微視的道路交通シミュレータMITRAMによる広域交通解析
10
0
0
全文
(2) Vol. 46. No. SIG 17(TOM 13). 微視的道路交通シミュレータ MITRAM による広域交通解析. 47. タのハード的な処理能力の飛躍的な向上と,分散並列 処理などのソフト技術の発達から,ミクロシミュレー タでも広範囲の大規模演算を低コストで行える可能性 が出てきた.こういった背景からミクロシミュレータ として,交差点間のリンクを短い固定長ブロックに分 けてブロック間の自動車の移動を車両密度をもとに決 定するブロック密度法3)∼6) ,交差点やその接続リン クを自動車の車長程度のメッシュに区切り,そのメッ シュ間の自動車の移動にペトリネットを使う方法7) , 判別フローを使う方法8) ,セルオートマトンを使う方 法9),10) ,など様々なアプローチが提案されてきた.こ れらの手法はそれぞれに特徴を有し,有効性も認めら れている.我々も今日のコンピュータの高い処理能力 をフルに活かした,既存のシミュレータとは異なるア. 図 1 MITRAM システム概要 Fig. 1 Architecture of MITRAM system.. プローチによる,より精緻なシミュレーションを目指 した,ミクロ道路交通シミュレータ MITRAM(MIcroscopic model for analyzing TRAffic jaMs in the. ための前提条件などの各種情報である.これらデー. city area)を研究・開発してきた11),12) . ところでミクロシミュレータでは,シミュレーション の条件となる交通需要に関して,需要が生じる点(始. る.この情報はシミュレーション開始前に静的な情報. 点)とそれに対する目的地(終点),さらにはその間. ともできる.これらの情報に基づいて構築されるのは. の走行計画(経路)を組合せとした膨大な種類の OD. 道路モデル,車両発生モデル,運転動作モデルである.. 交通量を推定,設定しなくてはならず,その条件設定. 道路モデルは車両の走行する道路の形状や信号機,停. は容易ではなく,広域シミュレーションを実用的に行. 止線といった道路付帯設備の情報である.車両発生モ. ううえで,大きな課題となる.そこでこの 1 つの解決. デルは,シミュレーションの各時点での道路端点から. 策として,本論文では MITRAM において,道路網を. の車両発生の情報を持つ.そして,運転動作モデルは. 交差点を主体としてその接続で表現して,種々の交通. シミュレータ内で走行する車両が自律的に運転判断を. 量に対処する交差点ネットワークモデルを提案し,そ. 行うための論理を提供する.道路状況は図の中央部に. の有効性を論じる.. 位置する走行データ管理部に集約される.MITRAM. まず 2 章では本論文のシミュレーション環境である MITRAM について概要を述べ,3 章で我々が提案す る交差点ネットワークモデルの詳細と有効性を示す.. は車両を主体としたシミュレータであり,管理される. そして 4 章では実交通のシミュレーションに本モデル. 両の操作判断を得る.これを再び交通状況へ反映させ. を適用した結果を述べ,5 章で結論を述べる.これら. る.この繰返しによって交通状況の変化をシミュレー. を通して,シミュレータ MITRAM およびそこに導. トする.そしてシミュレーション結果は最終的に統計. 入した交差点ネットワークモデルの実用性について論. 情報やアニメーションとして出力される.. じる.. 2. MITRAM. タベースからモデルを生成し,シミュレータに入力す として与えることを基本とするが,必要に応じてシ ミュレーション中に動的に与えたり変更したりするこ. 情報は主に車両の位置,速度などである.この情報を 各車両が持つ運転動作モデルに渡し,戻り値として車. 2.2 道路モデル MITRAM では実交通において車両が走行しうる軌 跡をシミュレータにあらかじめ設定する.これを仮想. 2.1 システム概要 MITRAM は個々の車両挙動を精緻に再現するミク ロなアプローチに基づく道路交通シミュレータである.. 走行レーンと呼び,この集合として道路モデルを形成. このシミュレータがターゲットとするのは主に市街地. 両はこの仮想走行レーンをなぞるように走行する.こ. する.図 2 に道路モデルを構成する仮想走行レーン の概念を示す.シミュレーションにおいて走行する車. の交通解析である.. の図では T 字路における仮想走行レーンの設定を例. MITRAM のシステム概要を図 1 に示す.図中の 上部に示す各データベースはシミュレーションを行う. として示している.現実の交通において,走行車両は 進路ごとにほぼ同一の軌跡を描いて走行する.すなわ.
