画像処理に基づくパラフォイル飛行体の飛行経路の 同定 : 研究成果報告
著者 溝端 一秀, 岸本 泰尚
雑誌名 室蘭工業大学航空宇宙機システム研究センター年次
報告書
巻 2007
ページ 30‑36
発行年 2008‑09
URL http://hdl.handle.net/10258/00008701
画像処理に基づくパラフォイル飛行体の飛行経路の 同定 : 研究成果報告
著者 溝端 一秀, 岸本 泰尚
雑誌名 室蘭工業大学航空宇宙機システム研究センター年次
報告書
巻 2007
ページ 30‑36
発行年 2008‑09
URL http://hdl.handle.net/10258/00008701
- 30 -
↹ಣℂ䈮ၮ䈨䈒䊌䊤䊐䉤䉟䊦㘧ⴕ䈱㘧ⴕ⚻〝䈱หቯ㩷 䋭㩷 ⎇ⓥᚑᨐႎ๔㩷
㩷
䂾㩷 㩷 Ḵ┵㩷 ৻⑲䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇ⑼㩷 ಎᢎ䋩㩷ጯᧄ㩷 ᵏዏ䋨ᯏ᪾䉲䉴䊁䊛Ꮏቇኾ㩷 㜞ㅦᵹജቇ⎇ⓥቶ䋩㩷
㩷 㩷
㪈㪅㩷 ✜⸒㩷
ㄭᐕޔᄢ㒽㑆ߩ⥶ⓨャㅍ߮ૐ゠߳ߩౣ↪ဳቝቮャㅍߩᣇߦㅢߔࠆ㕟ᣂ⊛ၮ⋚ᛛ ⴚߩ⎇ⓥ㐿⊒߇ᒝߊ᳞ࠄࠇߡࠆ㧚⎇ⓥߐࠇߚၮ⋚ᛛⴚߩᯏ⢻ᕈ⢻ߪ㘧ⴕ⹜㛎ߦࠃߞߡታ⸽
ߐࠇࠆᔅⷐ߇ࠆ㧚ߘߩߚߩ⒳ޘߩ㘧ⴕታ㛎ᯏ߇ឭ໒ߐࠇߡ߅ࠅ㧘ᧄቇߦ߅ߡ߽ዊဳ㖸ㅦ 㘧ⴕታ㛎ᯏߩ㐿⊒⸘↹߇ㅴࠄࠇߡࠆ㧚
ߎࠇࠄ㘧ⴕታ㛎ᯏ߿ౣ↪ဳቝቮᯏߩ㐿⊒ೋᦼᲑ㓏ߦ߅ߌࠆ◲ᤃߥ࿁ᚻᴺߣߒߡ㧘߹ߚ⥄ജ ߢṖ〝ߦᏫㆶߢ߈ߥߊߥߞߚ㓙ߩ✕ᕆߩ࿁ᚻᴺߣߒߡ㧘Ṗⓨᣓ࿁⌕㒽ᠲࠍⴕ߃ࠆޟࡄ
ࡈࠜࠗ࡞ޠࠍ↪ߚޟࡄࡈࠜࠗ࡞㘧ⴕࠪࠬ࠹ࡓޠ߇ᦸߢࠆ㧚㘧ⴕታ㛎ᯏ߿ౣ↪ቝቮᯏ ߪ⥄ᓞ㘧ⴕߔࠆ߽ߩߢࠆߎߣ߆ࠄ㧘ࡄࡈࠜࠗ࡞㘧ⴕࠪࠬ࠹ࡓ߽⥄ᓞ㘧ⴕน⢻ߢࠆߎߣ߇ᦸ
߹ࠇࠆ㧚
