中央大学博士論文
可変粘弾性関節を有するマニピュレータの 運動制御
戸森 央貴
博士(工学)
中 央 大 学 大 学 院 理 工 学 研 究 科 精 密 工 学 専 攻
平成
27
年度2016
年3
月博士論文
可変粘弾性関節を有するマニピュレータの 運動制御
中央大学大学院 理工学研究科 精密工学専攻 戸森 央貴
Hiroki TOMORI
目次
1.
序論1
1.1.
研究背景1
1.2.
ソフトロボティクスに関する他研究との比較3
1.3.
研究目的4
1.4.
本論文の構成5
参考文献
6
2.
軸方向繊維強化型人工筋肉9
2.1.
本章の概要9
2.2.
ソフトアクチュエータについて11
2.2.1. McKibben
型人工筋肉11
2.2.2.
軸方向繊維強化型人工筋肉12
2.2.3. McKibben
型人工筋肉と軸方向繊維強化型人工筋肉の比較13
2.3.
軸方向繊維強化型人工筋肉の基礎特性15
2.3.1.
人工筋肉特性試験装置16
2.3.2.
繊維数による特性の違い17
2.3.3.
リング数による特性の違い19
2.4.
人工筋肉の力学的平衡モデルの導出21
2.4.1.
人工筋肉の形状モデル21
2.4.2.
力学的平衡モデルの導出25
2.4.2.1.
長軸方向端部の力学的つりあい25
2.4.2.2.
半径方向の力学的つりあい26
2.5.
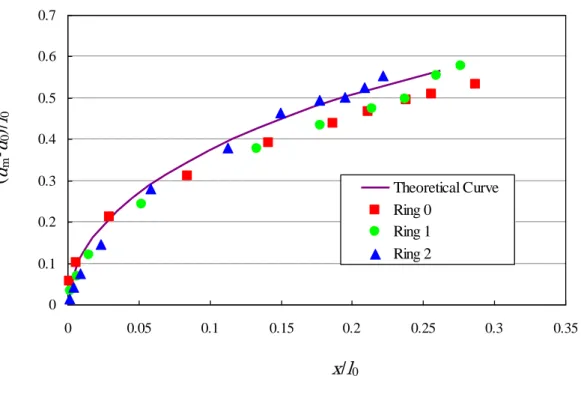
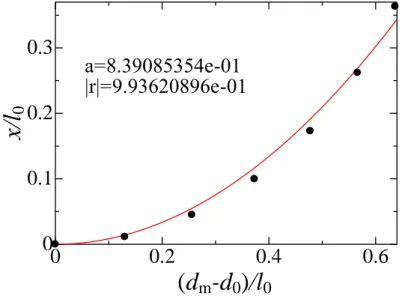
実験によるモデルの検証28
2.5.1. l
0/d
0比の変化28
2.5.2.
負荷の変化29
2.6.
力学的平衡モデルを使用した制御30
2.6.1.
フィードフォワード線形化30
2.6.1.1.
フィードフォワード線形化による収縮量制御30
2.6.1.2.
内部フィードバックの適用31
2.6.2.
内部モデル制御34
2.6.3.
コンプライアンス制御36
2.7.
本章のまとめ38
参考文献
39
3.
磁気粘性流体(MR
)ブレーキ41
3.1.
本章の概要41
3.2.
機能性流体について41
3.2.1.
機能性流体の種類41
3.2.2. MR
流体42
3.2.3. MR
効果の発現機構43
3.3. MR
ブレーキ44
3.3.1. MR
ブレーキの基本構造44
3.3.2.
制御システム46
3.4.
基礎特性47
3.4.1. MR
ブレーキの基礎特性試験装置47
3.4.2.
制動トルク測定実験49
3.5.
本章のまとめ53
参考文献
53
4.
可変粘弾性関節マニピュレータの制御モデル54
4.1.
本章の概要54
4.2.
マニピュレータの制御モデルの構築54
4.2.1.
制御モデルの概要54
4.2.2.
関節部の力学的平衡モデル56
4.2.2.1.
関節剛性条件式56
4.2.2.2.
関節部への力学的平衡モデルの導入58
4.2.3.
人工筋肉の動特性モデル61
4.2.3.1.
電磁弁速度応答62
4.2.3.2.
空気管路での圧力伝播64
4.2.3.3.
人工筋肉内の圧力変化64
4.2.3.4.
人工筋肉の収縮力発生65
4.2.3.5.
人工筋肉の体積変化65
4.2.4.
マニピュレータの負荷系モデル67
4.3.
モデルの妥当性検討実験69
4.3.1.
目標値変更実験69
4.3.2.
負荷変更実験74
4.3.3.
関節剛性変更実験76
4.4.
シミュレーションによるMR
ブレーキの効果検討78
4.4.1. MR
ブレーキ制御78
4.4.2. MR
ブレーキの効果検討シミュレーション79
4.5.
本章のまとめ81
参考文献
81
5. 1
自由度可変粘弾性関節マニピュレータによる位置・振動制御82
5.1.
本章の概要82
5.2.
マニピュレータの構成82
5.3. PI
制御による位置・振動制御84
5.3.1.
制御部の設計84
5.3.1.1. PI
制御による人工筋肉の制御84
5.3.1.1.1.
フィードフォワード制御84
5.3.1.1.2.
フィードバック制御84
5.3.1.2. MR
ブレーキの制御85
5.3.1.2.1. MR
ブレーキによる位置制御85
5.3.1.2.2. MR
ブレーキによる位置保持制御85
5.3.2.
位置・振動制御実験86
5.3.2.1.
位置制御実験86
5.3.2.2.
負荷保持実験86
5.3.3.
実験結果87
5.3.3.1.
位置制御実験結果87
5.3.3.2.
負荷保持実験結果87
5.4.
内部モデル制御(IMC
)による位置制御88
5.4.1. IMC
を利用した位置制御の設計88
5.4.2. IMC
を利用したMR
ブレーキの制御89
5.4.3. IMC
による位置制御実験90
5.5.
本章のまとめ92
参考文献
92
6.
可変粘弾性を利用した瞬発力の発生と粘弾性制御93
6.1.
本章の概要93
6.2.
可変粘弾性関節の有する機能93
6.3.
瞬発力発生手法94
6.3.1.
瞬発力発生手順95
6.3.2.
人工筋肉への初期圧力決定手法96
6.3.3.
瞬発力発生実験97
6.4.
人工筋肉の再拮抗による位置制御100
6.4.1.
空気圧制御のタイミング101
6.4.2.
再拮抗による位置制御実験102
6.5.
瞬発力を伴う運動の粘弾性制御104
6.5.1.
評価関数を利用したMR
ブレーキの粘性制御104
6.5.2.
シミュレーションによる粘性制御系設計105
6.5.3.
評価関数を用いたMR
ブレーキの粘性制御実験106
6.6.
本章のまとめ108
参考文献
108
7. 2
自由度可変粘弾性マニピュレータの簡易モデル構築110
7.1.
本章の概要110
7.2.
