CONSTRUCTION OF FOLD MAP OF LENS SPACE
L(p, 1)
WHERE SINGULAR SET IS A TORUS
弘前大学教育学部 山本稔
MINORUYAMAMOTO
FACULTY OFEDUCATION,HIROSAKI UNIVERSITY
1. INTRODUCTION
Throughout
thereport, all manifolds and maps aredifferentiable ofclassC^{\infty}. Let
f
: M\rightarrow \mathbb{R}^{p} be a mapofa closedn‐dimensional manifold M into\mathbb{R}^{p}(n\geq p)
. We denoteby
S(f)
thesetofpoints
in M where the rankofthedifferential of
f
isstrictly
less thanp. We say thatS(f)\subset M
is asin9^{ular}
setof
f
andf(S(f))\subset \mathbb{R}^{p}
is a contour off.
Let
f
:M\rightarrow \mathbb{R}^{3}
be a map ofaclosed connected oriented 3‐dimensional manifold M into\mathbb{R}^{3}
. For any q \inS(f)
off
: M \rightarrow \mathbb{R}^{3}, ifwe can choose
local coordinates
(
u_{1})u2,u3)
centered atq and(
v_{1},v_{2},v3)
centered atf(q)
respectively
such thatf
has thefollowing
form:(1.1)
(
v_{1}\circ f, v_{2}\circ f
,v3\circ f
)
=(u_{1}, u_{2}, u_{3}^{2})
,then we call
f
afold
map. It is known that iff
: M \rightarrow\mathbb{R}^{3}
is a fold map, thenS(f)
isaclosed orientable surface(not
necessaryconnected)
andf|S(f)
:S(f)\rightarrow \mathbb{R}^{3}
is animmersion. Iff|S(f)
is animmersion withnormalcrossings,
we callf
a stablefold
map.Eliashberg
[2]
showed that if aclosed surface Vsplits
M into two mani‐folds
M_{1},
M_{2} with\partial M_{1}=\partial M_{2}=V
, thenthere exists a fold mapf
: M\rightarrow\mathbb{R}^{3}
such thatS(f)
= V.Here,
M_{1} andM_{2}
are not necessary connected.In this report, we
apply Eliashbergs
theorem to a lens spaceL(p, 1)
andconstruct astable fold map
f
:M\rightarrow \mathbb{R}^{3}
such thatS(f)=T^{2}
isaHeegaard
surface ofL(p, 1) (p\geq 2)
.The authorwouldlike to thankthe
organizers
Professor Masatomo Taka‐ hashi and Professor Takahiro Yamamoto fororganizing
andincluding
him in theconference,
Singularity
theory
of differential maps and itsapplica‐
tions. He also wold like to thank Professor KentaHayano,
Professor GooIshikawa,
Professor YusukeMizota,
Professor TakashiNishimura,
Profes‐sor Osamu
Saeki,
Professor KentaroSaji
and Professor Kazuto Takao for invaluablecomments at his talkof this conference.2. DESCRIPTION OF A STABLE FOLD MAP
In this
section,
weexplain
amethodtodepict
astable foldmapf
: M\rightarrow\mathbb{R}^{3}
. In thefollowing,
we assume that M is a closed connected oriented 3‐dimensional manifold andthat\mathbb{R}^{3}
and \mathbb{R}^{2} are oriented.The author has been supported by Grant‐in‐Aid for Young Scientists (B) JSPS (No.
For a stable fold map
f
: M \rightarrow\mathbb{R}^{3}
such thatS(f)
= V and M =M_{1}\displaystyle \bigcup_{V}M_{2}
, weremark thatf|M_{1}
andf|M_{2}
are immersions and extensionsof
f|V
. We assume thatf|M_{1}
is an orientationpreserving
immersion andf|M_{2}
isan orientationreversing
immersion. The orientationonM_{1} inducesthe orientation on V as follows. For q \in V, let
{
n_{1}, n_{2},nt3}
be the basisof
T_{q}(M_{1})
which defines the orientationon M_{1} and n_{1} the outward normalvector. Then theorientationon
V=\partial(M_{1})
is definedby
\{n_{2}, n3\}.
By
Bruce and Kirks theorem[1],
there exists anorthogonal
projection
$\pi$ :\mathbb{R}^{3}\rightarrow \mathbb{R}^{2}
such that$\pi$ \mathrm{o}f|V:V\rightarrow \mathbb{R}^{2}
is a stable map. It is well‐known that astable mapsatisfies thefollowing
properties.
Proposition
2.1([3]).
A smooth mapg :N\rightarrow \mathbb{R}^{2}
of
a closedsurface
N into\mathbb{R}^{2}
is a stable mapif
andonly if
thefollowing
conditions aresatisfied.