ᧄ⎇ⓥߪ㧘⥄ᓞ㘧ⴕน⢻ߥࡄࡈࠜࠗ࡞㘧ⴕࠪࠬ࠹ࡓࠍ᭴▽ߔࠆߎߣࠍ⋡ᜰߒߡ㧘⥄ᓞ㘧ⴕ
ᓮߦᔅⷐߥ㘧ⴕ․ᕈ࠺࠲ࠍផቯߔࠆߎߣࠍ⋡⊛ߣߔࠆ㧚ዊဳࠫࠦࡦࡄࡈࠜࠗ࡞ᯏࠍ
↪ߒߡ㧘㘑╬ߩᄖੂߩήደౝߢ㘧ⴕ⹜㛎ࠍᄙᢙታᣉߒ㧘㘧ⴕᤋࠍࡆ࠺ࠝࠞࡔߢᓇߒ㧘ߘ ߩᤋࠍ⸃ᨆߔࠆߎߣߦࠃߞߡਃᰴర⊛ߥ㘧ⴕ⚻〝ࠍหቯߔࠆ㧚߹ߚ㧘⥄↱ᐲߩ㘧ⴕജቇࠪࡒ ࡘ࡚ࠪࡦࠍታᣉߒ㧘ߘߩ⸃ࠍ㘧ⴕ⹜㛎࠺࠲ߣᲧセߔࠆߎߣߦࠃߞߡ㧘ࡄࡈࠜࠗ࡞ᯏߩ 㘧ⴕ․ᕈࡄࡔ࠲ߩ⇛୯ࠍหቯߔࠆ㧚
㪉㪅㩷 䊌䊤䊐䉤䉟䊦㘧ⴕ⹜㛎㩷
㪉㪅㪈㩷 ᚻᴺ㩷
ᧄቇߩ⢒㙚ߦ߅ߡ㘧ⴕ⹜㛎ࠍⴕ߁㧚ደౝߢࠆߚ㧘᳇⽎᧦ઙߦᏀฝߐࠇࠆߥߊో
⏕ታ߆ߟ➅ࠅߒ㘧ⴕ⹜㛎ࠍታᣉߢ߈㧘ߐࠄߦ㘑ߩᓇ㗀ߦࠃߞߡ㘧ⴕ․ᕈ߇ੂߐࠇࠆߎߣ߇ή
ߚࡄࡈࠜࠗ࡞ߘߩ߽ߩߩ㘧ⴕ․ᕈࠍ⸃ᨆߔࠆ߇น⢻ߢࠆ㧚࠺ࠫ࠲࡞ࡆ࠺ࠝࠞࡔ
2บߦ ࠃߞߡ㧘ዊဳࠫࠦࡦࡄࠣࠗ࠳ታ㛎ᯏߩ㘧ⴕ゠〔ࠍਃᰴర⊛ߦ↹㍳ߒ㧘ߎࠇࠍᐳᮡ࠺
࠲ߦᄌ឵ߒߡቯ㊂⊛ߦࡄࡈࠜࠗ࡞ታ㛎ᯏߩ㘧ⴕ․ᕈࠍᛠីߔࠆ㧚ߐࠄߦ㧘ࠠࡖࡁࡇߩㄫⷺ߿
ᒐᒻ⁁ࠍᄌൻߐߖࠆߎߣߦࠃࠆṖⓨ㧘ᣓ࿁ㆇേߩᄌൻࠍ⺞ߴࠆ㧚
㘧ⴕ゠〔ߩ↹⸘᷹⸃ᨆᚻᴺߪએਅߩㅢࠅߢࠆ㧚߹ߕ㧘⢒㙚ߦ߅ߡᐥ㕙ߩછᗧߩ
⟎ߦਃᰴరᐳᮡߩේὐࠍ⸳ቯߔࠆ㧚ᐳᮡゲߦߟߡߪ㧘ේὐ߆ࠄ㋦⋥ᣇߦ
zゲࠍ㧘ߎࠇߦု⋥
ߦᐥ㕙ߦ
xゲߣ
yゲࠍ⸳ቯߔࠆ㧚x ゲ
l1[m]ߩὐߦࠞࡔ2ࠍ㧘y ゲ
l2[m]ߩὐߦࠞࡔ1ࠍ
⸳⟎ߔࠆ㧚
l1=l2=15[m]ߣߒߡࠆ㧚߹ߚ㧘2บߩࠞࡔߩᤋߩᤨೞวࠊߖߩߚ㧘ᓇߩᦨೋ
ߦࠗ࠻ࠍὐἮᶖἮߒ㧘ᤋߢࠗ࠻߇ᶖἮߒߚ⍍㑆ࠍၮḰᤨೞߣߔࠆ㧚
ᧄ⎇ⓥߢ↪ߔࠆዊဳࡄࡈࠜࠗ࡞ࠫࠦࡦᯏߩⷰ㧘⻉ర㧘߅ࠃ߮ฦㇱฬ⒓ࠍ
Fig.1ߦ␜ߔ㧚
ߎࠇࠍ㧘⢒㙚ߩࠠࡖ࠶࠻࠙ࠜࠢ㧔㜞ᐲ
6.5[m]㧕߆ࠄᚻᛩߍߦࠃࠅṖⓨߐߖࠆ㧚Fig.1 Configuration of the Parafoil.