関節剛性を用いた瞬発力発生手法111
7.3.
可変粘弾性関節マニピュレータの単関節バネモデル112
7.3.1.
単関節ばねモデル112
7.3.2.
バネモデルの検証実験113
7.3.2.1.
関節剛性制御実験113
7.3.2.2.
動的な応答の検証115
7.4.
マニピュレータの2
自由度化117
7.4.1. 2
自由度可変粘弾性関節マニピュレータのバネモデル118
7.4.2.
実験によるモデルの検証119
7.5. 2
自由度マニピュレータによる投擲運動の検討120
7.5.1.
シミュレーションによる投擲運動の検討120
7.5.2.
シミュレーション結果の再現実験122
7.6.
本章のまとめ123
参考文献
124
8. 2
自由度可変粘弾性マニピュレータによる投擲運動の最適化125
8.1.
本章の概要125
8.2.
実験システム125
8.3. 2
自由度可変粘弾性マニピュレータによる投擲運動126 8.4. 2
自由度可変粘弾性関節マニピュレータのバネモデル127
8.4.1.
剛性変化の近似モデル127
8.4.2.
粘性変化の近似モデル128
8.5. PSO
アルゴリズム129
8.5.1. PSO
アルゴリズムの概要129
8.5.2. PSO
アルゴリズムによる最適化129
8.6. PSO
アルゴリズムによる投擲運動の最適化シミュレーション131
8.6.1.
シミュレーション条件131
8.6.2.
評価関数の設定131
8.6.3.
シミュレーション結果133
8.7.
シミュレーション結果の検証実験135
8.7.1.
実験条件135
8.7.2.
実験結果135
8.8.
本章のまとめ136
参考文献
137
9.
結論と今後の展望138
9.1.
結論138
9.2.
今後の展望140
謝辞
142
研究業績
143
第 1 章 序論
1.1
研究背景マニピュレータはエンドエフェクタを有し,目的の作業を遂行する装置である.その利用分野 は多岐にわたり,工業,福祉,宇宙開発,レスキューの場において人の代替として作業すること が求められている(1)-(3).これは人の負担を軽減するだけでなく,人の代わりに危険な場所で作業 する役割もあり,マニピュレータの需要は今後も増えていくと予想する.
また,マニピュレータに関する研究例も多く,ここ数年での研究例は増加傾向にあり,国内外 に関わらずマニピュレータの研究が活発であることがわかる(4).これは,マニピュレーション研 究がロボット工学の基礎的な課題であり,移動ロボットやヒューマノイドとの親和性も高いこと が要因であると考える.これらの研究にはモータや油圧シリンダをアクチュエータとして用いて いることが大多数であり,マニピュレーション計画や把持計画についての研究が多く存在する
(5),(6).
しかしながら,マニピュレータが多様な領域,特に人間の近くで使用されるようになった現在 では,モータや油圧シリンダのような高剛性アクチュエータだけでは要求に応えられない場面が ある.例えば,介護におけるマニピュレーションは介護対象者の近くでおこなわれ,予測不可能 な人の動きによってロボットとの接触が起こることが予想できる.このとき,バックドライバビ リティの低い高剛性なアクチュエータでは十分な安全性を確保できないと考える.これに対し,
センサによる衝撃力の検出をおこない,衝撃力を低減する手法が提案されている(7),(8)が,センサ によるフィードバックのために応答速度には限界がある.また,人間と協調作業をおこなう場合 には,人間に合わせたインピーダンス調整をすることで協調作業性を向上させることができる.
このとき,モータや油圧シリンダではセンシングと制御ループが必要となり,即応性や操作性の 向上に限界がある.このような理由から,ロボットに構造的かつ可変な柔軟性を持たせることで 衝突安全性や協調作業性を向上させることは非常に有効である(9).
そこで著者らはロボットとしてマニピュレータを選択し,関節の駆動にソフトアクチュエータ を用いることで,前述の課題を達成させる.ソフトアクチュエータは構造的な柔軟性を有してお り,人間親和性の高さが長所である.また,駆動原理,材質,出力の大きさや特性が異なる多種 多様なアクチュエータが存在し,用途に応じて選択されている(10)-(12).ここで著者らは,マニピ ュレータのアクチュエータとして空気圧により駆動するゴム人工筋肉アクチュエータを選択し た.本アクチュエータは主にゴムチューブと繊維で構成され,空気圧を印加した際のチューブの 膨張を繊維によって拘束することで特定の方向に変形を生じさせる.また空気圧の印加によって 変位だけでなく剛性変化を生じる可変剛性アクチュエータでもある (13),(14).本アクチュエータは ソフトアクチュエータの中でも比較的高出力であり,特殊な作動流体を必要とせず,安価に製造
できる.さらに軽量であるため,マニピュレータの多自由度化の際に障害になりにくい.しかし,
高コンプライアンス性を有する空気圧ゴム人工筋肉は振動を生じやすいという課題を抱えてい る.また,空気圧応答の遅れは制御において無視することのできない要素である.そのため,特 に高負荷時の作業で振動が生じたり,瞬間的な出力に限界が存在していた.
そこで,本研究ではゴム人工筋肉アクチュエータを関節駆動の主役とし,制御だけでは解決で きない本人工筋肉の課題を別の要素によって補う.ここで,著者らは
MR(Magneto-Rheological)
流体に着目した.MR 流体は磁場により見かけの粘性を可逆的に変化させる機能性流体であり,空気圧ゴム人工筋肉に比べ十分に高い応答性を有している(15),(16).そのため,前述した空気圧ゴ ム人工筋肉を高ゲインで制御したり外乱を受けたりした際の振動を抑制できると考える.本論文 では本流体を封入した
MR
ブレーキを使用し,空気圧ゴム人工筋肉とともにマニピュレータの 関節部に組み込む.このように本関節ではバネマスダンパを機構として備え,その内バネとダン パを制御できるため,周辺環境に対し安全性を有しながらも協調作業性や応答性の高いロボット の開発に有効であると考える.この特性は生物の筋肉に近く,生体筋も構造的に柔軟であり,そ の粘弾性特性を脳からの信号によって可変に制御している(17).これによって不意の衝突や他者 との協調作業において撃力や位置誤差を吸収することができ,環境や目的に応じた運動が可能で ある.そのため,ロボットにおいても可変粘弾性を与え,制御することで様々なタスクに応じた 運動がおこなえるようになると期待できる.さらに可変粘弾性特性を効果的に使用することで生物が行うようなダイナミックな運動も可 能になると考えている.生物は筋肉や腱に弾性エネルギを蓄積し,運動エネルギとして利用する ことで通常の運動よりも高い出力を得ることができる.加えて,筋肉の可変粘性特性は運動の制 御に寄与している.高コンプライアンス性を有する筋肉が激しい運動をおこなったり撃力を受け たりしながらも,大きな振動を生じずに作業できるのは筋肉の可変粘性によるダンピングのため である.本人工筋肉も同様にエネルギの蓄積が可能であり,
MR
ブレーキによる運動の制御も行 うことができる.一方で高剛性なアクチュエータによって瞬間的な高出力を得ようとした場合,アクチュエータの定格出力を増加させる必要があり,結果としてアクチュエータの重厚長大化に つながってしまう.このようにアクチュエータの構造的な弾性特性を利用し,エネルギの蓄積と 解放をおこなうことで定常出力以上を発揮する手法は本人工筋肉独特の利点である.このような 瞬間的な高出力は瞬発力として人の基本的な運動に不可欠であり,人の代替としてのロボットに も重要な要素であると考える.実際に移動ロボットやマニピュレーションの研究において跳躍運 動や投擲運動が扱われており,移動ロボットでは機動力の向上,マニピュレーションでは遠隔地 への物体搬送が期待されている(18)-(21).そこで,人工筋肉と
MR
ブレーキから成る可変粘弾性関 節の基本的な位置制御に加え,瞬間的な出力の発生と制御を関節の応用として実施する.しかしながら,空気圧ゴム人工筋肉は印加する空気圧と発揮される収縮力,収縮量の間に強い 非線形特性を有しており制御が困難である(22),(23).また,MR ブレーキについては,古荘らがモ ータと
MR
流体デバイスを組み合わせた例(24)があるが,人工筋肉との併用はほとんど例がない.これは,両者の併用には各要素についての知識を要するという困難さによると考える.著者らが
開発する可変粘弾性関節を制御するには,空気圧ゴム人工筋肉と
MR
ブレーキそれぞれの特性 を把握したうえで制御系を構築する必要がある.しかし,本研究を遂行することで可変粘弾性関 節の制御のみならず,関節の特性を利用した運動を提案することで,ロボットの活動領域を広げ たり,パフォーマンスを向上させたりできると考える.これにより前述した人間社会でのロボッ トの発展や各要素の研究分野に対して貢献できると期待する.1.2
ソフトロボティクスに関する他研究との比較人間とロボットの共存を目指すために,ロボットに柔軟性を与える試みは多くなされている.