(1)
For every q \inS(g)
, there exist local coordinates(u_{1}, u_{2})
and(v_{1}, v_{2})
aroundq and
g(q)
respectively
such that oneof
thefollowing
holds:(i) (
v\mathrm{i}\circ g)v_{2}\circ g)
=(u\mathrm{i}, u_{2}^{2})
, q :fold
point,
(ii) (
v\mathrm{i}\circ g)v_{2}\circ g)
=(u\mathrm{i}, u_{2}^{3}-u\mathrm{i}u_{2})
, q: cusppoint.
(2)
If
q is a cusppoint
of
g, theng^{-1}(g(q))\cap S(g)=\{q\},
(3) 9|S(9)\backslash {
setof
cusp pointsof
g}
isanimmersion with normalcrossings.
In thefollowing,
we setf_{V}^{ $\pi$} = $\pi$\circ f|V
. Let q \in V be a cusppoint
of a stablemapf_{V}^{ $\pi$}
:V\rightarrow \mathbb{R}^{2}
. Forasufficiently
smallneighborhood
U off_{V}^{ $\pi$}(q)
,
the map
f_{V}^{ $\pi$}|U'
: U' \rightarrow U hasdegree
\pm 1, where U' is the component of(f_{V}^{ $\pi$})^{-1}(U)
containing
q. Ifthedegree
ofqis +1(resp.
-1),
thenwe shouldpaint
q andf_{V}^{ $\pi$}(q)
red(resp. blue).
Foreach t\in \mathbb{R}, a
plane
\{(t, y.z)\in \mathbb{R}^{3}| y, z\in \mathbb{R}\}
isdenotedby
\mathbb{R}_{t}^{2}
.Then,
for almostall
t\in \mathbb{R},
f(V)\cap \mathbb{R}_{t}^{2}
consistsofimmersed circles(or
anemptyset),
f(M_{i})\cap \mathbb{R}_{t}^{2}
consistsof immersed surfaces(or
anemptyset)
andf(M_{i})\cap \mathbb{R}_{t}^{2}
is anextensionoff(V)\cap \mathbb{R}_{t}^{2}
.Therefore,
fromthepictures
f(M_{1})\cap \mathbb{R}_{t_{1}}^{2},
f(M_{1})\cap
\mathbb{R}_{t_{2}}^{2}
,...,
f(M\mathrm{i})\cap \mathbb{R}_{t_{n}}^{2}
andf(M_{2})\cap \mathbb{R}_{t_{1}}^{2}, f(M_{2})\cap \mathbb{R}_{t_{2}\text{)}}^{2}\ldots, f(M_{2})\cap \mathbb{R}_{t_{n}}^{2}
, we cansee the immersed 3‐dimensional manifold
f
(M1), f(M_{2})
and theimage
of the stable fold mapf(M)
. Note that theplanes
\mathbb{R}_{t_{1}}^{2}, \mathbb{R}_{t_{2}}^{2}
,...,
\mathbb{R}_{t_{n}}^{2}
can be chosen from thepicture
of thecontourf_{V}^{ $\pi$}(S(f_{V}^{ $\pi$}))\subset \mathbb{R}^{2}.
Forafold
point
q\in S(f_{V}^{ $\pi$})
off_{V}^{ $\pi$}
, there exist local coordinates(u_{1}, u_{2}, u3)
and(v_{1}, v_{2})
aroundq\in M
and$\pi$\circ f(q)\in \mathbb{R}^{2}
such that(v_{1}\circ( $\pi$\circ f), v_{2}\circ( $\pi$\circ f))=(u_{1_{\rangle}}u_{2}^{2}\pm u_{3}^{2})
holds.
Here,
S(f)
corresponds
to\{u3 =0\}
. If qcorresponds
to the map(v\mathrm{i}^{\mathrm{O}}( $\pi$\circ f), v_{2}\mathrm{o}( $\pi$\circ f))
=(u\mathrm{i}, u_{2}^{2}+u_{3}^{2})
(resp. (v\mathrm{i}^{\mathrm{O}}( $\pi$\circ f)
)
v_{2}\mathrm{o}( $\pi$\circ f) )
=(u_{1},
u_{2}^{2}-u_{3}^{2}
then we shouldpaint
q and$\pi$\circ f(q)
red(resp. blue).
\mathrm{F}\mathrm{h}om the localpicture
aroundS(f_{V}^{ $\pi$})
, we have thefollowing.
