DOI: http://doi.org/10.14947/psychono.35.24
意識下応答を活用した情報提示デバイスの研究
安 藤 英 由 樹
大阪大学大学院情報科学研究科Research on information display devices utilizing under-conscious response
Hideyuki Ando
Graduate School of Information Science and Technology, Osaka University
We propose a method to solve problems that are difficult to solve only from engineering knowledge by using phenomena modeled in psychology fields such as “sensory-motor loop” and “sensory-perception mechanism.” We will be explained, a method to induce behavior without paying attention by the vestibular electric stimulation meth-od that causes a physical response despite unconscious stimulation. And, a methmeth-od of communicating/learning non-verbal skills by causing the body response under consciousness by synthesizing and switching first-person visual stimuli. The last, A highly realistic stereoscopic display method that makes it possible to significantly lower the cost of the apparatus than conventional methods by adding parallax to multi slit view.
Keywords: Unconsciously, biological signals, behavior navigation, illusion-based interface
1. は じ め に 日常生活で用いられている,スマホ,タブレットと いった情報機器や技術によって,いつでも,インター ネットを通じて情報を受け取ったり,他者とのコミュニ ケーションをとることができるという恩恵が受けられる ようになった。しかし,その情報の多くは言語的な情報 に偏っていることから,適切な行動を誘導,技の伝達や 学習,高臨場感の伝達など言語的には伝達が困難である。 そこで,本稿では,心理学の分野になじみのある“意識 下応答”に着目したインタフェースについて紹介する。 具体的には,意識下刺激にもかかわらず身体応答を引き 起こす前庭電気刺激手法によって注意を向けることなく 行動誘導する方法,一人称の視覚刺激を合成・切り替え によって,意識下で身体応答を引き起こすことで,従来 困難であった非言語的なスキルを伝達・学習させる手法, マルチスリット視に視差を加えることで従来手法より大 幅に装置のコストを下げることを可能とする高臨場感立 体提示ディスプレイ手法,について解説する。 2. 意識下応答を用いて注意を 向けることなく行動を誘導する. 近年のICT技術の進歩,スマホ,タブレットなどの携 帯端末の普及により常にインターネットにアクセスでき る社会となっている。しかし,携帯端末において何か作 業をする場合は,ほとんどの場合に常に画面を見続ける 必要がある,など端末に注意リソースを向ける必要があ る。これにより,周りのことには気がまわらなくなり, 例えば歩きスマホといった社会問題が起こっている。一 方で,人は日常何度も繰り返している動作については注 意を向けなくとも作業をこなすことができる。一方でこ のようなメカニズムに対しては適切な刺激によって誘導 できる。例えば,歩行中に歩行リズムに近いリズム音を 聞くとリズム音に注意を向けなくとも,歩行リズムはリ ズム音に引き込まれる現象が知られている。そこで本稿 では,注意を向ける必要なく行っている動作に対して, 注意を向けること無く介入する,すなわち意識下応答を 用いることで行動を誘導する方法として前庭電気刺激に ついて紹介する。 2-1 前庭感覚電気刺激(GVS)インタフェース 前庭感覚とは,加速度を検出する受容器から構成さ Copyright 2017. The Japanese Psychonomic Society. All rights reserved. Corresponding address. Graduate School of Information
