IEEE TRANSACTIONS ON COMPUTERS, VOL. C-27, NO. 3, MARCH 1978
computer systemarchitecture andtheprogramming language requirementsimpose a wide range of auxiliary operations, not closely relatedtothealgorithm but necessary for its implemen- tation.Evenifit isimpossibleto eliminateTa (or equivalently toobtain Q=1),agoodknowledge of the machine structure leads to anincreaseofQ byaclever choice of the auxiliary instructions. This qualityfactor may turn very useful in the evaluation of the efficiencyofprograms implementing image processing algorithms where thecomputing time generally grows quadratically with basen (CTan2).
ACKNOWLEDGMENT
WewishtothankM.Valenziforhishelp in running the pro- grams onthe HP2116Bsystem.
REFERENCES
[1] D. E. Knuth,The Art of Computer Programming, vol. 1. New York: Addi- son-Wesley, 1973.
[2] L.Hellerman, "A measure of computational work," IEEE Trans. Comput., vol.C-21,pp.439-446, May 1972.
[3] S.Warshall, "On computational cost," Annual Review in Automatic Pro- gramming, vol 5. New York: Pergamon Press, pp. 309-330, 1969. [4] A. Rosenfeld,"Connectivity in digital picture," J. Assoc. Comput. Mach., vol.
17, pp.146-160,1973.
[5] ,DigitalPictureProcessing. New York: Academic Press, 1976. [6] "Arcsandcurvesindigitalpictures," J. Assoc.Comput. Mach.,vol. 20,
pp.81-87, 1973.
[7] A. Rosenfeldand J. L. Pfaltz, "Sequential operationindigitalpicture pro- cessing," J. Assoc.Comput. Mach.,vol. 13, pp.471-494,1966.
[8] S.Levialdi,"Onshrinking binarypatterns," Commun. Assoc.Comput. Mach., vol. 15, pp. 7-10, Jan.1972.
[9] L.Cordela, M. J. B. Duff, and S. Levialdi,"Comparingsequential and parallel processing ofpicture," in 3rd Int. JointConf.PatternRecognition, Coronado, CA,pp.703-707, Nov.1976.
1101 V.Franchina, A.Pirri, and S.Levialdi,"VIP: Animage acquisition device for digital processing,"inProc.Conf.AssistedScanning, Padova,pp.300-321, Apr. 1976.
[11] "Aguide to HPcomputers,"Hewlett-PackardCompany, CA,1972.
ConnectionAssignmentsforProbabilistically Diagnosable Systems
HIDEO FUJIWARAANDKOZOKINOSHITA Abstract-This correspondence is concerned with probabilistic faultdiagnosisfordigitalsystems. Agraph-theoreticmodel of a diagnosablesystem introducedby PreparataetaL[3]isconsidered inwhich a system is made up of a number of units with the proba- bilityoffailure. The necessary and sufficientconditionsareob- tained for the existence oftesting links (a connection) to form probabilistically t-diagnosablesystems with and withoutrepair. Methods for connection assignmentsaregiven for probabilistic faultdiagnosis procedureswith and withoutrepair.Maheshwari andHakimi[10]gavethenecessary and sufficient condition for a systemtobeprobabilistically t-diagnosableWithoutrepair.Inthis correspondence,weshowthe necessary andsufficientcondition for a systemtobeprobabilisticallyt-diagnosable with repair.
Manuscript received July 8, 1976; revised November 17, 1976.
The authors are with the Department ofElectronicEngineering, Osaka Uni- versity,Osaka, Japan.
Index Terms-Automatic diagnosis, connection assignments, digital systems, graphs, probabilistic fault diagnosis, self-diag- nosablesystems,testinglinks.
