ぐ動作の検出を行う潜水操作インタフェースの小 型軽量化と試作[13]を行い,これらを「海女 via-R」とした.「海女 via-R」により,システム学 習者は手をセンサ上で動かし,泳ぐ動作で仮想空間内での潜水が可能となった.しかし「海女
via-R」の潜水操作インタフェース重量が児童には重く,試作なので回路配線の取扱いに注意が必 要で装着が難しい,児童は手が大人に比べ小さいので赤外線量も小さく赤外線センサ値が小さい ため仮想空間で潜水できない,左右スイッチの誤操作などの問題があり,システム利用には常に 操作補助者が必要であった.また,センサ上で手を振るだけで潜水できる事やスイッチによるウ ニ採取等の動作不一致問題もあった.
本研究では,現実感向上のため,これまでの先行研究[11][12][13][14]で開発した「海女 via」
や「海女 via-R」の潜水操作インタフェースを改善する.北限の海女は手に手袋をはめてウニ漁
を行うので,海女と同様の手袋型の潜水操作インタフェースを提案する.小型センサユニットを 装着した手袋型の潜水操作インタフェースを用いて,小型軽量の潜水操作インタフェースを実装 した.この潜水操作インタフェースを用いて水掻き動作検出を行うことで,児童が水を掻く動作 で仮想空間内にて直感的な潜水操作を可能とし,これを「海女via-W」[15]と呼ぶ.
「海女via-W」にて児童らが手を動かして直感的に海女の潜水動作を学ぶことが可能となった
が,その動作を学ぶためのチュートリアルは写真画像とテキストのみで動きが無いため,システ ム体験時には操作補助者が学習者の手を取って動作をアドバイスする必要があった.海女は他の 海女の動作を見て真似て動作を学習しているので,北限の海女の潜水時の動作をモーションキャ プチャし,その動作を仮想空間で可視化して児童が動作を学ぶシステムの試作を行った[16][17].
動作を閲覧した水産高校教諭の評価でも,3次元的な動作を閲覧できることが評価された.また,
そのシステムを見て動作を練習することにより,海女の動作学習効果が確認できた.
本論文では,学習者が海女の潜水時の腕動作を学ぶことを目的とした,仮想体験学習システム の開発経緯とその評価について以後述べる.
- 11 -
2.北限の海女と調査
本章では,北限の海女と調査について述べる.初めに本研究で調査する小袖海岸の北限の海女 について述べ,次に小袖海岸の北限の海女への着目と後継者問題を述べる.そして北限の海女に 関する調査を示し,北限の海女のウニ漁の潜水動作定義を行う.最後に本章のまとめを述べる.
2.1 小袖海岸の北限の海女
海女とは裸潜水で巣潜りにて漁を行う女性の漁撈者をさす.酸素ボンベなどの潜水装置は一 切用いず,自分の息のみで潜る.この海女は日本と韓国のみに存在し,世界でも稀有な潜水技術・
文化である.海女の学校は存在しないので,海女は先輩や母親の潜りを見て,文字化された情報 ではなく経験から技術を習得してきた.世界的にも稀有な海女に関して,その生活や文化に関す る研究事例が殆どで,海女に関する技術教育の研究事例は報告されていないのが現実である.
岩手県久慈市小袖海岸は,我が国の太平洋沿岸において海女のいる北限[1]である.そこで,彼 女たちを北限の海女と呼んでいる.その服装は,以前は上半身裸であったが,現在は上着を着る ようになり,絣の半纏に赤い帯を締め,フゴミと呼ばれる木綿の短パンに,白の足袋を履いて,
白の手袋をはめ,頭に手ぬぐいをした後に磯メガネをして海に潜る.腰には,岩に硬く付着した ウニを取るために磯かぎをさし,ウニを入れるやつかりと呼ばれる網を下げている.北限の海女 の写真を,図2.1.1に示す.
図2.1.1 小袖海岸の北限の海女
素潜りの裸潜水によるウニ漁は,海藻であるコンブに絡まって窒息する危険,海流に流されて 岩へ衝突する危険がある.そこで,熟練した潜水の技術が必要である.北限の海女は,夏に海産 物を採取し,それを販売する.それは,主にウニやコンブである.ウニ漁実演の岸壁付近の場合,
1回の潜水は20~30秒ほどで,5~10個程度のウニを採取する.海面を泳ぎながら海底のウニ
を探索して潜水し,ウニ採取後浮上する.この動作をやつかりにウニがいっぱいになるまで繰り 返す.潜る深度はウニ漁を行う場所にもよるが,小袖海岸では5~6[m]程度である.
2.2 小袖海岸の北限の海女への着目と後継者問題
本研究では,教育や伝統技術伝承に主眼を置いた研究開発を提案し,テーマとして久慈市小袖 海岸で現在も観光産業として続いているTVドラマでも有名な「北限の海女」に着目した.三陸 のウニやアワビ,コンブやワカメなどは三陸地域の特産品であり,これらを素潜りで採取する北 限の海女は小袖海岸の観光として行われているが,岩への衝突や窒息コンブに絡まるなどの危険 があるため,少人数で細々と行われているにすぎない.北限の海女の調査を進めると,海女の高 齢化や若い後継者の不足という問題があった.TVドラマ放映後はアジアからの観光客が増加し,
国際的観光資源として重要性が高まっている.