モータを使った例では,周辺環境や人間との接触に対してインピーダンス制御を用いたり(25), バックドライバビリティを与えたりしている(26).しかし制御によってバックドライバビリティ を高めた場合,制御帯域を超える突発的な接触には対応できず本来の剛性の高さが出てしまう.
また,フェイルセーフの点からも機構的に高剛性なアクチュエータを使用することは不安がある.
これに対し,古荘らはモータと出力リンクの間に
MR
流体によるクラッチ機構を適用した (24). 古荘らはソフトアクチュエータの制御性の低さを理由にモータを使用しているが,著者らは空気 圧ゴム人工筋肉の機構的な安全性を重視し,制御手法を提案することで解決を図る.他にも関節 に線形性のばねを適用する例もあるが(27),関節剛性を可変にするためには複雑な機構を必要と する.一方,空気圧ゴム人工筋肉を用いたマニピュレータとしては
McKibben
型人工筋肉(14)を使用し た研究が主流である.本アクチュエータはゴムチューブの拘束に繊維で編まれたスリーブを用い,径方向に膨張し,軸方向に駆動力として収縮力を発生させる.しかし,スリーブ状の繊維を用い るため径方向の膨張を抑制し軸方向の繊維拘束が不十分であり,結果として空気圧による膨張を 効率よく収縮に変換できない.また本アクチュエータも非線形性を有するため,岡崎ら(28)や則 次ら(29)のようにマニピュレータの制御には位置フィードバックや力フィードバックを用いてお り,人工筋肉の特性を十分に把握した制御系の構築には至っていない.岡崎らは人工筋肉を含め たマニピュレータの逆モデルを求めたが,実測に基づいて構築されたモデルである.これらの課 題に対し,著者らはまず
McKibben
型ではなく軸方向繊維強化型人工筋肉の開発を行った(13),(22). これは繊維拘束を軸方向に限定することで収縮率と収縮力の向上を図ったアクチュエータであ る.さらに人工筋肉の非線形特性を理論的にモデル化し,制御系に組み込むことでマニピュレー タの応答性向上を目指す.これにより人工筋肉の制御を一般化し,マニピュレータに限らず様々 な応用例に適用できると考える.また,著者らはマニピュレータの関節に人工筋肉と
MR
ブレーキを備えることで,人工筋肉 に起因する振動の抑制や位置応答性の向上を目指す.人工筋肉とMR
流体の併用例は少なく,例えば清田ら(30)は人工筋肉によるアーム駆動を
MR
ブレーキで抑えることで人工筋肉の位置応 答の低さを補っている.また,則次ら(31)は人工筋肉の高ゲインによる制御や外乱によって生じ る振動の抑制にER(Electrorheological)ダンパを使用している.ただし,清田らは MR
ブレーキを アームの拘束と開放のために用いており粘性制御として使用しておらず,則次らは人工筋肉の制御に前述同様位置フィードバックを使用している.これらの研究例を踏まえ,著者らは人工筋肉 を理論的にモデル化し制御系に適用すること,
MR
ブレーキを粘性要素として関節に適用し可変 粘弾性関節を開発することを目指す.そして,構築した可変粘弾性関節の応用例として,弾性特性を利用したダイナミックな運動に 注目した.運動としては投擲や跳躍が相当し,研究例としては妹尾ら(19)が投球マニピュレータ を開発しているが,アクチュエータにモータを使用している.他には本堂ら(32)がモータとバネ の直列結合によるシステムを用いて投擲を行っているが,投擲のためにアームを揺動させる必要 がある.また,市川ら(18)はねじりばねの直列構造を用い,ワタリ(21)らは空圧シリンダと磁性ブ レーキを用いた投擲を実現しているが,マニピュレータと異なり投擲運動に特化したデザインと なっている.著者らは開発したマニピュレータ汎用性を維持しつつ,粘弾性特性を制御すること で投擲運動の実現を目指すものとする.
1.3
研究目的前述した研究背景を鑑み,本論文では構造的に柔軟で可変粘弾性を有するマニピュレータの開 発と制御をおこなう.本研究では可変粘弾性の要素として空気圧ゴム人工筋肉と
MR
ブレーキ で構成した関節を開発し,マニピュレータに組み込む.そして,本関節を有するマニピュレータ の基礎的な位置制御をおこなう.ここで,人工筋肉の制御に加えMR
ブレーキを制御すること でマニピュレータの応答性を改善する.さらに本関節の応用的な利用として,弾性特性を利用し たエネルギの蓄積と解放による出力の発生と制御を目指す.そのためには開発した可変粘弾性関節の特性を調査し,制御系を構築する必要がある.そこで,
はじめに本関節の構成要素である空気圧ゴム人工筋肉と
MR
ブレーキについて特性を調査し,数式モデルを導出する.特に人工筋肉は入出力間の非線形性が強いため,これをモデルによって 表す.そして,基礎的な位置制御や剛性制御を行うための制御系を構築する.制御系には先に調 査した空気圧ゴム人工筋肉のモデルを組み込むことで入出力の線形化を図る.さらにマニピュレ ータの動特性モデルを構築し,制御系と組み合わせて制御モデルとする.これにより本マニピュ レータの動特性を理論的に把握し,制御系の検討も可能になる.