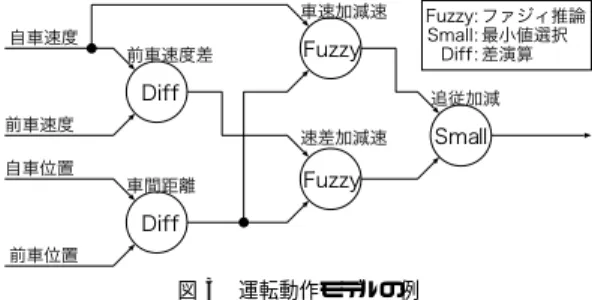
(3) 48. 情報処理学会論文誌:数理モデル化と応用. Dec. 2005. 図 3 運転動作モデルの例 Fig. 3 Example of drivers maneuvering model.. たネットワークモデルで構築する.モデルの構築にあ たって,我々は現実の運転者がどのように周辺状況を 図 2 道路モデル概要 Fig. 2 Outview of road-model.. 認知し,判断を下しているかに注目し,できるだけ忠 実にモデルに取り込むこととしている.そこでまず, 現実の運転者が行っている判断が以下の原則に従うも. ち,現実の運転者は道路の物理的形状や周辺の交通要. のとする.それは. 因を考慮して,自らの走行軌跡を脳裏に描いているも. • 他の車両の後面に衝突しない(追従論理). のと仮定し,その軌跡をあらかじめ仮想走行レーンと. • 他の車両の前面に衝突しない(対向論理) • 他の車両の側面に衝突しない(側方論理) • 車両以外に衝突しない(前方論理). して用意する.これによりシミュレーションの演算処 理や運転動作モデルからステアリング操作を省くこと を可能にしている.. である.そして,これらの原則を満たすモデルを個別. 仮想走行レーンが分岐,合流,交錯する部位につい. に構築し,並列に駆動することで現実の運転者に近い. ては,その種類と位置,通行の優先順位を付加情報と. 運転判断を行える機能としている.具体的な実現方法. して与える.この情報はシミュレーション中に各車両. として我々は推論ネットワーク型の論理モデルを提案. の運転動作モデルに入力として与えられ,運転動作の. し,上で述べた各論理に相当する運転動作モデルを構. 決定の条件となる.. 築してきた14)∼16) .. 2.3 運転動作モデル. 運転動作モデルの実装例として図 3 に追従運転の. 個々の車両挙動を扱うミクロ手法の道路交通シミュ. モデルを示す.このモデルは前方の車両に対して,適. レータでは,一般に車両追従モデルと呼ばれる車両の. 切な車間距離を保ちながら衝突することなく追従走行. 移動規則を構築する必要がある.このモデルはシミュ. するための運転判断を決定する機能を持っている.図. レータの精度を決定づける重要な要素であるため,古. 中の左側に示される各項目を入力とし,2 入力 1 出力. くから様々な手法でのモデル化が行われている.たと. の演算子によって多段に組まれた論理構造となってい. えば最小移動距離によって一定時間後の車の更新位置. る.各演算子にはファジィ推論をはじめとして数値演. を求める方法13) や個々の自動車の動きを 2 階微分方. 算や 2 値論理など任意の 2 入力関数を定義できる.こ. 程式で表現する方法などである.しかし,これらのモ. のモデルと同様に上で述べた他の論理に関してもモデ. デルは前方の車両に自車両が追従している場合の挙動. ルを構築し,それらを並列に接続することで総合的に. のみを再現するものであり,交差点での右左折や車線. 周辺交通に対処して適切な運転挙動を決定できる運転. 変更,駐停車車両の回避などの多様な交通行動に対処. 動作モデルが完成する.. できるものは少ない.. 2.4 車両発生モデル. MITRAM の運転動作モデルは,上述の車両追従モ デルと同様に車両の移動を決定するモデルでが,より 多様な交通行動にも対応できる汎用性の高いモデルを. 渋滞解析を目的とした道路交通シミュレータにおけ る車両発生は,シミュレーションの前提条件として非. 提供している.モデルの基本的なコンセプトは,個々. け精緻に再現しても,車両の発生を正しく再現できな. 常に重要な要素である.道路構造や車両挙動をどれだ. の車両がその運転者の立場から得られる情報に基づ. ければ交通解析の目的を達せられない.MITRAM で. いて自ら適切な挙動を決定できる自律性を持たせると. はシミュレータの幅広い利用目的に対応できるように,. いう点である.その論理はファジィ推論をベースとし. 車両発生に関して厳しい制約は設けずに自由な設定が.