\bullet On each connected component of
S(f_{V}^{ $\pi$})\backslash
{cusp points},
it should becolored
by
redor blue.\bullet Iftwo connectedcomponents of
S(f_{V}^{ $\pi$})\backslash {cusp points}
adjacent
to thesame cusppoint, then
they
arepainted by
the differentcolors. SeeFigure
23. CONSTRUCTION OF A STABLE F0LD MAP
f^{(2,1)}
:L(2,1)\rightarrow \mathbb{R}^{3}
Inthis section, we constructa stable fold map
f^{(2,1}
) :L(2,1)\rightarrow \mathbb{R}^{3}
suchthat
S(f^{(2,1)})=T^{2}
is aHeegaard
surface ofL(
2)1).
(Step 1.)
Let g :V\rightarrow \mathbb{R}^{2}
be a stable map ofa closed connected surfaceV to \mathbb{R}^{2} such that the contour
g(S(g))
and the inverseimages
g^{-1}(\mathbb{R}_{t_{1}})\cap
V,...
,
9^{-1}(\mathbb{R}_{t_{11}})\cap V
aredepicted
inFigure
1.Here, \mathbb{R}_{t}
isa line definedby
\mathbb{R}_{t}=\{(t, y)\in \mathbb{R}^{2}|y\in \mathbb{R}\}.
Since
g^{-1}(\mathbb{R}_{t_{1}})\cap V_{\text{)}}\ldots,g^{-1}(\mathbb{R}_{t_{11}})\cap V
canbeseen as asequence of immersed curves in\mathbb{R}_{t_{i}}^{2}
, we canliftthe stablemap g :V\rightarrow \mathbb{R}^{2}
toageneric
immersiong'
:V\rightarrow \mathbb{R}^{3}
such thatg= $\pi$\circ g'
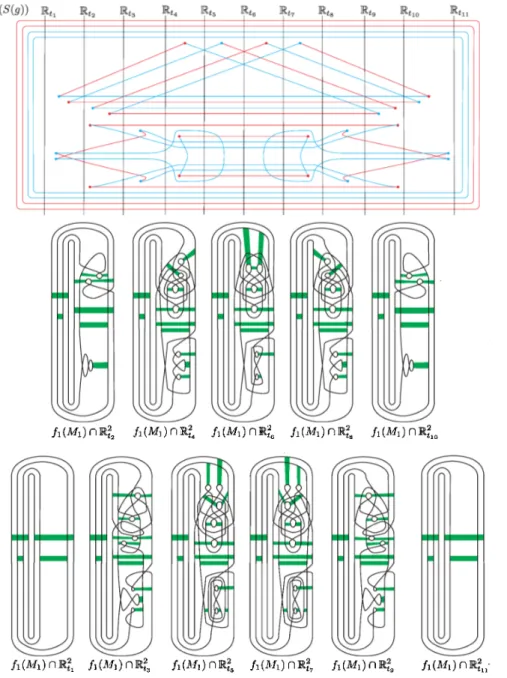
. FromFigure
1, we can check that V isa torus. In the
following,
we consider that the sequence inFigure
1 is thesequenceof immersed circles
g'(V)\cap \mathbb{R}_{t_{1}}^{2}
,...,
g'(V)\cap \mathbb{R}_{t_{11}}^{2}.
(Step 2.)
FkomFigure
1,
weconstruct twokinds ofsequencesofimmersedsurfaces which are extensions of immersed circles
g'(V)\cap \mathbb{R}_{t_{1}}^{2}
,. ..,
g'(V)\cap
\mathbb{R}_{t_{11}}^{2}
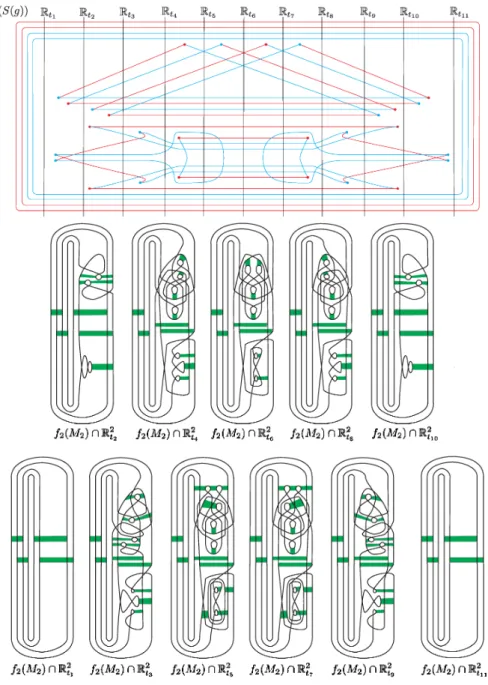
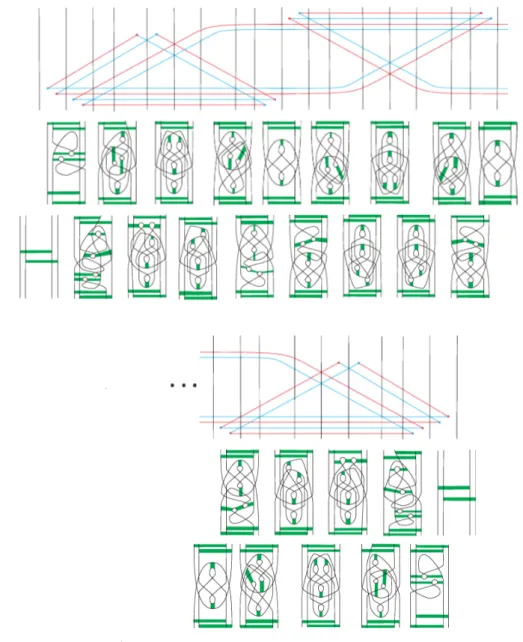
.Figure
2 represents one sequence ofimmersed surfaces andFigure
3representsanother sequence.