次に,実機によるさらに,
MR
ブレーキを併用することでアームの振動抑制と応答性の向上を 目指す.このとき,MR
ブレーキには人工筋肉の目標値追従を阻害しないことが求められるため,両者の特性を考慮に入れた制御系の構築をおこなう.
その後,可変粘弾性関節の応用的な利用として,ダイナミックな運動の実現と制御を目指す.
ここでは人工筋肉の可変弾性特性を利用することでエネルギの蓄積をおこない,これを短時間で 運動エネルギに変換することで高出力を得る.しかし,この目的のために本マニピュレータの汎 用性を損なうことは望ましくないため,著者らは瞬間的な高出力を発生させる専用のシステムを 構築せずに,これまでに開発した可変粘弾性関節による手法を提案する.
最後に,可変粘弾性関節マニピュレータによるダイナミックな運動の応用例として,投擲運動 の制御を目指す.投擲を目標運動とすることで,物体の投擲距離を評価の一つとすることが可能
となり,これはアームの速さだけでなく位置制御も重要な要素となる.そのため,空気圧ゴム人 工筋肉と
MR
ブレーキ双方の制御を要し,可変粘弾性関節の研究課題として適していると考え る.そのために,本マニピュレータを2
自由度化し,手先に把持動作が可能な機構を取り付ける.さらにシミュレーションによる投擲運動の設計をおこない,実機によって検証実験をおこなう.
1.4
本論文の構成次に,本論文の構成について述べる.本論文は全
9
章で構成される.第2
章,第3
章で可変粘 弾性関節の構成要素について基礎特性を明らかにし,第4
章で可変粘弾性関節を有するマニピュ レータの理論モデルを構築する.そして第5
章以降では実機を用いてマニピュレータの制御をお こなう.特に第5
章ではマニピュレータのアームに生じる振動の抑制をおこない,第6
章では可 変粘弾性関節の特性を利用した瞬間的な高出力の発生と制御をおこなう.さらに第6
章の成果を 利用し,第7
章と第8
章では瞬間的な高出力を用いた投擲運動をおこなう.その内,第7
章では 投擲運動を簡易に表すためのモデルの構築,第8
章ではこのモデルを用いた投擲運動の最適化と 実験をおこなう.最後に第9
章で本論文の結論をまとめる.ここで,以下に各章の概要を説明す る.第
2
章では空気圧ゴム人工筋肉の一種である軸方向繊維強化型ゴム人工筋肉に注目し,他のア クチュエータに比べアドバンテージがあることを示す.そして,本人工筋肉の出力特性を実験的 に求める.その後,入力圧力と外力を与えた状態の力学的な平衡関係から,本人工筋肉の力学的 平衡モデルを求める.最後に本モデルを利用した人工筋肉の制御系を提案し,実験によって検討 する.そして,第
3
章ではMR
ブレーキについて扱う.本章ではブレーキに用いるMR
流体の基本 的な特性と,MR
ブレーキの構造について説明する.次に,特性試験装置によってMR
ブレーキ の出力特性を実験的に求め,入出力の関係を式で表す.ここまでの第2
章と第3
章によって,可 変粘弾性関節の制御に必要な各要素の特性を明らかにする.第
4
章では,可変粘弾性関節マニピュレータの基礎的な位置制御や剛性制御を行うための制御 系を構築し,さらに制御手法に対し理論面からの検討をおこなうためのマニピュレータの動特性 モデルを導出する.本モデルでは人工筋肉を拮抗配置した1
自由度関節のマニピュレータをモデ ル化の対象とし,関節周りの力学的平衡モデルを導出する.さらに,空気圧供給システムを含め た人工筋肉の動特性モデルを要素ごとに導出する.そして,MR
ブレーキからのブレーキトルク を含めたマニピュレータの負荷系モデルと組み合わせることで1
自由度マニピュレータの動特 性モデルとする.最後に,MR
ブレーキによる単純な振動抑制手法を提案し,構築した動特性モ デルによって検討を試みる.第
5
章では,第2
章で述べた軸方向繊維強化型ゴム人工筋肉と,第3
章で述べたMR
ブレー キを利用した1
自由度可変粘弾性関節マニピュレータを開発し,位置制御と振動制御をおこなう.本章ではマニピュレータの基礎的な制御として,
PI
制御を人工筋肉制御に採用し,MR
ブレーキ とは独立に制御する.次に,人工筋肉とMR
ブレーキの特性を考慮し,両者を統合する制御手法として内部モデル制御(IMC)を提案する.
第
6
章では,可変粘弾性関節マニピュレータによるダイナミックな運動の発生と制御をおこな う.まずMR
ブレーキと人工筋肉による弾性エネルギの蓄積と解放の機能について説明し,こ れを利用した瞬発力の発生手法を提案し実験する.さらに,本手法を用いた際のアームの位置制 御と剛性制御について提案し,実験とシミュレーションによって有効性を明らかにする.最後にMR
ブレーキによる振動抑制を提案し,先に述べたアームの位置制御,剛性制御と組み合わせる.第
7
章では,第6
章で述べた瞬発力の応用例として投擲動作を取り扱う.ここで,本論ではシ ミュレーションによる投擲運動の最適化をおこなうため,マニピュレータのモデルが必要となる.しかしながら,第
4
章で構築したモデルは計算量が多く,繰り返しシミュレーションするには不 向きである.そこで本章では本マニピュレータを簡易なバネモデルで表し,計算量の少ないモデ ルを構築する.さらに,投擲運動をおこなうため,これまで用いてきたマニピュレータを2
自由 度に拡張し,バネモデルも同様に2
自由度に拡張する.最後に,2
自由度マニピュレータのバネ モデルを利用した投擲運動の検討を試験的に行い,実機によって再現する.そして第
8
章では,第7
章で拡張した2
自由度可変粘弾性関節マニピュレータによる投擲運動 の最適化をおこなう.ここで,投擲運動には第6
章で述べた瞬発力発生手法を利用し,投擲運動 の最適化には第7
章で構築したバネモデルを用いる.そして,まずシミュレーションによる投擲 運動の最適化をおこない,次に実機による検証実験をおこなう.参考文献
(1)
大森康平,青山佳祐,山崎芳昭,遠隔操縦型レスキューロボットの開発-被災者発見用5
自由度マニピュレータの新規設計と実験評価-,日本設計工学会研究発表講演会講演論文 集,vol. 2014春季,pp. 103-104,2014.(2)
川上幸男,医療・福祉・災害救助へ向けた新たな利用展開 空気圧シリンダを用いた多 関節マニピュレータ,油空圧技術,Vol. 51,No. 1,pp. 12-16,2012.(3) KELKAR A. G. and JOSHI S. M., Capture and Control of Unknown Space Objects with Flexible Multi-Link Manipulators, Proc Am Control Conf, Vol. 2014, Vol. 3, pp. 1605-1606, 2014.