(4) Vol. 46. No. SIG 17(TOM 13). 微視的道路交通シミュレータ MITRAM による広域交通解析. 49. 表 1 車両発生ダイアグラム Table 1 Diagram of vehicle generation. 車両番号. 発生時刻. 発生場所. 走行ルート. 車種. 1 2 3 4 :. 0:00:01 0:00:03 0:00:07 0:00:10 :. A B C A :. 1 2 3 5 :. 普通車 大型車 バス バイク :. 可能なモデルを採用している.具体的には表 1 に示す ように,車両の発生時刻,車種,発生場所,走行ルー ト,車種を定義し,それに従ってシミュレータ内で車 両を発生させる. したがって車両発生の設定は,特定の確率分布など に限定せずに自由に設定できる設計となっている.確 率分布に従った車両発生が必要な場合は,シミュレー ションプロセスとは別に,表 1 に示すような情報を前 処理して生成すればよい.また同表に示した時系列の 車両発生スケジュールはシミュレーション実行中に外. 図 4 交差点ネットワークモデル概要 Fig. 4 Outline of intersection netowork model.. 部からアクセスすることも可能であり,リアルタイム に発生交通量を変化させることも可能である.. 要する車両経路は各モジュール内で設定することが可 能となり,広域を解析範囲とした場合でも始点,終点. 3. 交差点ネットワークモデル. の組合せによる膨大な数の経路を扱わずにすむ.各交. 3.1 モデル概要 道路交通シミュレータにおいて道路網の表現方法は, シミュレータの特性を決定づける重要な要素の 1 つで. 差点モジュールは互いに独立しているが,その内部で. ある.特に広域を対象とするシミュレータを構築する. 接続部分では交通流の連続性を損なうことなく,また. 場合には,道路網を定義するための設定情報が肥大化,. 渋滞の伝搬なども正しく反映するための手段を講じる.. 複雑化しやすく,その設定自体が繁雑になるのと同時. 次節以降に交差点モジュールとその接続について詳細. に交通需要の設定などを難しくする危険性がある.し. を述べる.. たがって,その設計は慎重に行う必要がある. の増大を避けるために,マクロなアプローチを用い. 3.2 交差点モジュール 交差点モジュールの概要を図 5 に示す.ここでは 典型的な 4 肢交差点を例としてあげている.この図に. るのが一般的である.しかし,市街地の交通では,比. 示すように,交差点モジュールは交通の流入端と流出. 較的狭い範囲で起きた交通現象の影響が広域に伝搬. 端を結ぶ複数の仮想走行レーンの接続で表現する.流. することが珍しくない.したがってミクロアプローチ. 入端から流出端に至るまで接続された仮想走行レーン. によるシミュレータでないと精度良い解析が行えない. の列をルートと呼ぶ.通常は交差点モジュール内のす. 場合が多い.ミクロアプローチとしては,ブロック密. べての流入端からすべての流出端への組合せ分だけの. 広域交通を対象としたシミュレーションでは計算量. 5),6). 9),10). は分岐や合流,交錯などの状況を考慮した車両挙動を ミクロに再現する.さらに,隣り合うモジュール間の. を用いたシミュ. ルートを持つが,本モデルでは 1 交差点ごとに分割し. レータを広域交通解析に適用した事例があるが,容易. たモジュールを用いるため,ルート数はそれほど大き. に実測できない OD 交通量を必要とするなど,シミュ. くはならない.この図の場合は 4 つの流入路に対して. レーション条件の設定に課題があると考えられる.. 右折,直進,左折の 3 つの進路があるため,合計で 12. 度法. やセルオートマトン法. 本論文で提案する交差点ネットワークモデルは図 4 に示すように,道路網を交差点モジュールとその接続. ルートとなる. モジュール内においては左折や右折のための分岐,. により表現する.つまり,本モデルは規模の大きいシ. 合流部や右折と対向直進などの交錯部が存在する.こ. ミュレーションを 1 交差点程度を範囲とした小さなシ. の部分に関してはその形状や通行権の優劣を付加情報. ミュレーション単位に分解する.これにより,設定を. として交差点モジュールの定義に加える.この情報は.