By combining
the immersed surfaces inFigure
2, we havean immersionf_{1}
:M_{1}\rightarrow \mathbb{R}^{3}
which isoneextension of thegeneric
immersion9
:V\rightarrow \mathbb{R}^{3}.
Also, by
combining
the immersedsurfacesinFigure 3,
wehaveanimmersionf_{2}
: M_{2} \rightarrow \mathbb{R}^{3} which is another extension of thegeneric
immersiong'
:V\rightarrow \mathbb{R}^{3}
. We define the orientation ofM_{1}(resp.
M_{2})
so as the immersionf_{1}
(resp.
f_{2}
)
is an orientationpreserving
(resp.
orientationreversing).
InFigure
2(resp.
Figure
3),
green bandsexplain
how each immersed surfacef_{1}(M_{1})\cap \mathbb{R}_{t_{i}}^{2}
(resp.
f_{2}(M_{2})\cap \mathbb{R}_{t_{i}}^{2}
)
isobtainedastheextensionof the immersed circlesg'(V)\cap \mathbb{R}_{t_{i}}^{2}
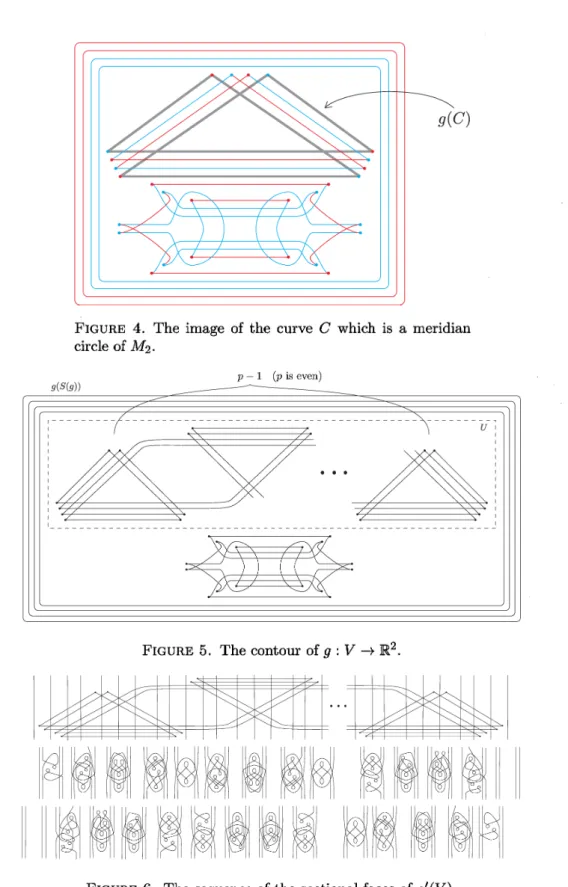
. See the webversion.(Step 3)
Let C\subset V beacirclesuch thatC\subset S(g)
and theimage
g(C)
isdepicted
asgraythick linesinFigure
4.By
aregular homotopy
off_{2}
,we cancheck thatM_{2}isasolidtorus and Cisameridian circleofM_{2}.
By
aregular
homotopy
off_{1}
,we cancheck thatM_{1} isasolidtorus and Cis\mathrm{a}(2,1)
‐curveofM_{1}. That
is,
Cturns twice inthelongitude
direction andonceinthethemeridian directionon
M_{1}
.Therefore,
by attaching
these immersionsf_{1}
andf_{2}
,we obtaina stablefold mapf^{(2,1)}=f_{1}\displaystyle \cup f_{2}:M_{1}\bigcup_{V}M_{2}=L(2,1)\rightarrow \mathbb{R}^{3}
such that
S(f^{(2,1)})=V=T^{2}
isaHeegaard
surface.4. CONSTRUCTION OF A STABLE FOLD MAP
f^{(p,1)}
:L(p, 1)
\rightarrow \mathbb{R}^{3}In this
section,
we construct astable fold mapf^{(p,1)}
:L(p, 1)\rightarrow \mathbb{R}^{3}
suchthat
S(f^{(p,1)})=T^{2}
is aHeegaard
surface ofL(p, 1) (p\geq 2)
.(Step 1.)