Science and Technology, Osaka University, Center for Infor-mation and Neural Networks, Room3A1, 1–4 Yamadaoka, Suita, Osaka, 565–0871, Japan. E-mail:[email protected]
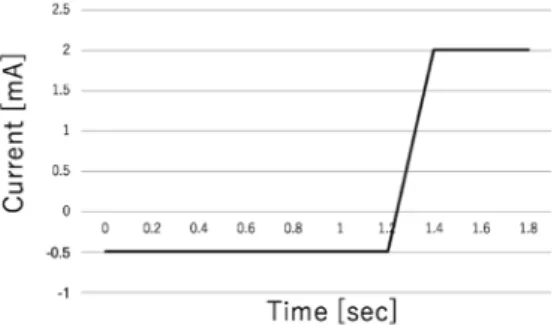
れ,主に人間の平衡感覚を司る感覚である。前庭器官は 三半規管および耳石器内にある卵形嚢,球形嚢中の有毛 細胞によって構成されている。三半規管では3軸の回転 角加速度を受容し卵形嚢,球形嚢では直線加速度を受容 している。この前庭器官は左右の耳の後ろ(乳様突起 部)の間に電流を通電することで活動することが知られ ており,この現象は前庭電気刺激(Galvanic Vestibular Stimulation: GVS)と呼ばれている。GVSは医療現場にお いて電気性身体動揺検査(GBST)として知られており, 右耳へ正方向の電流を流すと,身体は右側に傾き,左耳 へ正方向の電流を流すと左側に傾く。人は前庭感覚に変 化が生ずると意識下で起こる反射として体の重心バラン スを制御し,足が意識下で自動的にバランスをとる方向 に踏み出される。そのため,歩行中に GVSが与えられ ると,バランス補正動作が誘発され,歩行方向が変化す る。筆者らはこの意識下で起こるメカニズムを利用して GVSを身体誘導のためのインタフェースとして開発を 行 っ て き た (安藤,渡邊,杉本,前田,2007)。現状 GVSは経皮電気刺激手法を用いているため皮膚に対して 若干のチクチク感があるものの,前庭器官に対する刺激 は知覚閾値以下であっても上記のバランス補正が十分に 行われることから,意識下において歩行方向を制御する ことが可能である。すなわち,知覚閾値下の刺激によっ て行動に摂動を及ぼすことができ,このことに人はほと んど注意を向ける必要がない。バランス補正による歩行 方向の変化が起こって初めて行動に変化が生じているこ とに気がつく(Figure 1)。つまり,GVSインタフェース は意識下応答を用いて注意を向けることなく行動を誘導 する手法であるといえる。 2-2 少ない電流量で最大の効果を得るGVS手法 GVSの電流値と誘発される身体動揺の大きさは正の相 関がある(安藤他,2007) ため,強力な加速度感覚の惹 起や大きな身体動揺の誘発のためには大きな電流で刺激 をする必要がある。 しかしながら,安全性の観点から,印加する電流値は 小さい方が望ましい。特に,実験倫理の観点から筆者ら は安全ガイドラインを専門の医師との検討の結果次の条 件設定もとに倫理審査を通過している。刺激電流の最大 電流値は3.0 mA,1回の刺激電流の最長持続時間は5秒 間,1日の合計刺激時間は60秒間,刺激と刺激の間には 3分間の休憩をとる。したがって,現状では大きな身体 動揺を誘発するには不十分な電流印加しか認められてい ない。そこでこの問題を解決するために,人の知覚特性 の非線形性を考慮して,あらかじめ微弱な電流を逆方向 に印加しておき,提示したいタイミングで正方向に通常
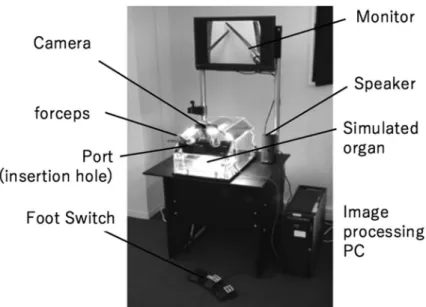
の電流印加を行うことで,身体動揺の増強手法を提案し た(青山他,2014, 2015)。具体的にはFigure 2に示すよ うに,往復電流刺激は逆電流部と順電流部からなる。こ の逆電流部の電流値を逆電流値,逆電流の印加時間を逆 電流印加時間と定義し,あらかじめ逆電流を印加するこ とで,1.8倍程度の増強効果が得られることがわかった。 これにより最小の印加電流で,最大の効果を得るための 方法論が確立された。さらに,この電気刺激を多自由化 する方法にも成功している(Aoyama et al., 2015)。 3. 意識下応答を用いて言葉で 説明できないことを伝える 人は動作を共有するために見まねを使って,他者と同 じ動作を行おうとする。