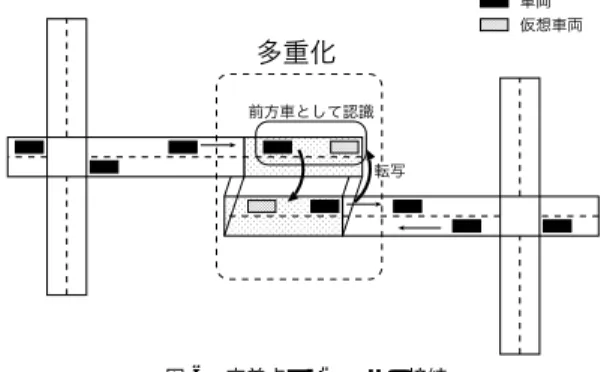
(5) 50. 情報処理学会論文誌:数理モデル化と応用. Dec. 2005. 図 6 交差点モジュールの接続 Fig. 6 Connection of intersection module.. いる.つまり,交差点モジュールの流入部には右折, 左折,直進など進路別のルートが用意されており,そ れらの進路をとる割合,すなわち交差点分岐率に従っ 図 5 交差点モジュール概要 Fig. 5 Outview of intersection module.. てモジュール間の車両遷移を行うことも接続部の役割 である.本モデルではさらに,上流側で車両がとった 経路によって条件付き確率で分岐率を定義することも. 走行する車両に対して提供され,他車両との関係を認. 可能である.したがって本モデルは単純な確率分岐は. 識させる.なお,この情報に基づいて交錯車両の通過. もちろん,OD 情報を用いた経路設定も行うことがで. を待つかどうかなどの最終的な判断は運転動作モデル. きる.. において行う. 信号機のある交差点を扱う場合には,交差点の流入. 4. シミュレーションモデルの検証. 路ごとに個別に信号現示を与えることができる.その. 本論文で提案した交差点ネットワーク型の道路モデ. ため右折矢信号などを含め特殊な信号パターンも扱う. ルによるシミュレーションを行い,提案した交差点ネッ. ことができる.信号現示の切替えは 1 秒単位のシーケ. トワークモデルの有効性を検証する.まず,交差点モ. ンスをあらかじめ設定する方式と,TCP/IP などの通. ジュール内での車両挙動の検証のために孤立交差点を. 信によって外部から動的に制御する方式を用意してい. 対象としたシミュレーションを行う.そして,それを. る.これにより一般的な定周期制御はもちろん,交通. 複数接続した道路網でのシミュレーションを行い,モ. 状況によって動作を変動させる感応制御も行うことが. ジュール間の接続の検証を行う.さらに,実交通にお. できる.. ける広域を対象としたシミュレーションを行う.. 3.3 交差点モジュールの接続. 4.1 孤立交差点シミュレーション. 交差点モジュールの接続が持つ主要な役割は,モ. ここでは,ミクロな観点からの検証として 1 つの交. ジュール間の車両の移動を管理することである.互い. 差点モジュール内での車両挙動について検証する.交. に独立したモジュール間で交通流の連続性を保持する. 差点モジュール内での車両には前方の車両に追突しな. ための工夫が必要である.そこでモジュール接続部を. い「追従運転論理」の他に右折を行う際の判断や分岐,. 図 6 に示すように道路の一部を多重化して構築する.. 合流地点での側方車両の影響などを考慮した自律走行. 多重化された道路上を走行する車両の情報は相互に. モデルを持たせている.それにより,現実の交差点付. 転写され,各レーン上の車両が互いの車両情報を共有. 近交通と同様の車両挙動を再現できる.ここでは,そ. することで,各車両は同一車線を走行する車両として. の状況再現を検証するために,図 7 に示す 4 肢交差点. 認識することができる.あとは,多重化区域内で上流. を対象にしたシミュレーションを行う.交通需要,交. モジュールから下流モジュールへ車両の移し替えを行. 差点分岐率も同図に示す.この交通環境下で約 30 分. えば,交通流の連続性を損ねることなく,独立したモ. 間のシミュレーションを行った.シミュレーション結. ジュール間の接続が実現する.. 果はアニメーション出力を目視により検証した.さら. 交差点モジュールには 1 つの流入路に対して複数の. に定量的な評価のために,信号制御の変更による交通. ルートを設定することで交差点での車両分岐を行って. 流の変化を遅れ時間の計測で求め,交通工学的に既知.
