Design of Escaping Trajectory from Mars by Using a Halo Orbit as Hub and a Method of Delta V Reduction
Yu Tanaka (Waseda University, Graduate School), Yasuhiro Kawakatsu (ISAS/JAXA), Hiroaki Yoshimura (Waseda University)
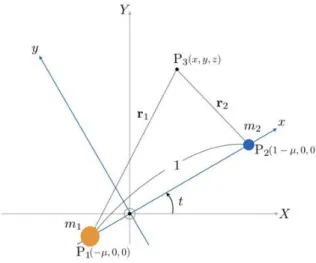
Abstract: This paper proposes a new method to design low-energy transit trajectories, in which a halo orbit is regarded as hub, for deep space missions such as JAXA’s Martian Moons eXploration (MMX). First, we consider the Sun-Mars-Spacecraft system and compute a halo orbit in the context of Circular Restricted three-Body Problem (CR3BP). In order to use invariant manifolds, we attempt to make use of eigenvectors of the halo orbit and give them as perturbations to a reference point, which is each state vector on the halo orbit.
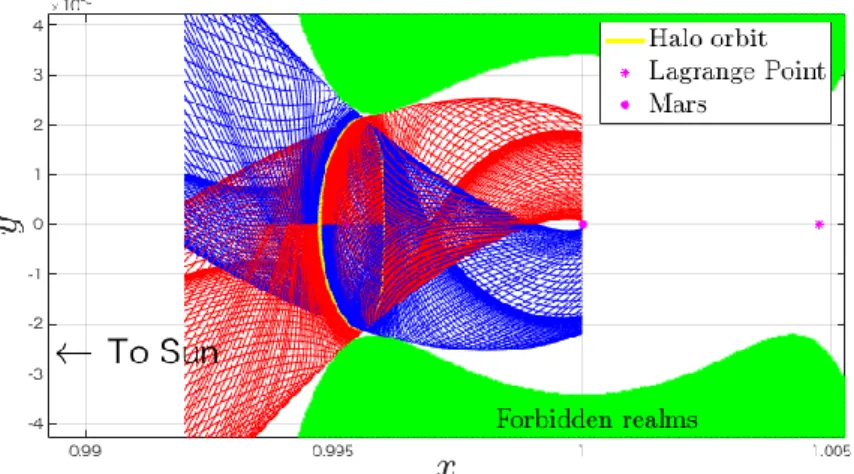
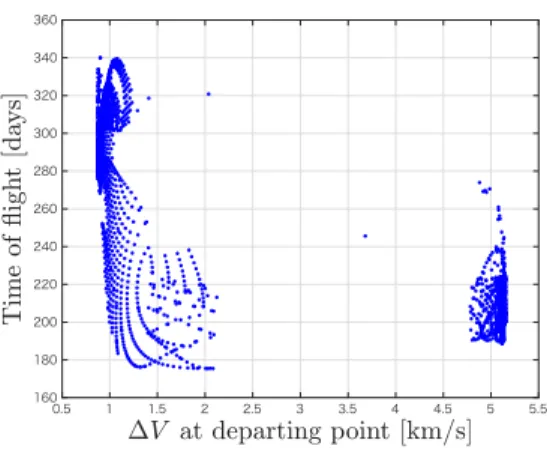
By propagating the reference point with perturbations in backward and forward time, we search trajectories so that a spacecraft can depart from the vicinity of Mars and go through a neighborhood of Sun-Mars Lagrange point. As a result, we realize to design the trajectories escaping from the vicinity of Mars to Sun-side region in low-energy. In addition, we consider a method to reduce a Delta V, which is an amount of impulsive velocity maneuver at departing point, for practical use.
ハロー軌道をハブとした低エネルギー輸送軌道の設計 と増速量低減化手法
田仲 悠(早大院),川勝 康弘(ISAS/JAXA),吉村 浩明(早大)
摘要:本研究では,JAXA の
MMX
ミッションのような深宇宙探査機に適用し得る,ハロー軌道をハ ブとした低エネルギー輸送軌道の新しい設計手法を提案する.初めに,太陽—火星—宇宙機系の円制限3
体問題の枠組みでハロー軌道を計算する.次に,ハロー軌道の各点を基準点とし,基準点における ハロー軌道の固有ベクトルを摂動として基準点に与える.その状態量を前後の時間に軌道伝播するこ とで,火星近傍を出発して太陽—火星系のラグランジュ点近傍を通るような軌道を探索する.その結果 として,火星近傍を脱出して太陽側の領域へ輸送される低エネルギーの軌道設計を実現する.また,より実用的な軌道のために,出発時の増速量∆𝑉を低減化する手法について検討する.