しかしながら,見まねのような 第 3者視点(Third person view)からの動作の再現は他 者から自分へ身体の座標系に変換する作業が必要であ り,位置姿勢を高精度に一致させることは容易ではな い。そこで筆者らは,他者の自分の一人称視点を合成す ることで,自分の視野に見えている他者の身体姿勢に, 自分の身体姿勢を重ね合わせることによって,身体座標 の変換を不要とし,瞬時に同じ姿勢を取ることができる 視野共有システムを構築した(米村他,2011) 。 3-1 注意を向けなくとも追従できる重ね合わせ方法 このシステム(Figure 3)によって,紐の結び技術の といった手元の動きから,中国ゴマのような素早い全身 運動まで,技の伝達が可能であることを実験によって確 認した。しかしながら,双方の画面の合成の場合に複数 の身体部位を同時に追従させる課題を行った場合には, 重ね合わせる身体部位のそれぞれに注意を向けなくては いけない。そこで,重ね合わせ方法について,合成だけ ではなく切り替えを行うことで,仮現運動,擬似触力覚 などの要素が入り交じったと思われる現象が生起し,そ れぞれの身体部位が意識下で合わせようとすることがわ かった。著者らはそのような状態の一部を自他融合感現 象(Yokosaka et al., 2014) と定義し自他上肢の融合感を定 量化する実験を行い,自他視野が周期400 ms,自他視野 の提示時間比率が1 : 2である周辺において,自他融合感 が生起していることを確認した. 3-2 腹腔鏡トレーニングシステムへの応用 前節までに一人称視点の合成によって,学習者は熟練 者の動作を熟練者と同じ1人称視点から観察することで あたかも熟練者の動作を自分が行っているように感じら れることでスキルの伝達に効果があることについて説明 したが,スキルが伝達した状態で繰り返し同じ動作を繰 り返すことでスキルを学習することも可能である。ここ ではその現実的な応用先について腹腔鏡トレーニングシ ステムへの応用について議論する。近年医療技術の進歩 によって,多くの外科分野において開腹手術ではなく, Figure 2. Examples of GVS current waveforms that
ob-tain maximum effect with a small amount of current.
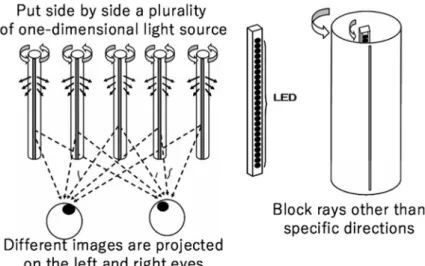
腹腔鏡下手術が普及している。腹腔鏡下手術は,腹腔内 に内視鏡カメラと鉗子等を刺入して行う外科手術であ り,開腹手術と比べて低侵襲であることによる患者への 負担軽減や合併症の少なさ等の利点がある一方で鉗子の 挿入孔が“てこ”の支点のように働く独特な操作やモニ タを通して行うための方向・スケールの変換への適応と いった特有の技能が求められ,手術の難度は高くそのた め熟練医が不足しているという問題がある。一方で,筆 者らは目視の代わりに内視鏡映像を利用することが一人 称視点という観点から共通であるので,腹腔鏡トレーニ ングにおいても,学習者は鉗子の動かし方の練習時に熟 練者の動作に重畳させることでトレーニングに効果があ ると考え,トレーニングシステム「追いトレ」(Figure 4) を実現した(近藤他,2013)。このシステム用い結紮の トレーニングを題材として研修医 6名に対して実験を 行ったところ,従来独学で行っていた手法よりも1/7程 度の時間で同程度の結紮ができ,また,技術認定試験の チェックリストによる点数比較においても,有意に点数 が高いことが示された。 4. 意識下応答を用いて工学的問題を解決する. 一般的な三次元視覚情報提示装置では観察者が眼鏡を 装着する必要があるが,デジタルサイネージなどの用途 においては,裸眼で立体視が可能であることが必須であ る。多人数の観察者に対して裸眼立体視を実現する手法 として対象周辺の光線情報を再現する手法が提案されて いるがその多くは視覚情報の提示範囲が限られるもの や,提示範囲を大きくするのに大規模なシステムが必要 であった。こういった問題に際し,単に工学技術の改良 に頼るのではなく,人の心理物理特性を効果的に利用す ることで問題解決を試みることも可能な場合がある。 そこで,筆者らは提示システムの極小化を目的とし て,広告や文字ニュース等,店舗や公共空間に広く設置 されているマルチスリット視を用いたディスプレイに指 向性をもたせ,両眼視差や運動視差を用いて立体提示可 能とする方法を提案した(安藤他,2016) 。 