現在,小袖海岸ではウニ漁の技術が変わり,組合主導で実施している.海女の漁業権は一戸あ たり一人に限定し,母と娘が一緒に海に潜ることはなくなった.昭和40年代に100人を超えて いた海女の数も年々減り,今では20人程度といわれ,主力の海女は50代と高齢化も進んでいる.
他地域の海女と異なり,7月から9月までのみの活動期間の制限がある北限の海女は,三陸特有 の潜水技術・文化であり,できるだけ早くこれを保護し,PRして後世に伝えてゆく必要性があ る.
2.3 北限の海女に関する調査
この節では,システムを実現する為に行った北限の海女の調査とその結果について述べる.
2.3.1 北限の海女の漁の潜水撮影調査
平成16年7月27日,システム構築に必要な情報を得るため,岩手県久慈市漁業共同組合並び に潜水撮影業者である(有)ダイブサービスアネシスの協力を得て,岩手県久慈市小袖海岸で活 躍する「北限の海女」のウニ漁やコンブ漁などの海産物採取作業の潜水撮影を行った.図2.3.1.1 に撮影した海女の海産物採取作業の様子を示す.潜水や浮上にかかる時間を比較するため,撮影 動画から一定の時間間隔でキャプチャした図で,左から右へ,上から下へ行くほど時間が経過し ている.図2.3.1.1より潜水は浮上より時間が掛かることが分かった.これは浮力に起因するた めと考えられる.他にも撮影した画像から海底地形の資料についても得ることができた.
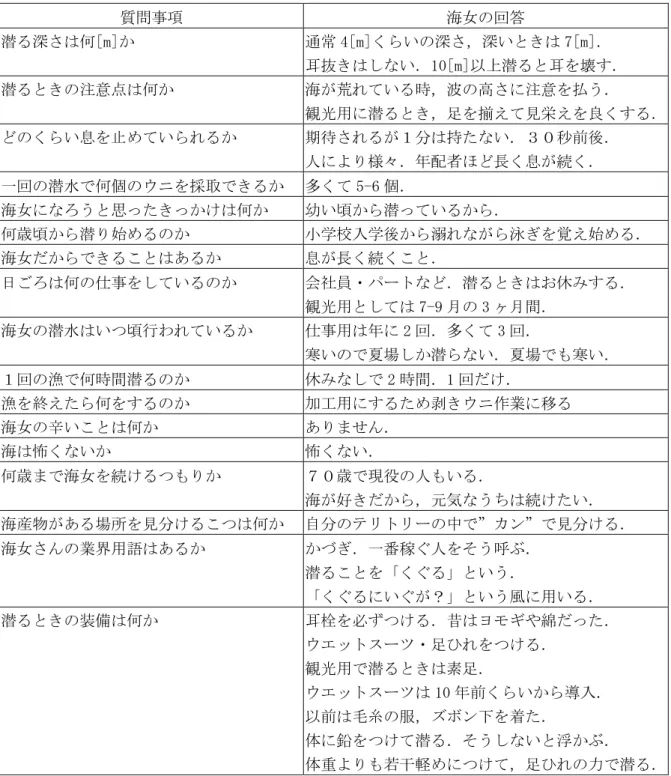
また,潜水時間等のシステム構築に当たって必要なパラメータ情報を得るために,夏場に海女 が常駐する「海女センター」にて海女に対して潜水に関するインタビュー調査も同時に実施した.
この際の質問と返答内容を表2.3.1.1に示す.この調査より,北限の海女が主に採取するウニは
- 13 -
「キタムラサキウニ」であることが分かった.これは種ウニを漁場に撒き育てていることによる.
また,天然物として1割程度「バフンウニ」も採取することが分かった.