㪉㪅㪉㩷 ᤋ⸃ᨆ㩷
߹ߕ㧘࠺ࠫ࠲࡞ࡆ࠺ࠝᤋ߆ࠄࡄࡈࠜࠗ࡞ታ㛎ᯏߩ㊀ᔃߩᤨޘೞޘߩ⟎ࠍ
Fig.2ߩࠃ߁ߦ ᬌߔࠆ㧚ߎߩᬺߦߪ㧘Lenox Softworks ␠ߩޟVIDEO POINT2.5ޠࠍ↪ߔࠆ㧚ᰴߦ㧘゠〔ߩ ฦὐߩ↹ߢߩ⟎ࠍ⸥㍳ߔࠆ㧚ߎߩ⟎࠺࠲ߪ㧘Fig.3 ߦ␜ߐࠇߚⷺᐲ
Į㧘ȕ㧘Ȗ㧘įߦኻᔕ ߔࠆ㧚ߎࠇࠄߩⷺᐲ࠺࠲ߣㅀߩ
l1㧘
l2ߩ
6ߟߩ⸘᷹୯ࠍ↪ߡ㧘ᰴᑼߦࠃߞߡ㧘ฦὐߩⓨ㑆 ᐳᮡ(x, y, z)߇ផ▚ߐࠇࠆ㧚
J D
D J
tan tan 1
tan
2tan
1
l
x l ,
J D
J D
tan tan 1
tan
1tan
2
l
y l ,
2
2
1 z
z z
ߚߛߒ㧘
E
J D
J D J
D D
J tan
tan tan 1
tan tan tan
tan 1
tan
tan 2 1 2
1 2 2
1
1 ¿¾½
¯®
¿
¾½
¯®
l l
l l z l
G
J D
J D J
D D
J tan
tan tan 1
tan tan tan
tan 1
tan
tan 2 2 1 2
2 1 2
2 ¿¾½
¯®
¿¾
½
¯®
l l l l
l z
ߎߎߢ
zߩ▚ᑼߦ
z1ߣ
z2߇ࠆ߇㧘੍ታ㛎ߩ⚿ᨐߎߩ
2ߟߩ୯ߩᐔဋ୯߇ታ᷹୯ߦ߶߷৻⥌
ߔࠆߎߣ߇⸃ߞߡࠆ㧚
㪊㪅㩷 ታ㛎⚿ᨐ䈍䉋䈶⠨ኤ
㪊㪅㪈㩷 Ṗⓨᕈ⢻㩷
ࡄࡈࠜࠗ࡞ߩṖⓨᕈ⢻ߪㄫⷺߦࠃߞߡᄌൻߔࠆ㧚ㅢᏱߩࡄࠣࠗ࠳ߢߪ,ࠨࠬࡍࡦ࡚ࠪࡦ
ࠗࡦ߿ࠦࡦ࠻ࡠ࡞ࠗࡦࠍᏀฝဋ╬ߦᒁߊߦࠃߞߡ,㘧ⴕਛߦㄫⷺࠍᄌ߃ࠆߎߣ߇ߢ߈ࠆ㧚ߒ ߆ߒ㧘ᧄ⎇ⓥߩታ㛎ᯏߪ㧘৻ߟߩࠨࡏߢᏀฝߩࠗࡦࠍᏅേ⊛ߦᒁߊᓮᣇᑼߢࠆߚ㧘Ꮐ ฝߩࠗࡦࠍหᤨߦᒁߊߪਇน⢻ߢࠆ㧚ߘߎߢ㧘ࠦࡦ࠻ࡠ࡞ࠗࡦߩ㐳ߐࠍ㘧ⴕᲤߦᄌ߃
Span
Cord at root
