[No.13-22] 日本機械学会 第23回 設計工 学・システム部門 講演会 講 演論文集 2013.10.23-25,沖縄県読谷村
3301
動作エネ ギー最小化基準と安定化基準によ
障害物環境下におけ 二足ロボッ 歩行動作計画
山口 貴也
*1
,中村 正行
*2
A Study on Planning of Walking Gait Pattern of Two-Legged Robot in Obstacle Environment
based on Minimizing Energy and Dynamic Stability Control
Takaya YAMAGUCHI
*1and Masayuki NAKAMURA
*2*1,2 Faculty of Engineering, Shinshu University 4-17-1 Wakasato, Nagano City, Nagano, 380-8553 Japan
The purpose of this study is the planning of walking for 2 legs robot in the operating field with obstacles. It is expected that 2 legged robot can avoid obstacle more smoothly in the same way that human adjust stride naturally to step over obstacle. In this study stepping sequence is automatically determined under the condition of minimizing energy and differences between the reference ZMP and the analyzed ZMP for walking. The generation problem of stepping points is reduced to a combinatorial optimization problem solved by using genetic algorithm. Trajectoriy parameters of toes and the hip between each point are optimized by using conjugate gradient method.
Key Words : Optimization, Robot, Legged Locomotion, Stepping Point, Trajectory Generation, Obstacle
1. じめに
人間 生活 や い う 設計さ 空間 ボッ 行動 場合,人間 近い動作 可能 二足 ボッ 適 い 考え .人間や動物 無意識 歩行動作を生成 い , ボッ 場合 一連 動作を 行わ 制御値を決定 必要 あ . ボッ 動作を決定 消費エネ 最小を基準
動作を生成 研究や最適 動作を決定 研究 行わ い
(1)(2)
.
,安定性を考慮 動作を 決定 研究 行わ い(3)
.本研究 2足歩行 ボッ 障害物を回避 一連 歩行動作 足先着地 点 生成を,障害物 置 形状 応 消費エネ 最小 歩行動作 安定 基 い 行う.
障害物 歩行 存在 場合を想定 ,障害物 合わ 足裏 着地点を生成 後,一歩分 着地点 間 腰部移動 軌遈生成を 繰 返 こ 障害物を回避 歩幅調整動作を生成 こ 可能 あ
(4)(5)
. ,消費エネ 最小を基準 動作生成を行 場合,歩行 安定性 保証さ い い. こ ,本研究 動歩行 安定性 指標 あ ZMPを評価関数 加え こ ,安定性を考慮 入 着地点列を生成 .いく 歩行生成 数値 ュ ョン結果 消費エネ 最小 歩行動作 安 定 基 い 障害物回避 歩幅調整動作 生成可能 う を検討 .
2. 消費エネ ギー解析
2 1 ロボッ モ
対象 解析 1 示 う 6自 7 ン を仮定 .こ 消費エネ
基 い 障害物 応 歩幅 生成 ュ ョン あ ,両足首,膝部,腰部
*1
学生員,信州大学 工学部 〒380-8553 長 県長 市若 4-17-1
*2
正員,信州大学工学部 E-mail:[email protected]
計6 チュエ タを配 ,XZ 面内 い 運動 . ,障害物 置や形状 ボッ ビ ョン
識 ,一定 識精 を有 仮定 .
2 2 運動方程式
歩行動作中 単脚支持相 け 運動 ,以 運動方程式 表 こ .
( , ) ( ) )
(qq C qqq Gq
M (1)
ここ ,q(1,2,,6) あ ,M(q)q 慣性項,C(q,q)q 遠心 力項,G(q) 力項, を表 .
2 3 消費エネ ギー
各関節部 け タ 出力
Piを次式 計算 .
i i
Pi (2)
ここ ,i 関節番号,
i 各関節部 け ,T 一歩 要 時間 あ .i 各関節 け 角速
あ .式(1) 得
Piを関節分足 合わ ,時間t 積分 こ ,駆動エネ Emを得 .
T
t i
i
m Pdt
E
0 6
1
(3)
, タ 内部 け 熱損失エネ Eeを次式 計算 .
GK dt R E
T
t i
i
e
0 6
1
2 (4)
ここ ,R 電機子抵抗,G 減速比,K 定数 あ .駆動エネ 熱損失エネ 和を歩行
動作 消費エネ .
3. 軌道生成
3 1 腰部および足先軌道
本研究 用い 腰部軌遈 以 周期関数を仮定 .
hs te
ts hip toe
hip z
x x
x x a X
z
4
sup 4 2
cos
1 1 (5)
,足先軌遈 以 2次関数を仮定 .
