Complex Contact Structures on Nilmanifolds
76
0
0
全文
(2)(3)
(4)
(5)
(6)
(7)
(8)(9)
(10)
(11)
(12)(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
(24)
(25)
(26)
(27)
図
+5
関連したドキュメント
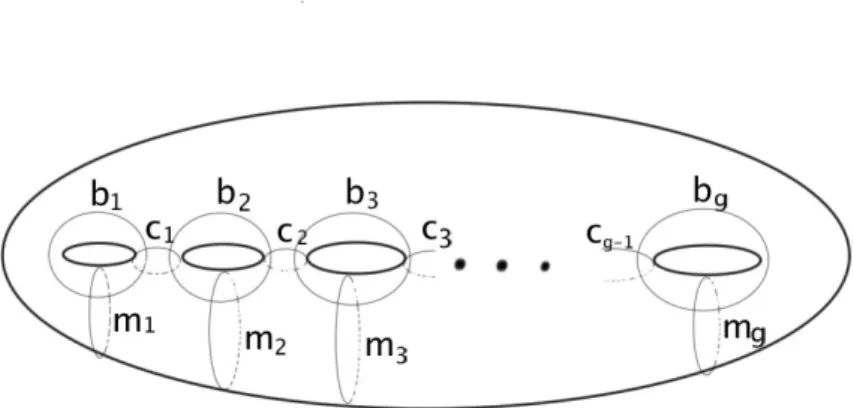
In particular, Proposition 2.1 tells you the size of a maximal collection of disjoint separating curves on S , as there is always a subgroup of rank rkK = rkI generated by Dehn
Keywords: continuous time random walk, Brownian motion, collision time, skew Young tableaux, tandem queue.. AMS 2000 Subject Classification: Primary:
Such simple formulas seem not to exist for the Lusztig q-analogues K λ,μ g (q) even in the cases when λ is a single column or a single row partition.. Moreover the duality (3) is
Answering a question of de la Harpe and Bridson in the Kourovka Notebook, we build the explicit embeddings of the additive group of rational numbers Q in a finitely generated group
Debreu’s Theorem ([1]) says that every n-component additive conjoint structure can be embedded into (( R ) n i=1 ,. In the introdution, the differences between the analytical and
We now show that the formation of the Harder-Narasimhan filtration commutes with base change, thus establishing the slope filtration theorem; the strategy is to show that a
We give a Dehn–Nielsen type theorem for the homology cobordism group of homol- ogy cylinders by considering its action on the acyclic closure, which was defined by Levine in [12]
In fact, the homology groups in the top 2 filtration dimensions for the cabled knot are isomorphic to the original knot’s Floer homology group in the top filtration dimension..