Let9
:V\rightarrow \mathbb{R}^{3}
be ageneric
immersion ofa closed connected surfaceVto\mathbb{R}^{3}
suchthatg= $\pi$\circ g'
isastablemapand thecontourg(S(g))
is
depicted
inFigure
5. Let U be a subset of\mathbb{R}^{2} depicted
inFigure
5. Theimage
g(V)\cap(\mathbb{R}^{2}\backslash U)
ofFigure
5 is thesame asthatofFigure
1.Therefore,
inFigure 6,
weonly
describeasequenceofimmersedarcsg'(V)\cap$\pi$^{-1}(\mathbb{R}_{t}\cap U)
.From
Figures
5 and6,
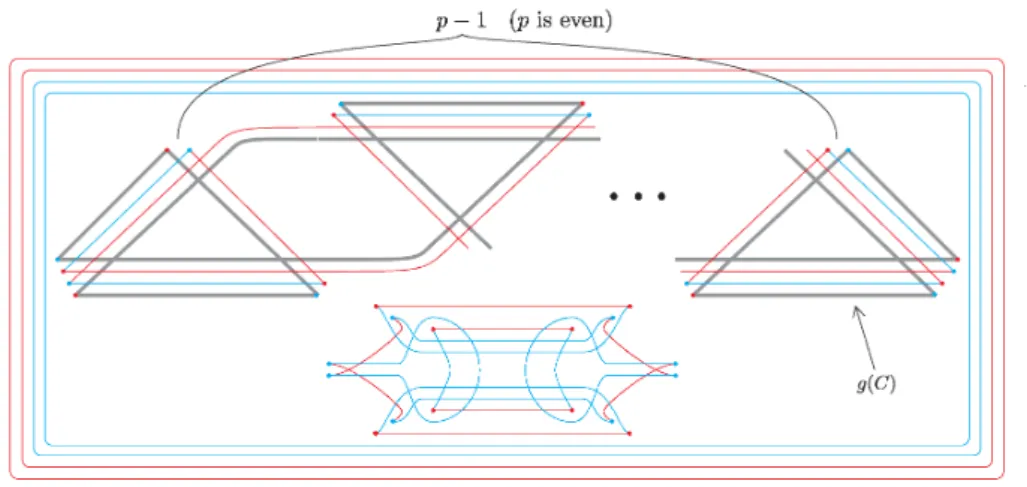
we cancheck thatV is atorus.(Step 2.)
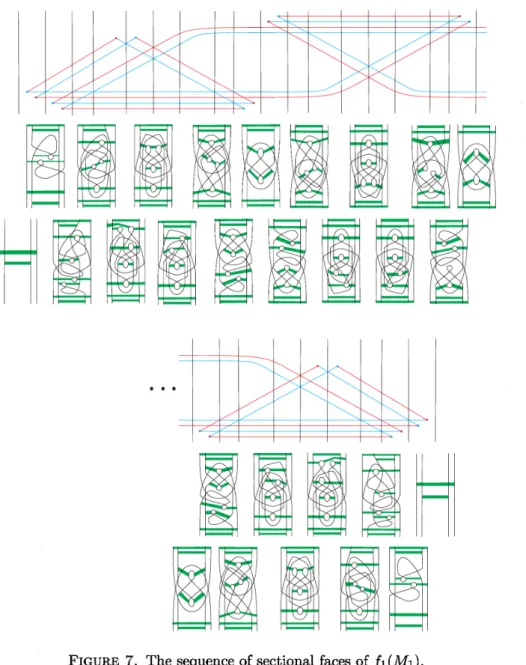
FromFigure
6,
weconstructtwokinds ofsequencesof immersedsurfaces which are extensions of immersed arcs
g'(V)\cap$\pi$^{-1}(\mathbb{R}_{t}\cap U)
.Fig‐
ure7representsonesequenceofimmersed surfaces and
Figures
8representsq\langle S(\backslash \backslash
g^{-1}(\mathbb{R}_{1_{2}})\cap V g^{-1}\langle \mathbb{R}_{t_{4}})\cap V g^{-1}(\mathbb{R}_{t_{6}})\cap V g^{-1}\langle \mathbb{R}_{l_{8}})\cap V
g^{-1}(\mathbb{R}_{t_{1}})\cap V g^{-1}(\mathbb{R}_{t_{3}})\cap V g^{-1}(\mathbb{R}_{t_{5}})\cap V g^{-1}(\mathbb{R}_{\mathrm{t}-})\cap V g^{-1}(\mathbb{R}_{t_{9}})\cap V g^{-1}(\mathbb{R}_{t_{11}})\cap V
FIGURE 1. Thecontour ofg :
V\rightarrow \mathbb{R}^{2}
and the sequence ofsectional faces of
g(V)
org'(V)
.animmersion
f_{1}
:M_{1} \rightarrow \mathbb{R}^{3}
whichisoneextensionofthegeneric
immersiong'
: V \rightarrow\mathbb{R}^{3}
.Also, by combining
the immersed surfaces inFigure 8)
wehavean immersion
f_{2}
:M_{2}\rightarrow \mathbb{R}^{3}
whichis another extension ofthegeneric
immersion
g'
:V\rightarrow \mathbb{R}^{3}
. We definethe orientation ofM_{1}(resp.