I. INTRODUCTION
Studies inself-diagnosablesystems haveappearedin the lit- erature [1]-[10]. Preparataetal. [3] first introduceda graph- theoretic model ofdigitalsystemsfor thepurposeof diagnosis ofmultiple faults,andpresented methodsofoptimalconnection assignmentsforinstantaneous andsequentialdiagnosis proce- dure. Maheshwari and Hakimi [10] introducedadiagnosability measure tbasedontheprobability ofoccurrenceof faults and presentednecessaryand sufficient conditions forasystem tobe probabilistically t-diagnosableinthegraph-theoretic model.
Thediagnostic model employedinthiscorrespondenceis the model introduced by Maheshwari and Hakimi[10],and it isas- sumed that the reader is familiar with the model, assumptions, definitions, and notations given there. Theconceptof probabi- listicdiagnosability (without repair)wasdefined in[10].Prob- abilisticdiagnosability with repaircanbe defined similarly.
Definition 1
[10]:
A systemS,representedbyadigraph G = (V,E), is saidtobeprobabilistically t-diagnosable without repair (p-t-diagnosable without repair) if foranyweighted digraph G5, representing S andsome setoftestoutcomes,there existsatmost oneconsistent faultsetFc V such thatP(F)> t.Definition2: AsystemS,represented byadigraph G,is said tobeprobabilistically t-diagnosable with repair (p-t-diagnosable withrepair)ifforanyweighted digraphG5, representingS and some setoftestoutcomes, there existnoconsistent faultsets
Fj,F2,
--*,F1 such thatn Fi=
i=l
andP(Fi)
> tfori= 1,2,* ,l.In ap-t-diagnosablesystemwithrepair,the intersection of all consistent faultsets,whoseapriori probability ofoccurrenceis greaterthant,isnot empty sothatatleast the unitsbelonging tothe intersectionareallfaulty. Hence,there existsasequence ofapplicationsoftestsandrepairsof identified faults that allows all faultsoriginallypresenttobe identified.
II. FUNDAMENTAL THEOREMSFORCONNECTION
ASSIGMNENTS
GivenasystemS withunits
ub,u2,
* ,Unand the probabilityp(Ui)
ofui
being faultyforalluiE V=1ui,U2,
.*..*,Unl, thenwe consider theproblemsoffindingaconnection of S such that S isp-t-diagnosablewith and withoutrepair.Wecan statethefollowingfundamental lemmas.
Lemma1: IfasystemS,representedbydigraphG= (V,E), isp-t-diagnosable withrepair,then thereexists no 2-partition
IU1,U21
of V suchthatW(U1)
<K(t)
andW(U2)
<K(t).
Proof: Supposeforsome2-partitionIUl,U2}
of V, W(U1)<K(t) and W(U2)<K(t). Wecaneasilyfindaweighteddigraph GC of S that has U1 and U2asconsistentfaultsets. Thus,by Definition2,S wouldnotbep-t-diagnosablewith repair.
Q.E.D. Lemma2:Let Vbea setofunits ofasystemS.Ifthereexists no2-partition
MU1,U21
ofVsuchthatW(U1)<K(t) andW(U2)<K(t),thenthere existsadigraph G=(V,E)such thata system representedbyGisp-t-diagnosablewithout repair.
Proof:Considera completedigraph G = (VE) such that
(ui,uj)
E E forallui,uj
E V. We shallprovethatasystemS representedbyG isp-t-diagnosablewithout repair.The proof is by contradiction. Assume the existence ofa
0018-9340/78/0300-0280$00.75 ©1978 IEEE
280
CORRESPONDENCE
weighteddigraph
G,
forwhich therearetwoconsistent faultsets F1and F2 with W(F1), W(F2)<K(t). Let X= V- (F1 UF2), Y=F1 nF2,Z =F1
-Y, and Z2=F2- Y.Without loss of gen-
erality,wehave Zi sg*
If X = X,then
{F2,Z11
is a2-partition ofV suchthatW(F2) < K(t) and W(Z1) <K(t). Byhypothesis,there exists no 2-parti- tionfU1,U21
ofV suchthatW(U1) <K(t)and W(U2) <K(t). Thisis acontradiction. Therefore,wehaveX s 0.BecauseGiscomplete,there exists an arc
(ui,uj)
E E suchthat ui E Xanduj
E Z1.Sinceui,uj
E F2and F2 isaconsistentfault set, wehaves(ui,uj)
= 0.But sinceF1 is alsoaconsistent fault setandui E F1, uj E F1,wehaves(ui,uj)
=1.This isa contra- diction.Hence,ourinitialassumptionwaswrong. Q.E.D. Givena systemS with unlts u1,u2,...,un
and the weightW(ui)
foreachui
E V =Iu1,u2, .,Un.