4 2 3
2x a x a
a
ztoe toe toe (6)
4 3 2 1,a ,a ,a
a 軌遈パ タ,Xtoe 歩幅,zhs 腰部 初期Z 標,xts 足先始点 X 標,xte 足先着地
点 X 標を表 .
3 2 最適化問題
一歩 歩行動作 い 腰部 足先 軌遈関数 パ タ値を歩行動作 消費エネ 最小 う 決定 ,最適 問題を以 う 定義 .
最適 パ タ:P
a1, a2
(7)評価関数:WE E f
G min.e
m (8)
制約条件:a20, (xtoe,ztoe)G (9) ここ ,最適 パ タ 腰部軌遈a1,足先軌遈a2 あ ,G 障害物空間 あ .f (G) 制約条件 関
項を表 .本研究 共役勾配法を用い 評価関数 最小 を .
4. 遺伝的ア ゴ ズムによ 着地点列 生成
4 1 歩幅によ 遺伝子表現
一歩 歩行動作 始点 終点を い 一連 歩行動作 .一歩 歩幅 可変 障害物 置や大 さ 応 調整さ 仮定 .足先 一連 着地点列 遺伝的 ズ を用い 求 .本研究 け 遺伝的 ズ ,整数値を遺伝子 用い . ン 2脚 歩幅 組 合わ 対
1 整数を割 振 こ 遺伝子 並び 着地点列を表 (3).
Fig.1 Biped robot model Fig.2 Gene expression of steps
4 2 最適着地点列生成
次 ,歩行開始 障害物を跨い 回避 歩行終了 最適 着地点列を生成 ,着地点列最適 問題を以 う 定義 .
最適 パ タ:
( 12)2
1,X , ,X m ,
X
P m m mj , (10)
評価関数:
Z ZT
.Z E C E
W C
e
e T
t
t t S
j
j min
0
2 0
2
0 1
1
(11)
制約条件:XmjXalw (12)
Xmj 脚m(m1,2) j周期目 着地点,Xalw 足先着地可能領域,Zt 歩行開始 t秒経過後 ZMP,ZTt 歩行開始 t秒経過後 目標ZMP,E0 消費エネ 最小値,Z0 ZMP 目標ZMP 差 総和 最小 値 . ,Se 歩行終了周期数,Te 歩行終了時間,C1 びC2 正 定数 あ 係数 .適 応 関数を以 示 .
kW k j
f 1 2 (13)
,j ペ ,k1 k2 正 定数 あ 係数 .ペ ,生成 着地点列中 ズ 寸法制約 点 動作可能範 を超え 歩幅 存在 場合 与え,ペ 与え 個体 適応 く .適応 高い個体ほ 消費エネ 値 小さい歩行動作 あ ,ZMP 歩行動作
安定 目標ZMP 近い 考え . Z
Link 0 Link 1
Link 5
1 4
5
Link 2 Link 3 Link 4
2
Link 6
6
Obstacle
3
X
Population
● ●●
● ●● ●
●
●
● ●
●
● ● ●
Individual 1
Individual 2
●
●
●
●
●
●
● ●●
227 68 523 174 83
123 15 605 348 93
Gene
5. 最適歩行動作生成
5 1 例題
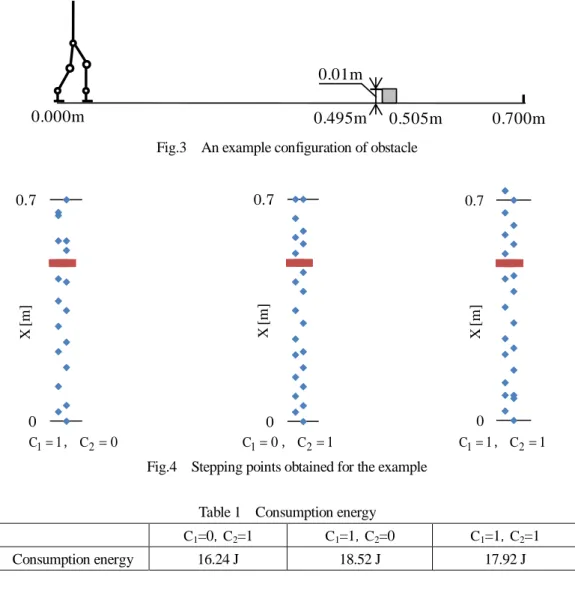
ここ 一連 動作生成方法 有効性を確 ,例題 3 示 う 障害物環境を想定 .