M_{2})
so astheimmersion
f_{1}
(resp.
f_{2}
)
isanorientationpreserving
(resp.
orientationrevers‐g(S( .
f_{1(M_{1})\cap \mathbb{R}_{\mathrm{z}_{2}}^{2}}
f_{1}(M\mathrm{J})\cap \mathbb{R}_{1_{4}}^{2}
f\mathrm{l}(M_{1})\cap \mathbb{R}_{t_{6}}^{2}
f_{1(M_{1})\cap \mathbb{R}_{t_{8}}^{2}}
-0f_{1(M_{1})\cap \mathbb{R}_{t_{1}}^{2}} f_{\mathrm{I}(M_{1})\cap \mathbb{R}_{\mathrm{t}_{3}}^{2}}
f_{1}(AI_{1})\cap \mathbb{R}_{t_{5}}^{2} f_{1}(_{A}\mathfrak{h}I_{1})\cap \mathbb{R}_{\mathrm{t}_{7}}^{2}
f_{1(M_{1})\cap \mathbb{R}_{t_{9}}^{2}}
f_{1(\mathrm{A}f_{1})\cap \mathbb{R}_{\mathrm{t}_{11}}^{2}}.
FIGURE 2. The sequenceofsectionalfaces of
f_{1}
(M1).
surface
f_{1}(M_{1})\cap$\pi$^{-1}(\mathbb{R}_{t}\cap U)
(resp.
f_{2}(M_{2})\cap$\pi$^{-1}(\mathbb{R}_{t}\cap U)
)
isobtainedasthe extension of the immersedarcsg'(V)\cap$\pi$^{-1}(\mathbb{R}_{t}\cap U)
. See the web version.(Step 3)
Let C\subset V be a circle such thatC\subset S(g)
and theimage
g(C)
isdepicted
as gray thick lines inFigure
9.By
aregular homotopy
off_{2},
we cancheck thatM_{2}
isasolidtorus and C is ameridian circle ofM_{2}
.By
aregular homotopy
off_{1}
, we can check that M_{1} is a solid torus and C isg(S(. \cdot\cdot
f_{2( $\lambda$\prime 1_{2})\cap \mathbb{R}_{t_{2}}^{2}}
f_{2(1\mathrm{I}1_{2})\cap \mathbb{R}_{t_{4}}^{2}}
f_{2(114_{2})\cap \mathbb{R}_{\ell_{6}}^{2}}
f_{2(11f_{2})\cap \mathbb{R}_{t_{8}}^{2}}
‐of_{2( $\Lambda$ l_{2})\cap \mathbb{R}_{t_{1}}^{2}}
f_{2(M_{2})\cap \mathbb{R}_{t_{ $\theta$}}^{2}}
f_{2( $\Lambda$ I_{2})\cap \mathbb{R}_{t_{5}}^{2}}
f_{2(M_{2})\cap \mathbb{R}_{t_{7}}^{2}}
f_{2(M_{2})\cap \mathbb{R}_{t_{9}}^{2}}
f_{2(M_{2})\cap \mathbb{R}_{t_{11}}^{2}}
FIGURE 3. Thesequenceof sectional faces of
f_{2}
(M2).
f_{2}
, we obtain a stable fold mapf_{1}\cup f_{2}
: M_{1}\displaystyle \bigcup_{V}M_{2} =L(p,p-1)
\rightarrow\mathbb{R}^{3}
such that
S(f_{1}\cup f_{2})
=V=T^{2}
is aHeegaard
surface. SinceL(p,p-1)
is)
FIGURE 4. The
image
of the curve C which is a meridian circleofM_{2}.p-1 (p iseven) .-9 ..
FIGURE 5. The contour of
g:V\rightarrow \mathbb{R}^{2}.
\Vert
\Vert
\Vert
\Vert
FIGURE 7. The sequence of sectional faces of
f_{1}
(M1).