Height
Air intakes
Canopy Suspension
line
Control line
⠢㕙Ⓧ㧔ᛩᓇ୯㧕 ট
⠢㧔ᛩᓇ୯㧕 O ᐔဋ⠢ᒏ㐳㧔ᛩᓇ୯㧕 O
⠢ᩮᒏ㐳㧔ᛩᓇ୯㧕 O
⠢┵ᒏ㐳㧔ᛩᓇ୯㧕 O ࠕࠬࡍࠢ࠻Ყ㧔ᛩᓇ୯㧕
࡞ߩᢙ
ో⾰㊂ I
- 32 -
(a) Video image of Camera 1.
(b) Video image of Camera 2.
Fig.2 A trajectory detected from video images.
ǩ Ǫ
ǫ Ǭ
ࠞࡔ
ࠞࡔ
Fig.3 Definition of angles for analyzing trajectory points.
ࠆߦࠃߞߡㄫⷺࠍᄌ߃ࠆߎߣߦߔࠆ㧚ࠦࡦ࠻ࡠ࡞ࠗࡦ㐳ߐࠍၮḰ㐳ߐ߆ࠄ±8[mm]߅ࠃ߮
±16[mm]ߩ4
ㅢࠅߦᄌ߃㧘⸘
5ㅢࠅߩㄫⷺࠍ⸳ቯߔࠆ.ࠦࡦ࠻ࡠ࡞ࠗࡦࠍ㐳ߊߔࠆ߶ߤㄫⷺ߇
ዊߐߊߥࠅ㧘⍴ߊߔࠆ߶ߤㄫⷺ߇ᄢ߈ߊߥࠆ.
5
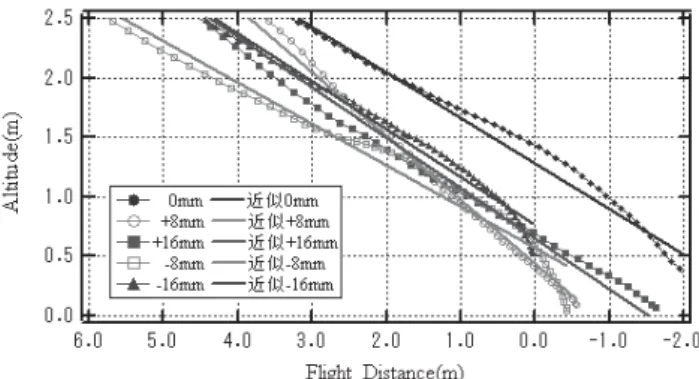
ㅢࠅߩㄫⷺߦኻߔࠆ㘧ⴕ゠〔ߩ㋦⋥㕙ᛩᓇࠍ
Fig.4ߦ␜ߔ㧚㘧ⴕ゠〔ࠍㄭૃߔࠆ⋥✢゠〔ࠍ૬
⸥ߒߡ߅ࠅ㧘ߎߩ⋥✢゠〔ߦኻᔕߔࠆ᳓ᐔㅦᐲ㧘ᴉਅㅦᐲ㧘ṖⓨᲧ㧘߅ࠃ߮឴᛫Ყࠍ
Table 1ߦ␜
ߔ㧚ㄫⷺ߇ዊߐߊߥࠆ⒟ᴉਅㅦᐲ߇Ⴧടߔࠆ߇⸃ࠆ㧚߹ߚ឴᛫Ყࠍᦨᄢߣߔࠆㄫⷺߪࠦࡦ࠻ࡠ
࡞ࠗࡦ㐳-8mm ߩઃㄭߦࠆ㧚ߎߩࠃ߁ߦ㧘ࡄࡈࠜࠗ࡞ߩṖⓨᕈ⢻ߪ⥶ⓨᯏߩṖⓨᕈ⢻ߣ ห᭽ߩ․ᕈࠍߒߡࠆ㧚
x
z y
x z
y
ኻ⽎‛
Fig.4 Flight trajectories of steady-state gliding at several values of angle of attack.