図2.3.1.1 北限の海女の探索・潜水・海産物採取・浮上の様子
表2.3.1.1 海女にインタビュー調査した内容とその回答
2.3.2 海女の潜水道具調査
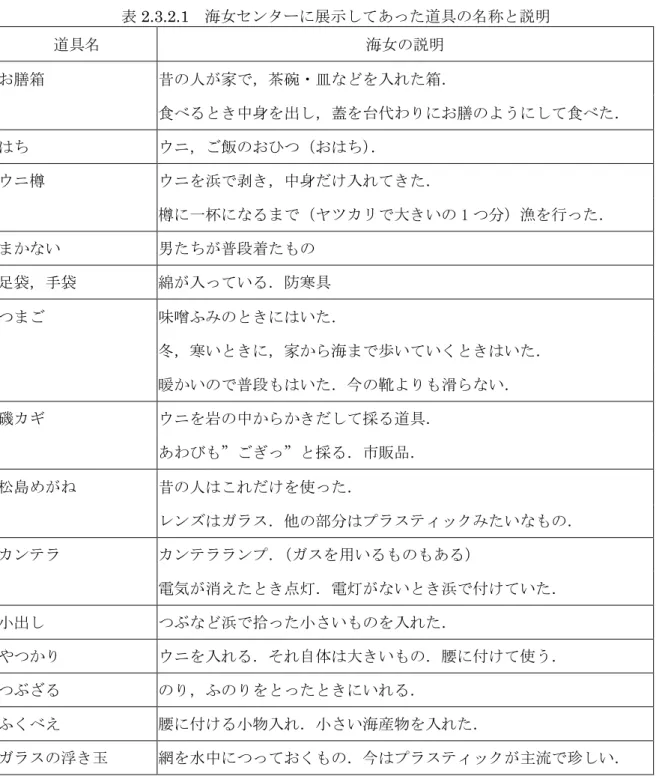
平成16年11月9日に,久慈市小袖海岸の海女センターを訪問し,海女センター展示してある 海女が用いている道具や,かつて用いていた道具の撮影調査を行った.図2.3.2.1に撮影した道 具の写真を,表2.3.2.1に道具についての説明を示す.海女が用いるほとんどの道具が手作りで ある.現在は素材がナイロン等に変わったが,縫って自分用に作っている.道具は購入ではなく,
自給自足が原則である.
質問事項 海女の回答
潜る深さは何[m]か 通常 4[m]くらいの深さ,深いときは 7[m].
耳抜きはしない.10[m]以上潜ると耳を壊す.
潜るときの注意点は何か 海が荒れている時,波の高さに注意を払う.
観光用に潜るとき,足を揃えて見栄えを良くする.
どのくらい息を止めていられるか 期待されるが1分は持たない.30秒前後.
人により様々.年配者ほど長く息が続く.
一回の潜水で何個のウニを採取できるか 多くて 5-6 個.
海女になろうと思ったきっかけは何か 幼い頃から潜っているから.
何歳頃から潜り始めるのか 小学校入学後から溺れながら泳ぎを覚え始める.
海女だからできることはあるか 息が長く続くこと.
日ごろは何の仕事をしているのか 会社員・パートなど.潜るときはお休みする.
観光用としては 7-9 月の 3 ヶ月間.
海女の潜水はいつ頃行われているか 仕事用は年に 2 回.多くて 3 回.
寒いので夏場しか潜らない.夏場でも寒い.
1回の漁で何時間潜るのか 休みなしで 2 時間.1 回だけ.
漁を終えたら何をするのか 加工用にするため剥きウニ作業に移る 海女の辛いことは何か ありません.
海は怖くないか 怖くない.
何歳まで海女を続けるつもりか 70歳で現役の人もいる.
海が好きだから,元気なうちは続けたい.
海産物がある場所を見分けるこつは何か 自分のテリトリーの中で”カン”で見分ける.
海女さんの業界用語はあるか かづぎ.一番稼ぐ人をそう呼ぶ.
潜ることを「くぐる」という.
「くぐるにいぐが?」という風に用いる.
潜るときの装備は何か 耳栓を必ずつける.昔はヨモギや綿だった.
ウエットスーツ・足ひれをつける.
観光用で潜るときは素足.
ウエットスーツは 10 年前くらいから導入.
以前は毛糸の服,ズボン下を着た.
体に鉛をつけて潜る.そうしないと浮かぶ.
体重よりも若干軽めにつけて,足ひれの力で潜る.
- 15 -
この取材の際,小袖海岸で聞こえる環境音を録音した.この音声は,小袖海岸で体験している 臨場感を高めるため,システムで海水面に浮上したときに再生する環境音として利用する.
なお,この調査は平成23年3月11日に発生した東日本大震災以前の調査であるため,図2.3.2.1 に示すこれらの漁具は,現在では流出して現存していない.
図2.3.2.1 平成16年度に海女センターに展示してあった漁具
表2.3.2.1 海女センターに展示してあった道具の名称と説明
道具名 海女の説明
お膳箱 昔の人が家で,茶碗・皿などを入れた箱.
食べるとき中身を出し,蓋を台代わりにお膳のようにして食べた.
はち ウニ,ご飯のおひつ(おはち).
ウニ樽 ウニを浜で剥き,中身だけ入れてきた.
樽に一杯になるまで(ヤツカリで大きいの 1 つ分)漁を行った.
まかない 男たちが普段着たもの 足袋,手袋 綿が入っている.防寒具 つまご 味噌ふみのときにはいた.
冬,寒いときに,家から海まで歩いていくときはいた.
暖かいので普段もはいた.今の靴よりも滑らない.
磯カギ ウニを岩の中からかきだして採る道具.
あわびも”ごぎっ”と採る.市販品.
松島めがね 昔の人はこれだけを使った.
レンズはガラス.他の部分はプラスティックみたいなもの.
カンテラ カンテラランプ.(ガスを用いるものもある)
電気が消えたとき点灯.電灯がないとき浜で付けていた.
小出し つぶなど浜で拾った小さいものを入れた.
やつかり ウニを入れる.それ自体は大きいもの.腰に付けて使う.