, thenwe have thefollowing theorems.Theorem 1:Given a system S with a set of units V and the weight
W(ui)
forallui E V, then there existsadigraphG= (V,E) such that Srepresented by G isp-t-diagnosablewithout repair ifand onlyifthere existsno.2-partitionIU1,U21
ofVsuch that W(U1)<K(t)andW(U2) <K(t).Proof-Necessity:It isobviousthatevery systemthatisp- t-diagnosablewithoutrepair is alsop-t-diagnosablewithrepair. Hence, the necessityofthe theoremfollows from Lemma1.
Sufficiency:FollowsfromLemma2. Q.E.D. Itcanbe easilyverified that Theorem1isvalidforp-t-diag- nosability with repair also.
Example:Considerasystemconsisting of three units such that
p(Ul)
= Y5,p(U2)
=¼, p(U3)
= i,and t =Y20.
Thenwehave W(u1) = log4, W(u2) =log3,W(U3) =log2,andK(t) =log8. Let U1 =luil
and U2= 1u2,u31, thenwehaveW(U1) =log4 > K(t) andW(U2) =log6 >K(t). Thus, from Theorems1and2, it canbeseenthatthere existsnodigraphGsuch that thesystem represented byG isp-t-diagnosablewithrepairorwithoutre- pair.IlL CONNECTIONASSIGNMENTSFORDIAGNOSABILITY Ithas been showninthelastsectionthatfora systemSwhich isp-t-diagnosable,thesetof units Vmustsatisfy the condition ofTheorem 1,i.e., there existsno2-partition
MUP,U21
of Vsuch thatW(U1) <K(t)and W(U2) <K(t). Inthis sectionwe con- sider thedesignofp-t-diagnosable systemsprovided that the above condition holds.GivenasystemS witha setof units Vandweight
W(ui)
for all ui EV,
asubset U of Vsatisfyingthefollowing conditionis calleda basesetof S.Condition:There existsno2-partition
IU1,
U2} of U such that W(U1)<K(t)andW(U2)<K(t).Definition 3: A system S with digraph G = (V,E) issaidto belongtoadesign
Do
ifforsome basesetUofS,1) (U) isacomplete digraph,
and2) r-l(ui) c
U andW(F-l(ui))
>K(t)
for allui e V- U.Definition 4: A system S with digraph G = (V,E) issaid to belongto adesignD1ifforsomebasesetU of S,
1)
(ui,ui+1)
eEfor1 <i< n -1, 2)(un,ul)
E E,and3)
(ui,us)
E E for 1 <i <s- 1,where U=
(ul,u2,
.-- ,u,}and V=Wu1,u2,
Un.Toillustrate thedesigns
Do
andD1,weconsiderasystemS,
which consists offive units U1,U2, ...,U5. Suppose p(u1) = ,p(U2) =
'/6p(u3)
=/5,p(U4)
= g,p(u5) =1/s,andt
=%As,
then wehaveW(ul)
=log6, W(u2) =log5, W(U3) =log4,W(u4) = log3, W(U5)= log2,andK(t)=-log%A5
+ log%
+ log%
+ log%
+log4+log%=log10.Let U=Wub,u2,u3A.