(4)
原田研介,マニピュレーション研究―把持計画を中心とした研究動向―,日本ロボット 学会誌,Vol. 31,No. 4,pp. 320-325,2013.(5)
山脇輔, 八島真人,全腕マニピュレーションのためのランダム操り計画,日本ロボット 学会誌,Vol. 32,No. 3,pp. 286-294,2014.(6)
木村宣隆,伊藤潔人,太田順,移動型作業ロボットのためのグラスプレス・マニピュレ ーションを含めた把持動作計画手法,日本ロボット学会学術講演会予稿集,Vol. 32, Page.
ROMBUNNO.3N1-03,2014.
(7) Seong-Hee Jeong,高橋隆行,庄司道彦,中野栄二,緩衝機能を有する衝突検知システム
を用いたマニピュレータの危害力の低減,日本ロボット学会誌,Vol. 23, No. 8,pp.
949-956,2005.
(8)
後藤大輔, 琴坂信哉, 大滝英征,マニピュレータ衝突時の安全性向上のための衝撃力軽 減動作,日本ロボット学会学術講演会予稿集,Vol. 24th,p. 2C23,2006.(9)
森田寿郎,菅野重樹,メカニカルソフトネスとコンプライアンス調節,日本ロボット学 会誌,Vol. 17,No. 6,pp. 790-794,1999.(10) CHOI H. R., Soft Actuator Based on Dielectric Elastomer,
計測と制御, Vol. 54, No. 1, pp.21-26, 2015.
(11)
橋本稔,積層型PVC
ゲルアクチュエータの応用展開,精密工学会誌,Vol. 80,No. 8,pp. 727-730,2014.
(12)
豊田晃央,ラバーアクチュエータのロボット医療分野への応用:心臓補助装置の研究動向,精密工学会誌,Vol. 80,No. 8,pp. 718-721,2014.
(13) T. Nakamura, N. Saga, and K. Yaegashi, Development of Pneumatic Artificial Muscle based on Biomechanical Characteristics, in Proc. IEEE Int. Conf. Industrial Technology (ICIT 2003), pp.
729-734, 2003.
(14) G. K. Klute, J. M. Czernieki, and B. Hannaford, McKibben Artificial Muscles: Pneumatic Actuators with Biomechanical Intelligence, Proc. IEEE/ASME Int. Conf. Advanced Intelligent Mechatronics 1999, pp. 221-226, 1999.
(15) B. J. Park, C. W. Park, S. W. Yang, H. M. Kim, and H. J. Choi, Core-Shell Typed Polymer Coated-Carbonyl Iron Suspension and Their Magnetorheology, ERMR08, p. 102, 2008.
(16)
中野政身,ER/MR流体のレオロジー及び流動特性,可視化情報,Vol. 27,No. 105,pp.103-110,2007.
(17)
上村直樹,大須理英子,岩崎裕志,中野恵理,Chris M. Harris,和田安弘,川人光男,タ スク最適化とスティフネスの選択,電子情報通信学会技術研究報告. NC, ニューロコン ピューティング,Vol. 103,No. 228,pp. 37-42,2003.(18)
市川泰久,望山洋,藤本英雄,物体投擲のためのねじりばねの直列構造に基づく瞬発力 発生装置,日本ロボット学会誌,Vol. 29,No. 1,pp. 47-54,2011.(19) T. Senoo, A. Namiki and M. Ishikawa, High-speed Throwing Motion Based on Kinetic Chain Approach, Proc. of the 2008 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems(IROS08), pp. 3206-3211, 2008.
(20) H. Arisumi, K. Yokoi, T. Kotoku and K. Komoriya, Casting Manipulation (Experiments of Swing and Gripper Throwing Control), JSME International Journal of Mechanical Systems, Machine elements and Manufacturing, Vol. 45, No. 1, pp. 267-274, 2002.
(21) E. Watari, H. Tsukagoshi, Y. Kitagawa and A. Kitagawa, MAGNETIC BRAKE CYLINDER TO ENHANCE TRAVERSE ABILITY AND ITS APPLICATION TO RESCUE ROBOTS, Proc. of the 7th JFPS International Symposium on Fluid Power, pp. 533-538, 2008.
(22) T. Nakamura and H. Shinohara, Position and Force Control Based on Mathematical Models of
Pneumatic Artificial Muscles Reinforced by Straight Glass Fibers, in Proc. IEEE Int. Conf.
Robotics and Automation (ICRA 2007), pp. 4361-4366, 2007.
(23)
香川 利春,藤田 壽憲,山中 孝司,人工筋アクチュエータの非線形モデル,計測自動 制御学会論文集,Vol. 29,No. 10,pp. 1241-1243,1993.(24)
古荘純次,菊池武士,大月喜久子,人間共存型メカトロニクスのための安全性の高いコ ンパクトMR
アクチュエータ,日本機械学会年次大会講演論文集,Vol. 2009, No. Vol. 7,
pp. 245-246,2009.
(25) S. Tungpataratanawong, K. Ohishi and T. Miyazaki, Force Sensor-less Workspace Impedance Control Considering Resonant Vibration of Industrial Robot, 31st Annual Conference of the IEEE Industrial Electronics Society (IECON 2005), Vol. 31st, Vol. 3, pp. 1878-1883, 2005.
(26) HIRZINGER G., BUTTERFASS J., FISCHER M., GREBENSTEIN M., HAEHNLE M., LIU H., SCHAEFER I. and SPORER N., A Mechatronics Approach to the design of light-weight arms and multifingered hands., Proc. IEEE Int. Conf. Rob Autom, Vol. 2000, No. Vol. 1, pp.
46-54, 2000.
(27)
稲葉智也,中沢俊貴,小金澤鋼一,非線形弾性機構を有するアクチュエータ(ANLES)を 用いた拮抗型関節の剛性と角度制御,日本ロボット学会誌,Vol. 26, No. 4, pp. 381-388,
2008.
(28)
岡崎安直,小松真弓,空気圧人工筋を用いたバックドライバブルなパワーアシストアー ム,日本ロボット学会誌,Vol. 31,No. 6,pp. 577-580,2013.(29)
則次俊郎,安藤文典,堂田周治郎,山中孝司,ゴム人工筋を用いたロボットマニピュレ ータの位置と力のハイブリッド制御,日本機械学会論文集 C編,Vol. 61,No. 586,pp.2483-2488,1995.
(30) T. KIYOTA, Y. MINAMIYAMA, Y. FUJITA and N. SUGIMOTO, Two-Link Pneumatic Artificial Muscle Manipulator Based on Passive Dynamic Control, Annu. Conf. IEEE Ind.
Electron. Soc., Vol. 39th, Vol. 6, pp. 4294-4299, 2013.
(31) T. NORITSUGU, Y. TSUJI and K. ITO, Improvement of Control Performance of Pneumatic Rubber Artificial Muscle Manipulator by Using Electroreological Fluid Damper., Proc. IEEE Int.
Conf. Syst. Man Cybern., Vol. 1999, No. Vol. 4, pp. IV.788-IV.793, 1999.