つぶざる のり,ふのりをとったときにいれる.
ふくべえ 腰に付ける小物入れ.小さい海産物を入れた.
ガラスの浮き玉 網を水中につっておくもの.今はプラスティックが主流で珍しい.
2.3.3 地域中学生による海女の調査
インタビュー取材した海女から,久慈市の中学生が海女の調査をしているという情報を得て、
平成16年12月10日に、岩手県久慈市立久慈中学校1年D組が行った海女のクラス班研究の様 子を取材した.中学生の視点で海女に関して何に興味を持ち、何を知りたいのかを調査した.身 近にある伝統的な仕事に関して,中学生が実際に北限の海女に質問した内容を表2.3.3.1に示す.
この訪問調査の際、中学生の班研究の発表タイトルにヒントを得て、以後本研究で試作するシス テムを「海女via」と呼ぶこととした.viaはvirtual interface for aquanautの頭文字を取った 略記である.
- 17 -
表2.3.3.1 久慈中学校の1年D組生徒による北限の海女への質問事項
1 班 班テーマ「現在の海女」
苦労していること、困っていることは何か 何が一番良く採れるのか
1 日に採れる量はどのくらいか
2 班 班テーマ「伝説の海女」
今まで伝説になるようなことをした海女さんはいますか 海女さんの最高齢と最年少を教えてください
一番たくさんアワビやウニを採った人は、どのくらい採ったのですか 漁は、いつも何人くらいでやるのか
3 班 班テーマ「海女の歴史」
海女センターはいつできたのか
海女は最初どのくらいの人数で始まったのか 海女は何年前からいるのか
一番最初の海女が潜った場所はどこか
海女の仕事は何歳くらいからできて、何歳くらいでやめるのか 休みの日は何をしているのか
4 班 班テーマ「海女になるまで」
海女になるまで掛かる期間 海女になるために必要なこと
何分くらい潜っていられるのか.1 日に何時間くらい潜るのか 海女も溺れることがあるのか
なぜ、海女になろうと思ったのか
5 班 班テーマ「ウニ・アワビ」
久慈ではどんな種類のウニ、アワビが採れるのか(何種類か)
採ったときに死んでいるものはあるか.あったらどうするのか おいしいウニやアワビの見分け方があるのか
ウニ、アワビがよくいる場所はどんなところか ウニ、アワビを上手にとる方法
ウニやアワビのほかに何を採るのか
ウニ、アワビを使ったおすすめの料理は何か
6 班 班テーマ「これからの海女」
海女をやりたい人がいなくなったら、誰が海女をやるのですか 今、海女の人数はどのくらいなのですか
男の人は海女の仕事をやってはだめなのですか
2.4 北限の海女のウニ漁の潜水動作定義
北限の海女は,裸潜水で巣潜りにて漁を行う.このウニ漁の潜水の動作は,陸上でジャンプし て斜めに落下して水面に進水し平行に進む競泳などのプールで行われる潜水とは大きく異なる.
この潜水法は我が国独特のものと認識され「大和潜り」と呼ばれる[1].この「大和潜り」は平泳
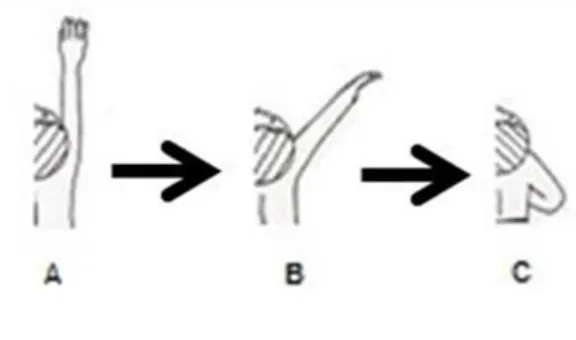
ぎの泳法である巻き足で,「朝鮮潜り」はバタ足であると言われている.そこで,本研究では「大 和潜り」の北限の海女の潜水動作を図2.4.1に示すように,①「探索」,②「潜水」,③「採取」,
④「浮上」の4段階と定義する.
図2.4.1 海女のウニ漁の潜水動作分類
①の「探索」では,平泳ぎの泳法で,水中メガネを海底に向けウニを探す.潮に流されないよ うに泳ぎながら海底のウニを探している段階である.
②の「潜水」では,探索して発見したウニを目指して,平泳ぎから腰を曲げて上半身を海底方 向へ向け,倒立のように下半身も垂直にして,海面から出た下半身の重量と大きく手で水を掻く ことで,海底へ向かって垂直に潜水する段階である.体をくの字に曲げることから,一般的には
「ジャックナイフダイブ」と呼ばれている.潜水撮影した動画像より,北限の海女は小袖海岸で は深さ約5[m]を5秒間程度で潜水し,その時に手を掻く回数は5回であった.このことから1 回手を掻くと約1[m]潜水し,潜水速度は1[m/秒]程度であることがわかった.スキューバダイビ ング等の潜水に比較し速いことが分かる.