5. REMARKS AND PROBLEMSInSections3 and
4,
weonly
construct astable foldmap ofL(p, 1)
whosesingular
setisagenus oneHeegaard
surface.Therefore,
wehaveafollowing
problem.
Problem 5.1. Construct a stable fold map
f^{(p,q)}
:L(p, q)\rightarrow \mathbb{R}^{3}
such thatS(f^{(p,q)})
is agenus oneHeegaard
surface(p-1>q>1)
.For the stable fold map
f^{(2,1\rangle}
:L(2,1)\rightarrow \mathbb{R}^{3}
of Section3,
we can check that(f^{(2,1)})^{-1}
(
f^{(2,1)}
(
L(2)
1))\cap \mathbb{R}_{t_{6}}^{2} )
is a torus inL(2,1)
. Let\mathbb{R}_{(-\infty,t_{6}]}^{3}
andFIGURE 8. Thesequenceofsectionalfaces of
f_{2}
(M2).
\mathbb{R}_{[\mathrm{t}_{6},\infty)}^{3}
be half spaces definedby
\mathbb{R}_{(-\infty,t_{6}]}^{3} =\{(x, y, z) \in \mathbb{R}^{3} | x\in (-\infty, t_{6}]\}
and
\mathbb{R}_{[t_{6},\infty)}^{3}=\{(x, y, z)\in \mathbb{R}^{3}
|x\in[t_{6}
)\infty LetNi
and N_{2} be submanifoldsof
L(2,1)
definedby
N_{1}=L(2,1)\cap(f^{(2,1)})^{-1}(\mathbb{R}_{(-\infty,t_{6}]}^{3})
andN_{2}=L(2,1)\cap
(f^{(2,1)})^{-1}(\mathbb{R}_{[t_{6},\infty,t_{6})}^{3})
. Wehaveafollowing
problem.
Problem 5.2. Does the
decomposition
N_{1}\displaystyle \bigcup_{T^{2}}N_{2}
represent a genus oneHeegaard splitting
ofL(2,1)
?Let
S^{3}=D_{1}^{3}\displaystyle \bigcup_{S_{1}^{2}}S^{2}\times I\bigcup_{S_{2}^{2}}D_{2}^{3}
beadecomposition
ofS^{3}
ande :S^{3}\rightarrow \mathbb{R}^{3}
beFIGURE 9. The
image
of the curve C which is a meridian circle ofM_{2}.
preserving
immersions ande|S^{2}
\times I is an orientationreversing
immersion.Figure
10representsthecontourof the stablemape_{S_{1}^{2}\cup S_{2}^{2}}^{ $\pi$}
:S_{1}^{2}\cup S_{2}^{2}\rightarrow \mathbb{R}^{2}
andthesequenceof thesectionalfaces of
e(S_{1}^{2}\cup S_{2}^{2})
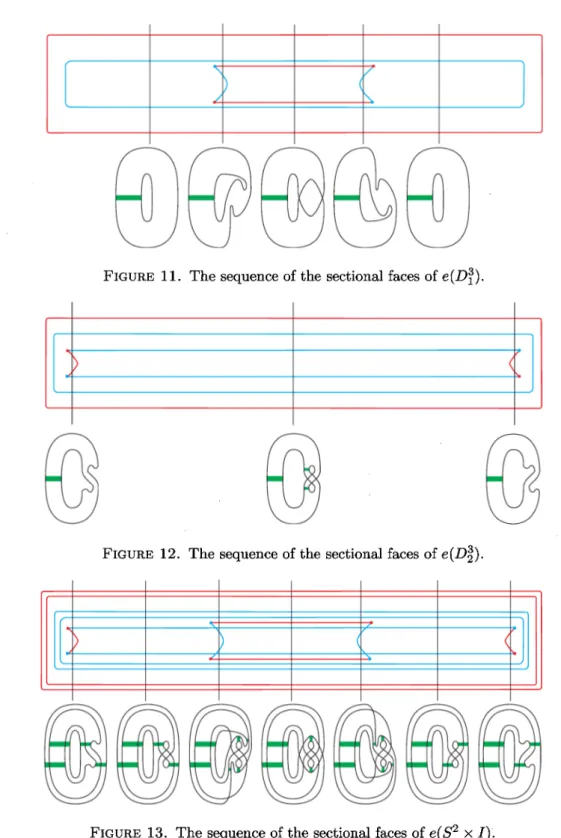
.Figure
11(resp.