Since W(U)=log120> 2K(t),there existsno2-partition
IU1,U2j
of U such thatW(U1)
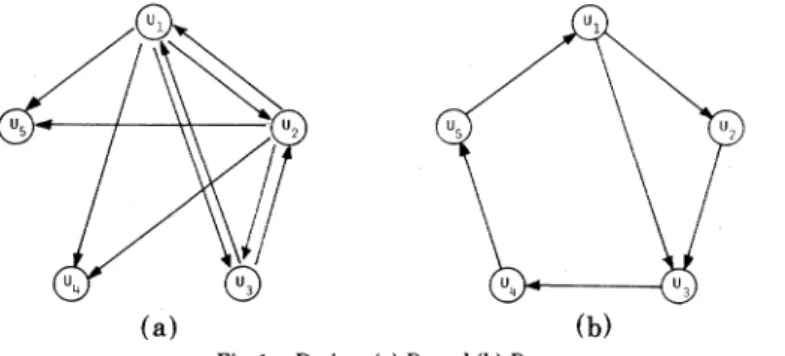
<K(t)and W(U2) <K(t). Therefore Uis abaseset of Si.In Fig. 1 twodesignsareillustratedfor systemS1.
Do
isshown inFig.1(a) andD1 isshowninFig.1(b).InFig.1(a), (U) is a complete digraph, r-1(u4) =r-'(u5)
=fu1,u21
= U, and W(1-1(u4)) =W(r-l(u5))
= log30 >K(t). Therefore,system Sirepresented byadigraph showninFig.1(a) belongstodesign Do. Itcaneasily be shown thatsystemSi representedbyadi- graph showninFig.l(b) belongstodesignD1.Weshallprovethat a system isp-t-diagnosable without repair ifitemploysdesignDoand thata systemisp-t-diagnosablewith repairifitemploys design D1.
Theorem2: If a systemS employs design
Do,
then S isp-t- diagnosable without repair.Proof: The proofisby contradiction. Assume the existence ofaweighted digraphGC for which thereare twoconsistent fault sets F1andF2 withW(F1), W(F2) <K(t).LetX= U- (F1 U
F2), Y=F1 n F2, z
=F1
-Y,
andZ2
=F2-Y,
where U is a basesetof SindesignDo.
Without loss ofgenerality,assumeZ#
0.
Thefollowingcases arepossible.Casel:Z
nl
U# Oand F2 U5qk.
IfX = X,then Z1 n U,F2n Ul
isa2-partition of U such thatw(z nl u)
<W(Z1)
<W(F1)
<K(t) andW(F2
n u)
< W(F2) <K(t).Thiscontradictsthe hypothesis that U isabasesetof S.There- fore,wehaveX -q0.Because (U) iscomplete,there existsan arc
(ui,uj)
E Esuch thatui E Xanduj E Zi. Sinceui,uj
E F2 and F2 isaconsistentfaultset, wehaves(ui,uj)
=0.ButsinceF,
is alsoaconsistentfaultsetand ui& F1,uj
EF1,wehaves(ui,uj)
= 1.Thisis acontradiction.
Case 2:Z1n U= b, i.e., Z1 = V- U.Let uje Z1.If
r-1(uj)
CF2, thenwehaveW(r-'(uj))
<W(F2)
<K(t), but thiscon- tradictsthehypothesisthat SbelongstodesignDo.
Therefore, there existsui& F2 nr-'(uj).
Sincer-'(uj)
CU,wehaveui
eZiandthusui&F1
P
F2.Sinceui,uj
E F2andF2 isaconsistent faultset, wehaves(ui,uj)
=0.But since F1 is alsoaconsistent faultsetandui E F1, uj E F1, wehaves(ui,u1)
= 1.This isa contradiction.Case3:F2 n U =
4,
i.e., F2 a V - U. Letuj
E Z1. Sincer-P(uj)
a U, wehaver-F(uj)
n F2= 0. IfF-1(uj)
cZ1, then we haveW(-l(uj))
<W(Z1)
<W(F1)
<K(t),
but this contra- dicts the hypothesis. Thereforer-l(u)n#,
40.