(6) Vol. 46. No. SIG 17(TOM 13). 微視的道路交通シミュレータ MITRAM による広域交通解析. 51. 図 7 孤立交差点シミュレーションの交通環境 Fig. 7 Traffic environments of isolated intersection.. な特性との比較で,モジュール内の車両挙動の妥当性 を検証した.シミュレーションによって求めた遅れ時 間の結果を図 8 に示す.このグラフは横軸に主要道路 の青時間,縦軸に従道路の青時間をとり,遅れ時間の. 図 8 孤立交差点の遅れ時間計測結果 Fig. 8 Results of delay time on isolated intersection.. 大きさを濃淡で示している.このグラフで遅れ時間が 最小となるのは主道路の青時間 20 秒,従道路の青時 間 11 秒の点である.黄色時間と全赤時間を加えると サイクル長 41 秒,となり主/従の現示率 61%が最適 な信号制御設定となる.交通工学で古くから用いられ る Webseter の公式17) による算定ではサイクル長 42 秒,現示率 66%となる.以上の結果から,この実験で 行った孤立交差点のシミュレーションは,遅れ時間の 観点からは現実の交通特性を高い精度で再現できてい. 図 9 3 交差点シミュレーションの対象道路 Fig. 9 Road model for 3 intersections simulation.. るといえる.. 4.2 複数交差点モジュールのシミュレーション. シミュレーション結果を図 10 に示す.この図はシ. 本論文で提案する交差点ネットワークモデルの主要. ミュレーション結果のアニメーションを 1 秒ごとに切. な利点は,広い範囲の交通を対象とした場合でも,道. り出したものである.図中で左から右に進行する先頭. 路モデルを不必要に複雑にすることなく,またシミュ. の 2 台の車両に注目すると,モジュールの接続部で. レーションの前提条件である交通需要の設定を簡便. ある多重化区域内でも追従関係に乱れはなく,連続的. 化できる点にある.ここでは,シミュレーションの規. に遷移している様子が分かる.また,飽和状態でのシ. 模を広げるための最初のステップとして,複数の交差. ミュレーションでは図 11 に示すように,モジュール. 点を対象範囲にしたシミュレーションを行う.ここで. 接続部をまたいだ渋滞の延伸も再現できている.この. の目的は交差点モジュール間の車両移動において車両. ことから交差点モジュール間での交通流の連続性が確. の追従関係が保たれていることを検証することにあ. 保されていることを確認し,本モデルのモジュール接. る.まず図 9 に示すように連続交差点の道路網を 3 交. 続部での車両挙動の妥当性を確かめた.. ジュール間の車両遷移を観測するために,この道路網. 4.3 実交通のシミュレーション 4.3.1 7 交差点シミュレーション より現実の交通問題に本シミュレータを適用し,そ. に対して交通流が非飽和(空いている状態)となる場. の有効性を検証する.ここでは高知県高知市の国道 32. 差点分のモジュールに分割して構成する.そして,各 モジュール間を接続してシミュレーションを行う.モ. 合と飽和(渋滞した状態)となる場合の 2 つの交通需. 号線沿い 7 交差点を含む道路網を対象にしたシミュ. 要を設定してシミュレーションを行い,モジュール間. レーションを行う.この路線の概略を図 12 に示す.. 接続部の様子をアニメーション出力により観察する.. この道路網を 7 個の独立した交差点モジュールとその.
(7) 52. Dec. 2005. 情報処理学会論文誌:数理モデル化と応用. 図 12 高知県高知市国道 32 号線の連続 7 交差点概略 Fig. 12 Outline of actual 7 intersections.. 表 2 感知器データの例 Table 2 Example of data of detectors.. 図 10 モジュール間の車両遷移 Fig. 10 Vehicle transition on inter-modules.. 時刻 (時:分). 車両通過台数 (台/5 分). 平均速度 (km/h). 占有率 (%). 6:00∼6:05 6:05∼6:10 6:10∼6:15 :. 52 72 66 :. 45 35 35 :. 7 13 12 :. 表 3 従来モデルと提案モデルの設定パラメータ数の比較 Table 3 The comparison between past model and proposed model.. 提案モデル 従来モデル. 経路設定数. 交差点分岐率. 18 270. 84 -. は対象地域における 2003 年 5 月 13 日(平日)の朝. 6 時から 9 時 30 分にかけての各感知器データをあら かじめ取得しておき,このデータを時系列的にシミュ レータに与える方法で,疑似的なリアルタイムシミュ レーションを行った.なお,各感知器のデータは,管 理する当該警察の協力を得て入手した. ここで感知器から得られるデータは表 2 に示すよ うな 5 分集計値であり,それぞれの感知器直下でのそ の時間帯の車両通過台数と平均速度,道路占有率が得 図 11 モジュール間の渋滞延伸 Fig. 11 Traffic propagation on inter-modules.. られる.この情報に基づいてシミュレーション上での 車両発生の割合と交差点分岐率を決定する.これによ り,実際の交通状況をリアルタイムでシミュレータ上. 接続で表現し,シミュレーション用の道路モデルを構 築した.この図からも分かるとおり,この路線には多. に再現させる. 以上の条件でシミュレーションを行う場合について,. 数の車両感知器が設置されている.この実験では,こ. 提案モデルと OD 交通量を設定する従来モデルの設定. の感知器データを利用して解析範囲の道路端点での車. パラメータ数の比較を表 3 に示す.従来モデルでは,. 両の発生量と各交差点分岐率を決定する.ただし,感. 車両の発生位置,目的地の組合せ分の交通需要を設定. 知器データだけではそれらを決定するための情報が不. する必要がありパラメータ数が非常に多くなるが,提. 足しているので,一部は現場の観測値を用いた.. 案モデルではシミュレーション範囲の端点からの車両. 感知器データは,時々刻々と得られる時系列のデー. 発生数のみを設定するためパラメータ数は少なくてす. タである.このデータをリアルタイムでシミュレータ. む.ただし,提案モデルでは新たに交差点分岐率を設. に取り込んで利用することも可能であるが,本実験で. 定する必要がある..