Figure
12)
represents the sequence of the sectional faces of
e(D_{1}^{3})
(resp.
e(D_{2}^{3})
andFigure
13 represents thesequence ofthesectional faces ofe(S^{2}\times I)
.FIGURE 10. Thecontourof
e_{S_{1}^{2}\cup S_{2}^{2}}^{ $\pi$}
:S_{1}^{2}\cup S_{2}^{2}\rightarrow \mathbb{R}^{2}
and thesequence of the sectional faces of
e(S_{1}^{2}\cup S_{2}^{2})
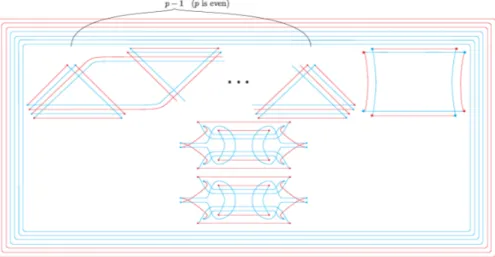
.By
a connected sumofthetwo stable foldmapsf^{(p,1)}\# e
and the Eliash‐bergs
trick which is introduced in[2],
we have a stable fold mapf_{2}^{(p,1)}
:L(p, 1)\rightarrow \mathbb{R}^{3}
such thatS(f_{2}^{(p,1)})=T^{2}\# T^{2}
is a genus twoHeegaard
surface(p\geq 2)
. Thecontour of$\pi$\circ f_{2}^{(p,1)}|S(f_{2}^{(p,1)})
isdepicted
inFigure
14.By
re‐peating
theaboveoperation,
wehaveastablefoldmapf_{k}^{(p,1)}
:L(p, 1)\rightarrow \mathbb{R}^{3}
FIGURE 11. The sequenceof the sectional faces of
e(D_{1}^{3})
.FIGURE 12. The sequence of the sectionalfaces of
e(D_{2}^{3})
.FIGURE 14. Thecontour of
$\pi$\circ f_{2}^{(p,1)}|S(f_{2}^{(p,1)})
.If we use the
Eliashbergs
trick for the stable fold map e :S^{3}
\rightarrow\mathbb{R}^{3}
)we have a stable fold map
f^{(1,0)}
:S^{3}
\rightarrow\mathbb{R}^{3}
such thatS(f^{(1,0)})
=T^{2}
isa genus one
Heegaard
surface.Therefore,
we also have a stable fold mapf_{k}^{(1,0)}
:S^{3} \rightarrow \mathbb{R}^{3}
such thatS(f_{k}^{(1,0)})
=k\# T^{2}
is a genus kHeegaard
surface.Wehavea
following problem.
Problem 5.3. Construct anontrivial stable fold map
f
:L(
p)p-1
)
\rightarrow \mathbb{R}^{3}
such that
S(f)
isa genus kHeegaard
surface(p\geq 1, k\geq 2)
.Let SI
(3,1)
be the group of oriented bordism classes of immersions ofclosed oriented 3‐dimensional manifolds in
\mathbb{R}^{4}
and SFold(
3,
0)
the group of orientedfold cobordism classes of foldmapsof closedoriented3‐dimensional manifolds into\mathbb{R}^{3}
. Let K :S^{3}\rightarrow \mathbb{R}^{4}
be an immersionwhich is constructedfrom the track of the standard Froissart‐Morins eversion
S^{2}
\times I \rightarrow\mathbb{R}^{4}.
Hughes
[5]
showed that the immersion K is agenerator of SI(3,1)
. Hirato‐Takase
[4]
showed that thehomomorphisim
\mathrm{m}:\mathrm{S} $\Gamma$ \mathrm{o}\mathrm{l}\mathrm{d}(3,0)\rightarrow \mathrm{S}\mathrm{I}(3,1)
isanisomorphism.
Since we can check that e andf^{(1,0)}
:S^{3}\rightarrow \mathbb{R}^{3}
are oriented foldcobordant,
and that the bordismclassofK isequal
to\mathrm{m}(e)
, the stablefold map
f^{(1,0)}
:S^{3}\rightarrow \mathbb{R}^{3}
is ageneratorofSFold(
3,
0)
. This alsoshowsthatf^{(1,0)}
:S^{3}\rightarrow \mathbb{R}^{3}
is agenerator ofthe third stablestem$\pi$_{3}^{S}.
REFERENCES
[1] J. W. Uruce and N. P. Kirk, Generic projections ofstable mappings, Bull.
London Math. Soc.32 (2000),718‐728.
[2] Y.Eliashberg, Onsingularities of foldingtype,Math.USSRIzavestija4(1970),
1119−1134.
[3] M.Golubitskyand V.Guillemin,Stablemappingsand theirsingularities,Grad‐
uate Texts in Mathematics, Vol. 14, Springer‐Verlag, NewYork, Heidelberg, 1973.
[4] Y. Hirato and M.Takase, Compositions of equi‐dimensional foldmaps, Fund.
Math. 216 (2012), 119‐128.
[5] J. $\Gamma$. Hughes, Bordism and regular homotopy oflow‐dimensionalimmersions,