Hence, there existsui E r-F(uj) n F1 n F2.
Sinceui,uj
&F2
andF2
is a consistent faultset, wehaves(ui,uj)
=0.But since F1 is alsoa consistent faultsetandui e F1, uj & F1, wehaves(ui,uj)
= 1. This isacontradiction. Hence,ourinitial assumptionwaswrong. Q.E.D. Theorem3:Ifa systemS employs designD1,then S isp-t- diagnosablewith repair.Proof: The proof is by contradiction. Assume the existence of aweighted digraph
GC
forwhich thereareconsistent faultsetsFj,F2,
--*,F1suchthatn~Fi =
i=1
and
W(F1)
<K(t) forallFi
EIF1,F2,
- -,F1J.
Let U=IU1,U2,
...
,usj
beabaseset of S indesignD1and let V=$u1,u2, *n*. ,unj.
Thefollowingcases arepossible.
Case1:us E
Fi
for allFi EjF1,F2,
- -*,F1j.
In theweighted digraphGC,
there existsa vertexUksuch thats(ui-1,ui)
=0 for all i =s + 1,s +2, * *.,k - 1,s(Uks1,Uk)
= 1,anduk E Fk for someFk E1F1,F2,
* ,F1l. Then,wehaveUs+l,Us+2,
"',Uk-1
&Fi
for allFi
EfF1,F2,
..*,F1I}.
IfUk E
Fj
forsomeFj,
thenwehaveUk1
F1nP
FkandUk E F1 QFk.
SinceUk6_,Uk E FJandFJ isaconsistent faultset, wehaveS(Uk-1,Uk)= 0.But since Fk is alsoaconsistentfaultset andUk-1
EFk,Uk
EFk,
wehaveS(Uk-1,Uk)
=1.
Thisis a con-281
IEEE TRANSACTIONS ON COMPUTERS, VOL. C-27, NO. 3, MARCH 1978
(a)
Fig.1. Designs(a)Doand (b) D1.tradiction. Therefore,
uk
&Fj
forall F1. However, this contradicts thatfl Fi =4).
i=1
Case2:us E
Fj
for someFj
E fF1,F2,*,Ft1.
IfF1 n u =u , thenFJ
- Uand thusW(F1)2 W(U). SinceW(Fj)
<K(t),we have W(U) <K(t). But t-his contradicts that U isabaseset. ThereforeF1 n U # 4.Since
r Fi= 4),
i=l
wehaveus EFkforsomeFkE
IF1,F2,
-*,FI.
Now,weshall show thatF1n UaFk. Assume that there existsa vertexu,a Fj
n Fk Uu.Since Fkis aconsistentfaultsetandua,us
EFk,wehaves(ua,us) =0. But since
Fj
isalsoa consistent fault setanduta
EFj,
us EFj,
we haves(ua,us)
= 1. This is a contradiction. Therefore,wehaveFj
n u _Fk.Let U1=
Fj
n U and U2=F1 nu.Clearly, U1#4),
U2#4),Ul
U U2=UandUlnU2
=4.Since UlaFj
and U2cFk,we have W(U1) <W(F1)
<K(t) and W(U2) < W(Fk) <K(t). Hence, thereexists a2-partitionIU1,U2j
ofUsuch thatW(U1)<K(t)andW(U2)<K(t).Thiscontradictsthat U isabaseset. Q.E.D. Theorems2and3showthatif one canfindabasesetUofa system,thenone caneasilyconstructp-t-diagnosablesystems withand without repair usingdesignsD1 and
Do,
respectively. Hence,weshall showamethod forfindingabasesetofagiven system.GivenasystemS witha setofunits V=
IUL,u2,
* **,un I
and weightW(ui)
forallui E V, then without loss ofgeneralityas- sumeW(uj)
2 W(U2) 2...>W(Un).
IfthesystemS satisfies thenecessaryand sufficient conditionofTheorem 1,wecanfind abasesetU ofSasfollows.1) If.W(V) >2K(t),then let U=
Iu1,u2,
**,u,j
such thats-1L W(uj) < 2K(t) and il1
ZS W(uj) >2K(t).
i=l1
2) IfW(V) <2K(t), then let U= V.