4-1 マルチスリット視を用いた光線再現立体ディスプ レイ 提案ディスプレイはFigure 5左のように,一次元の光 源を複数本並べて配置し,光源の周りに特定の方向以外 の光線を遮る筒(Figure 5右)を置き,さらに,筒を高 速で回転させ,それに合わせて光源の発光パタンを方向 ごとに変化させる。発光パタンは,その光源の空間で何 かが動いているような像を各方向に再現することで,光 源群からは,異なる方向ごとに空間の情報を再現したス リット視の像が知覚されることになる。このとき,光源 の方向指向性が十分鋭ければ,左右両眼に異なるスリッ ト視が生じ,奥行きを持つ動画像が知覚されることにな る。しかしながら,ディスプレイよりも奥側の奥行き知 覚は可能であるがディスプレイ手前側の奥行きの知覚が 難しいという問題が起こった。
4-2 透明視解釈による遮 矛盾の解決 ディスプレイよりも奥側の奥行き知覚は可能であるが ディスプレイ手前側の奥行きの知覚が難しいという問題 について,その理由を遮 矛盾と考え,透明視解釈 (Figure 6)の概念を用いて,文字や図形パタンと背景画 像と輝度について,手前側において飛び出して知覚でき る条件について調査した。透明視が成立する輝度条件は 透明面を構成する領域(Figure 6 ③)の明るさが背景 (Figure 6②)と遮 板(Figure 6①)の間の輝度のとき であり,それ以外のときは透明視解釈が起こらない。そ の結果,透明視解釈が可能な条件では遮蔽矛盾が解消さ れ,ディスプレイ手前側の奥行き知覚が可能となった。 反対に透明視解釈が生じない輝度条件下であると,手間 側の奥行き知覚が困難であることを明らかとした(安藤 他,2016) 。 5. お わ り に 本稿では,技術的課題の解決のために,意識下で行っ ている感覚知覚処理のなどを活用する方法について例示 した。情報提示デバイスという観点から情報を受け取る のは人であることから,心理物理学で培ってきた様々な 知見を,工学系研究者は人の情報処理システムとして捉 え,活用することが今後も不可欠であろう。筆者は本稿 のような切り口などによる,心理学分野と工学分野の融 合に関心を持つ研究者が増えていくことを切望する。 文 献 安藤英由樹・平原誠一郎・古川正紘・前田太郎・渡邊淳 司(2016).マルチスリット立体ディスプレイにおけ る透明視を利用した知覚特性の改善 日本バーチャル リアリティ学会論文誌,21, 149–152. 安藤英由樹・渡邊淳司・杉本麻樹・前田太郎(2007). 前庭感覚インタフェース技術の理論と応用 情報処理 学会論文誌,48, 1326–1335. 青山一真・安藤英由樹・飯塚博幸・前田太郎(2014). 前庭電気刺激における逆不感電流を用いた加速度感覚 の増強 日本バーチャルリアリティ学会論文誌,19, 315–318.
Aoyama K., Iizuka H., Ando H., & Maeda T., (2015). Four-pole galvanic vestibular stimulation causes body sway about three axes, Scientific Reports, 5, 10168: doi: 10.1038/ srep10168
青山一真・飯塚博幸・櫻井 悟・宮本靖久・古川正紘・ 前田太郎・安藤英由樹(2015).往復電流刺激が及ぼ す前庭電気刺激の身体動揺増大効果のモデル化 日本 Figure 6. Examples of transparent view.
バーチャルリアリティ学会論文誌,20, 291–298. 近藤大祐・飯塚博幸・安藤英由樹・小濱和貴・坂井義
治・前田太郎(2013).腹腔鏡下手術トレーニングに おける視野共有手法による学習効果とその実証 日本 バーチャルリアリティ学会論文誌,18, 487–496. Yokosaka T., Iizuka H., Yonemura T., Kondo D., Ando H., &
Maeda T. (2014). Alternating images of congruent and
in-congruent movement creates the illusion of agency, Scientif-ic Repot., 4, 6201.
米村朋子・近藤大祐・橋本悠希・丹羽真隆・飯塚博幸・ 安藤英由樹・前田太郎(2011).視野共有システムを 用いた心肺蘇生法の訓練効果 日本バーチャルリアリ ティ学会論文誌,16, 623–632.