(32)
本堂貴敏,水内郁夫,1自由度モータ‐ばね直列連成系の解析と速度拡大効果に着目し た最適設計理論,日本ロボット学会誌,Vol. 29,No. 8,pp. 675-682,2011.第 2 章 軸方向繊維強化型人工筋肉
2.1
本章の概要本論文で扱う可変粘弾性関節では,可変弾性要素と可変粘性要素を組み合わせることで実現し ている.本関節を制御するためには各要素の特性を明らかにし,これを基に制御する必要がある.
そこで,第
2
章では可変粘弾性関節の可変弾性要素である空気圧ゴム人工筋肉の特性を明らかに し,数式モデルを導出する.本アクチュエータは,ゴムのような弾性体のチューブに空気を流入させることで駆動するアク チュエータである.同じく空気圧駆動のアクチュエータとしてシリンダがあるが,ピストン部以 外の受圧面は仕事をしない.これに対して空気圧ゴム人工筋肉はチューブの壁面全てが有効な受 圧面となり,径の膨張と引き換えに高出力を発揮できる.
通常,弾性体内の空気はパスカルの原理に基づき圧力を及ぼすため,風船のように全方向に膨 張する.しかし,弾性体の膨張を拘束することで弾性体の変形に異方性が生じる.特に本章で扱 う空気圧ゴム人工筋肉は主にゴムチューブと繊維素材から構成されており,チューブに印加した 空気圧により径方向の膨張を生じ,これを繊維拘束によって長さ方向の収縮に変換する(1),(2).特 徴としては,他のアクチュエータに比べて軽量で出力密度が高く(Fig.2.1参照),柔軟であるとい う特性をもつ.
このような特徴から,リハビリテーションロボット(3)やパワーアシスト(4),(5)等,人間に直接接 触する機会の多い機械システムに適したアクチュエータとして注目されている.また,
Hill
の筋 肉モデル(6)や等尺性収縮といった生体筋の力学的評価においても,人間に近い筋肉特性を有する ことが確認されている(1),(7)(Fig.2.2,Fig.2.3参照).特に,本論文で議論される軸方向繊維強化 型ゴム人工筋肉(8),(9)は,従来のMcKibben
型ゴム人工筋(10),(11)に比べて収縮率や収縮力が高く,寿 命が長いという長所を有している(12),(13).しかしながら,本人工筋は入出力関係における非線形 性が強く,上述のような機械システムへの適用を困難にしている.さらに,人工筋を構成するた めの設計パラメータが数多く存在するため,制御仕様を満足するような幾何学的形状を得るには 種々の実験的検証を行う必要がある.また,可変粘弾性関節の利点として人間との協調作業や柔 軟な作業があるが,これを正確に遂行するためにはコンプライアンスを制御できることが必要で ある.そのために,まずは軸方向繊維強化型ゴム人工筋肉の基礎的な特性を実験的に調査する.その 後,力学的平衡モデルを提案し,本人工筋肉の設計パラメータと出力特性の力学的関係を明らか にする.また,提案された力学的平衡モデルに基づいてフィードフォワード制御器を構成し,本 人工筋肉に適用することで,入出力の線形化を試みる.さらに,コンプライアンス制御器を構成 し,本人工筋肉に適用することで,人工筋肉の剛性制御を試みる.
Fig. 2.1 Comparison of Output/weight(1990)
0 0.2 0.4 0.6 0.8 1
0 0.2 0.4 0.6 0.8 1
HUMAN 0.09MPA 0.13MPA
Force Dimensinless[F/Fm]
C ont ra ct in V el oc ity D im ens ionl es s[ V /V m ]
Fig. 2.2 Relationship between Dimensionless Contraction Velocity and Dimensionless Force
Fig. 2.3 Relationship between Dimensionless Length and Dimensionless Contraction Power
2.2
ソフトアクチュエータについて2.2.1 McKibben
型人工筋肉McKibben
型人工筋肉は従来から研究がされ,使用されている.McKibben 型人工筋肉の概要図を
Fig.2.4
に示し,仕様をTable 2.1
に示す. McKibben型人工筋肉は,円筒状のゴムチューブをスリーブ状に編みこんだ繊維コードで覆った構造になっている.そのため,McKibben型人工筋 肉に空気圧を印加すると,繊維の角度が変化することによって,軸方向に収縮量が得られる
(Fig.2.5
参照).しかし,円筒状のゴムチューブを繊維コードで覆う構造のため,ゴムチューブと繊維コードの間に摩擦が生じ,ゴムチューブを傷める問題が生じている.
Terminal l 0
Fiber d 0
Terminal
Terminal l 0
Fiber d 0
Terminal
Fig. 2.4 Photograph of the McKibben type artificial muscle 0
0.2 0.4 0.6 0.8 1 1.2
0.75 0.8 0.85 0.9 0.95 1
Length-dimensionless[L/L0]
Artificial Muscle Human Muscle
C o n tr ac tio n Po wer -d im en sio n less [F/ F0 ]
θ θ
Fig. 2.5 Angular variation of fiber on McKibben type artificial muscle
Table 2.1 Specification of the McKibben type artificial muscle Outer Diameter of the tube [mm] 11
Inner Diameter of the tube [mm] 8
Axial Length of the tube [mm] 80
2.2.2
軸方向繊維強化型人工筋肉軸方向繊維強化型人工筋肉の概要図を
Fig.2.6
に,仕様をTable 2.2
に示す.軸方向繊維強化型 人工筋肉は,円筒状のゴムチューブにグラスロービング繊維を軸方向に内包させた構造になって いる.また,グラスロービング繊維はターミナルによって強く固定されている.本人工筋肉は,空気圧を印加させると,繊維の影響で半径方向のみに膨張するため,軸方向に収縮量が得られる
(Fig.2.7
参照).また,人工筋肉に外装されているリングによって,人工筋肉の長さと直径の比(l0/d
0比)を変化させることが出来る.また,繊維をゴムチューブに内包しているので,McKibben型人 工筋肉のような繊維とゴムによる摩擦がないと考えられる.
d 0
Terminal
Ring Terminal
l 0
Rubber tube (Natural latex rubber)
Fiber (Glass Fiber) d 0
Terminal
Ring Terminal
l 0
Rubber tube (Natural latex rubber)
Fiber (Glass Fiber)
Fig. 2.6 Photograph of the straight fibers type artificial muscle
Fig. 2.7 Contraction of straight fiber type artificial muscle
Table 2.2 Specification of the straight fibers type artificial muscle Outer Diameter of the tube [mm] 11 Inner Diameter of the tube [mm] 8
Axial Length of the tube [mm] 80
Number of Rings 0 , 1 , 2
2.2.3 McKibben
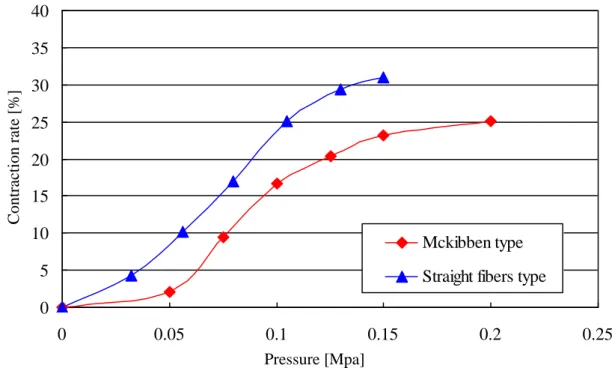
型人工筋肉と軸方向繊維強化型人工筋肉の比較本項では,McKibben 型人工筋肉と軸方向繊維強化型人工筋肉の特性について比較を行った.