Example: Considerthesystem
S,
withW(u1)=log6, W(u2)=log5, W(U3)=log 4,W(U4)=log3,W(U5)=log2, andK(t)= log 10.
W(V) = E5
W(uj)
=log720>2K(t) =log100. i=1W(uD)
+ W(u2)=log30< 2K(t) andW(ul)
+ W(U2)+W(U3)=log120 >2K(t).Hence,wehave U=
1u1,u2,u3j,
which isabasesetof
Sl.
IV. NECESSARYANDSUFFICIENTCONDITIONFOR DIAGNOSABILITY
Sofar wehavediscussed connection assignmentproblemfor probabilisticallydiagnosablesystems. Inthissectionwepresent thenecessaryand sufficient condition forasystemrepresented byadigraphtobeprobabilistically diagnosable.Maheshwari and Hakimi [10] gave the necessaryand sufficient condition for a system tobep-t-diagnosablewithoutrepair.Wecan statethe necessaryandsufficient conditionforasystem tobep-t-diag- nosable with repairinthefollowing.
Theorem4: AsystemS withdigraph G= (V,E)isp-t-diag- nosable with repairifand onlyiffor allU = Vwithr-F(U)=0, whenever there exist subsetsofU,F1,F2,--,F- suchthatU =
1Fi
= u,
nQ=1Fi
=4 andW(Fi)
<K(t)forallFi &IF1,F2,
...,Fill
thenr-1(Fa n
Fn
)Fn
nF)P
0 forsomeFa,F,
e F1,F2,* **,FI3-
Proof-Necessity: Suppose the condition of the theorem does nothold. Then, forsome Ua Vwith r-(U) =
4,
there exist subsets of U,F1,F2,* * ,F1 such thatU .1F1 = U, n 1Fi = 4),W(Fi)
<K(t)forallFi,
andr-'(Fa
nF3)
nFan,Fo
= 0 for allFa,F3
E tF1,F2,*--,FI.Constructaweighted digraph
G,
asfollows. For eacharc(ui,uj)
E E,- , ifui&
Fk,uj
EFk
forsomeFk s ui,,UJ -10,
otherwise.ForanyFiE
$F1,F2,
-* ,FA3,weshallshow thatFiis aconsis- tentfaultsetforthe aboveweighted digraphG,.
1) Forany arc
(ui,uj)
EEsuch thatui &Fi, uj
EFi,
wehave s(ui,uj)
=1bythedefinition ofG,.
2) Forany arc
(ui,uj)
E Esuchthatui,uj
&Fi,
we canshow thats(ui,uj)
=0 asfollows.Supposethats(ui,uj)
=1,then from the definition ofG8,
ui EFk,uj
EFk forsomeFk. Thisimplies ui E r-l(Fk nFi) nl
Fk nFi.
But,thiscontradicts thehy- pothesis.Therefores(ui,uj)
=0.Hence, F1,F2,-
--,Fl
are all consistent fault sets forG,
Moreover,nl=1Fi
=4, W(Fi)
<K(t)for allFi.
Therefore,the systemisnotp-t-diagnosablewithrepair.Sufficiency:
Theproof
isby
contradiction. Assume the ex- istence ofaweighted digraphG,
forwhich thereareconsistent faultsetsF1,F2,--,F- suchthat n=,F1
=4 andW(Fi)
<K(t) forallFi.
Let U= U
LLFi.
IfF-'(U) #4,
then there existsanarc(ui,uj)
& Ewithui E Uand
uj
E U. Moreover,sincen(=1F1
=4,
we haveuj
EFj
nFk forsomeFj,Fk.