③の「採取」では,目的のウニを採取するために,足で水を掻きながら,手袋をはめた手でウ ニを採取する.岩について取れない際には腰に挟んだ「カギ」とよばれる磯カギで剥がし,手で 採取する.ウニを沢山採取するには,潜水回数と1回あたりの採取数を増やす必要がある.そこ で,体力を温存しためには,潜水時間の短縮が必要である.海女は酸素ボンベを用いないので,
息が長くは続かない.このため海底での採取時間は短く,海産物の収穫網である「ヤツカリ」に 入れず,手に持ったまま浮上する場合もある.
- 19 -
④の「浮上」では,海面を向き,岩を蹴って,その反動でゆっくりと浮上する.浮上が早すぎ ると耳を傷めてしまうためと,手にウニを持っている場合があるため,あまり手で水を掻くこと はない.急がずに浮力に任せて海面まで浮上する.
本研究では,前述のように今後海女のウニ漁を①「探索」,②「潜水」,③「採取」,④「浮上」
の4段階と定義して述べる.
2.5 まとめ
本章では,岩手県久慈市小袖海岸で活躍する北限の海女について,初めにその概要を述べ足ひ れを使わない素潜りで,1回の潜水が20~30[秒]で,5~6[m]ほど潜水することを述べた.次の,
小袖海岸の北限の海女への着目と後継者問題では,三陸特有の稀有な北限の海女への着目の経緯 を述べ,現在の北限の海女が抱える後継者問題について,海女が20名程度に減少していること と若くても50歳代と高齢化が進んでいることを述べた.また,北限の海女に関する調査では,
採取するのは「キタムラサキウニ」であることと,北限の海女の漁の潜水撮影調を行った経緯と,
潜水撮影で得た海女の画像を示し,インタビュー調査の結果を示した.海女の潜水道具調査では,
海女センターに展示されていた漁具の画像とその詳細を示した.また,久慈中学生の北限の海女 の地域研究調査により,中学生が海女のウニ漁や後継者問題にも興味関心を持っていることを示 した.北限の海女のウニ漁の潜水動作定義では,北限の海女のウニ漁を「探索」,「潜水」,「採取」,
「浮上」の4段階に定義を行った.
3.仮想体験システムやトレーニングシステムの先行研究と提 案
本章では,本研究の位置づけとして,これまでの仮想体験システムやトレーニングシステムの 先行研究の一例として,直感的仮想体験システムについて述べる.次に,直感的仮想体験学習シ ステムについて述べ,本研究の目的となる直感的な海女のウニ漁仮想体験学習システムの提案を 行う.最後に本章のまとめを述べる.
3.1 直感的仮想体験システム
仮想現実技術とは,コンピュータグラフィクスを用いてコンピュータ上に仮想空間を再現し,
コントローラ等の操作インタフェースを通して人間が仮想空間に影響を与えることで,あたかも 現実で体験しているかの様な感覚を得る技術のことであり,バーチャルリアリティーやVRとも 呼ばれる.現実で行うと危険がある場合や,手順が複雑である等の理由で実現が困難である事案 を仮想的に体験することが出来るという面で,医学分野での学習システムや,自動車・電車・航 空機等の運転を体験するシミュレータ,ビデオゲームなどに幅広く利用されている.この例を図
3.1.1に示す.この仮想体験システムでは,前面に仮想空間が表示されるディスプレイが搭載され
た球型の筐体に入り,操縦桿を操作することで直感的にロボットの操縦を体験することが出来る.
図3.1.1 仮想現実を用いたビデオゲーム
※画像は「機動戦士ガンダム 戦場の絆」より引用[9]
3.2 直感的仮想体験学習システム
仮想現実技術を用いた学習システムに,医療分野における手術シミュレータがある.医療手術 は失敗が患者の生命に直接結びつくため,十分な技術と経験が必要であるが,人体を利用した訓 練は不可能であり,動物を利用した実験も動物愛護の観点から困難なものとなっている.そこで,
- 21 -
仮想現実技術を利用し人体の構造をシステム内に再現し,手術に用いる専用器具を模した操作イ ンタフェースを実装することで,手術中の人体の様子を3次元空間位置として理解し,視覚と器 具操作の強調を実際に体験しながら直感的に学習することができる.図3.2.1に示すのはその一 例で,ラップブイアールと呼ばれるVR内視鏡手術トレーニングシミュレータである.
図3.2.1 VR内視鏡手術トレーニングシミュレータ
※画像は「ラップブイアールVR内視鏡手術トレーニングシミュレータ」より引用[10]
3.3 研究目的:直感的な海女のウニ漁仮想体験学習システムの提案
これまで述べたような,ビデオゲームや医療のトレーニングシミュレータでは仮想現実技術を 用いたシステムがこれまで多数提案されている.これに対し,海女の素潜りによるウニ漁を仮想 体験学習できるシステムは提案されていない.また,2.3.3項で述べたように地域の中学生らも海 女のウニ漁に学びたいというニーズがある.そこで,本研究では,地域に固有の「北限の海女」
の潜水の伝統文化を次世代の子供達に継承するため,仮想現実技術を用いた小袖海岸における海 女のウニ漁体験学習の機会を安全に提供することを目的とした体験型システムを提案する.この 体験型システムは児童生徒を主に対象とするため,直感的な操作によってウニ漁の仮想体験を実 現することを目的とする.また,このシステムを実際に出前授業等で展示し,体験学習会を実施 してシステムを体験した学習者の評価を基にシステム改善を行うこととする.