ここで,比較に用いる人工筋肉はいずれも全長・厚さが等しいものを使用して実験を行った.
Fig.2.8
に圧力と収縮率の関係,Fig.2.9 に圧力と収縮力の関係を示した実験結果を示す.図より,同じ圧力下において軸方向繊維強化型人工筋肉と
McKibben
型人工筋肉を比較した場合,軸 方向繊維強化型人工筋肉の方がより大きな収縮率を得ていることが分かる.また,収縮力におい ても同様のことが言える.これは
McKibben
型人工筋肉の繊維拘束がスリーブ状繊維によってなされており,径方向の膨張を制限しているためと考える.空気圧ゴム人工筋肉は径方向の膨張を軸方向の収縮に変換する ため,径方向の膨張が制限されると収縮率の低減につながる.一方,軸方向繊維強化型人工筋肉 は径方向の繊維拘束が
McKibben
型人工筋肉に比べ少ないため,収縮率と収縮力において上回っ たと考える.以上より,本研究では軸方向繊維強化型人工筋肉をアクチュエータとして採用する.0 5 10 15 20 25 30 35 40
0 0.05 0.1 0.15 0.2 0.25
presuure [MPa]
cont ra ct ion r at e[ % ]
Mckibben type Straight fibers type
Pressure [Mpa]
Contra cti on rat e [%]
Fig. 2.8 Relationship between pressure and contraction rate
0 50 100 150 200 250
0 0.05 0.1 0.15 0.2 0.25
Pressure [MPa]
C ont ra cti on forc e[N]
Mckibben Type Straight Fibers Type
Mckibben type Straight fibers type
Fig. 2.9 Relationship between pressure and contraction force
2.3
軸方向繊維強化型人工筋肉の基礎特性軸方向繊維強化型人工筋肉は
2.2.2
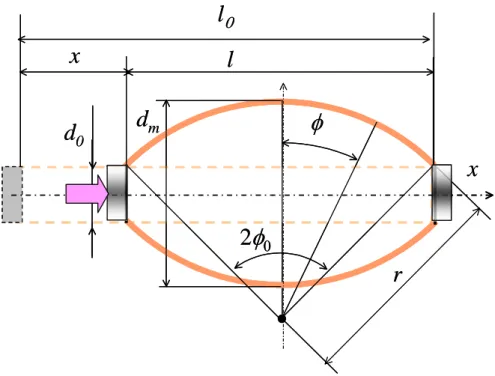
項で述べたように軸方向に繊維を内包し,チューブの膨張 を区切るようにリングを有する.繊維はチューブの膨張を収縮に変換する要素であり,リングは チューブの過膨張による破損を防ぐだけでなく,人工筋肉の長さと直径の比を変化させる役割が ある.ここで,Fig2.11
に人工筋肉の径と全長について示す.Fig.2.11
において収縮前の全長はl
0, 径はd
0とし,収縮時の最大膨張径はd
m,全長はl
とする.両者は本人工筋肉の出力特性に大き く関わるため,本節では軸方向繊維強化型人工筋肉の繊維数とリング数が特性に及ぼす影響を調 べる.そのために,繊維数やリング数の異なる人工筋肉(Fig.2.10)を作成し,基礎特性実験を 行う.本実験では各人工筋肉の収縮率-圧力,最大膨張率-圧力の関係を求め,比較検討を行う.Fig. 2.10 Difference of number of fibers and rings
Fig. 2.11 Contraction ratio and expansion ratio
l
d m
l 0
d 0
2.3.1
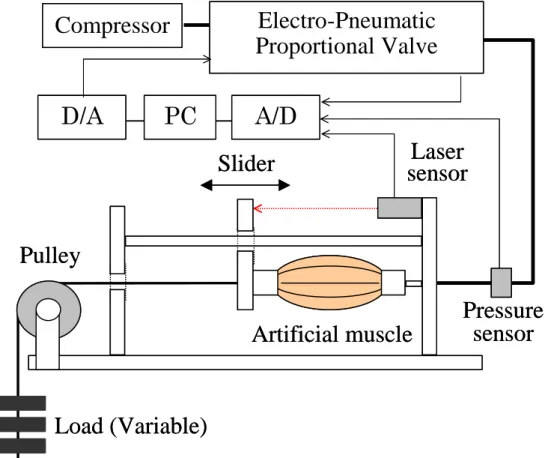
人工筋肉特性試験装置本実験で用いた実験装置を
Fig.2.12
に示す.本装置は電圧信号によって,空気圧制御を行って いる.この電圧信号と空気圧回路の流れについてそれぞれ説明する.また,実験システムのセン サ・各種変換機・PCの詳細についてTable 2.3
に記す.まず,人工筋肉へ印加する空気圧の値を入力値とし,パーソナル・コンピュータ(以下
PC
と 表記)からD/A
変換機を介して比例電磁弁に入力される.次に,入力信号を受けた比例電磁弁 は,コンプレッサから排出される一定の空気圧を,入力信号に応じた圧力に調節して人工筋肉へ と印加する.このとき,人工筋肉の収縮量,内部圧力,収縮力はそれぞれ変位センサ,圧力セン サ,力覚センサによって計測する.そして,各センサの計測値は出力信号としてA/D
変換器を 介してPC
に記録される.Electro-Pneumatic Proportional Valve
Pressure sensor Compressor
Laser sensor Slider
Artificial muscle Pulley
Load (Variable) PC
D/A A/D
Electro-Pneumatic Proportional Valve
Pressure sensor Compressor
Laser sensor Slider
Artificial muscle Pulley
Load (Variable) PC
D/A A/D
Fig. 2.12 Configuration of the experimental setup
Table 2.3 Peripheral device of the experimental setup
Peripheral device Maker: Equipment
Laser sensor OPTEX: CD3-100 (100±40 [mm])
KEYENCE: Analog controler ・ RD-50E
Pressure sensor NEC Sanei: 9E02-P11-1MPA
Load sensor KYOWA: LUR-A-200NSA1
Electro-pneumatic proportional valve SMC: VER4000
Compressor JUN-AIR: OF302-15B
Analog-to-digital converter ADTEK: AB98-05B Digital-to-analog converter ADTEK: AB98-06B
2.3.2.