Table 1 Characteristics of steady-state gliding at several values of angle of attack.
ㄫ
ⷺ
ࠦࡦ࠻ࡠ
࡞ࠗࡦ㐳
᳓ᐔ ㅦᐲ
U[m/s]ᴉਅ ㅦᐲ
W[m/s]Ṗⓨⷺ
ș[deg.]
឴᛫Ყ
D L C C
ዊ
ᄢ
+16[mm] 3.44 1.87 28.9 1.84
+8[mm] 3.95 1.70 23.3 2.32
0[mm] 3.32 1.19 19.7 2.79
-8[mm] 3.49 1.21 19.1 2.88
-16[mm] 2.42 1.00 22.5 2.42
㪊㪅㪉㩷 ᣓ࿁ᕈ⢻
Ꮐᣓ࿁ᣇะߩࠬ࠹࠶ࡊᠲ⥽ߦࠃࠆᣓ࿁ᕈ⢻ࠍ㧘ࠠࡖࡁࡇᒻ⁁ߩ㆑ࠃࠆᣓ࿁ᕈ⢻ߩᏅ⇣㧘ㄫ
ⷺߩ㆑ߦࠃࠆᣓ࿁ᕈ⢻ߩᏅ⇣㧘߅ࠃ߮ᠲ⥽ᔕ╵ߩਃὐߦᵈ⋡ߒߡ⸃ᨆߔࠆ㧚
㪊㪅㪉㪅㪈㩷 䉨䊞䊉䊏䊷䈱ᒐᒻ⁁䉕ᄌ䈋䉎䈖䈫䈮䉋䉎ലᨐ
Ꮐฝ┵ߩࠨࠬࡍࡦ࡚ࠪࡦࠗࡦ߅ࠃ߮ࠦࡦ࠻ࡠ࡞ࠗࡦߩ⸘
4ᧄࠍ
10㨇mm㨉ߥߒߪ 20㨇mm㨉⍴❗ߔࠆߎߣߦࠃߞߡ㧘ࠠࡖࡁࡇߩᒐᒻ⁁ߩᦛ₸ࠍᄢ߈ߊߔࠆ㧚ㄫⷺࠍᄌ߃ߕࠠࡖ ࡁࡇᒻ⁁ߩߺᄌ߃ߚ႐วߩ㧘ࠦࡦ࠻ࡠ࡞ࠗࡦᒁ߈㊂
30[mm]ߢߩᣓ࿁ࠍ߁ਃᰴర㘧ⴕ゠〔ࠍ
Fig.5ߦ㧘ᮮᣇะᄌߩጁᱧࠍ
Fig.6ߦ␜ߔ㧚
ࠠࡖࡁࡇߩᒐᒻ⁁ߩᦛ₸߇ᄢ߈ߊߥࠆ⒟㧘ᣓ࿁ᕈ⢻߇ᖡൻߔࠆ߇ࠊ߆ࠆ㧚ߎࠇߪ㧘ᒐ ᒻ⁁ߩᦛ₸߇ᄢ߈ߊߥࠆߦߟࠇ㧘⠢ߩᛩᓇ㕙Ⓧ߇ዊߐߊߥࠅ㧘⠢ߩ឴ജಽᏓ߇ᷫዋߔࠆ㧚ߒ߆ߒ ߎߩ߆ࠄߛߌߢߪ㧘ᣓ࿁߇ᖡൻߔࠆේ࿃ߣߒߡߪਲߒ㧚ࠃߞߡᓟജಽᏓ╬ߦ㑐ߒߡ߽⺞
ᩏߒ㧘ߘߩේ࿃ࠍ⸃ߔࠆᔅⷐ߇ࠆ㧚߹ߚㄫⷺࠍᄌ߃ߡ߽ห╬ߩ⚿ᨐ߇ᓧࠄࠇߡࠆ㧚
㪊㪅㪉㪅㪉㩷 ㄫⷺ䉕ᄌ䈋䉎䈖䈫䈮䉋䉎ലᨐ
3.1
▵ߢㅀߴߚᣇᴺߢㄫⷺࠍᄌ߃㧘ߎࠇߦࠃࠆᣓ࿁ᕈ⢻ߩᏅ⇣ࠍ⺞ߴߚ㧚ᮮᣇะᄌߩጁᱧߦ ߪ㧘ㄫⷺߦࠃࠆᏅ⇣ߪ߹ࠅࠄࠇߥ߆ߞߚ㧚ߒ߆ߒ㧘゠〔ߩ㋦⋥㕙ᛩᓇ㧔Fig.7㧕ࠍࠆߣ㧘឴