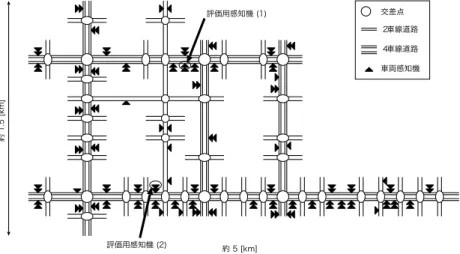
(8) Vol. 46. No. SIG 17(TOM 13). 微視的道路交通シミュレータ MITRAM による広域交通解析. 53. 図 14 高知県高知市の市街地 42 交差点を含む道路網 Fig. 14 The road network of actual 42 intersections.. 表 4 広域道路網の設定パラメータ数の比較 Table 4 The comparison between past model and proposed model.. 提案モデル 従来モデル. 経路設定数. 交差点分岐率. 86 7,310. 504 -. 手法のように,シミュレーションの設定パラメータ数 を少なく抑える簡便なモデルを用いても,シミュレー ションの精度には大きく影響を与えないことが明らか である.以上より,シミュレーション条件を簡易に設 定できる提案モデルの有効性が確認できた.. 4.3.2 広域交通解析 本論文で提案する交差点ネットワークモデルを広域 交通シミュレーションに適用する.図 14 は前項の 7 交 図 13 実交通感知器データと仮想感知器(従来モデル,提案モデ ル)データの相関 Fig. 13 Correlation between actual traffic detector and simulated traffic detector (established model and proposal model).. 差点の道路網からさらに範囲を拡大した 42 交差点を 含む道路網である.この道路網を提案する交差点ネッ トワークでモデル化し,前項と同様に現場の車両感知 器データを用いて各交差点の分岐率と交通需要を設 定する.この道路網を提案モデルを用いてシミュレー. シミュレーション結果の評価として,現実の交通状. ションする場合に要求される設定パラメータ数を表 4. 況との比較を行う.ここでは車両発生に用いなかった. に示す.従来モデルでは経路の設定数が交差点数の増. 感知器データと,シミュレータ上に仮想的に配置した. 加にともなって膨大になり,シミュレーション設定が. 感知機の出力値を比較した.図 13 に従来手法および. 非常に困難になるが,提案モデルでは現実的な範囲に. 提案手法を用いた場合の比較を示す.グラフは評価用. 収まっている.. 感知器における 5 分ごとの車両通過台数を示してい. シミュレーションは前項と同様に 2003 年 5 月 13 日. る.各結果はともに相関係数 0.85 以上であり現実の. (平日)の朝 6 時から 9 時 30 分までの時間帯である.. データとよく一致したものなっている.また両者のシ. シミュレーションの様子を図 14 に示す.このシミュ. ミュレーション精度に大きな違いは見られない.この. レーションでは開始から終了までに累計で約 60,000 台. ことから,MITRAM は車両感知器データを用いるこ. の車両が走行し,同時に最大で約 3,000 台が走行した.. とで現実の交通の様子を精度良く再現でき,また提案. シミュレーションの結果について,図 15 に示す評.