Sinceui,uj
EFk
and Fkisa consistentfaultset, wehaves(ui,u1)
=0. But sinceFj
isalsoa consistent faultsetandui E F1, uj EFj,
wehaves(ui,u1)
= 1. This isacontradiction. Therefore,wehaveP-1(U)
=4.Thus, by hypothesis,
F-1(Fa
nFP)
nFa
nFP
$ 4) forsomeFa,Fgj,
i.e.,there existsan arc(ui,uj)
EEwithui EF.
nFP,
andUj
EFa nFP.
Sinceui EFa, u;j Fa, andFaisaconsistent fault set, wehaves(ui,uj)
= 1.Butsince F, is alsoaconsistent fault282
CORRESPONDENCE
set andui,uj E F,wehave
s(ui,uj.)
= 0.This isacontradiction. Hence, our initialassumptionwaswrong. Q.E.D.V. CONCLUSIONS
In this correspondencewehavepresented thenecessaryand sufficient conditions for the existence ofaconnectiontoform probabilisticallyt-diagnosablesystemswithand withoutrepair, and also presented thedesignsD1 and Do forp-t-diagnosable systems withandwithout repair, respectively. However,these designs arenotoptimal,andhencetheinvestigation of optimal connection assignmentsforprobabilisticallydiagnosablesystems
withand withoutrepair isanopenresearchproblem. ACKNOWLEDGMENT
The authors wishto acknowledge the support andencour- agement ofProf. H.OzakiofOsaka University, Osaka, Japan.
REFERENCES
[1] R. E. Forbes,D. H.Rutherford,C.B.Stieglitz,and L. H. Tung, "A self-diag- nosable computer,"in1965Fall Joint Comput. Conf.,AFIPSConf.Proc.,vol.
27, Washington,DC:Spartan,1965,pp.1073-1086.
[2] E. Manning,"Oncomputerselfdiagnosis-PartI: Experimental study ofa
processor-PartII: Generalizations and design principle," IEEE Trans.
Electron.Comput.,vol. EC-15,pp.873-881,882-890,Dec.1966.
[3] F. P. Preparata,G. Metze, and R. T.Chien, "On the connectionassignment problem of diagnosablesystems,"IEEE Trans. Electron.Comput.,vol. EC-16, pp.848-854,Dec.1967.
[4] C. V. Ramamoorthyand W. Mayeda, "Computer diagnosis using the blocking gate approach," IEEE Trans. Comput., vol. C-20, pp. 1294-1299, Nov. 1971.
[5] N. Seshagiri,"Completely self-diagnosable digitalsystems,"Int.J.Syst.,vol. 1,pp.235-246,Jan. 1971.
[6]S. L. HakimiandA. T. Amin, "Characterization of connection assignment of diagnosable systems,"IEEE Trans. Comput.(Corresp.), vol. C-23,pp.86-88, Jan.1974.
[7] A. D. Friedman,"Anewmeasureofdigitalsystemdiagnosis," in Proc. Fault TolerantComputing Conf.,pp.167-170,June1975.
[8] J. D. Russelland C. R. Kime," System fault diagnosis: Closure and diagnosa- bilitywith repair,"IEEE Trans. Comput., vol.C-24,pp.1078-1089, Nov. 1975.
[9] J. D. RussellandC. R. Kime, "System fault diagnosis:Masking,exposure,and diagnosabilitywithoutrepair,"IEEE Trans. Comput.,vol.C-24,pp.1155-
1161,Dec.1975.
[10]S. N. Maheshwariand S.L.Hakimi, "On modelsfordiagnosablesystemsand probabilisticfaultdiagnosis,"IEEE Trans.Comput.,vol. C-25,pp.228-236,
Mar.1976.
Semi-FastFourier TransformsoverGF(2m). DILIP V. SARWATE
Abstract-Analgorithm whichcomputesthe Fourier transform of a sequenceof lengthn overGF(2m) using approximately2nm
multiplicationsandn2+nmadditions is developed. The number of multiplicationsisthus considerably smaller than then2multi- plications requiredforadirect evaluation, though thenumberof
ManuscriptreceivedJune28, 1976;revised April27, 1977.This workwas sup-
ported inpartbythe Joint Services Electronics Program (U.S. Army,U.S.Navy,
and U.S.AirForce) underContractDAAB-07-72-C-0259.