3.4 まとめ
本章では,仮想現実技術を用いた仮想体験システムやトレーニングシステムの先行研究につい て述べた.仮想現実技術を用いた直感的な仮想体験システム例としてビデオゲームの戦場の絆を 示した.また,直感的なトレーニングシステムの例として,VR内視鏡手術トレーニングシミュ レータを示した.そして,本研究の目的とする直感的な海女のウニ漁仮想体験学習システムの提 案を行った.
- 23 -
4.仮想学習体験システム「海女 via」試作と評価
本章では,海女は後継者不足により自分達の伝統文化が継承されなくなることを危惧している.
子供たちに「海女」を知ってもらい,その泳ぎ方や潜り方,海底の様子など伝えたいと希望して いる.しかし,海女には直接子供達へ語る機会が無い.
最後に本章のまとめを述べる.
4.1 北限の海女のウニ漁仮想体験学習システムのモデル
海女のウニ漁仮想体験システムの構築を行うため,システム学習者が仮想の海女となって,仮 想空間内での潜水と海産物採取を行うモデルを提案[14]する.これを図4.1.1に示す.このモデル では,仮想空間内での海女の移動を実現するため、頭部の位置や角度変化量を加速度ベクトルと して入力して計算し,座標や角度に適用する.潜水時の空気消費量の変化を次のように実現する.
このシステムでは,潜水時間や移動による空気の消費量などをリアルタイムにシミュレーション する.海女の深度や移動の加速度ベクトルの大きさに応じて、空気の減少量を増加させる.児童 生徒を主対象とするため,空気が無くなると安全のため海女を強制的に浮上させることとする.
浮力を実現するため、常に上方向の微小な加速度ベクトルを加算する.海産物の採取行動を実現 するため、海産物の採取動作の後は採取済みの海産物を仮想空間から消去する.
図4.1.1 ウニ漁仮想体験学習システムのモデル
4.2 海女viaシステムの仮想空間構築
仮想空間の構築には、一般に普及しているマイクロソフト社のWindowsPCでの動作を想定し、
オーディオ、グラフィックス、入力デバイスの制御が組み込まれているDirectX9.0 APIを利用し て開発を行った[14].
海底を形成するオブジェクトとして岩、ウニ、アワビ、ワカメ、コンブ等が挙げられる.また,
生物としてはウニや海藻以外に魚もある.これらのオブジェクトは仮想3次元空間では、座標、
角度、縮尺やDirectX用の多数のパラメータを持つ.そこで,オブジェクト指向のプログラミン グを用いた.仮想空間の表示にはモデル計算と描画を1/30秒毎に実行するように実装を行った.
開発言語にはVisualC++6.0を用いてシステムを実装した.
初めて体験する学習者でも理解を容易にするため,表示する仮想空間に認識できる情報を加え た.ウニが海底のどの位置に存在するか,海女は経験的に学習している.そこで,海産物の位置 表示機能を実装し,事前知識が無くともウニ等の海産物の位置を探査を可能にした.また,潜水 時の空気残量や,潜水深度,船の方向を示すコンパスも画面表示することで,海女が経験的に体 得している情報を,仮想体験システムの表示画面から学習者が理解できるようにした.
北限の海女は,1回の潜水で数個から10個程度のウニを採取する.ウニ漁の評価として,時 間内に採取した海産物数を表示し,学習者が実際の海女と比較することで自己評価できるように した.また,詳しい説明が無くても短時間にシステム操作を理解できるように,子供たちが日頃 見慣れている,ビデオゲームのような画面デザイン手法を用いた.この画面例を図4.2.1に示す.
図4.2.1 海女viaシステムの仮想空間画面例
- 25 -
4.3 海女viaシステム構成と処理手順
海女viaシステムの入出力インタフェースの構成として,図4.3.1に示す構成を提案する.
ジャイロセンサで頭部の角度情報を取得する.ジョイスティックを倒すことで移動や潜水の行動 を行う.ウニなどの海産物の至近距離まで近づいたら,ジョイステッィクのボタン押すことで海 産物の採取行動を行う.仮想空間は、没入型のヘッドマウントディスプレイ(HMD)上に表示する.
ただし、上記の構成は非常に高価なので、一般的なPCのみでも実行できるように,キーボード・
マウスによる操作も実装する.
システムのデータ・処理の手順は以下の通りである.
1)3軸の角度を取得するジャイロセンサにより頭部の角度情報を取得する.
2)操縦桿のようなジョイスティックで移動・海産物採取等の行動を入力する.
3)1)並びに2)から得られた情報をPCで計算し、仮想空間に反映させる.