(9) 54. 情報処理学会論文誌:数理モデル化と応用. Dec. 2005. 図 15 広域シミュレーションの様子 Fig. 15 Appearance of wide area simulation.. 価用の感知器データと比較した.その結果を図 16, 図 17 に示す.シミュレーション結果はともに実デー. 図 16 実交通感知器と仮想感知器の比較 1 Fig. 16 Comparison between actual traffic detector and simulated traffic detector1.. タに対して相関係数 0.85 以上であり,現実の交通状 況が時々刻々変動する複雑な挙動であることを考える と,おおよその傾向をよく再現しているといえる.. 5. お わ り に 本論文では,道路交通シミュレータ MITRAM を 広域な対象へ適用するために,交差点モジュールとそ の接続による交差点ネットワークモデルを提案し,実 交通解析に応用した.提案した交差点ネットワークモ デルは仮想走行レーンを基本とするミクロな視点での 精緻なシミュレーションを複数のモジュールで独立に 行うとともに,モジュール間の接続に連続性を確保す ることで広域的にも交通流に矛盾を生じないようにし た.そして,孤立交差点,連続交差点の各シミュレー ションを行い,本モデルを用いたシミュレーションの 基本的な動作を検証した.さらに,実交通を対象とし た連続 7 交差点のシミュレーションを行った.このシ. 図 17 実交通感知器と仮想感知器の比較 2 Fig. 17 Comparison between actual traffic detector and simulated traffic detector2.. ミュレーションにおいては実交通から得られる車両感 知器データをリアルタイムに利用して交差点分岐率な. ションモデルの有効性と実用性を確認した.. どを逐次更新することによって,現実に近い交通需要. 現実の交通問題にシミュレータを適用する場合,シ. をシミュレータ内に生成した.そしてシミュレータに. ミュレーション条件として必要な情報が十分に得られ. 仮想的に設置した車両感知器と実交通での車両感知器. ない場合が多く,また仮に十分な情報が得られたと. データとの比較でシミュレーション精度を検証した.. してもそれをシミュレータに反映させるのに非常に. また従来モデルとの比較で提案モデルでも同程度の精. 繁雑な手続きを要する場合もある.本論文で提案し. 度を得ることができ,経路設定などの設定パラメータ. た MITRAM の交差点ネットワークによるシミュレー. 数が格段に少なくてすむ本モデルの有効性を検証した.. ションモデルは,シミュレーション条件や車両挙動の. さらに広域な交通解析として 42 交差点を含む道路網. 設定などに柔軟性と簡便性を有しており,特に広域交. のシミュレーションを行い,これについても実データ. 通を対象にしたシミュレーションにおいて有効に利用. との比較で精度の検証を行った.以上の結果から,本. できるものと考える.. 論文で提案した交差点ネットワークによるシミュレー. 本論文で述べた広域シミュレーションを現在実際の.
(10) Vol. 46. No. SIG 17(TOM 13). 微視的道路交通シミュレータ MITRAM による広域交通解析. 信号制御の最適化解析に用いており,MITRAM の実 用レベルでの有効性を確認している.今後はさらに実 際の交通状況におけるより精緻な渋滞解析や大気汚染 物質排出量推定などへも使用していく予定である. なお,本研究は科学研究補助金(課題番号 15560345) の支援に基づくものである.. 参. 考 文. 献. 1) 栗本 譲:道路交通流解析のディジタル・シミュ レーション・モデル,土木学会論文集,No.320, pp.137–148 (1982). 2) 斎藤 威:交通渋滞予測のための道路交通現象 の再現,電気学会誌,Vol.117, No.9, pp.600–603 (1997). 3) 桑原雅夫:広域ネットワーク交通流シミュレー ション,自動車技術,Vol.52, No.1, pp.28–34 (1998). 4) 堀口良太,片倉正彦,桑原雅夫:都市街路網の 交通流シミュレータ AVENUE の開発,第 13 回 交通工学研究発表論文報告集,pp.33–36 (1993). 5) 棚橋 巌,北岡広宣,馬場美也子,森 博子, 寺田重男,寺本英二:広域交通流シミュレータ NETSTREAM,情報処理学会研究報告,ITS-92, pp.9–14 (2002). 6) 馬場美也子,北岡広宣,棚橋 巌:GA を用い た経路最適化による広域交通シミュレータ上での 交通状況再現手法,情報処理学会論文誌,Vol.43, No.12 (2002). 7) 木俣 昇,高木秀彰,黒川浩嗣:ペトリネット による交通流シミュレーションの開発,土木計画 学・講演集,No.17, pp.177–180 (1995). 8) 高橋伸夫,久保田尚,坂本邦宏,杉浦考臣:ミ クロな交通状況を考慮した交差点シミュレーショ ンシステムの開発,第 15 回交通工学研究発表会 論文報告集,pp.49–52 (1995). 9) 加藤恭義:セルオートマトン法による道路交通 シミュレーション,日本人工知能学会誌,Vol.10, pp.242–250 (2000). 10) 玉城龍洋,安江里佳,北 英輔:確率速度モデ ルと CA 法による交通シミュレーション,情報処 理学会論文誌,Vol.45, No.3, pp.858–869 (2004). 11) 猪飼國夫,本多中二,板倉直明ほか:ファジィ化 微視的モデルによる渋滞解析を目的とした道路交 通シミュレータ,シミュレーション,Vol.16, No.3, pp.199–208 (1997). 