᛫Ყ߇ዊߐㄫⷺ᧦ઙߢߪᕆỗߦᴉਅߒߡࠆ߇⸃ࠆ㧚
- 34 -
(a) Baseline. (b)10[mm] shortening. (c)20[mm] shortening.
Fig.5 Flight trajectories for three shapes of the canopy.
Fig.6 Horizontal displacement history of turning flight trajectories for three shapes of the canopy.
Fig.7 Turning flight trajectories at several values of angle of attack.
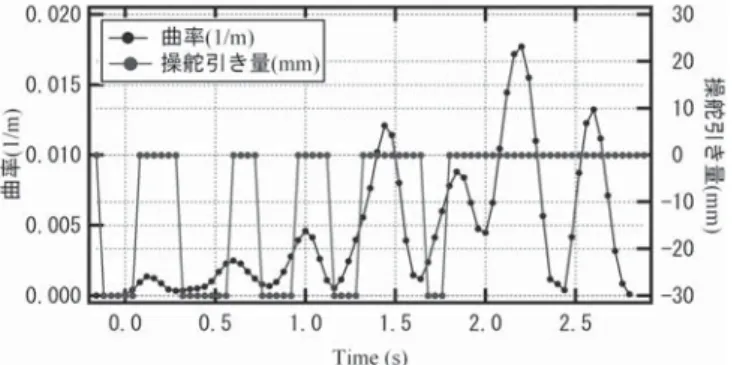
㪊㪅㪉㪅㪊㩷 ᠲ⥽ᔕ╵㩷
ᠲ⥽ߦࠃࠆᣓ࿁ᔕ╵ᕈࠍ⺞ߴࠆߚߦ㧘ࠦࡦ࠻ࡠ࡞ࠗࡦߩᒁ߈㊂ߣߘࠇߦኻᔕߔࠆ㘧ⴕ⚻
〝ߩᣓ࿁ᦛ₸ߩጁᱧࠍ
Fig.8ߦ␜ߔ㧚ㄫⷺ߿ࠠࡖࡁࡇᒻ⁁ߪరߩ߹߹ߢࠅ㧘ࠦࡦ࠻ࡠ࡞
ࠗࡦߩᒁ߈㊂ߪ
30[mm]ߢࠆ㧚ᦨೋߩᠲ⥽ᓟ߅ࠃߘ 0.08[s]એౝߦᣓ࿁߇ᆎ߹ߞߡࠆ㧚߹ߚ㧘ᦼ
0.4⑽ߩᮮᝄേ㧔ᝄࠅሶㆇേ㧕ࠍ␜ߒߥ߇ࠄ㧘ᠲ⥽ࠍ➅ࠅߔߦߟࠇߡᐔဋ⊛ߥᣓ࿁ᦛ₸߇ ᄢ߈ߊߥߞߡࠆ㧚ᠲ⥽⚳ੌᓟߪ㧘ᮮᝄേࠍ➅ࠅߒߥ߇ࠄᐔဋ⊛ߥᣓ࿁ᦛ₸߇ᷫዋߒߡ߅ࠅ㧘 ቯᏱṖⓨ⁁ᘒ߳ߩᓳరᕈ߇␜ߐࠇߡࠆ㧚
ࠠࡖࡁࡇߩᒐᒻ⁁ࠍᄌ߃ߡห᭽ߦᠲ⥽ᔕ╵ࠍ⺞ߴߚ⚿ᨐࠍ
Table 2ߦ␜ߔ㧚ࠠࡖࡁࡇߩ
ᒐᒻ⁁ߩᦛ₸ࠍᄢ߈ߊߔࠆ߶ߤ㧘ᠲ⥽ᔕ╵ᕈ߇ૐᷫߒ㧘ห⒟ᐲߩᣓ࿁ᦛ₸ࠍᓧࠆߩߦᔅⷐߥᠲ⥽
ᤨ㑆߇ᄢ߈ߊߥߞߡࠆ㧚
-8 -7 -6 -5 -4 -8 -7 -6 -5 -4
4
6 -8 -7 -6 -5 -4
4 6
4 6 1.0