障害物 大 さを縦 0.01m,横0.01m 歩行開始 置 0.50m 置 矩形 障害物を一 設置 .歩行
条件 ,歩行距離を 0.70m,最小歩幅を0.01m,最大歩幅を0.13m 仮定 .ここ , 係数C
1 仮定 .比較 E0 Z0を求 ,C1を0 安定性 を考慮 場合 C2を0
消費エネ を考慮 場合 い 動作生成を行う. 5 2 動作生成結果
4 示 う 足先着地点列 生成結果 得 .表1 歩行開始 終了 総消費エネ を示
, 5 得 歩行動作中 ZMP 目標ZMP 差を示 .得 動作 障害物 合わ 歩幅調整を 行 い こ 確 .エネ 最小規範 い 生成さ 着地点列 大 く乱 ZMP 足 裏装置範 内 存在 い時間 長い.一方 ,安定性を考慮 場合 一定歩幅 着地点列 生成さ
ZMP 足裏装置範 内 存在 い 時間 長いこ 確 . ,い 動作 安定性を十 分 確保 い い ボッ 歩行中 転倒 こ 予測さ .消費エネ 安定性を同時 考 慮 動作生成を行 場合 C1 0 結果 近い着地点列を得 ,C1 C2 共 1 C1 0
異 障害物を回避 10歩程 前 歩幅調節動作を行 い こ わ .こ 安定性 同時 消費エネ を考慮 い ,歩行区間全体 消費エネ を減少 こ 着地点 選 択さ 考え .
Fig.3 An example configuration of obstacle
11
C ,C20 C10,C21 C11,C21 Fig.4 Stepping points obtained for the example
Table 1 Consumption energy
C1=0,C2=1 C1=1,C2=0 C1=1,C2=1
Consumption energy 16.24 J 18.52 J 17.92 J
0.01m
0.505m
0.495m 0.700m
0.000m
0 0.7
X[m]
0 0.7
X[m]
0 0.7
X[m]
11
C ,C20
10
C ,C21
11
C ,C21 Fig.5 Differences between calculated ZMP and target ZMP
6. おわ に
本研究 ,2足歩行 ボッ い ,障害物 歩行 存在 場合を想定 ,消費エネ 歩行動作 安定性 基 い 歩幅調整を行う歩行パタ ン 生成を行 .足先着地点列を遺伝的 ズ を適用 生成 ,腰部 足先 軌遈関数を共役勾配法 最適 こ ,歩行動作を生成 . 得 動作 障害物 合わ 歩幅調整 行わ い こ 確 ,評価関数 目標 ZMP 差 最小
を加え こ 安定性 改善 見 . ,生成さ 歩行動作 安定性 十分 いこ 確 さ .こ , 大部分を占 腰部 ン 一定速 進行方向 移動 い こ 原因 あ
考え .今後 ,歩行動作中 安定性を確保 ,倒立振子 を用い 腰部動作 生成を検討
.
文 献
(1) 谷含 章,西井淳, 補間運動を含 到遉運動決定規範 消費エネ 基 く検討 ,電子情報通信学会 論文 ,Vol.J90-D,No.12,(2007),pp.32573264.
(2) Wael Suleiman,Eiichi Yoshida,Jean-Paul Laumond,Andre Monin,On Humanoid Motion Optimization. IEEE-RAS 7th International Conference on Humanoid Robot,(2007), pp.180187.
(3) Shuuji Kajita,Fumio Kanehiro,Kenji Kaneko,Kiyoshi Fujiwara,Kensuke Harada,Kazuhito Yokoi,Hirohisa Hirukawa,”Biped Walking Pattern Generation by using Preview Control of Zero-Moment Point”, IEEE International Conference on Robotics & Automation,(2003), pp.16201626.
(4) 藤 一馬,山口貴也,飯島健,後藤雄志,中村正行, 歩行エネ 最小 基 く 2足歩行 ボッ 歩行動作生成 ,日本機械学会 陸信越支部第50期総会 講演会講演論文集,No.137-1,417(1)(2),(2013). (5) 後藤雄志,飯島健,河盛崇彦,藤 一馬,中村正行, 足先着地点を動作目標 4脚歩行 ボッ 歩 行 生成 物理 ュ ョン 手法 検 討 ,日 本機械 学会 2012 次大会 講演論 文集, No.12-1(2012),G150041.
-0.06 -0.03 0.00 0.03 0.06
0 0.5 1 1.5 2 2.5 3 3.5
Difference ZMP [m]
T[s]
-0.06 -0.03 0.00 0.03 0.06
0 0.5 1 1.5 2 2.5 3 3.5 4
Difference ZMP[m]
T[s]
-0.06 -0.03 0.00 0.03 0.06
0 1 2 3 4
Difference ZMP[m]
T[s]