The authoris withtheCoordinated ScienceLaboratoryandthe Department of
ElectricalEngineerig,University of IllinoisatUrbana-Champaign, Urbana, IL 61801.
additions is slightly larger. Unlike the fast Fouriertransform,this method does not depend on the factors of n and can be used when n is not highly composite or is a prime.
Index Terms-Analysis of algorithms, computationalcomplexity,
error-correcting codes, finite fields, Fouriertransforms.
I. INTRODUCTION
The discrete Fourier transform (DFT) of asequence ofnele- ments of a finite field can be computed by means ofthe fast Fourier transform (FFT) algorithm over the finitefield [1].This algorithm is just the well-known complexfield FFTalgorithm (e.g.,
[2])
with the primitive nth root of unity exp(j27r/n)
in the -complexfield being replaced by a primitive nth rootofunityin the finite field. When n is composite, with factorsnl,n2 * * ,n, the finite field FFT is essentially what iscalled a mixed-radix FFTand requiresn(ni+n2 +* + n8) multiplications andn(n1
+ n2+* +n,)
additions as compared to then2 multiplications andn2 additions required to evaluate the DFTinthe most ob- vious way. If n is not highly composite, (or if n is aprime), the saving in computation is quite small (ornonexistent). In such cases, the DFT can be computed from the cyclicconvolutionof two appropriately defined sequences of lengthapproximately2n or more [3]-[5]. This convolution itself can be computedby
computing the forward transforms of the twosequences,
apointwise multiplication of the transforms, and an inverse transform. If the length of the sequence is chosen tobe
highly
composite, the FFT algorithm can be used to computethe three transforms and significant savings in computation can be achieved.The problem that arises in using the convolutionmethod is that the
fmite
fieldmay not contain an appropriateprimitiveroot of unity, and computations may have to be done in amuch larger field [6]. In such a case, one can transform theproblemof com- puting a finite field convolution into one ofcomputing aconvo- lution of arrays of integers. If the array convolutioniscomputed by means of a two-dimensional complex fieldFFTalgorithm,
then the DFT over gf)pm) can be computed [6] using0(nm log nmM(q)) bit operations where M(q) is the numberof bit oper- ations required to multiply two q-bit numbers and q 5 2log2n +4log2
m +4log2
p. However, this method is notveryefficient forsmallvalues ofn.The algorithm proposed in this correspondence requires 2(n
- 1)(m - 1) multiplications and (n- 1)(n+ m- 1)additionsin GF(2m) to compute a transform of length n, n a prime, over
GF(2m).
Ifn is not a prime, the number ofmultiplications is somewhat less and the number of additions issomewhatmore. Since multiplications require more time thanadditions, the al- gorithm is somewhat faster than the direct method,thoughboth require0(n2)arithmetic operations. However, theproposed
al- gorithm requires0(n2log n) bit operations only,which is better by a factor of log n over the direct method. For smallvaluesof n, the proposed method is superior to the cyclicconvolution
technique and to the usual FFT algorithm based onthe factors of n. Asymptotically, of course, the cyclic-convolutiontechnique requires 0(nlog4
n) bit operations only, and is vastlysuperior. For these reasons, the proposed algorithm is dubbed asemi-fast
Fourier transform (SFFT) algorithm.II. THE SFFT ALGORITHM
Let n be an odd integer, m the multiplicativeorderof 2mod n, a a primitive nth root of unity in GF(2m), and: an
element
of degree m in GF(2m). It is convenient, but notnecessary, totake fi to be a primitive element. Let A(x) =Ao +Alx
+A2x2* * +-0018-9340/78/0300-0283$00.75 ©1978IEEE
283