1.5 2.0 2.5 3.0
1.0 1.5 2.0 2.5 3.0
x(m)
y(m) z(m)
-10 -8 -6 -10 -8
-6 2
4 -10 -8
-6
2 4
2 4 0.5
1.0 1.5 2.0 2.5 3.0
0.5 1.0 1.5 2.0 2.5 3.0
x(m)
y(m) z(m)
-10 -8 -6 -4 -2 -10 -8 -6 -4 -2
2 3
4 -10 -8 -6 -4 -2
2 3
4
2 3
4 1.0
1.5 2.0 2.5 3.0
1.0 1.5 2.0 2.5 3.0
y(m) x(m)
z(m)
㪋㪅㩷 䉲䊚䊠䊧䊷䉲䊢䊮䈮䉋䉎㘧ⴕ․ᕈ䊌䊤䊜䉺䊷䈱หቯ
⥄↱ᐲߩ㘧ⴕജቇࠪࡒࡘ࡚ࠪࡦࠍⴕ㧘 㘧ⴕ⹜㛎ߢߩ㘧ⴕ⚻〝ࠍౣߔࠆߎߣࠍㅢߒߡ㧘 ฦ⒳ߩ㘧ⴕ․ᕈࡄࡔ࠲ߩ⇛୯ࠍផቯߔࠆ㧚ቯᏱṖⓨߦ㑐ߔࠆ㘧ⴕ⹜㛎࠺࠲ߣࠪࡒࡘ
࡚ࠪࡦ⚿ᨐࠍ
Fig.9ߦ␜ߔ㧚ߎߩߣ߈ߩࠪࡒࡘ࡚ࠪࡦߦ↪ߚ㘧ⴕ․ᕈࡄࡔ࠲ߩ৻ㇱࠍ
Table 3
ߦ␜ߔ㧚㒠ਅⷺߦᐞಽ㆑߇ࠄࠇ㧘ࠪࡒࡘ࡚ࠪࡦߦ↪ࠆ㘧ⴕ․ᕈࡄࡔ࠲ߦ⺞
ᢛߩ߇ࠆ㧚
㪌㪅㩷 ⚿㩷 ⸒
ዊဳࡄࡈࠜࠗ࡞㘧ⴕታ㛎ᯏࠍ↪ߡደౝߢ㘧ⴕ⹜㛎ࠍታᣉߒ㧘ߘߩ㘧ⴕᤋࠍ⸃ᨆߔࠆߎߣ ߦࠃߞߡ㧘ࡄࡈࠜࠗ࡞ߩṖⓨᕈ⢻㧘ᣓ࿁ᕈ⢻㧘߅ࠃ߮ᠲ⥽ᔕ╵ࠍቯ㊂⊛ߦ⺞ߴߚ㧚߹ߚ㧘ㄫⷺ
߿ࠠࡖࡁࡇᒐᒻ⁁ࠍᄌ߃ࠆߎߣߦࠃࠆലᨐ߽⺞ߴߚ㧚ߐࠄߦ㧘⥄↱ᐲࠪࡒࡘ࡚ࠪࡦߦ ࠃߞߡ㘧ⴕ⹜㛎ߩ㘧ⴕ⚻〝ࠍౣߒ㧘㘧ⴕ․ᕈࡄࡔ࠲ߩ⇛୯ࠍหቯߒߚ㧚੍⊛ߥ᳓Ḱߢ ߪࠆ߇㧘࿖ౝߢߪೋߡ㧘ࡄࡈࠜࠗ࡞㘧ⴕߩታ㓙ߩ㘧ⴕߦ߅ߌࠆ㘧ⴕ․ᕈ࠺࠲ࠍቯ㊂⊛
ߦขᓧߢ߈ߚ㧚
ෳ⠨ᢥ₂
(1)
⿒ဈ ผ㧘ޟࡄࠣࠗ࠳ߩ㘧ⴕ․ᕈߦ㑐ߔࠆ⎇ⓥޠ 㧘᧲ᶏᄢቇᄢቇ㒮ඳ჻⺰ᢥ(1998)㧚
(2)᧲ ᤘ㧘ޟࡄࠣࠗ࠳ߩ․ᕈޠ㧘ᣣᧄ⥶ⓨදળ㧘(1996)㧚
(3)