4)計算された仮想空間をメガネのように装着するディスプレイであるヘッドマウントディス プレイに投影する.
5)1)へ戻って処理を繰り返す
本システムでは、以下の製品を用いてシステムを構成した.
・ジャイロセンサ :Intersense 社 InterTrax2
・ジョイスティック :マイクロソフト社 SideWinder
・ヘッドマウントディスプレイ :Cybermind 社 i-visor DH-4400VP
本研究で開発したシステムを「海女via」と呼ぶ.この海女viaのシステム構成を図7に示す.
図4.3.1 海女viaシステム構成
4.4 海女viaシステムの形成的評価
本節では,試作した海女viaシステムの形成的評価を行う.初めに実現した仮想空間のリアル タイム性の評価を行う.次に,ウニ採取行動の認知評価を行う.
4.4.1 仮想空間リアルタイム性の評価
PCの処理能力が高速な分には、1秒間に画面を書き換える回数(以後、フレームレートと略す)
は33回が上限で固定されており、滑らかに表示させることができる.処理性能差を比較するた め用意した2台のPCの性能を表4.4.1.1に示す.
表4.4.1.1 海女viaにおける仮想空間表示のフレームレート
グラフィックス強化自作 PC (A) EPSON Endeavor NT2700 (B)
クロック周波数 Intel Pentium4 3GHz Intel PentiumM 1.4GHz グラフィックカード RADEON X800XT PE オンボード
ビデオメモリ 256MB 64MB
メモリ 1024MB 512MB
フレームレート 30 20
備考 タワー型 PC ノート型 PC
描画速度を比較するため、1秒間に画面を書き換える回数を計測した.表4.4.1.1に示すように,
Aのフレームレートが30フレーム/秒になるプログラムをBで動作させると、20フレーム/秒 になった.そこでフレームレートを維持するため、Aと比べ仮想空間内で視認できると判定して 物体を描画する距離を半分にしてBで再度実行したところ,30フレーム/秒のフレームレート を実現することができた.滑らかにシステムが動作しているように学習者に見せるためには、フ レームレートの最低値を30フレーム/秒以上にする必要がある.結果としてリアルタイム性の 観点から十分な結果を得ることができたと考えられる.しかし、物体を描画する距離をAに比べ てBでは半分にしたことから,境界をぼやかしたようにする霧を短い距離でかけ、濁りが濃い海 表現となり現実と乖離してしまった.処理能力の低いPCではフレームレートが落ちて現実感が 欠けてしまうので、実行には処理能力が高いPCで実行することが望ましいことが分かった.
4.4.2 海産物採取行動の認知評価
海女viaではウニ漁を仮想体験するため,ウニ採取が学習者の行動目標となる.その仮想空間 にてウニなどの海産物を学習者が採取した際,その海産物を仮想空間から消去する必要がある.
- 27 -
海女のウニ採取は,手袋をはめた手でウニを掴みヤツカリへ入れる事で行う.この動作を仮想空 間で表現できることが望ましいが,海女viaでは人体の3次元モデル表示を実装できていないた め,表現ができない.そこで海女の手でウニ採取する表現が無いまま,採取時にウニのみの消去 を行うと,視点から見失ったのか,ウニを採取したのか判断できないことが多かった.
そこで,海産物を採取した際には、図4.4.2.1に示すようなグラフィック効果と採取効果音を 発生させた.これによって,海女がウニを掴む動作表現が無くとも,学習者へウニ採取したとい う行動結果を認知させることができたと考える.
図4.4.2.1 ウニ採取のアニメーション効果
4.4.3 角度情報の変化の評価と重みづけ改善
海女は水中では、視線角度変更を頭部及び体全体を用いて行うが、陸上で座ってHMDを装着 しているので頭部のみの動きに限定される.このため、ジャイロセンサで取得した頭部の角度情 報を直接に仮想空間の視線角度に適用すると大きく頭を振る必要がある.この動作は体勢として 辛いため視野が狭くなり操作が難しくなってしまった.
実際に海女にHMDを装着してシステム体験して頂いた際に,「首を振っても見える範囲が狭 い」という意見を得た.そこで、頭部の視線角度変更の不足分を補うため、ジャイロセンサで取 得した角度変化を図4.4.3.1のように2倍に値を重みづけして仮想空間に適用するように改善し た.
図4.4.3.1 角度変化情報を2倍にして仮想空間へ適用
ジャイロセンサの 値を直接反映
ジャイロセンサの角度 変化量を2倍に適用
4.5 「海女via」操作系インタフェース装着化
「海女via」では頭部にジャイロセンサを装着してシステムを被験した場合,センサ入力角度
を直接適用するよりも値を2倍にした方が被験者が操作し易いという結果が得られている.これ はジョイスティックが固定されているので,頭の可動範囲が限られてしまうためである.頭の向 きを変えながら,固定されたジョイスティックを操作するのは難しい.例えば仮想空間で右方向 を向きたい場合,頭部を右に振る事でジャイロセンサを操作しなければならない.しかしこれま
では図4.5.1のようにジョイスティックが固定されており,潜水の動作はジョイスティックを前
に倒す操作なので,頭は右を向き手は前に倒す事となり操作に無理があった.そこで操作性の向 上の為に,図4.5.2に示すように頭部の向きを変えても常にジョイスティックが体の正面にある ように操作系インタフェースを装着化し改善した.