繊維数による特性の違い本実験では人工筋肉に内包された繊維の本数による特性の違いについて検討する.使用する人 工筋肉のゴムの厚さ,全長は等しく,繊維の本数のみが違う条件下で実験を行った.ここでは,
繊維の数を
4,8,16
本の3
種類を用意して比較検討を行う.また繊維の数が4,8
本の場合,繊維の 拘束を受けていないゴム部分が大きく膨張し,最大膨張率の測定ができない.そのため,人工筋 肉が均一に膨張できる範囲で実験を行う.ここで,Fig.2.13 に圧力―収縮率の関係,Fig.2.14 に圧力―最大膨張率の関係の実験結果を示
す.
Fig.2.13
より繊維数の増加に応じて,同圧力印加時の収縮率も上昇している.また,Fig.2.14より繊維の本数が増えるほど最大膨張率も大きくなることが分かる.本人工筋肉内では,空気圧 によって繊維が径方向に力を受け,これを繊維の張力として収縮力に変換している.そして,外 力による軸方向の引張り力や,軸方向にかかる圧力と平衡状態を保つ.そのため,繊維の本数が 少ないと収縮させる力が減少すると考える.このことから,繊維の拘束数が増加するほど,人工 筋肉は高い収縮率・最大膨張率を示すということが言える.また,繊維の無い部分に圧力がかか ることにより,過膨張と破裂の恐れもある.以上より,繊維数は多く外周を覆うようにするのが 望ましいと考える.
0 5 10 15 20 25 30 35 40
0 0.02 0.04 0.06 0.08
Pressure[MPa]
Fiber4 Fiber8 Fiber16
Contr ac ti on Rat e[% ]
Fig. 2.13 Relationship between pressure and contraction rate in respective number of fibers
100 150 200 250 300 350 400
0 0.02 0.04 0.06 0.08
Pressure [MPa]
Fiber4 Fiber8 Fiber16
T he M ax imum E xp ans ion Rat e [% ]
Fig. 2.14 Relationship between pressure and the maximum expansion rate in respective number of fibers
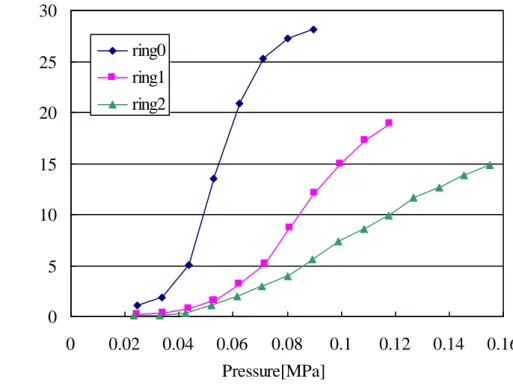
2.3.3.
リング数による特性の違い本項では,リング数による違いについて検討する.人工筋肉は,繊維数
16
本(人工筋肉の全周 に繊維が覆われている状態)をひとつ使用し,その両端にリングを用意しておき,リングをスラ イドさせることによってこぶの数を変化させて実験を行った.従って,どの結果もゴムの厚さ,全長は等しい.また,リングの数を
0,1,2
個の3
種類を用いて実験を行った.なお,リング0
は こぶ数が1
個,リング1
はこぶ数が2
個,リング2
個はこぶ数が3
個の状態を示す.そのため,リング数を変化させることによって,人工筋肉の全長と半径の比を変化させることが出来る.こ こで,リングの数に対応する実際の
l
0/d
0比をTable 2.4
に示す.そして,Fig.2.15 に圧力―収縮率の関係,Fig.2.16 に圧力―最大膨張率の関係の実験結果を示
す.
Fig.2.15
より,リング数が増えるほど収縮率が小さくなるのが分かる.これはFig.2.16
から,径方向の変形をリングによって制限された結果であると考える.このことから,リングを増やす ほど,最大膨張率を抑えることが出来るが,収縮率が小さくなり,また,同じ収縮を得るために は高い圧力が必要になるということが分かる.径の膨張は本人工筋肉をアクチュエータとして機 構に組み込む際に考慮しなければならない要素である.
以上より,収縮率,膨張率,圧力のいずれに重点を置くかでリング数を決められると考える.
しかしながら,リングを使用せずに大きな径の膨張と軸方向の収縮を得る場合,ゴムの大きな変 形が人工筋肉の破損につながる可能性もあることに注意しなければならない.
Table 2.4 Relationship between number of rings and l
0/d
0ratio
Ring0 Ring1 Ring2
l₀:φ₀ 5.71:1 2.92:1 1.86:1
0 5 10 15 20 25 30
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 Pressure[MPa]
ring0 ring1 ring2
Contr ac ti on Rat e[% ]
Fig. 2.15 Relationship between pressure and contraction rate in respective number of rings
100 120 140 160 180 200 220 240 260
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 Pressure [MPa]
ring0 ring1 ring2
T he M ax imum E xp ans ion Rat e [% ]
Fig. 2.16 Relationship between pressure and the maximum expansion rate in respective number of rings
2.4
人工筋肉の力学的平衡モデルの導出本人工筋肉は既に述べたとおり,印加圧力,収縮力,収縮量の間に強い非線形特性を有してい る.そのため,目標の収縮力,収縮量から必要な空気圧を求める事が困難である.また,圧力に 対する不感帯やヒステリシスもあり,制御の不便さにつながっている.清戸ら(14)は人工筋肉の 有するヒステリシスに着目し補償器を設計したが,著者らは制御の際の印加圧力,収縮力,収縮 量の関係を求める事が重要であると考えた.そこで,本節では軸方向繊維強化型人工筋肉につい て数式モデルを導出し,前述の
3
要素の関係を表す.本モデルを制御に用いることで制御部への 入力と人工筋肉からの出力が線形となり,制御性が向上することが期待できる.また,理想の特 性を実現する人工筋肉の設計を検討するために本モデルを使用することも可能である.本モデルの導出にあたり,始めに人工筋肉の形状モデルを定める.そして,その形状モデルを もとに力学的な平衡関係から静的モデルを導出する.
2.4.1
人工筋肉の形状モデル力学的平衡モデルを構成するにあたり,まず,人工筋肉に内圧が生じた場合の形状変化を決定 する.まずパスカルの原理により,人工筋肉に印加される圧力はどの壁面にも等しくかつ直角に 印加されるもの仮定すると,収縮時における軸方向の断面図は
![Fig. 2.1 Comparison of Output/weight(1990) 0 0.2 0.4 0.6 0.8 100.20.40.60.81HUMAN0.09MPA0.13MPA Force Dimensinless[F/Fm]](https://thumb-ap.123doks.com/thumbv2/123deta/6356637.2129169/17.892.231.649.162.613/fig-comparison-output-weight-human-mpa-force-dimensinless.webp)
![Fig. 2.4 Photograph of the McKibben type artificial muscle 00.20.40.60.811.20.750.80.850.90.95 1Length-dimensionless[L/L0]Artificial MuscleHuman MuscleContraction Power-dimensionless[F/F0]](https://thumb-ap.123doks.com/thumbv2/123deta/6356637.2129169/18.892.154.729.889.1061/photograph-mckibben-artificial-dimensionless-artificial-musclehuman-musclecontraction-dimensionless.webp)