㋈ᧁ㧘߶߆㧘ޟ㘧ⴕᯏߣࡄࠣࠗ࠳ߦ߅ߌࠆᮮំࠇᠲ⥽ᔕ╵․ᕈߩ⋧㆑ࡔࠞ࠾࠭ࡓޠ㧘ᣣ ᧄ⥶ⓨቝቮቇળ⺰ᢥ㓸㧘Vol.55㧘No.642㧔2007㧕 㧘pp.337-343㧚
(4)
’㊁ శ㓶㧘ޟ㘧ⴕജቇߩၮ␆ޠ㧘↥ᬺ࿑ᦠᩣᑼળ␠㧔1980-2㧕㧚
(5)
ᩉ ੫ੑ㧘ޟ⥶ⓨᯏߩㆇേ⸃ᨆࡊࡠࠣࡓޠ 㧘↥ᬺ࿑ᦠᩣᑼળ␠㧔2007-7㧕㧚
- 36 -
Fig.8 Lateral control response.
Table.2 Effects of the canopy shape on the lateral control response.
ࠠࡖࡁࡇߩᒐᒻ⁁
ᠲ⥽ᤨ㑆 [s]
ᠲ⥽ᒁ߈㊂ [mm]
㘧ⴕ⚻〝ߩ ᣓ࿁ᦛ₸[1/m]
ᄌൻߥߒ 0.16 30 2.5010-3 Ꮐฝ┵ࠗࡦࠍ-10[mm]⍴❗ 0.24 30 3.1310-3 Ꮐฝ┵ࠗࡦࠍ-20[mm]⍴❗ 0.24 30 1.1710-3
Fig.9 Comparison between an experimental flight trajectory and corresponding results of simulation.
Table 3 Characteristic properties of the parafoil experimental vehicle used for simulation of steady-state gliding.
Property Notation Value
ǩ= -15 deg ǩ= 0 deg ǩ= 15 deg
Lift coefficient CLD -0.110 0.330 0.690
Pitching moment coefficient
m D
C 0.034 0.014 -0.047
Rolling stability ClE -0.035
Yawing stability CnE 0.032