12) 猪飼國夫,本多中二:ファジィモデルに基づく市 街地での渋滞予測用微視的道路交通シミュレータ, 日本ファジィ学会誌,Vol.11, No.2, pp.215–221 (1998). 13) 池上慶一朗,斎藤 威,花堂紘之:街路交通 シ ミュレ ー ション・モ デル(MICSTRAN-I と MACSTRAN-I),科学警察研究所報告交通編, Vol.16, No.1, pp.1–16 (1975).. 55. 14) 猪飼國夫,本多中二,板倉直明:道路交通シミュ レータのためのファジィ推論による自動車の運転モ デル,日本ファジィ学会誌,Vol.12, No.3, pp.425– 435 (2000). 15) 猪飼國夫,石川 亮,本多中二,板倉直明:ファ ジィ推論を用いたネットワーク構造モデルによる 自動車すり抜け運転動作などのシミュレーション と渋滞解析,情報処理学会論文誌:数理モデル化 と応用,Vol.42, No.SIG14, pp.90–97 (2001). 16) 石川 亮,風間 洋,本多中二,板倉直明,猪飼 國夫:交差点走行車両の運転動作モデル化と交通 解析,情報処理学会論文誌:数理モデル化と応用, Vol.44, No.SIG14, pp.71–80 (2003). 17) Webster, F.V.: Traffic Signal Settings, Road Research Technical Paper, No.39, London, HMSO (1958). (平成 16 年 11 月 24 日受付) (平成 17 年 3 月 14 日再受付) (平成 17 年 3 月 23 日採録) 石川. 亮 1977 年生.2002 年電気通信大学 大学院電気通信学研究科博士前期課 程修了.現在同研究科博士後期課程 在籍中.日本シミュレーション学会, 日本知能情報ファジィ学会各会員. 本多 中二. 1946 年生.1972 年電気通信大学 大学院電波通信学専攻修士課程修了. 同年同大学電波通信学科助手.1982 年工学博士.1985 年同大学電子情 報学科助教授.現在,同システム工 学科教授.日本知能情報ファジィ学会,計測自動制御 学会,IEEE 各会員. 風間. 洋 1951 年生.1973 年法政大学工学 部電気工学科卒業.同年(株)京三 製作所入社.交通システム技術部に て現在まで道路交通制御アルゴリズ ム開発に従事.交通工学研究会会員..
(11)
図


+3

関連したドキュメント
mathematical modelling, viscous flow, Czochralski method, single crystal growth, weak solution, operator equation, existence theorem, weighted So- bolev spaces, Rothe method..
In order to improve the coordination of signal setting with traffic assignment, this paper created a traffic control algorithm considering traffic assignment; meanwhile, the link
This paper investigates how the introduction of user fees and defensive expenditures changes the complex dynamics of a discrete-time model, which represents the interaction
i We present the histogram of the maxima of bounded traffic rate on an interval-by- interval basis as a traffic feature for exhibiting abnormal variation of traffic under DDOS flood
By employing the theory of topological degree, M -matrix and Lypunov functional, We have obtained some sufficient con- ditions ensuring the existence, uniqueness and global
In view of Theorems 2 and 3, we need to find some explicit existence criteria for eventually positive and/or bounded solutions of recurrence re- lations of form (2) so that
Based on this, we propose our opinion like this; using Dt to represent the small scaling of traffic on a point-by-point basis and EHt to characterize the large scaling of traffic in
The benefits of nonlinear multigrid used in combination with the new accelerator are illustrated by difficult nonlinear elliptic scalar problems, such as the Bratu problem, and