図4.5.1 固定ジョイスティック 図4.5.2 操作系の装着化
頭部の向きを変えてもジョイスティックを操作可能とするため,木板を首から紐で吊り下げベ ルトで腹部に固定し,この木板上にジョイスティックを固定する方法を採用した.またシステム の設置作業を容易にし快適に被験可能とするため,HMDのアダプタ部も板に載せ,各インタフ ェースのコード類を一纏めにしてケーブルの統一を図った.紐とベルトの長さは調節可能なので,
被験者の体格に合わせたサイズ調整を可能にした.
4.6 イベント展示等での体験学習会と「海女via」アンケート調査結果
平成18年8月21日に久慈市立小袖小学校の第五及び第六年生の児童5名に対する体験学習会 を久慈市小袖海岸海女センターで開催した.操作系インタフェースはこの学齢の被験者ならば多 少大きく重いと感じながらも装着できる事が分かった.熱中して学習している様子も見受けられ,
「海女via」に対する評価も非常に高かった.この様子を図4.6.1に示す.体験学習会の様子や本
研究に関して同日NHKの取材があり,平成18年9月14日(木)のNHKおはよう日本の5:
48から「海女を仮想体験」という記者リポートとして全国放映された.以下にアンケート集計結 果のうち意見や感想について抜粋して示す.
- 29 -
〇アンケート結果(抜粋)
・海女viaも立体感があってすごく驚いた.
・海女の仕事をやってみたくなった.
・海女の気持ちになって遊ぶことができて楽しかった.
・コントローラーの使い方が簡単だった.
・海女の気持ちになれてよかった.
図4.6.1 海女センター 図4.6.2 サイエンスフェスティバル2007
平成19年5月27日に青森県上北郡東北町の青森原燃テクノロジーセンターで開催された,サ イエンスフェスティバル2007において,「海女via」の体験学習会を実施し,「海女via」の操作 インタフェースに関するアンケート調査を行った.主な被験者は小学生児童で,50名以上の児童 多数が参加した.アンケート内容を以下に示す.その模様を図4.6.2 に示す.
〇アンケート質問項目
・操作方法: 操作の仕方がわかりましたか?
・装置重量: ジョイスティック装置は重かったですか?
・操作性 : ジョイスティック装置は操作しやすかったですか?
・現実感 : 海女さんになったつもりで「海女via」を体験できましたか?
操作インタフェースに関するアンケート結果を表4.3.1に表す.操作方法に関して理解できた 学習者が多かったが,装置の重さや操作性に関しては意見が分かれており,特に6 ~ 11歳の学 習者の多くは装置が重いと感じ,装置を重いと感じた12歳以上の学習者も多かった.操作性に

![図 6.3.2 と図 6.3.3 で示したように、水掻き動作モデル B に該当する部分において Y 軸及び Z 軸加速度、Roll 値はすべて負の方向へ変化するため、出力値が小さいほどレベルが高くなるよう に設定した.閾値は、筆者の水掻き動作 10 回分のデータを基に、それぞれの値の最小値と最大 値の変化量から決定した.Roll 値においては、-90[度]より小さくなった際は、水掻き動作で想定 される範囲外であるとし、レベル出力は 0 とする.レベルは後述する移動量と関係しており、レ ベルの数値が高いほど移](https://thumb-ap.123doks.com/thumbv2/123deta/6837338.2238083/47.892.174.762.695.903/モデル軸及び小さいレベルデータそれぞれにおい小さくレベル.webp)
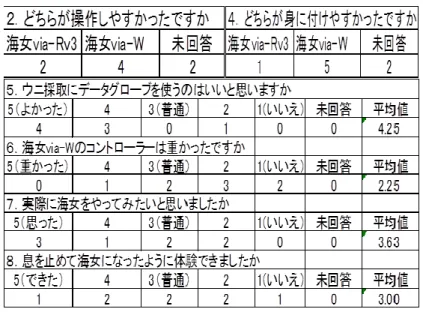
![図 7.4.1 ジャックナイフダイブ 試作した格子やカメラを潜水業者に依頼して海中設置を試みた.小袖海岸での撮影は平成 24 年 9 月 24 日と 10 月 4 日の2回予定したが,台風などによる悪天候で危険なため撮影できなかっ た.そこで天候に影響されないプールでの撮影に変更した.平成 24 年 10 月 31 日に青森県立八 戸水産高等学校(以後,八戸水産と略す)の水深5[m]のプールにて2名の海女の潜水動作撮影 を行った.耐水ケースに入れたカメラを三脚に取り付け,三脚に錘をつけて浮かないように固](https://thumb-ap.123doks.com/thumbv2/123deta/6837338.2238083/56.892.284.664.146.401/ジャックナイフダイブカメラによるなためなかったそこ取り付け.webp)